Development of an Electrohydraulic Variable Buoyancy System




Abstract
:1. Introduction
2. Modular Portable AUVs
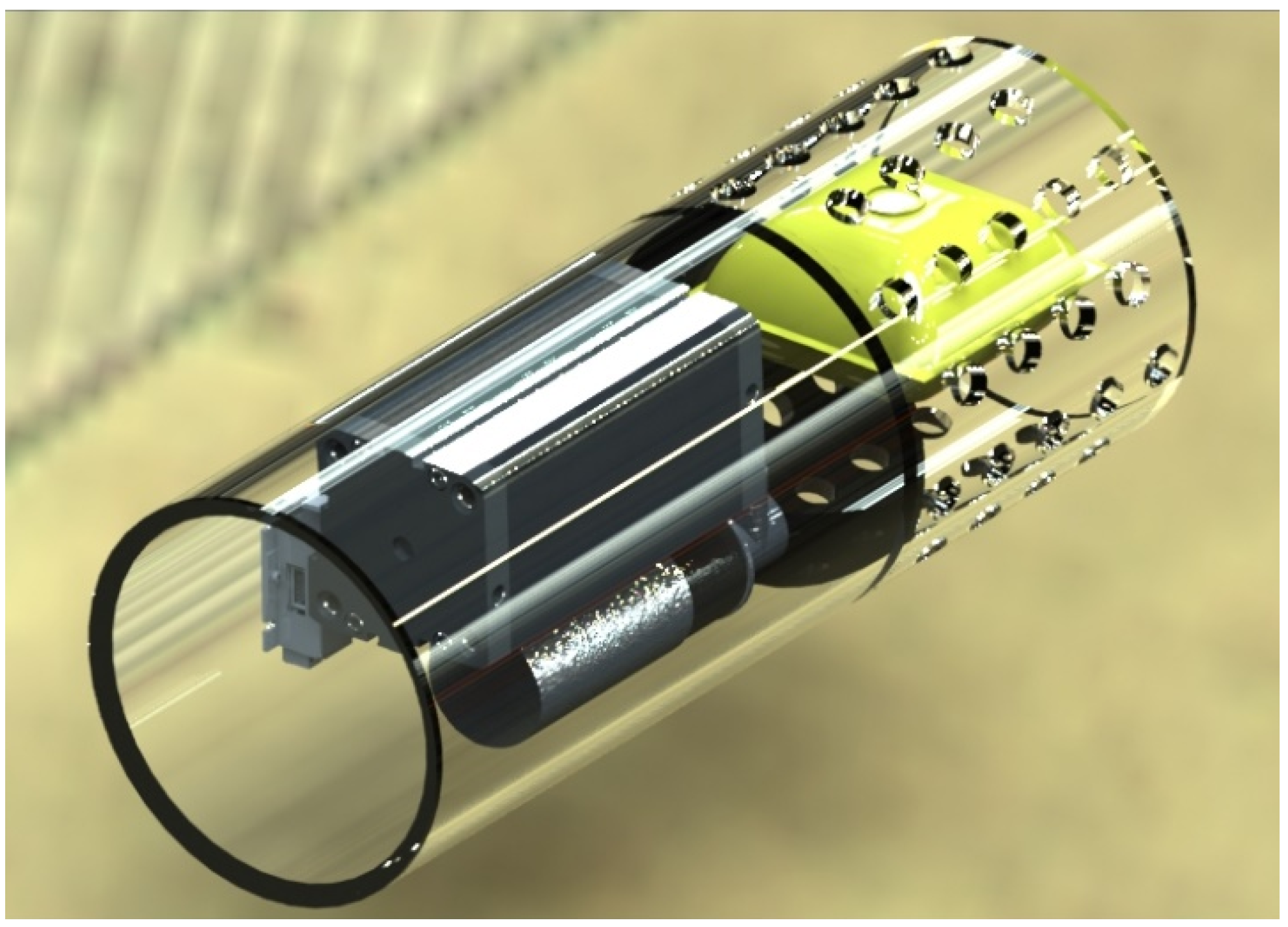
3. Mechanical Design of the VBS
- A total volume change of Dt = ±700 cm3 must be provided to achieve a full buoyancy change, starting from a neutral state, in the face of water density variations with depth and salinity;
- Two VBS modules, one at the stern and one at the bow, must be incorporated in the AUV so as to control pitch and depth independently;
- The VBS’s dry components should fit inside a cylinder with as little length as possible and be under 180 mm in diameter;
- The section of the vehicle containing the VBS should be as close to null buoyancy as possible when in its neutral state;
- Considering the Slocum G2 glider’s ability to deliver 43 cm3/s at no load conditions for the 100 m rated pump [8], a maximum time of tvbs = 15 s was defined for the VBS to perform a full buoyancy change;
- The VBS’s required power should not exceed the power provided by the AUV’s internal power system;
- It should be underlined that the solution was designed with off-the-shelf components, in order to be readily available for assembly.
