Smart Traffic Lights over Vehicular Named Data Networking


Abstract
:1. Introduction
- CS caches the forwarded data through the router.
- PIT records the unsatisfied interests received by the router.
- FIB stores information about the interfaces that could satisfy the interest packets.
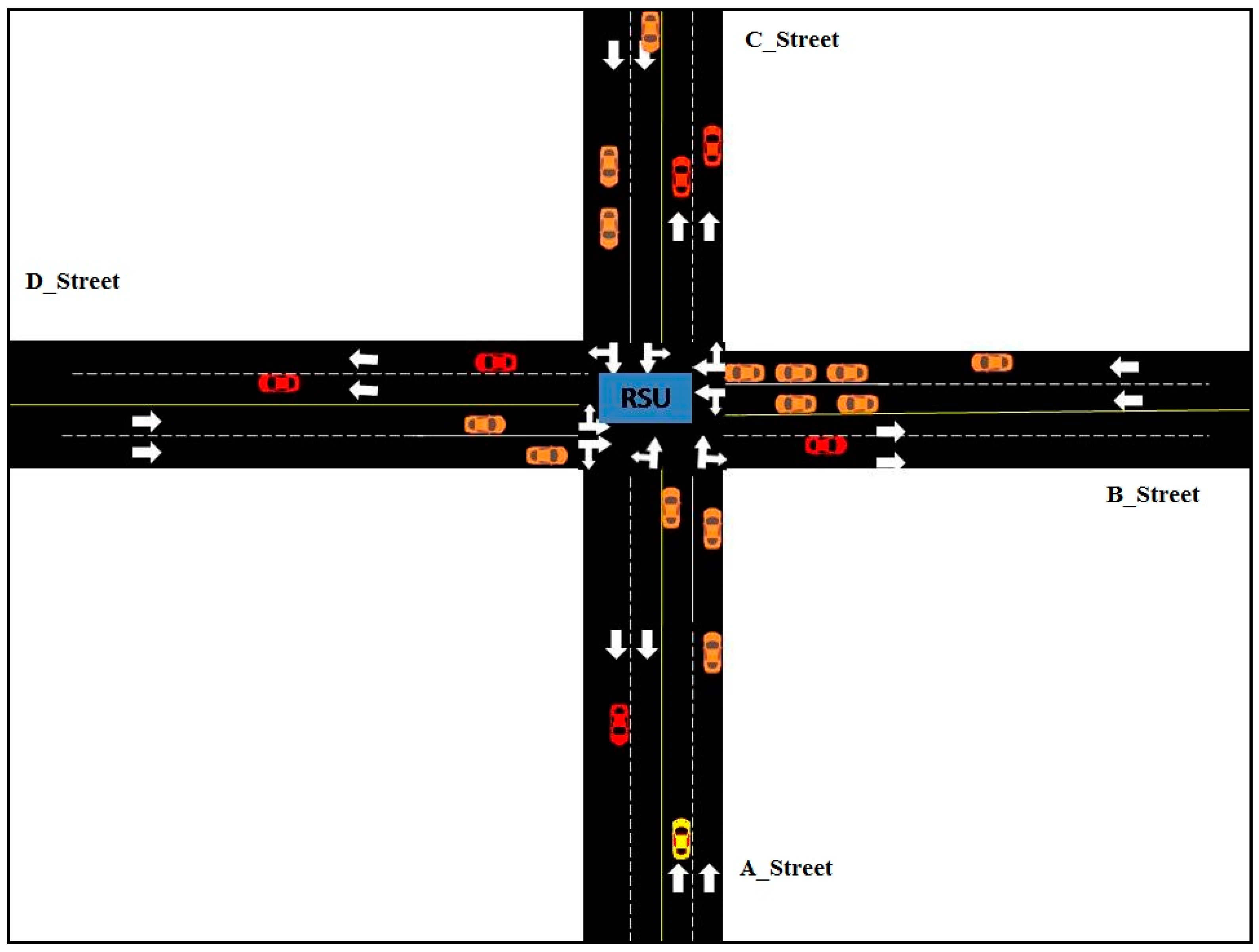
- Real-time control: Controlling intersections according to road status is a real-time issue in our design. Transportation status information is collected and disseminated by the RSUs installed on the intersections. In addition, the information in any RSU is provided to other RSUs and drivers to spread awareness to the entire network regarding the traffic conditions or any traffic congestion at every point along the way.
