An Improved Jacobi-Based Detector for Massive MIMO Systems


Abstract
:1. Introduction
2. System Model
2.1. System Model
2.2. MMSE Detector
2.3. Conventional Jacobi Algorithm
3. Proposed Algorithm for MIMO Detection
3.1. Improved Jacobi Algorithm
| Algorithm 1: Proposed Improved Jacobi Iterative Algorithm |
| Step 1) Compute the initial approximate solution of the transmitted signal , mark it as . |
| Step 2) (if ) Compute approximate solutions of using Equation (7), mark as |
| , to obtain enough mutual solution which are required by the |
| whole-correction method. |
| For |
| Use SD-Jacobi iteration to obtain ; |
| End for |
| Step 3) Employe the whole-correction method to update the approximate solution. |
| For |
| Use SD-Jacobi iteration to obtain ; |
| Obtain the updated by ; |
| End for |
3.2. Parameter Selection
3.3. Convergence Proof
| Algorithm 2: Proposed improved Jacobi-based algorithm with m = 2 |
| Input: (1) , channel matrix |
| (2) , received signal matrix |
| (3) K, number of iterations |
| Output: detected signal |
| // Initialization |
| 1: ; |
| 2: ; |
| 3: ; |
| // Iterative Process(repeat K times) |
| 4: for to K (iteration times) do |
| 5: if k = 1; the value of is obtained in the initialization |
| 6: else;, the value of is obtained in the previous iteration |
| 7: end if |
| 8: ; |
| 9: ; |
| 10: ; |
| 11: ; |
| 12: ; |
| 13: ; |
| 14: ; |
| 15: end for |
3.4. Computational Complexity Analysis
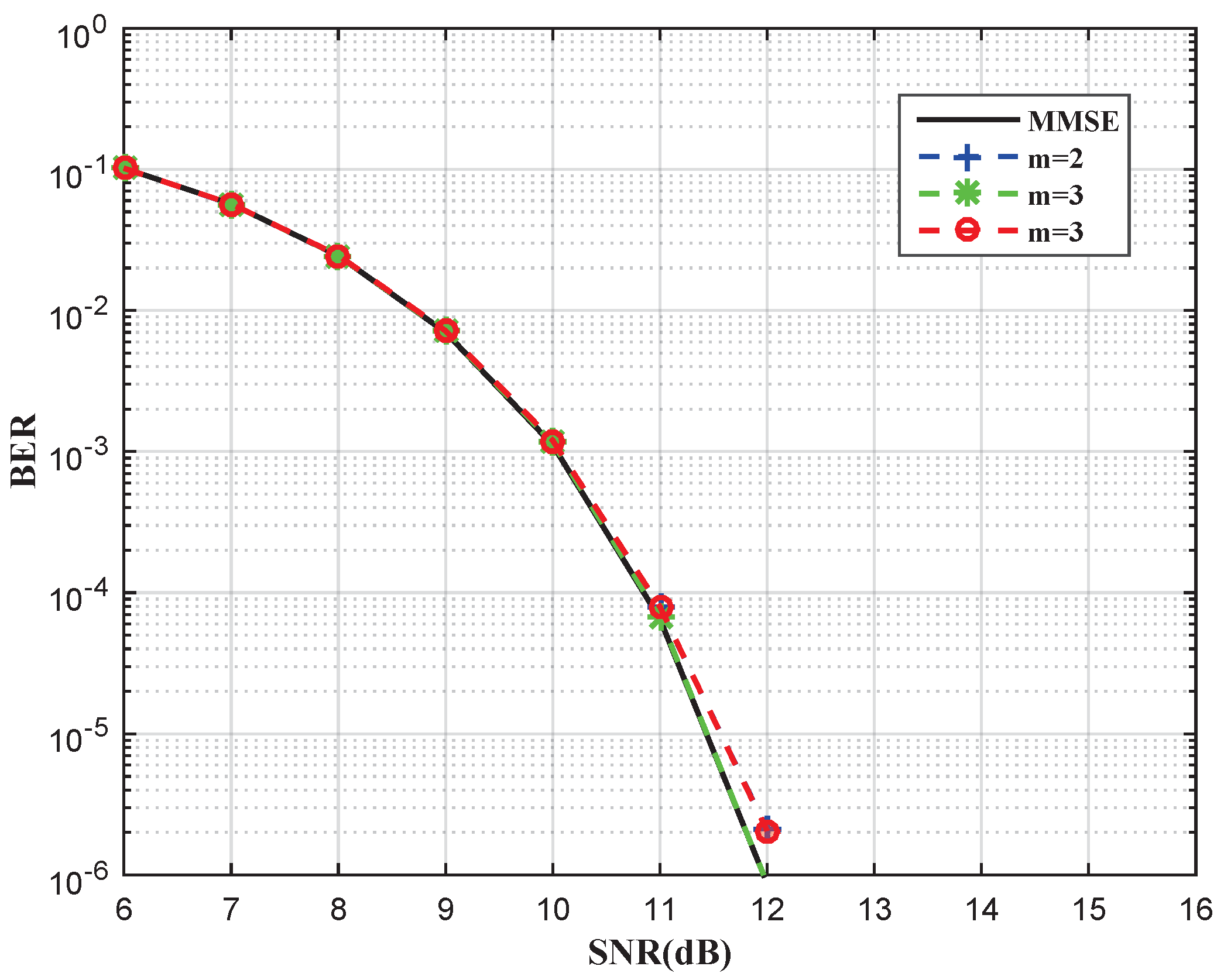
4. Simulation Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Ciuonzo, D.; Rossi, P.S.; Dey, S. Massive MIMO channel-aware decision fusion. IEEE Trans. Signal Process. 2015, 63, 604–619. [Google Scholar] [CrossRef]
- Shirazinia, A.; Dey, S.; Ciuonzo, D.; Rossi, P.S. Massive MIMO for decentralized estimation of a correlated source. IEEE Trans. Signal Process. 2016, 64, 2499–2512. [Google Scholar] [CrossRef]
- Ciuonzo, D.; Rossi, P.S.; Dey, S. Massive MIMO meets decision fusion: Decode-and-fuse vs. decode-then-fuse. In Proceedings of the IEEE 8th Sensor Array and Multichannel Signal Processing Workshop (SAM), A Coruna, Spain, 22–25 June 2014; pp. 265–268. [Google Scholar]
- Xiang, W.; Zheng, K. An overview of 5G requirements. In 5G Mobile Communications; Shen, X.S., Ed.; Springer International Publishing: Basel, Switzerland, 2017; pp. 3–27. [Google Scholar]
- Wu, S.; Zheng, K.; Aggoune, H.; Alwakeel, M.M.; You, X. A general 3D non-stationary 5G wireless channel model. IEEE Trans. Commun. 2018, 66, 3065–3077. [Google Scholar] [CrossRef]
- Yang, S.; Hanzo, L. Fifty years of MIMO detection: The road to large-scale MIMOs. IEEE Commun. Surv. Tuts. 2015, 17, 1941–1988. [Google Scholar] [CrossRef]