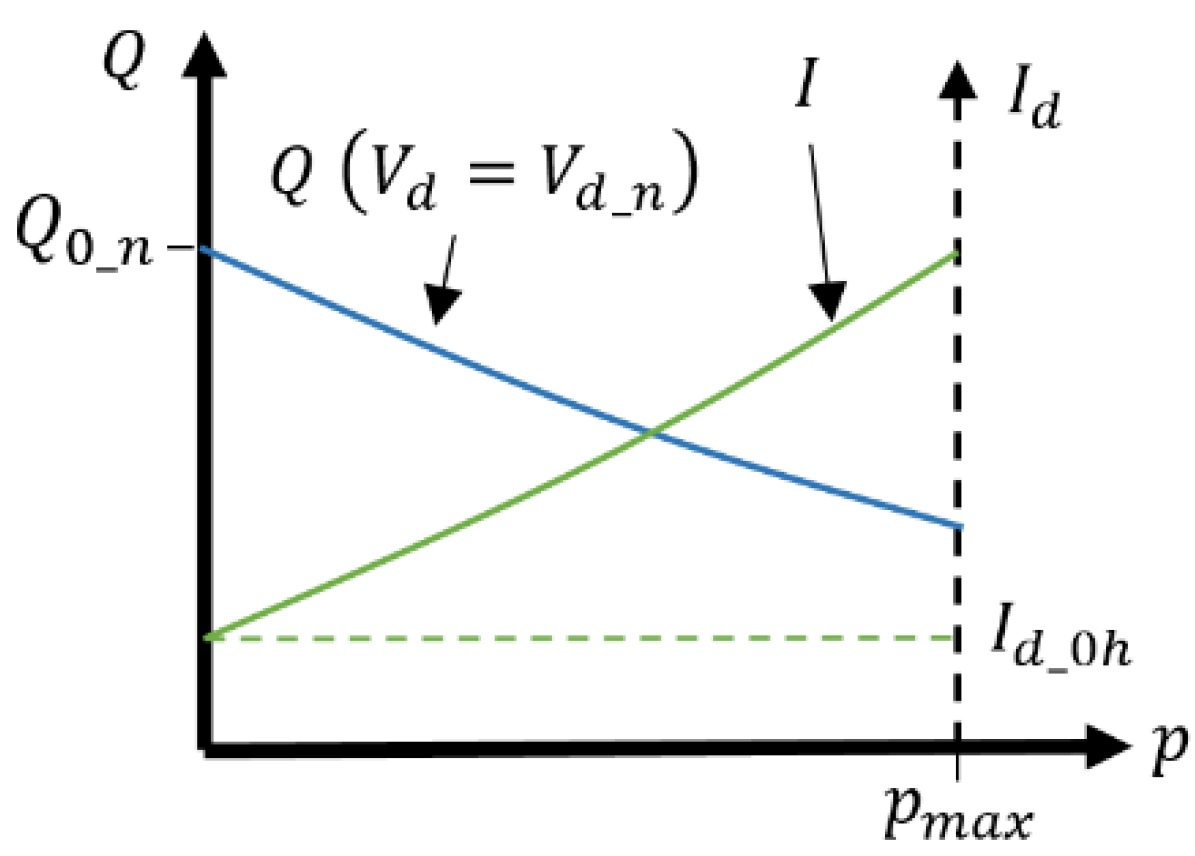
4. Power Calculation of the Electrohydraulic VBS
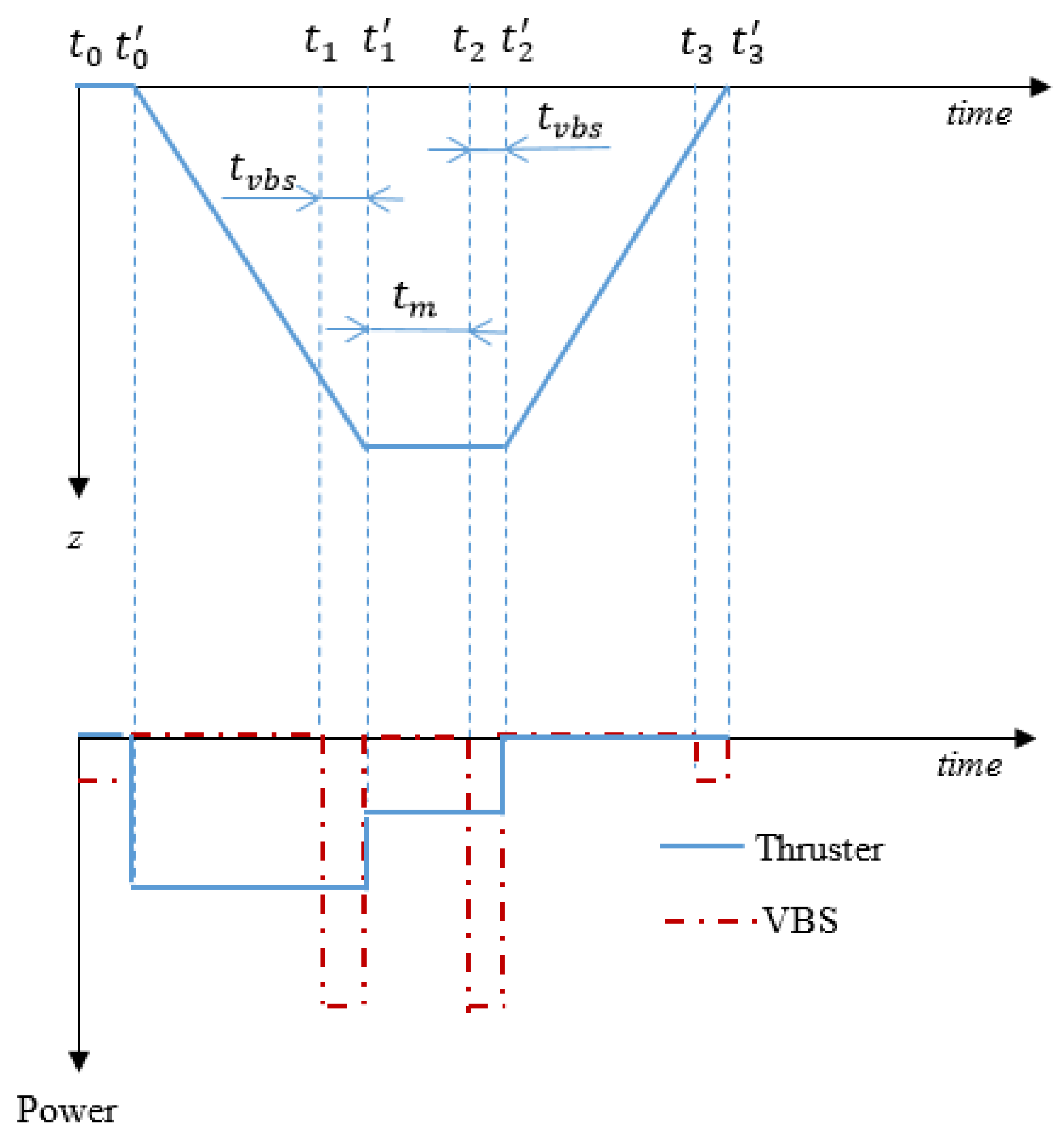
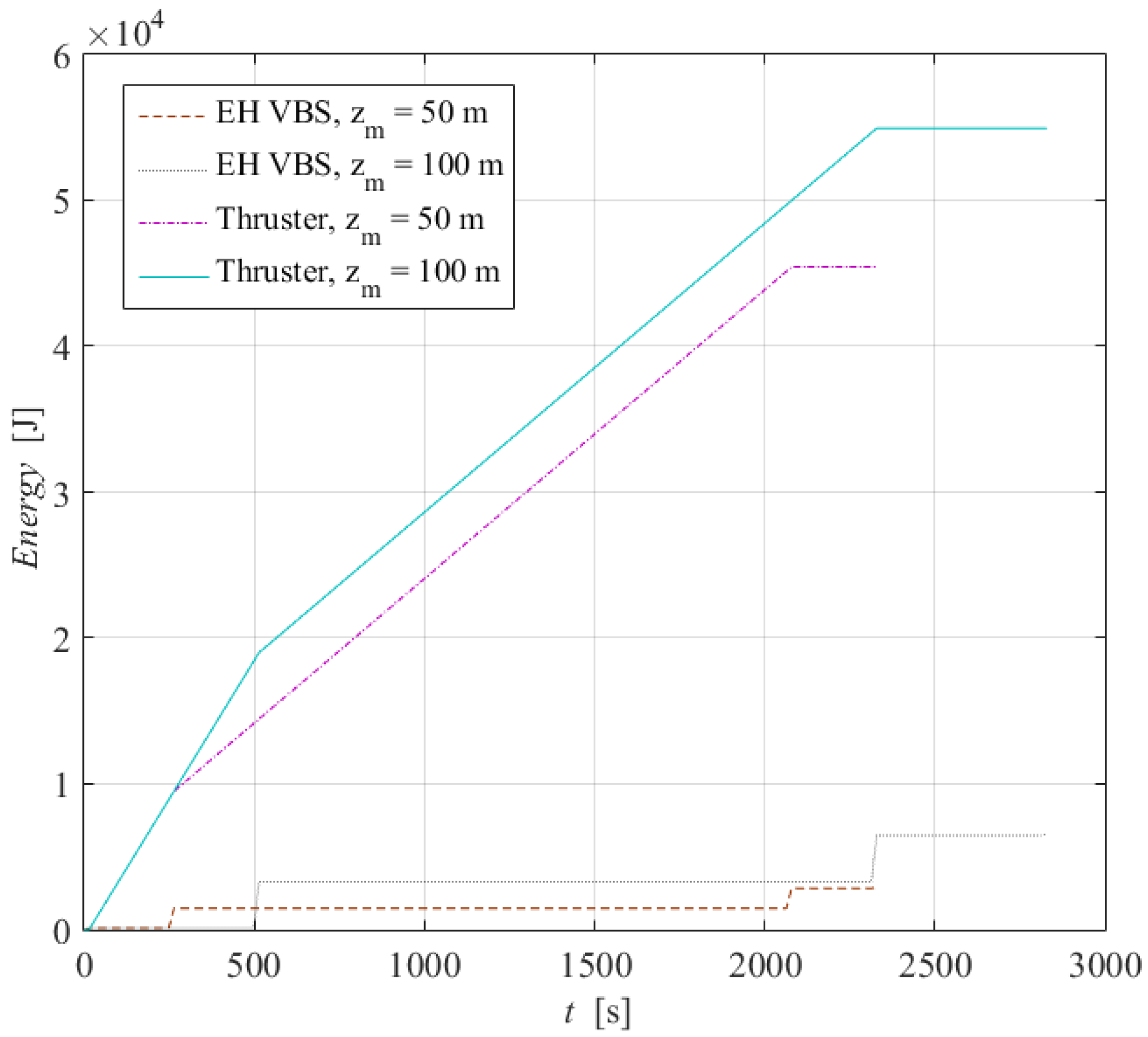
5. Simulation
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Davis, R.E.; Eriksen, C.C.; Jones, C.P. Autonomous buoyancy-driven underwater gliders. In Technology and Applications of Autonomous Underwater Vehicles; Griffiths, G., Ed.; CRC Press: Boca Raton, FL, USA, 2002; pp. 37–58. [Google Scholar]
- Ranganathan, T.; Thondiyath, A. Design and Analysis of Cascaded Variable Buoyancy Systems for Selective Underwater Deployment. In Proceedings of the 13th International Conference on Informatics in Control, Automation and Robotics 2016, Lisbon, Portugal, 29–31 July 2016. [Google Scholar]
- Masmitjà, I.; González, J.; Gomáriz, S. Buoyancy model for Guanay II AUV. In Proceedings of the OCEANS 2014—TAIPEI, Taipei, Taiwan, 7–10 April 2014. [Google Scholar]
- Asakawa, K.; Hyakudome, T.; Ishihara, Y.; Nakamura, M. Development of an underwater glider for virtual mooring and its buoyancy engine. In Proceedings of the 2015 IEEE Underwater Technology (UT), Chennai, India, 23–25 February 2015; pp. 1–6. [Google Scholar]