- Low-traffic conditions: We can apply our system for low-traffic conditions during early morning or midnight at urban centers. This system allows drivers to move without stopping at intersections if no vehicle is crossing.
- Emergency vehicles: This system ensures priority for emergency vehicles by routing them within the direction to indicate its upcoming destination.
- Autonomous vehicles: Autonomous vehicles do not require capturing and processing images of light status continuously. RSU sends the vehicles either pass signal (green) or wait signal (red) only.
- Low vision: This method is a probable solution for the degradation in vision caused by snowing or fogging. The technique is also an appropriate alternative for the image processing methods used in various solutions.
- Power consumption: The traditional traffic system is controlled by fixed time. However, traffic lights continue to work even when intersections are empty. This traffic system consumes considerable energy, and the implementation of our system will alleviate such consumption.
- To the best of our knowledge, our work is the first to present smart traffic light application over vehicular named data networking.
- We present a smart traffic light system in which the vehicle waiting time in intersections varies according to street capacity. In addition, a digital signal is sent to every vehicle at the intersection instead of emitting a light signal.
2. Related Works
2.1. Smart Traffic Light System
2.2. Virtual Traffic Light System
2.3. Vehicular Named Data Networking
3. Proposed System
3.1. Overview of VANET over NDN
3.2. Proposed System Architecture
3.3. Forwarding Strategy
3.4. Traffic Management Algorithm
| Pseudo-Code of Traffic Management for One Phase |
| Input: S table contains four types of streets vehicles interests A, B, C, and D. Output: “Pass” or “Wait” message. 1. While S is not empty repeat. 2. Start the phase. 3. Calculate , and and put them in a descending order. 4. Calculate the assigned time , for each street. 5. For = 1:4 do 6. = max , , } 7. For all vehicles 8. Send “Pass” data packet to all vehicles of the largest 9. Send “Wait” data packet to all other vehicles. 10. If vehicle passed 11. Add data packet to CS 12. Delete interest packet from S table 13. else 14. Add interest packet to the next phase S table. 15. End if. 16. Delete all satisfied interests in from S table. 17. End For. 18. End For. 19. End the phase. 20. Update S with new incoming and old interests. 21. End while. |
4. Experimental Results
4.1. Simulation Environment
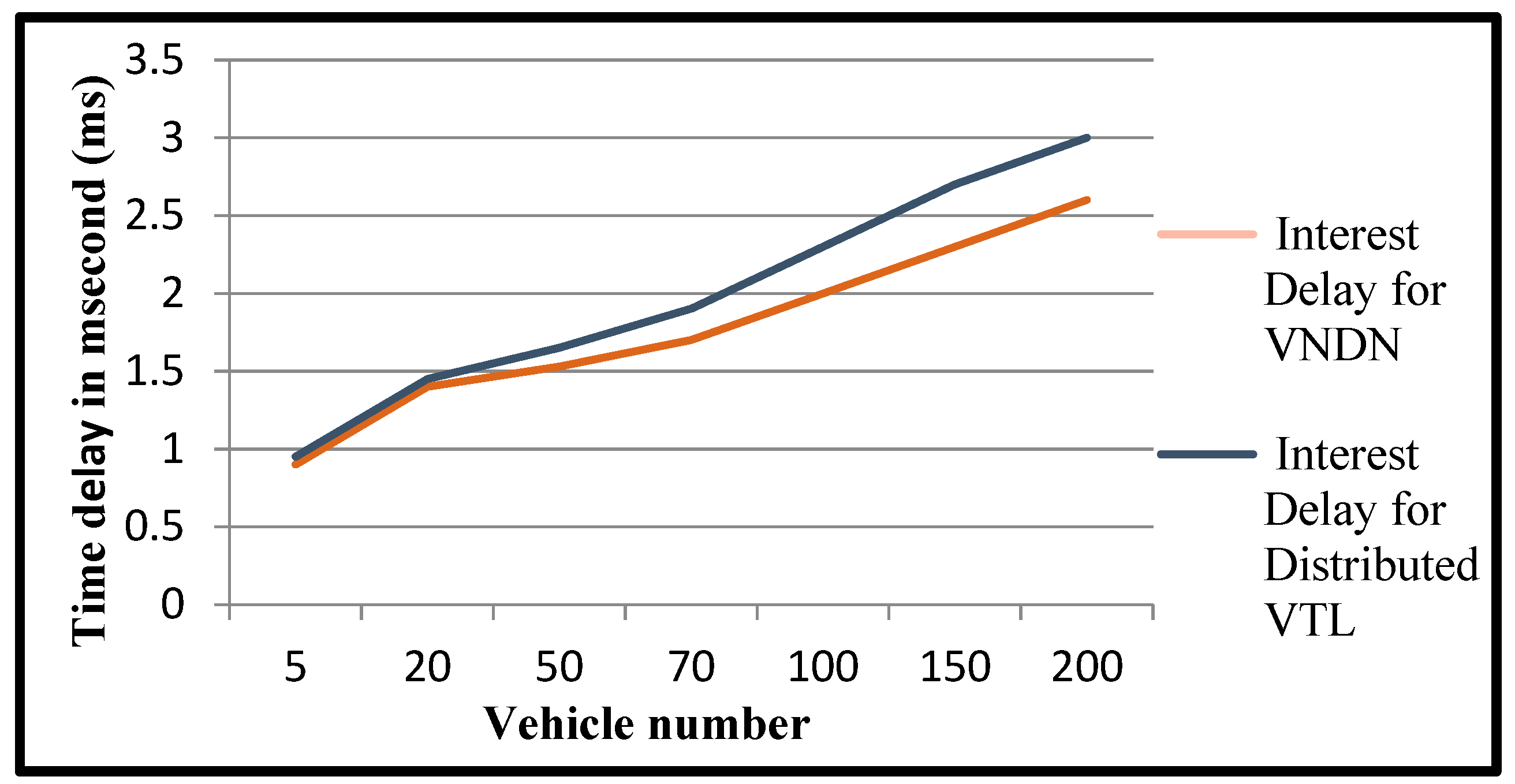
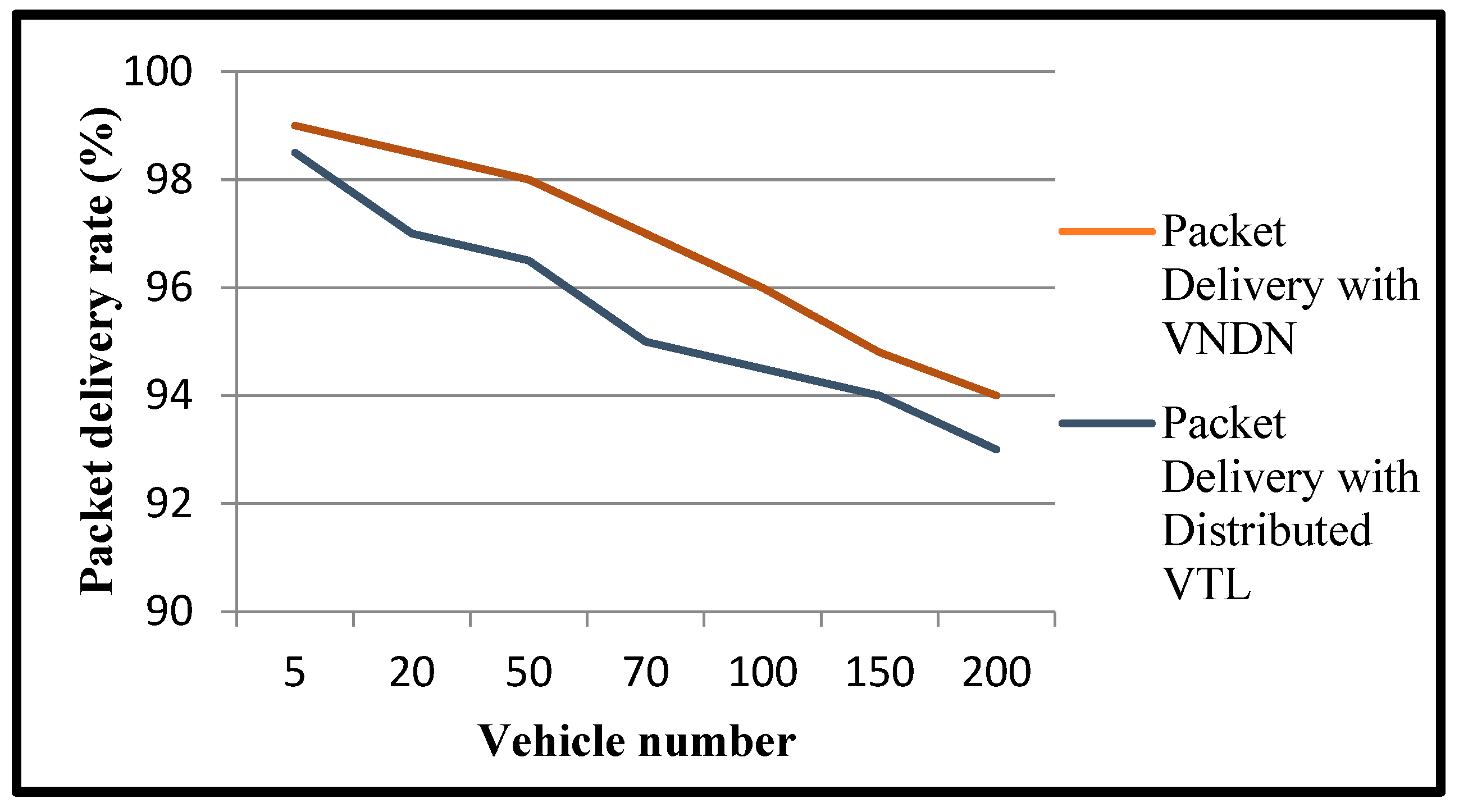
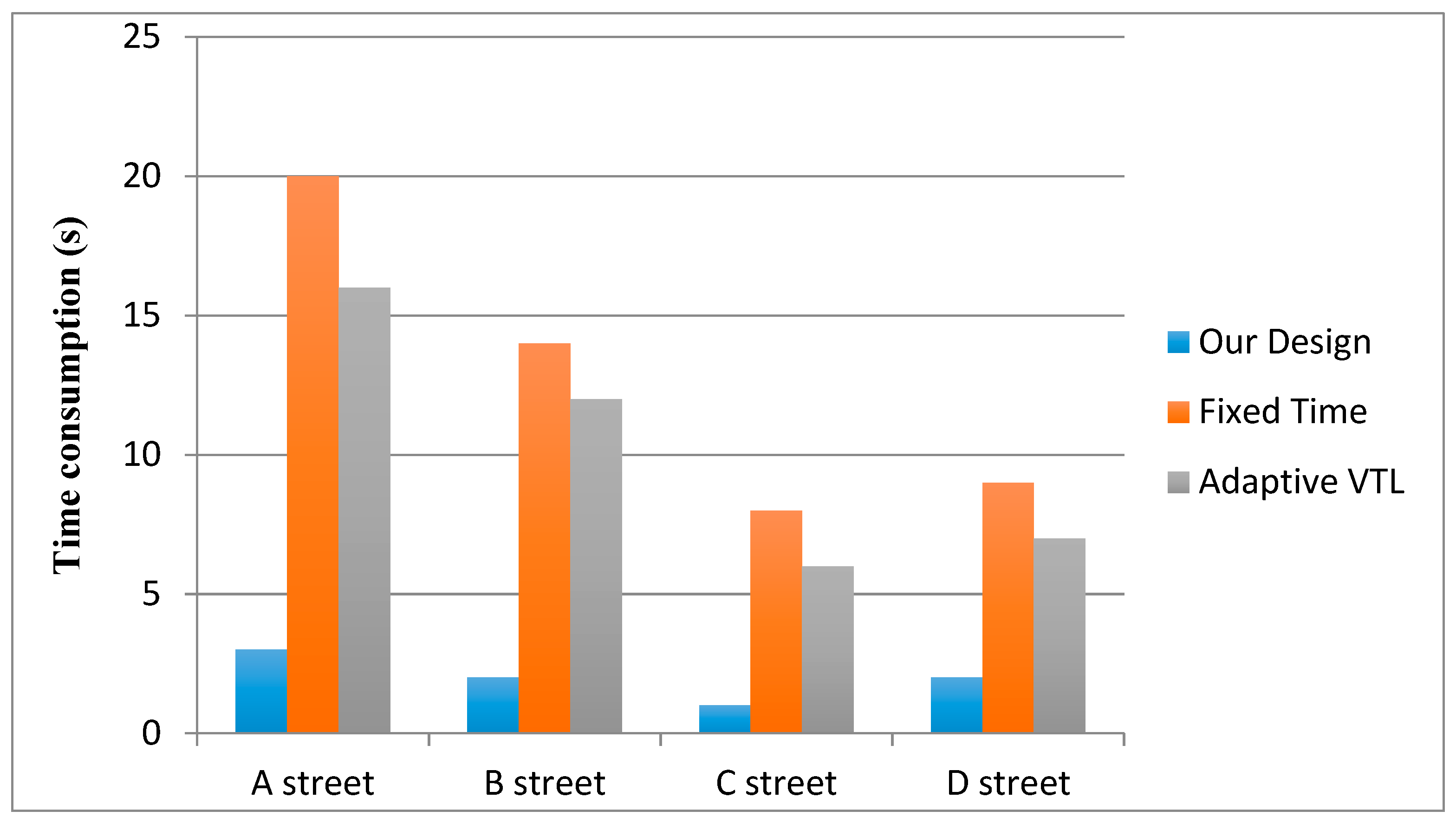
4.2. Results and Discussion
- Packet delivery rate: the number of packets that are exchanged between vehicles and the RSU to all interest and data packets forwarded by the RSU and vehicles;
- Packet delay time: the time between sending the interest packet by the vehicle and receiving the data packet from the RSU;
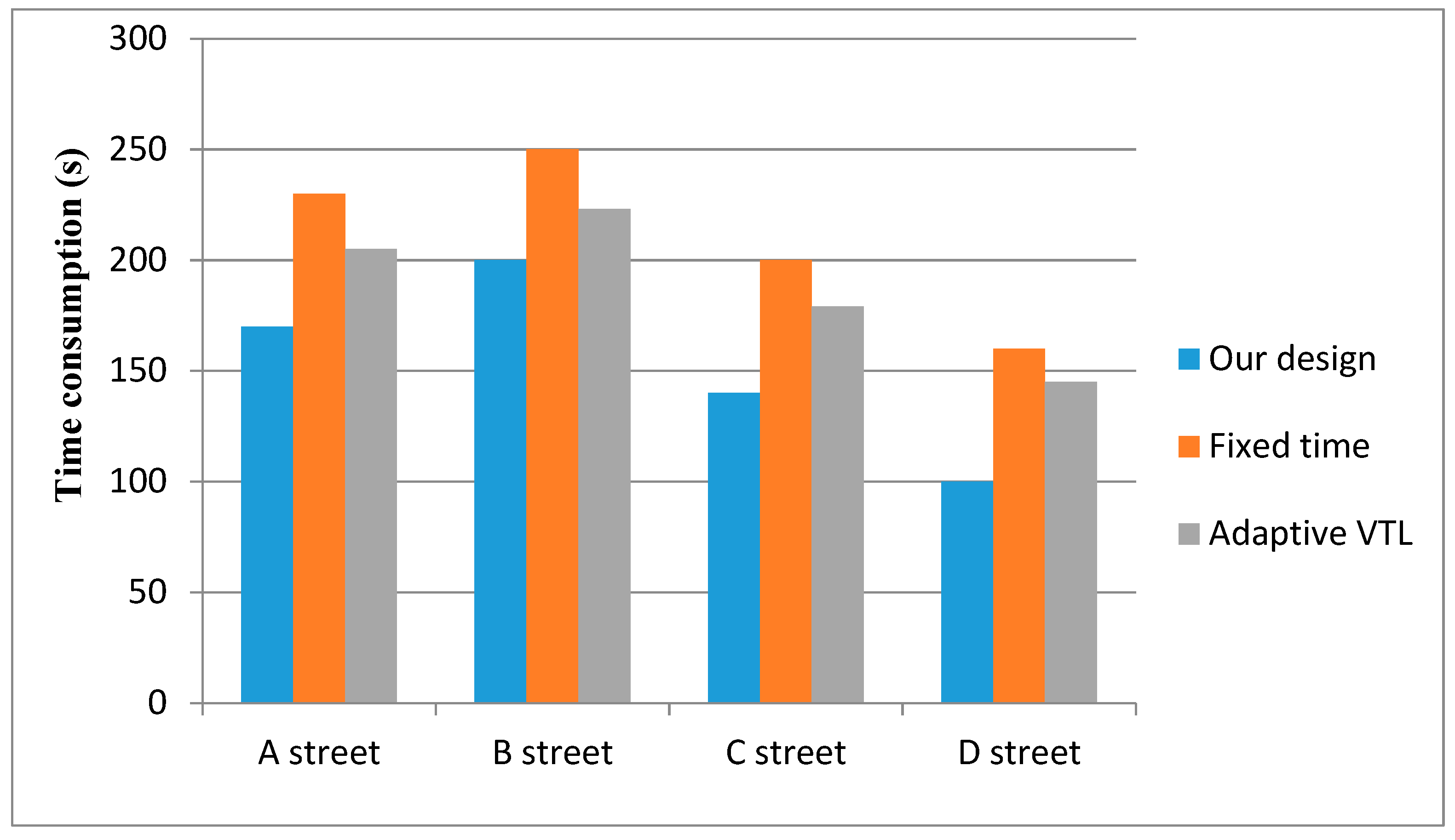
- Total consumption time: the total time for all vehicles waiting for the green signal at the intersection.
5. Conclusions and Future Work
5.1. Conclusions
