2. Literature Review
Many scholars have launched abundant discussions about PSAME in CTLS, whether for the single resource allocation or the integrated scheduling [
1,
2,
3]. With the continuous development of terminal handling technology and logistics service objects, the key issues are discussed constantly. Some typical studies can be sketched as follows.
On the one hand, several researches concentrate on the seaside operations of container terminals. Mauri et al. [
18] proposed an adaptive large neighborhood search heuristic to solve discrete and continuous berth allocation problem. Not coincidentally, Hsu et al. [
19] dealt with the dynamic and continuous berth allocation problem (DCBAP) in which both arrived and incoming ships are considered and a quay is used as a continuous line to accommodate as many ships as possible at one time. Kramer et al. [
20] presented two novel formulations, a time-indexed formulation and an arc-flow one, to efficiently tackle the dynamic berth allocation problem.
Chen [
21] reviewed and summarized the flexible methodology for quay crane allocation and scheduling. Azevedo et al. [
22] raised a framework for solving the 3D stowage planning problem for container ships integrated with the scheduling of quay cranes problem. Msakni [
23] put forward two exact methods to solve the quay crane scheduling problem where a task is defined as handling a single container and subject to different technical constraints. Meanwhile, it is an obvious tendency that the berth and quay crane both are taken into account simultaneously. Correcher et al. [
24] focused on the berth allocation problem and the quay crane assignment problem in an integrated way, and proposed a new mixed integer linear model to solve. Agra et al. [
25] investigated an integrated berth allocation, quay crane assignment, and scheduling problem in which a heterogeneous set of cranes was considered, and a rolling horizon metaheuristic was introduced to solve hard instances. Moreover, the uncertainty in vessel arrival times and quay crane handling rates was considered, and the recoverable robustness was introduced for the weekly berth and quay crane planning problem by Iris et al. [
26].
On the other hand, there are also lots of works focused on a series of operations on the storage yard. Tan et al. [
27] studied storage yard management in container terminals, and a flexible yard template strategy was proposed instead of the fixed yard template strategy. Jin et al. [
28] discussed the possibility of sharing container storage space among different container handling companies in a port. Boysen et al. [
29] formalized the parallel stack loading problem to intermediately store items without blocking, and the basic complexity proofs were provided. Container retrieval is also directly related to the operational efficiency of terminals, and Lin et al. [
30] developed a heuristic that can generate feasible working plans for rail-mounted gantry cranes in container yards. It is similar to the operational organization on the quayside that the multiple scheduling problems on storage yard were discussed cooperatively. Tanaka et al. [
31] addressed an exact algorithm for the block relocation problem with a stowage plan, and constructed a branch-and-bound algorithm with iterative deepening for unrestricted and restricted variants of this problem. Gharehgozli et al. [
32] integrated yard crane scheduling and container allocation problems, and extended the generalized travelling salesman problem by introducing new constraints to solve the problem. Jiang et al. [
33] combined these two closely related problems of yard crane deployment and container allocation, and formulated a mixed integer programming (MIP) model which was solved by a novel branch-and-price method to find near-optimal solutions. Galle et al. [
34] introduced a novel optimization problem resulting from the combination of two major existing problems arising at storage yards in container terminals that were the yard crane scheduling problem and container relocation problem. Jaehn et al. [
35] considered the problem of scheduling two identical rail mounted gantry cranes working within a single block at a seaport for the minimization of dwell times of vessels at the berth. A method of simultaneously optimizing the pickup sequence and the container rehandling strategy was proposed to reduce the rehandling of inbound containers given partial truck arrival information by Zeng et al. [
36].
Furthermore, the core resources on both the quayside and storage yard were considered synchronously. Hendriks et al. [
37] presented a simultaneous berth allocation and yard planning problem at a tactical level since the berth allocation had a great impact on the yard planning and vice versa, which is solved by means of an alternating berth and yard planning heuristic approach. Jin et al. [
38] tackled the berthing congestion problem simultaneously with another two tactical level decision problems of berth template design and yard template design by introducing a proactive management strategy from the terminal’s perspective that adjusted the calling schedule of feeder vessels. Liu et al. [
39] investigated the joint optimization of the tactical berth allocation and the tactical yard assignment at seaports, and proposed a comprehensive bi-objective mathematical model. Ma et al. [
40] studied an integrated berth allocation and yard planning problem with discontinuities berth layout, a mixed integer linear programming was proposed to deal with this new problem.