- Kobayashi, T.; Watanabe, K.; Ino, T.; Amaike, K.; Tachikawa, H.; Shikama, N.; Mizuno, K. New Buoyancy Engine for Autonomous Vehicles Observing Deeper Oceans. In Proceedings of the Twentieth (2010) International Offshore and Polar Engineering Conference, Beijing, China, 20–25 June 2010; pp. 401–405. [Google Scholar]
- Woithe, H.; Chigirev, I.; Aragon, D.; Iqbal, M.; Shames, Y.; Glenn, S.; Schofield, O.; Seskar, I.; Kremer, U. Slocum Glider Energy Measurement and Simulation Infrastructure. In Proceedings of the Oceans 2010, Sydney, Australia, 24–27 May 2010; pp. 1–8. [Google Scholar]
- Falcão Carneiro, J.; Pinto, J.B.; Cruz, N.A.; Gomes de Almeida, F. Using a variable buoyancy system for energy savings in an AUV. In Proceedings of the 2019 5th Experiment International Conference (exp.at’19), Funchal, Portugal, 12–14 June 2019. [Google Scholar]
- Research, T.W. Slocum G2 Glider Operators Manual; P/N 4343, Rev. B; Teledyne Webb Research: North Falmouth, MA, USA, 2012. [Google Scholar]