5.2. Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Kwatirayo, S.; Almhana, J.; Liu, Z. Adaptive traffic light control using VANET: A case study. In Proceedings of the Wireless Communications and Mobile Computing Conference (IWCMC), Sardinia, Italy, 1–5 July 2013; pp. 752–757. [Google Scholar]
- Bouk, S.H.; Ahmed, S.H.; Kim, D. Vehicular content centric network (VCCN): A survey and research challenges. In Proceedings of the 30th Annual ACM Symposium on Applied Computing, Salamanca, Spain, 13–17 April 2015; ACM: Salamanca, Spain, 2015; pp. 695–700. [Google Scholar]
- Bouk, S.H.; Ahmed, S.H.; Kim, D.; Song, H. Named-data-networking-based ITS for smart cities. IEEE Commun. Mag. 2017, 55, 105–111. [Google Scholar] [CrossRef]
- Kaiwartya, O.; Kumar, S.; Kasana, R. Traffic light based time stable geocast (T-TSG) routing for urban VANETs. In Proceedings of the IEEE 2013 Sixth International Conference on Contemporary Computing (IC3), New Delhi, India, 8–10 August 2013; pp. 113–117. [Google Scholar]
- Ahmed, S.H.; Yaqub, M.A.; Bouk, S.H.; Kim, D. SmartCop: Enabling smart traffic violations ticketing in vehicular named data networks. Mobile Inf. Syst. 2016, 2016, 1353290. [Google Scholar] [CrossRef]
- Bian, C.; Zhao, T.; Li, X.; Yan, W. Boosting named data networking for data dissemination in urban VANET scenarios. Vehicular Commun. 2015, 2, 195–207. [Google Scholar] [CrossRef]
- Wang, L.; Wakikawa, R.; Kuntz, R.; Vuyyuru, R.; Zhang, L. Data naming in vehicle-to-vehicle communications. In Proceedings of the 2012 IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Orlando, FL, USA, 25–30 March 2012; pp. 328–333. [Google Scholar]