In addition, some scholars launched the operational optimization research from the other perspectives. Legato et al. [
41] presented a model-driven decision support system for integrated container handling with a queuing network model for resource blocking, locking, and vehicle interactions. Yu et al. [
42] applied data mining approaches to predict ship arrivals, and evaluated the value of ship arrival prediction on daily operation planning. Santos et al. [
43] presented a methodology for delimiting the potential hinterland of container terminals by using one of a set of possible intermodal or unimodal transportation solutions. Edirisinghe et al. [
44] appraised the potential of the container exchange and its practical aspects using real container data. Further, they focused on several factors that may influence container exchange among carriers. Ha et al. [
45] suggested a measurement instrument for port performance in the context of container transport logistics by taking perspectives from different port stakeholders.
It is worth mentioning that the discussion of green production and sustainable development of container terminals has attracted more and more attention. A study was conducted from a business perspective that the global container shipping sector can create value to its customers and stakeholders and go tandem with environmental aspects in the global maritime supply chains. The green operation of the calling container terminals is one of the main aspects of their competitive edge over rivals [
46]. Dulebenets [
47] presented a novel mixed integer nonlinear mathematical model for the green vessel scheduling problem, which directly accounts for the carbon dioxide (CO
2) emission costs in sea and at ports of call. Yang [
48] investigated CO
2 emissions produced by two different container terminal operating models, and sought to determine energy savings and CO
2 reduction strategies for shipping companies and terminal operators in order to comply with green port requirements. Tsai et al. [
49] established a self-management approach of quantity of greenhouse gas and pollutant emissions from a port, and undertook nine actions to ensure the full implementation of the green port policy. Yun et al. [
50] solved how to quantify the impact of mitigation strategies on the carbon emissions from port operations and shipping inside container terminals without real energy consumption data by establishing a carbon emission quantification simulation model. A convex closed-form mathematical programming model was proposed based on queueing theory to minimize CO
2 emission by optimizing the number of quay cranes (QCs) by Liu et al. [
51]. Yu et al. [
52] suggested to consider simultaneously the CO
2 emissions and workload delays to develop carbon-efficient deployment strategies. The problem of integrated berth allocation and quay crane assignment was addressed for the trade-off between time saving and energy saving in order to minimize the total departure delay of all vessels and the total handling energy consumption of all vessels by QCs [
53]. Li et al. [
54] addressed the ordinary level of land-side disruption where typically some truck arrivals deviate from their schedule in the appointment system, and they aim to find a response strategy that can maintain high resilience ability of the system in neutralizing the impact of disruptions. Venturini et al. [
55] introduced a novel mathematical formulation that extended the classical berth allocation problem to cover multiple ports in a shipping network under the assumption of strong cooperation between shipping lines and terminals.
In order to obtain a general theoretical methodology and an engineering practice solution that both are appropriate for the PSAME in CTLS, we put forward the conception of computational logistics [
13]. The computational logistics is the synthesis application of computational thinking, great principles of computing, and computational lens in the field and industry of logistics service, which was referred as 3CTGPL in our previous work [
17]. Within the conceptual framework of computational logistics, some meaningful work has been initially completed. Above all, the logistics generalized computation for container terminals (LGC-CT) is defined explicitly based on the nature of the computation by computational thinking [
16]. Next, we generalized, migrated, and localized the classical computational complexity theory into CTLS, and propose the container terminal oriented logistics generalized computational complexity [
17]. Thirdly, another milestone is that a hierarchical, parallel, heterogeneous, and reconfigurable computation model of container terminal handling is presented based on the programming model and infrastructure of parallel computation, heterogeneous computation, and reconfigurable computation [
15]. Fourthly, the underlying control mechanism in the control science and engineering, such as proportional, integral, and derivative (PID) control, is migrated into the tactical level of PSAME and obtained a good performance [
56]. Fifth, the planning and scheduling mechanism and algorithm embedded in operating system and virtual machine was transferred and customized into the operation of CTLS [
57,
58]. Lastly, we applied the computational logistics into the performance evaluation of CTLS for the typical scenario and acquired a new perspective and insight into CTLS based on the LGC-CT [
59,
60]. Now, we continue our previous work, and put forward the CTL-GCA to model, optimize, evaluate, and guide the running of container terminals, especially for the sustainable development and green production of CTLS.
