Maritime Broadband Communication: Wireless Channel Measurement and Characteristic Analysis for Offshore Waters



Abstract
:1. Introduction
- The broadband wireless channel measurements over the offshore water are presented. In the measurements, 5.9 GHz and 100 MHz are employed as the carrier frequency and bandwidth, respectively. The temporary S2I and S2S wireless communication networks are built.
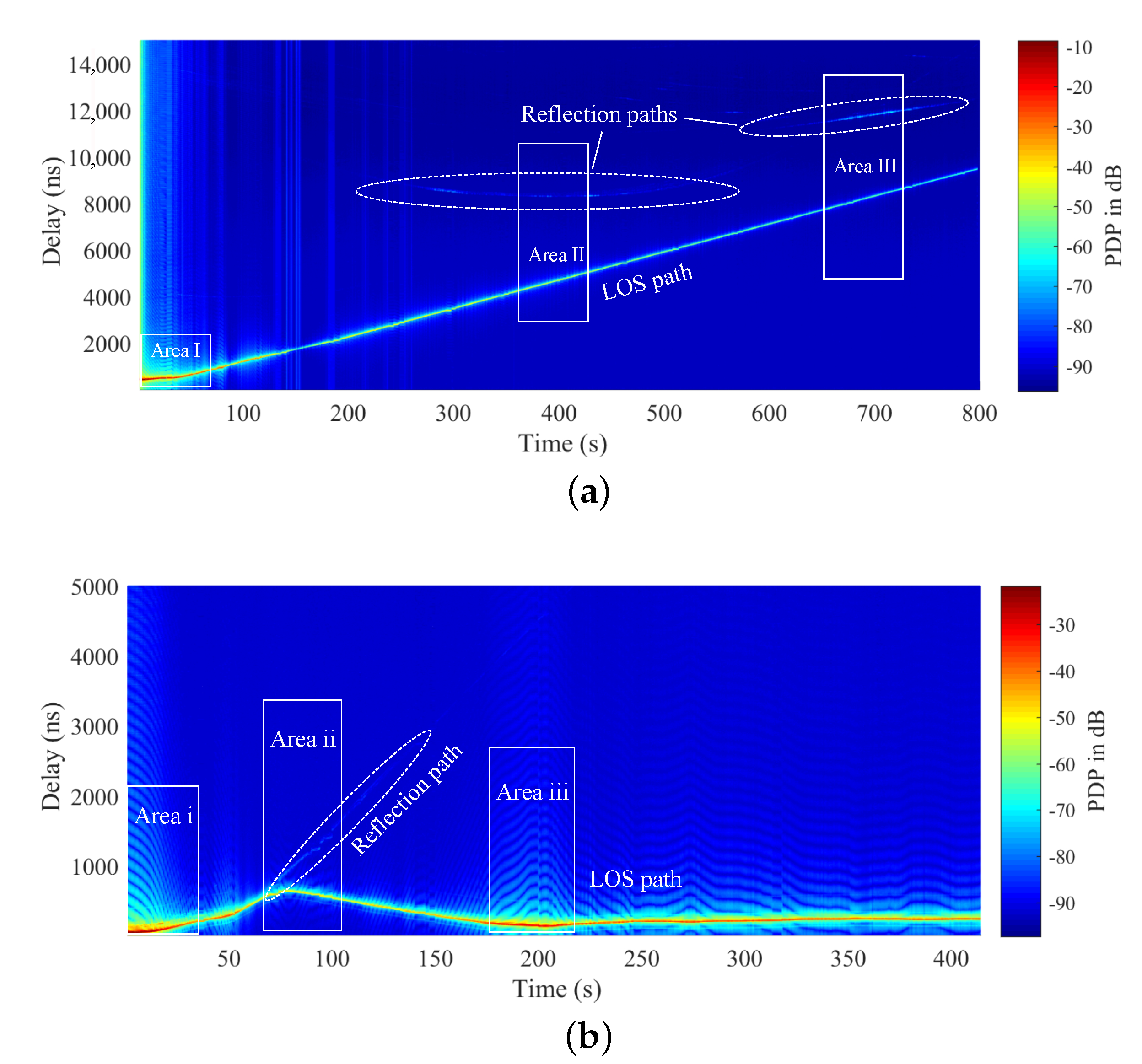
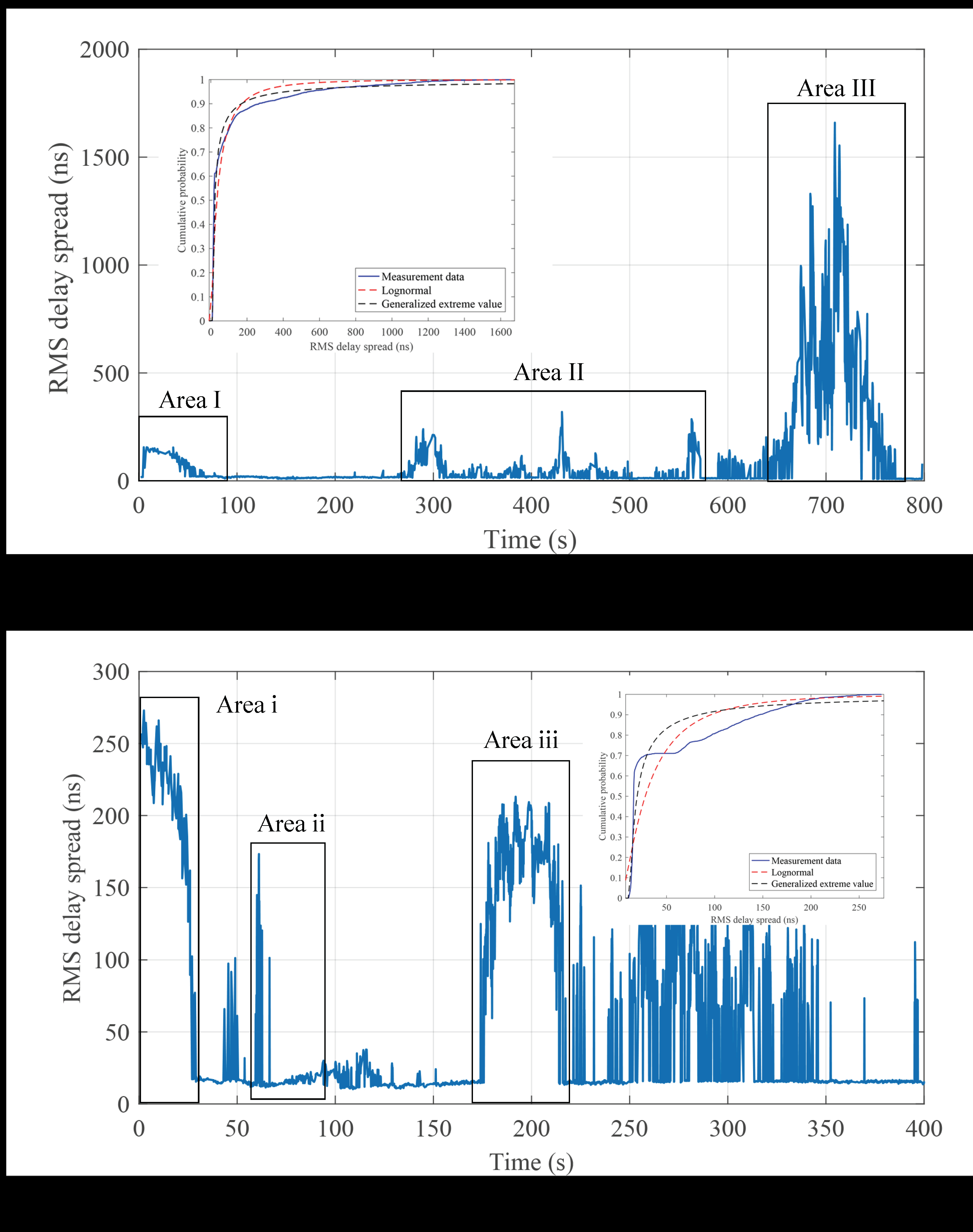
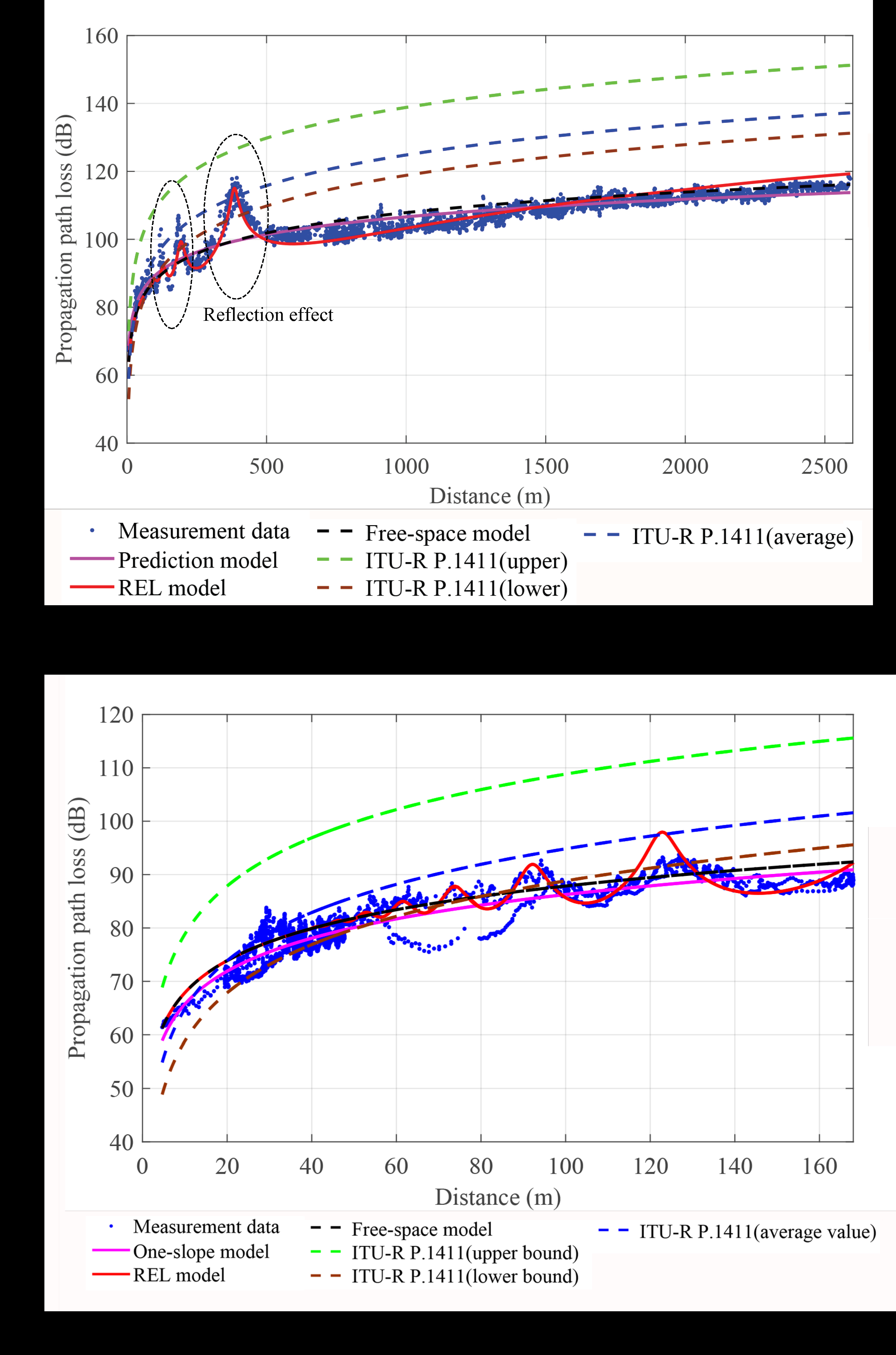
- Typical wireless channel characteristics over the offshore water are extracted. Based on the measurement data, the channel characteristics, including power delay profile, delay spread and propagation path loss are analyzed. The impact from water surface on the wireless channel characteristics are presented.