- Wang, L.; Afanasyev, A.; Kuntz, R.; Vuyyuru, R.; Wakikawa, R.; Zhang, L. Rapid traffic information dissemination using named data. In Proceedings of the 1st ACM Workshop on Emerging Name-Oriented Mobile Networking Design-Architecture, Algorithms, and Applications, Hilton Head, SC, USA, 11 June 2012; pp. 7–12. [Google Scholar]
- Amadeo, M.; Campolo, C.; Molinaro, A. Enhancing content-centric networking for vehicular environments. Comput. Netw. 2013, 57, 3222–3234. [Google Scholar] [CrossRef]
- Grassi, G.; Pesavento, D.; Pau, G.; Vuyyuru, R.; Wakikawa, R.; Zhang, L. VANET via named data networking. In Proceedings of the 2014 IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Toronto, ON, Canada, 27 April–12 May 2014; pp. 410–415. [Google Scholar]
- Chen, M.; Mau, D.O.; Zhang, Y.; Taleb, T.; Leung, V.C. Vendnet: Vehicular named data network. Veh. Commun. 2014, 1, 208–213. [Google Scholar] [CrossRef]
- Faye, S.; Chaudet, C. Characterizing the topology of an urban wireless sensor network for road traffic management. IEEE Trans. Vehicular Tech. 2016, 65, 5720–5725. [Google Scholar] [CrossRef]
- Cruz-Piris, L.; Rivera, D.; Fernandez, S.; Marsa-Maestre, I. Optimized Sensor Network and Multi-Agent Decision Support for Smart Traffic Light Management. Sensors 2018, 18, 435. [Google Scholar] [CrossRef] [PubMed]
- Fernandez, S.; Hadfi, R.; Ito, T.; Marsa-Maestre, I.; Velasco, J.R. Ontology-based architecture for intelligent transportation systems using a traffic sensor network. Sensors 2016, 16, 1287. [Google Scholar] [CrossRef] [PubMed]