- Nuchkrua, T.; Leephakpreeda, T. Fuzzy Self-Tuning PID Control of Hydrogen-Driven Pneumatic Artificial Muscle Actuator. J. Bionic Eng. 2013, 10, 329–340. [Google Scholar] [CrossRef]
- Li, K.; Nuchkrua, T.; Zhao, H.; Yuan, Y.; Boonto, S. Learning-based Adaptive Robust Control of Manipulated Pneumatic Artificial Muscle Driven by H2-Based Metal Hydride. In Proceedings of the 2018 IEEE 14th International Conference on Automation Science and Engineering (CASE), Munich, Germany, 20–24 August 2018; pp. 1284–1289. [Google Scholar]
- Fortuna, L.; Muscato, G. A roll stabilization system for a monohull ship: Modeling, identification, and adaptive control. IEEE Trans. Control Syst. Technol. 1996, 4, 18–28. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Characteristic | Value |
|---|---|
| First Operation | 2007 |
| Depth Rating | 100 m |
| Energy | 600 Wh, Li-ion |
| Endurance | 10 h or ~50 km |
| Length | 1.7 m |
| Dry Mass | 35 kg |
| Diameter | 20 cm |
| Maximum Width | 30 cm |
| Default Propulsion | Two horizontal, two vertical |