3. Container Terminal Logistics Generalized Computing Architecture
3.1. Container Terminal Logistics Computational Framework
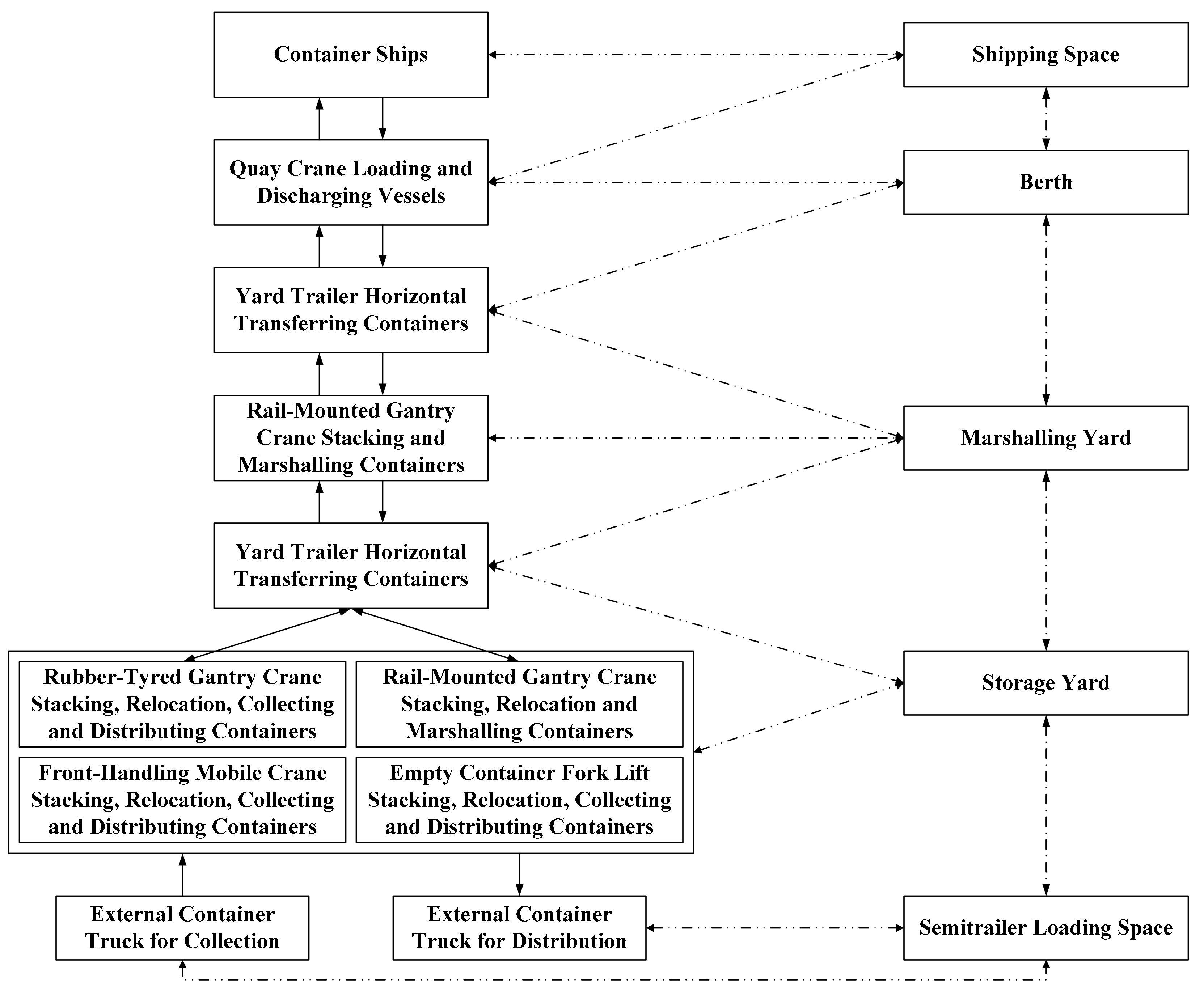
The central service objects of CTLS are container ships and the accompanying collection and distribution containers. The container terminals are the storage infrastructure essentially, therefore the shipping space, the quayside berth, marshalling yard, and storage yard all are the core resources of CTLS in the true sense. Thereupon, the PSAME at container terminals should revolve around the above working space closely under conditions prescribed by shipping liners.