- Yu, D.I.N.G.; Liu, Y.Z.; Gong, X.Y.; Wang, W.D. Road traffic and geography topology based opportunistic routing for VANETs. J. China Univ. Posts Telecommun. 2014, 21, 32–39. [Google Scholar]
- De Charette, R.; Nashashibi, F. Traffic light recognition using image processing compared to learning processes. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2009), St. Louis, MO, USA, 11–15 October 2009; pp. 333–338. [Google Scholar]
- Premachandra, H.C.N.; Yendo, T.; Tehrani, M.P.; Yamazato, T.; Okada, H.; Fujii, T.; Tanimoto, M. High-speed-camera image processing based LED traffic light detection for road-to-vehicle visible light communication. In Proceedings of the 2010 IEEE Intelligent Vehicles Symposium (IV), San Diego, CA, USA, 21–24 June 2010; pp. 793–798. [Google Scholar]
- Zhou, B.; Cao, J.; Zeng, X.; Wu, H. Adaptive traffic light control in wireless sensor network-based intelligent transportation system. In Proceedings of the 2010 IEEE Vehicular Technology Conference Fall (VTC 2010-Fall), Ottawa, ON, Canada, 6–9 September, 2010; pp. 1–5. [Google Scholar]
- Al-Nasser, F.A.; Rowaihy, H. Simulation of dynamic traffic control system based on wireless sensor network. In Proceedings of the 2011 IEEE Symposium on Computers & Informatics (ISCI), Kuala Lumpur, Malaysia, 20–23 March 2011; pp. 40–45. [Google Scholar]
- Shahsavari Pour, N.; Asadi, H.; Pour Kheradmand, M. Fuzzy multi objective traffic light signal optimization. J. Appl. Math. 2013, 2013, 249726. [Google Scholar] [CrossRef]
- Gokulan, B.P.; Srinivasan, D. Distributed geometric fuzzy multi-agent urban traffic signal control. IEEE Trans. Intell. Transport. Syst. 2010, 11, 714–727. [Google Scholar] [CrossRef]