| Parameter | Value |
|---|---|
| [V] | 1 |
| [V] | 24 |
| [A] | 0.327 |
| [V] | 0.618 |
| [APa−1] () | 4.624 |
| [m3s−1Pa−1] () | −1.771 |
| [m3s−1] () | 4.856 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Falcão Carneiro, J.; Pinto, J.B.; Cruz, N.A.; Gomes de Almeida, F. Development of an Electrohydraulic Variable Buoyancy System. Information 2019, 10, 396. https://doi.org/10.3390/info10120396
Falcão Carneiro J, Pinto JB, Cruz NA, Gomes de Almeida F. Development of an Electrohydraulic Variable Buoyancy System. Information. 2019; 10(12):396. https://doi.org/10.3390/info10120396
Chicago/Turabian StyleFalcão Carneiro, João, João Bravo Pinto, Nuno A. Cruz, and Fernando Gomes de Almeida. 2019. "Development of an Electrohydraulic Variable Buoyancy System" Information 10, no. 12: 396. https://doi.org/10.3390/info10120396
APA StyleFalcão Carneiro, J., Pinto, J. B., Cruz, N. A., & Gomes de Almeida, F. (2019). Development of an Electrohydraulic Variable Buoyancy System. Information, 10(12), 396. https://doi.org/10.3390/info10120396