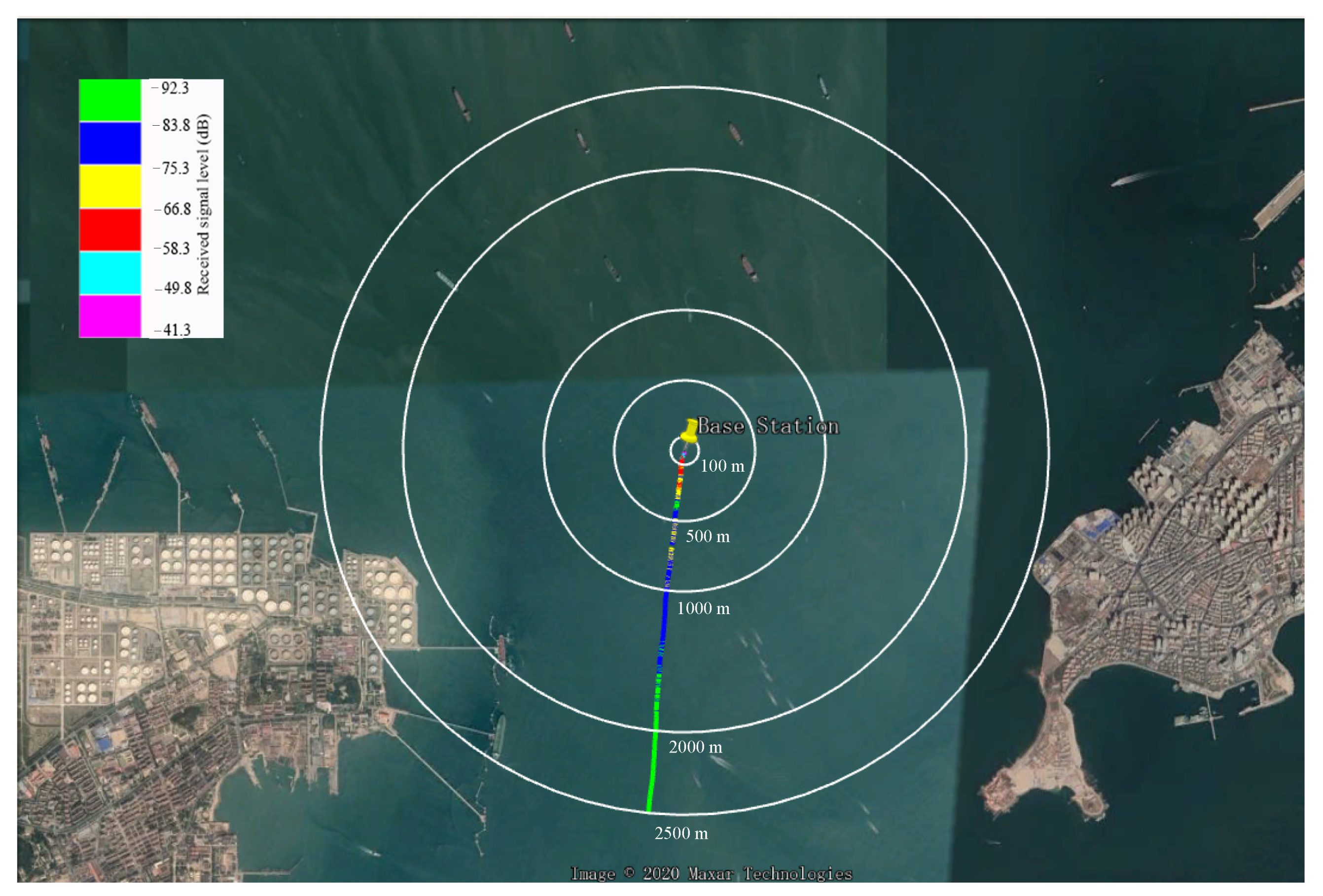
- According to the parameter of the measurement campaign and environment, the effective coverage range of the wireless signal and the channel capacity over the offshore water are predicted and the communication performance is evaluated.