The process and thread are the cornerstone of task scheduling, resource allocation, concurrency control, synchronous and asynchronous execution, and collaborative operation in computer operating systems. Based on computational logistics, every calling ship and concomitant collecting and distributing container can be abstracted as a job, and may be made a further abstraction of a series of processes as soon as CTLS begin to collect export containers for the specific liner. Usually, a job involves several kinds of processes, and they can be listed as follows: The process of collecting export containers, the one of distributing import containers, the one of handling containers for ships on quayside, the one of stacking containers for liners, and the one of transferring containers in terminal. The processes define and realize the synchronous and/or asynchronous collaborative work, and are rotated to execute at the different logistics service stage. Each process also includes several asynchronous or synchronous parallel threads that are designed to be the specific implementations of loading, unloading, transferring, stacking, relocation, collection, and distribution, etc. Moreover, the threads in the different processes constitute the dynamic, flexible, and reconfigurable operating lines as required.
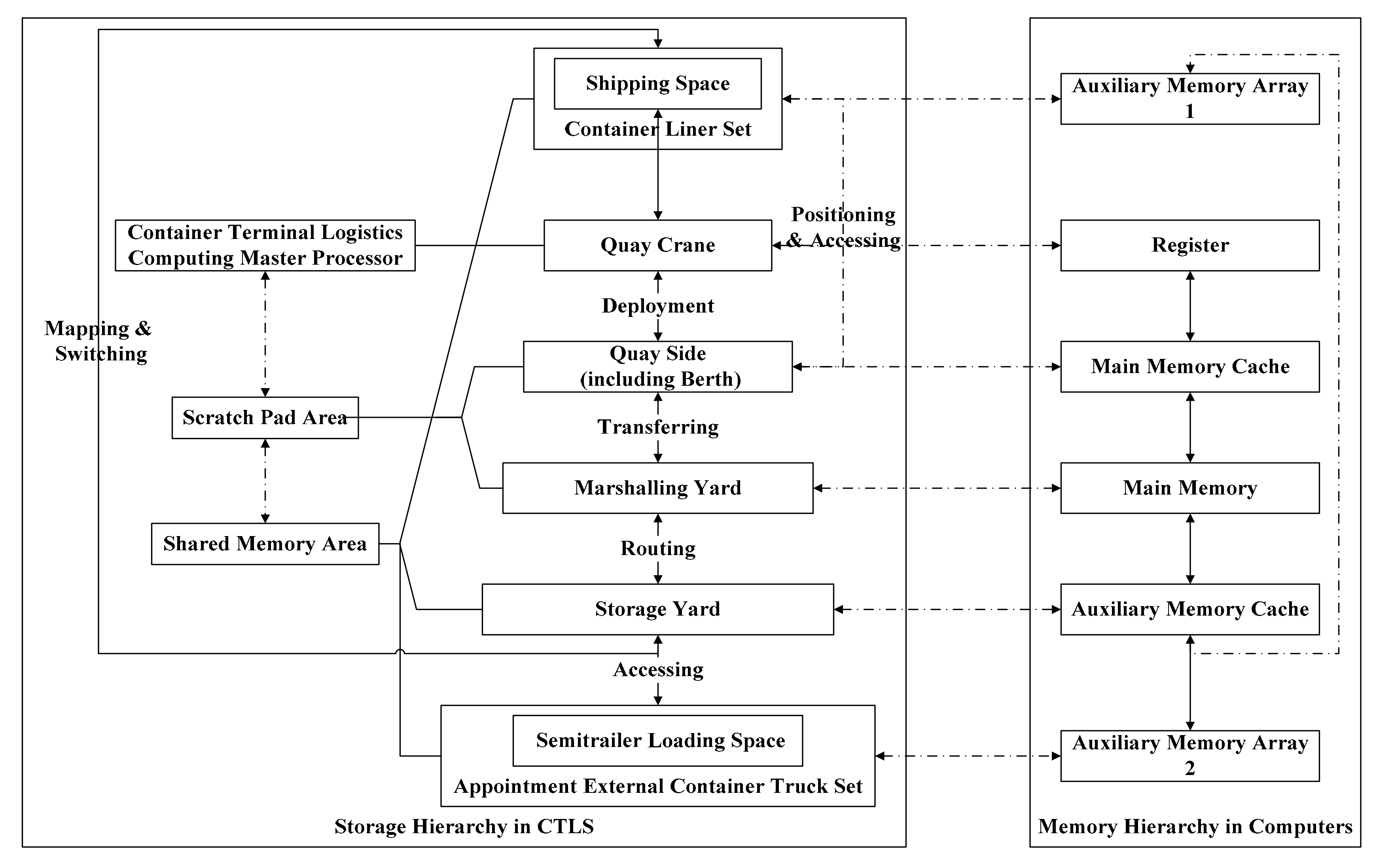
Through focusing on the above abstraction of job and process, the shipping space, quayside (including berth), marshalling yard, and storage yard all work together to construct container terminal logistics computing storage hierarchy (CTL-CSH), which is shown in
Figure 1. That demonstrates that CTLS can construct the warehousing operational hierarchy which is similar to the counterpart in computer systems that is just about four-tier architecture of processor register and cache-main memory-auxiliary memory. CTLS implement, execute, and achieve the container collection and distribution of calling ships because of CTL-CSH. It is worth mentioning that CTL-CSH is the abstraction, automation, and analysis perspective from the working granularity of container logistics unit, which is called 3AP-CLU for short. Meanwhile, CTL-CSH clearly points out the differences between CTLS and computer systems. The dissimilarities are also among the root causes of DNCC, and indicate the potential optimization paradigms and improvement directions by computational logistics as well. The hierarchy and dynamic content exchange between layers are one of the eternal themes.