- Qiao, J.; Yang, N.; Gao, J. Two-stage fuzzy logic controller for signalized intersection. IEEE Trans. Syst. Man Cybern. Syst. Hum. 2011, 41, 178–184. [Google Scholar] [CrossRef]
- Jin, J.; Ma, X.; Kosonen, I. An intelligent control system for traffic lights with simulation-based evaluation. Control Engin. Pract. 2017, 58, 24–33. [Google Scholar] [CrossRef] [Green Version]
- Ferreira, M.; Fernandes, R.; Conceição, H.; Viriyasitavat, W.; Tonguz, O.K. Self-organized traffic control. In Proceedings of the ACM International Workshop on Vehicular Internetworking, Chicago, IL, USA, 24 September 2010. [Google Scholar]
- Viriyasitavat, W.; Roldan, J.M.; Tonguz, O.K. Accelerating the adoption of Virtual Traffic Lights through policy decisions. In Proceedings of the IEEE International Conference on Connected Vehicles & Expo, Las Vegas, NV, USA, 2–6 December 2013. [Google Scholar]
- Chou, L.D.; Tseng, J.H.; Yang, J.Y. Adaptive virtual traffic light based on vanets for mitigating congestion in smart city. In Proceedings of the Third International Conference on Digital Information and Communication Technology and Its Applications (DICTAP), Ostrava, Czech Republic, 8–10 July 2013; pp. 40–44. [Google Scholar]
- Münst, W.; Dannheim, C.; Mäder, M.; Gay, N.; Malnar, B.; Al-Mamun, M.; Icking, C. Virtual traffic lights: IEEE Managing intersections in the cloud. In Proceedings of the International Workshop on Reliable Networks Design & Modeling, Munich, Germany, 5–10 October 2015. [Google Scholar]