2. Experiments
2.1. Ship-to-Infrastructure Wireless Channel Measurement
2.2. Ship-to-Ship Wireless Channel Measurement
2.3. Data Pre-Processing
3. Results and Discussion
3.1. Power Delay Profile
3.2. RMS Delay Spread
3.3. Propagation Path Loss
4. Performance Evaluation of Offshore Communications
4.1. Power Coverage
4.2. Channel Capacity
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Shah, S.A.A.; Ahmed, E.; Imran, M.; Zeadally, S. 5G for vehicular communications. IEEE Commun. Mag. 2018, 56, 111–117. [Google Scholar] [CrossRef]
- Shen, X.; Fantacci, R.; Chen, S. Internet of Vehicles. Proc. IEEE 2020, 108, 242–245. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, C.X.; Huang, J. Recent developments and future challenges in channel measurements and models for 5G and beyond high-speed train communication systems. IEEE Commun. Mag. 2019, 57, 50–56. [Google Scholar] [CrossRef]
- Ai, B.; Molisch, A.F.; Rupp, M.; Zhong, Z.D. 5G Key Technologies for Smart Railways. Proc. IEEE 2020, 108, 856–893. [Google Scholar] [CrossRef]
- Fei, J.; Wang, X.; Wang, W. Application of 5G communication technology in telemedicine. Inf. Commun. Technol. Policy 2019, 45, 92. [Google Scholar]
- Bauk, S. A Review of NAVDAT and VDES as Upgrades of Maritime Communication Systems. In Advances in Marine Navigation and Safety of Sea Transportation; CRC Press: Boca Raton, FL, USA, 2019; pp. 81–87. [Google Scholar]
- Manoufali, M.; Alshaer, H.; Kong, P.Y.; Jimaa, S. An overview of maritime wireless mesh communication technologies and protocols. Int. J. Bus. Data Commun. Netw. (IJBDCN) 2014, 10, 1–29. [Google Scholar] [CrossRef] [Green Version]
- Valčić, S.; Mrak, Z.; Gulić, M. Analysis of advantages and disadvantages of existing maritime communication systems for data exchange. Pomorstvo 2016, 30, 28–37. [Google Scholar] [CrossRef]
- Ilčev, S.D. Global Mobile Satellite Communications Theory; Springer: Berlin, Germany, 2017. [Google Scholar]
- Disant, A.; Dias, F. Microwave Propagation in Maritime Environments. Mar. Technol. Soc. J. 2020, 54, 17–24. [Google Scholar] [CrossRef]
- Huo, Y.; Dong, X.; Beatty, S. Cellular Communications in Ocean Waves for Maritime Internet of Things. IEEE Internet Things J. 2020, 7, 9965–9979. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Feng, W.; Wang, J.; Chen, Y.; Ge, N.; Wang, C.X. Enabling 5G on the Ocean: A Hybrid Satellite-UAV-Terrestrial Network Solution. arXiv 2020, arXiv:2006.00826. [Google Scholar] [CrossRef]
- Yang, H. A Cost-Effective Ship Safety Data Transfer in Coastal Areas. J. Coast. Res. 2018, 1206–1210. [Google Scholar] [CrossRef]
- Lee, M.K.; Park, Y.S. Collision prevention algorithm for fishing vessels using mmWAVE communication. J. Mar. Sci. Eng. 2020, 8, 115. [Google Scholar] [CrossRef] [Green Version]
- Aslam, S.; Michaelides, M.P.; Herodotou, H. Internet of ships: A survey on architectures, emerging applications, and challenges. IEEE Internet Things J. 2020, 7, 9714–9727. [Google Scholar] [CrossRef]
- Mashino, J.; Tateishi, K.; Muraoka, K.; Kurita, D.; Suyama, S.; Kishiyama, Y. Maritime 5G experiment in windsurfing world cup by using 28 GHz band Massive MIMO. In Proceedings of the 2018 IEEE 29th Annual International Symposium on Personal, Indoor and Mobile Radio Communications (PIMRC), Bologna, Italy, 9–12 September 2018; pp. 1134–1135. [Google Scholar]
- Zeng, J.; Sun, J.; Wu, B.; Su, X. Mobile edge communications, computing, and caching (MEC3) technology in the maritime communication network. China Commun. 2020, 17, 223–234. [Google Scholar] [CrossRef]
- Norway, S.I. Maritime 5G Will Hasten IoT Adoption in Shipping Industry. 2019. Available online: https://www.hellenicshippingnews.com/maritime-5g-will-hasten-iot-adoption-in-shipping-industry/ (accessed on 25 November 2019).