The CTL-CSH focuses on container terminal logistics computing master processor (CTL-CMP) that is just about quay crane equipped by the quayside. Once a calling vessel is allocated a planned berth, the handling process in the job is activated and launched immediately. As a result, the quay crane is attached by spreaders that are registers as the case stands. At the same time, the berth is just about the main memory cache, and then the marshalling yard is the main memory. Together, they constitute the scratch pad area (SPA) of CTLS. On the other side, since there are abundant calling vessels and appointment trucks for every terminal, as a matter of course, the accompanied massive collecting and distributing containers are stacked in the storage yard. So the storage yard is exactly the auxiliary memory cache, and the shipping spaces in vessels and the loading space on semitrailer are no other than the auxiliary memory. Analogously, the three construct the shared memory area (SMA) of CTLS. Based on the CTL-CSH with four tier operational architecture that is a team working analogous to register-SPA-SMA, CTLS fulfills the positioning, mapping, transferring, routing, accessing, and switching (PMTRAS) between shipping space and storage yard ultimately.
Certainly, there are some differences in memory hierarchy between CTLS and computer systems. The bottom line is that the quantity of storage types in the two is distinct. Essentially, the memory cells in computer systems only store 0 or 1, namely, a kind of content. However, the memory unit in CTLS must deal with three kinds of objects that are vessels, trucks, and containers, at least, and the former two can be regarded as the moving and temporary repository of the latter as well. The diversity leads directly to that the memory units must be classified according to service objects. As it should be, CTL-CSH mainly caters to containers. Nevertheless, it’s hard to ignore that the berth is specifically used for vessels that are the dynamic set of container delivery units.