- Zhou, C.; Gu, Y.; He, S.; Shi, Z. A robust and efficient algorithm for coprime array adaptive beamforming. IEEE Trans. Veh. Technol. 2018, 67, 1099–1112. [Google Scholar] [CrossRef]
- Shi, Z.; Zhou, C.; Gu, Y.; Goodman, N.A.; Qu, F. Source estimation using coprime array: A sparse reconstruction perspective. IEEE Sens. J. 2017, 17, 755–765. [Google Scholar] [CrossRef]
- Garcia, N.; Wymeersch, H.; Larsson, E.G.; Haimovich, A.M.; Coulon, M. Direct localization for massive MIMO. IEEE Trans. Signal Process. 2017, 65, 2475–2487. [Google Scholar] [CrossRef]
- Al-Falahy, N.; Alani, O.Y. Technologies for 5G networks: Challenges and opportunities. IT Prof. 2017, 19, 12–20. [Google Scholar] [CrossRef]
- Xiao, L.; Yang, P.; Xiao, Y.; Fan, S.; Renzo, M.D.; Xiang, W.; Li, S. Efficient compressive sensing detectors for generalized spatial modulation systems. IEEE Trans. Veh. 2017, 66, 1284–1298. [Google Scholar] [CrossRef]
- Barbero, L.G.; Thompson, J.S. Fixing the complexity of the sphere decoder for MIMO detection. IEEE Trans. Veh. Technol. 2017, 66, 2131–2142. [Google Scholar] [CrossRef]
- Romano, G.; Ciuonzo, D.; Rossi, P.S.; Palmieri, F. Low-complexity dominance-based sphere decoder for MIMO systems. Signal Process. 2013, 21, 2500–2509. [Google Scholar] [CrossRef]
- Mandloi, M.; Bhatia, V. Low-complexity near-optimal iterative sequential detection for uplink massive MIMO systems. IEEE Commun. Lett. 2017, 21, 568–571. [Google Scholar] [CrossRef]
- Rosário, F.; Monteiro, F.A.; Rodrigues, A. Fast matrix inversion updates for massive MIMO detection and precoding. IEEE Signal Process. Lett. 2016, 23, 75–79. [Google Scholar] [CrossRef]
- Wu, Z.; Zhang, C.; Xue, Y.; Xu, S.; You, X. Efficient architecture for soft-output massive MIMO detection with Gauss-Seidel method. In Proceedings of the IEEE International Symposium on Circuits and Systems, Montreal, QC, Canada, 22–25 May 2016; pp. 1886–1889. [Google Scholar]
- Sun, Y.; Li, Z.; Zhang, C.; Zhang, R.; Yan, F.; Shen, L. Low complexity signal detector based on SSOR iteration for large-scale MIMO systems. In Proceedings of the IEEE Conference on Wireless Communications and Signal Processing, Nanjing, China, 11–13 October 2017; pp. 1–6. [Google Scholar]
- Kong, B.Y.; Park, I. Low-complexity symbol detection for massive MIMO uplink based on Jacobi method. In Proceedings of the IEEE Annual International Symposium on Personal, Indoor, and Mobile Radio Communications, Valencia, Spain, 4–8 September 2016; pp. 1–5. [Google Scholar]
- Minango, J.; de Almeida, C.; Daniel Altamirano, C. Low-complexity MMSE detector for massive MIMO systems based on Damped Jacobi method. In Proceedings of the IEEE Annual International Symposium on Personal, Indoor, and Mobile Radio Communications, Montreal, QC, Canada, 8–13 October 2017; pp. 1–5. [Google Scholar]