- News, H.S. Contributes to the Construction of the World’s First Autonomous Ship. 2019. Available online: https://www.smartinnovationnorway.com/nyheter/utvikler-5g-teknologi -som-lar-bater-snakke-med-hverandre/ (accessed on 22 February 2019).
- Firoozi, F.; Borhani, A.; Pätzold, M. Experimental characterization of mobile fading channels aiming the design of non-wearable fall detection radio systems at 5.9 GHz. In In Proceedings of the 2016 IEEE International Conference on Communication Systems (ICCS), Shenzhen, China, 14–16 December 2016; pp. 1–6. [Google Scholar]
- Li, C.; Yang, K.; Yu, J.; Li, F.; Shui, Y.; Chang, F.; Chen, W. V2V Radio Channel Performance Based on Measurements in Ramp Scenarios at 5.9 GHz. IEEE Access 2018, 6, 7503–7514. [Google Scholar] [CrossRef]
- Li, C.; Yu, J.; Chen, W.; Wang, K.; Yang, K. Measurements and analysis of vehicular radio channels in the inland lake bridge area. IET Microw. Antennas Propag. 2019, 13, 1394–1401. [Google Scholar] [CrossRef]
- Pätzold, M. Mobile Radio Channels; John Wiley & Sons: New York, NY, USA, 2011. [Google Scholar]
- Guan, K.; Zhong, Z.; Ai, B.; Kürner, T. Propagation measurements and analysis for train stations of high-speed railway at 930 MHz. IEEE Trans. Veh. Technol. 2014, 63, 3499–3516. [Google Scholar] [CrossRef]
- He, R.; Zhong, Z.; Ai, B.; Wang, G.; Ding, J.; Molisch, A.F. Measurements and analysis of propagation channels in high-speed railway viaducts. IEEE Trans. Wirel. Commun. 2012, 12, 794–805. [Google Scholar] [CrossRef]
- Molisch, A.F. Wireless Communications; John Wiley & Sons: New York, NY, USA, 2012; Volume 34. [Google Scholar]
- He, R.; Molisch, A.F.; Tufvesson, F.; Zhong, Z.; Ai, B.; Zhang, T. Vehicle-to-vehicle propagation models with large vehicle obstructions. IEEE Trans. Intell. Transp. Syst. 2014, 15, 2237–2248. [Google Scholar] [CrossRef]
- He, R.; Zhong, Z.; Ai, B.; Ding, J.; Yang, Y.; Molisch, A.F. Short-term fading behavior in high-speed railway cutting scenario: Measurements, analysis, and statistical models. IEEE Trans. Antennas Propag. 2012, 61, 2209–2222. [Google Scholar] [CrossRef]
- Abbas, T.; Bernadó, L.; Thiel, A.; Mecklenbrauker, C.F.; Tufvesson, F. Measurements based channel characterization for vehicle-to-vehicle communications at merging lanes on highway. In Proceedings of the 2013 IEEE 5th International Symposium on Wireless Vehicular Communications (WiVeC), Dresden, Germany, 2–3 June 2013; pp. 1–5. [Google Scholar]
- Fang, C.; Allen, B.; Liu, E.; Karadimas, P.; Zhang, J.; Glazunov, A.A.; Tufvesson, F. Indoor-indoor and indoor-outdoor propagation trial results at 2.6 GHz. In Proceedings of the 2012 Loughborough Antennas & Propagation Conference (LAPC), Loughborough, UK, 12–13 November 2012; pp. 1–4. [Google Scholar]