In addition, container liner shipping follows the particular route during certain periods that contain fixed intervals and specific ports. Hence, the storage yard is nothing but the auxiliary memory cache of CTLS, for it is a temporary buffer area of collection and distribution which is merely in charge of stacking containers in a short term to accept logistics services. Under those premises, we integrate all the shipping space attached in vessels affiliated to shipping lines and the semitrailer loading space hooked on to appointment trucks into a heterogeneous unified virtual memory array (UVMA) with expandable capacity, and that is just auxiliary memory of CTLS as well. It is explicit that the UVMA is dynamic change according to the customer requirements and market circumstances, and the existence and variation of UVMA further increases the complexity of PSAME at container terminals.
Consequently, the cell positioning, address translation, unit mapping, transferring, routing, and switching among the CTL-CSH are the central tasks of CTLS. Meanwhile, the container terminal is the storage infrastructure essentially, and then CTL-CSH gives an abstract sketch map of CTLS and the fundamental execution framework of LGC-CT. In fact, the CTL-CSH is just a core component of CTL-GCA that illuminates the nature of LGC-CT in the context of container terminals.
3.4. Logistics Generalized Computational Patterns with Green Initiatives
One of the main purposes of CTL-GCA is help the CTLS to acquire the green production and sustainable development, especially for achieving equilibrium among efficiency, low-carbon, throughput, agility, flexibility, and resilience. In order to win the initiative of green production, the recognition, transfer, customizing, designing, implementation, execution, evaluation, and tuning of logistics generalized computational patterns with the conceptual framework of computational logistics, which is referred as RTCD-IEET hereinafter, is one of core tasks and central work for the further exploration and exploitation of CTL-GCA.
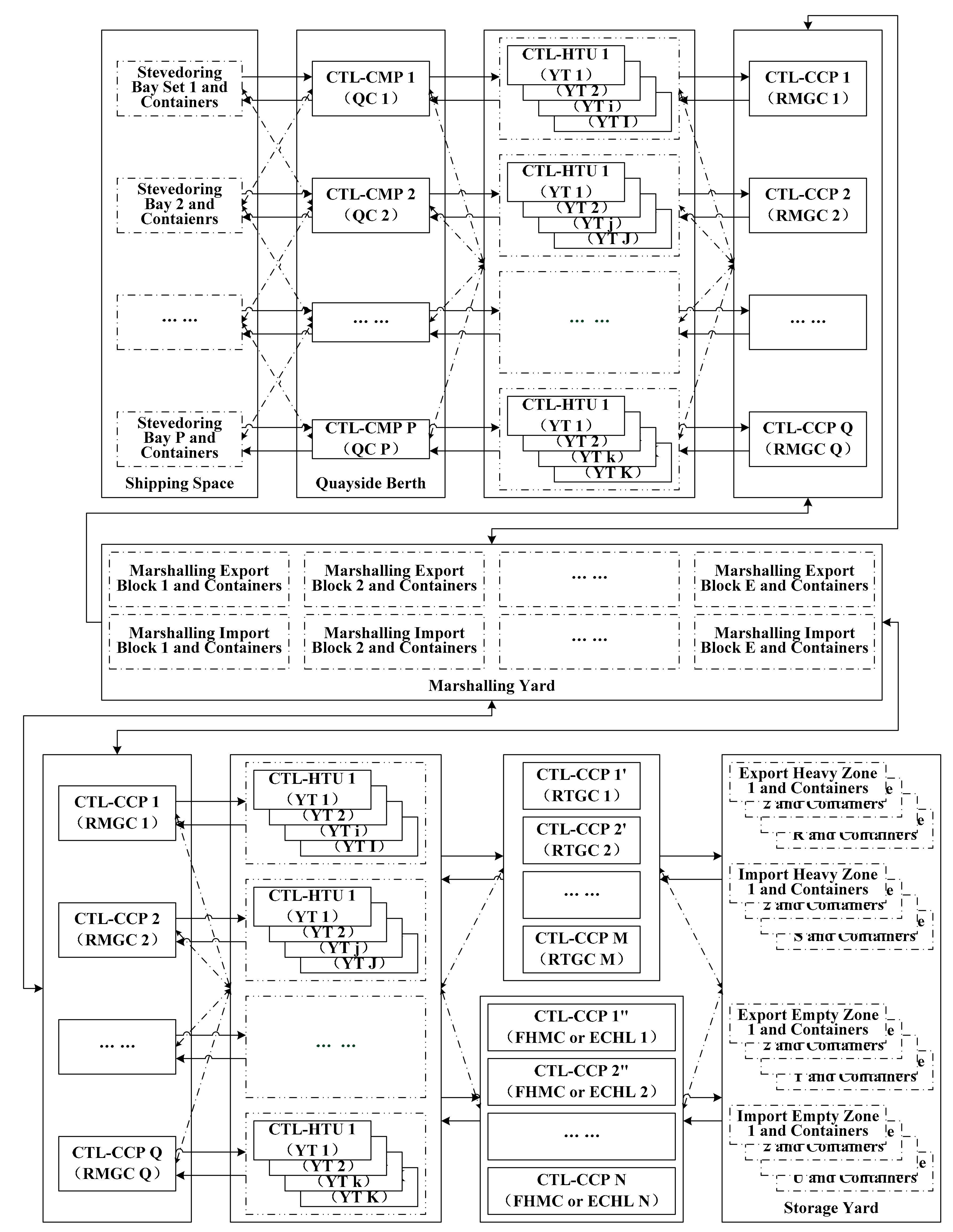
As previously mentioned, the CTL-GCA is a typical example of parallel computing architecture by the generalization, extension, and unification of computation. In the domain of computer science and engineering, the power density of chips has been a Gordian knot and a great challenge for the designing, management, and implementation of power consumption. It is also a critical component of system performance. The adoption of a parallel and heterogeneous multi-core is the current solution to the power density of chips. If the whole physical container terminal is abstracted as an