- Yapp, J.; Kornecki, A.J. Safety analysis of Virtual Traffic Lights. In Proceedings of the IEEE International Conference on Methods & Models in Automation & Robotics, Miedzyzdroje, Poland, 24–27 August 2015. [Google Scholar]
- Bazzi, A.; Zanella, A.; Masini, B.M. A distributed virtual traffic light algorithm exploiting short range V2V communications. Ad Hoc Netw. 2016, 49, 42–57. [Google Scholar] [CrossRef]
- Available online: http://ndnsim.net/current/ (accessed on 10 October 2018).
- Available online: https://www.nsnam.org/ (accessed on 12 October 2018).








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 5 s | 10 s | 15 s | 20 s | 30 s | 40 s | 60 s | >90 s | Vehicle Number | Weight(s) | |
|---|---|---|---|---|---|---|---|---|---|---|
| A | 2 | 4 | 2 | 2 | 4 | 5 | 2 | 0 | 21 | 560 |
| B | 3 | 2 | 5 | 3 | 2 | 1 | 1 | 0 | 17 | 330 |
| C | 5 | 3 | 2 | 1 | 2 | 3 | 2 | 1 | 19 | 495 |
| D | 1 | 2 | 4 | 5 | 2 | 6 | 2 | 0 | 22 | 605 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Al-qutwani, M.; Wang, X. Smart Traffic Lights over Vehicular Named Data Networking. Information 2019, 10, 83. https://doi.org/10.3390/info10030083
Al-qutwani M, Wang X. Smart Traffic Lights over Vehicular Named Data Networking. Information. 2019; 10(3):83. https://doi.org/10.3390/info10030083
Chicago/Turabian StyleAl-qutwani, Majed, and Xingwei Wang. 2019. "Smart Traffic Lights over Vehicular Named Data Networking" Information 10, no. 3: 83. https://doi.org/10.3390/info10030083
APA StyleAl-qutwani, M., & Wang, X. (2019). Smart Traffic Lights over Vehicular Named Data Networking. Information, 10(3), 83. https://doi.org/10.3390/info10030083