- Yang, K.; Ekman, T.; Røste, T.; Bekkadal, F. A quasi-deterministic path loss propagation model for the open sea environment. In Proceedings of the 2011 The 14th International Symposium on Wireless Personal Multimedia Communications (WPMC), Brest, France, 3–7 October 2011; pp. 1–5. [Google Scholar]
- Yang, K.; Molisch, A.F.; Ekman, T.; Røste, T.; Berbineau, M. A round earth loss model and small-scale channel properties for open-sea radio propagation. IEEE Trans. Veh. Technol. 2019, 68, 8449–8460. [Google Scholar] [CrossRef]
- Yang, K.; Molisch, A.F.; Ekman, T.; Røste, T. A deterministic round earth loss model for open-sea radio propagation. In Proceedings of the 2013 IEEE 77th Vehicular Technology Conference (VTC Spring), Dresden, Germany, 2–3 June 2013; pp. 1–5. [Google Scholar]
- Shannon. Shannon-Hartley Theorem. Available online: https://en.wikipedia.org/wiki/Shannon%E2%80%93Hartley_theorem (accessed on 1 July 2021).








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | S2I | S2S |
|---|---|---|
| Center frequency [GHz] | 5.9 | 5.9 |
| Bandwidth [MHz] | 100 | 100 |
| Delay resolution [ns] | 10 | 10 |
| Tx power [dBm] | 16 | 16 |
| Tx gain [dBi] | 16 | 2 |
| Rx gain [dBi] | 10 | 10 |
| Tx height [m] | 3.13 | 3 |
| Rx height [m] | 3.12 | 3.12 |
| Area | Parameter | I | II | III | i | ii | iii |
|---|---|---|---|---|---|---|---|
| LOS | Delay (ns) | 510 | 3400 | 8320 | 90 | 630 | 140 |
| LOS | Avreage power (dB) | −20.81 | −46.49 | −56.65 | −30.1 | −50.28 | −32.98 |
| NLOS | Delay (ns) | - | 8530 | 1.182 × 10 | 170 | 970 | - |
| NLOS | Avreage power (dB) | - | −81.8 | −72.54 | −43.53 | −84.72 | - |
| Measurement | RMS Delay Spread (ns) | ||
|---|---|---|---|
| 50% | 75% | 90% | |
| S2I | 17.52 | 75.2 | 265.8 |
| S2S | 15.9 | 70.76 | 146.1 |
| Case | Channel Capacity (Gb/s) | Average Value (Gb/s) |
|---|---|---|
| S2I | 0.47–2.51 | 1.17 |
| S2S | 1.21–2.35 | 1.72 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, C.; Yu, J.; Xue, J.; Chen, W.; Wang, S.; Yang, K. Maritime Broadband Communication: Wireless Channel Measurement and Characteristic Analysis for Offshore Waters. J. Mar. Sci. Eng. 2021, 9, 783. https://doi.org/10.3390/jmse9070783
Li C, Yu J, Xue J, Chen W, Wang S, Yang K. Maritime Broadband Communication: Wireless Channel Measurement and Characteristic Analysis for Offshore Waters. Journal of Marine Science and Engineering. 2021; 9(7):783. https://doi.org/10.3390/jmse9070783
Chicago/Turabian StyleLi, Changzhen, Junyi Yu, Jie Xue, Wei Chen, Shoufeng Wang, and Kun Yang. 2021. "Maritime Broadband Communication: Wireless Channel Measurement and Characteristic Analysis for Offshore Waters" Journal of Marine Science and Engineering 9, no. 7: 783. https://doi.org/10.3390/jmse9070783
APA StyleLi, C., Yu, J., Xue, J., Chen, W., Wang, S., & Yang, K. (2021). Maritime Broadband Communication: Wireless Channel Measurement and Characteristic Analysis for Offshore Waters. Journal of Marine Science and Engineering, 9(7), 783. https://doi.org/10.3390/jmse9070783