LGC-CT chip, both CTL-CMP and CTL-CCP are just the processor core of CTLS. Thereupon, we take a closer look at the working of CTLS. All kinds of arrival containers are just the generalized data of CTLS, and it is the fundamental premise of RTCD-IEET discussion. For one thing, the quantity and time span of processor cores involved are the master key to strike a balance between handling capacity and power consumption, and the latter is strongly associated with carbon emission. For another, the waking, sleep, shifting, and task context switching of CTL-CMP and CTL-CCP all have a huge impact on the LGC-CT efficiency, carbon efficiency, response time, and quality of service, and it is directly related to the carbon emission as well. In addition, the PSAME level of CTL-CMP and CTL-CCP directly determines the running efficiency and turnaround time of the internal yard trailer and external container truck, and both are actuated by petroleum fuels. So the running conditions of trailers and trucks have a direct correlation with the carbon emission, too.
Overall, the combination of CTL-CMP, CTL-CCP, and CTL-HTU is remarkably similar to that of system on a chip (SoC), especially from the perspective of parallel computing architecture and data exchange mechanism. The PHR-LGC-FPS is nothing else than the container flow superscalar hybrid flow shop (CFS-HFS) because that CTL-CMP can load and discharge four 20-foot equivalent units (TEU) simultaneously in one cycle, even six TEUs at one time, which is identical to the definition of a superscalar processor. The overall performance and power consumption of multi-core and multi-processor SoC have always been highly correlated with data parallelism and code regularity, especially for the linear speed-up by injecting more LGC-CT resources.
Given the PMTRAS conditions at container terminals, the data parallelism and code regularity are extremely limited whether in theory or in practice. The former refers to the possibility of LGC-CT for multiple containers on a container ship simultaneously. Due to the liner stowage and the period of collection and distribution, the data parallelism of LGC-CT must be low. Because of the high uncertainty, dynamics, randomization, and low data parallelism, the code regularity in CFS-HFS is very scarce, which is just about allocation and scheduling instructions of CTL-CMP, CTL-CCP, and CTL-HTU. All indicate that the RTCD-IEET based CTL-GCA is very necessary and promising with the green initiative. Now, we launch the case study to demonstrate the application and exploration of CTL-GCA and related logistics generalized computational patterns.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}