- Kalousek, Z. Steepest descent method with random step lengths. Found. Comput. Math. 2017, 17, 359–422. [Google Scholar] [CrossRef]
- Zhang, K. Prerequisite konwledge. In Iterative Algorithm for Solving Solutions of Matrix Equations; National Defense Industry Press: Beijing, China, 2015; pp. 1–22. [Google Scholar]
- Mandloi, M.; Bhatia, V. Error recovery based low-complexity detection for uplink massive MIMO systems. IEEE Wirel. Commun. Lett. 2017, 6, 302–305. [Google Scholar] [CrossRef]
- Zhang, C.; Jing, Y.; Huang, Y.; Yang, L. Performance analysis for massive MIMO downlink with low complexity approximate Zero-Forcing precoding. IEEE Trans. Commun. 2018, 66, 3848–3864. [Google Scholar] [CrossRef]
- Li, Y.; Yang, Q. The comparison of generalized inverse matrix algorithms complexity. Sch. Math. Sci. 2012, 45, 7–13. [Google Scholar]
- Gu, T.; An, H.; Liu, X.; Xu, X. Iterative method. In Iterative Method and Preprocessing Technique; Shi, Z., Wang, X., Yu, H., Eds.; Science Press: Beijing, China, 2015; pp. 59–105. [Google Scholar]
- Björck, Å. Iterative methods. In Numerical Methods in Matrix Computations; Antman, S., Greengard, L., Holmes, P., Eds.; Springer International Publishing: Cham, Switzerland, 2015; pp. 613–638. [Google Scholar]
- Gao, Y.; Niu, H.; Kaiser, T. Massive MIMO detection based on belief propagation in spatially correlated channels. In Proceedings of the IEEE Conference on Systems Communications and Coding, Hamburg, Germany, 6–9 February 2017; pp. 1–6. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| m Value | Signal-to-Noise Ratio (Target ) | Computational Complexity of Moore–Penrose Inverse |
|---|---|---|
| m = 2 | decibel (dB) | |
| m = 3 | dB | |
| m = 4 | dB |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, X.; Li, Z.; Xing, S.; Liu, Y.; Wu, Q.; Li, B. An Improved Jacobi-Based Detector for Massive MIMO Systems. Information 2019, 10, 165. https://doi.org/10.3390/info10050165
Zhao X, Li Z, Xing S, Liu Y, Wu Q, Li B. An Improved Jacobi-Based Detector for Massive MIMO Systems. Information. 2019; 10(5):165. https://doi.org/10.3390/info10050165
Chicago/Turabian StyleZhao, Xiaoqing, Zhengquan Li, Song Xing, Yang Liu, Qiong Wu, and Baolong Li. 2019. "An Improved Jacobi-Based Detector for Massive MIMO Systems" Information 10, no. 5: 165. https://doi.org/10.3390/info10050165
APA StyleZhao, X., Li, Z., Xing, S., Liu, Y., Wu, Q., & Li, B. (2019). An Improved Jacobi-Based Detector for Massive MIMO Systems. Information, 10(5), 165. https://doi.org/10.3390/info10050165