1. Introduction
In the last few years, the importance of epidemic modeling and control has increased in respect of their capability to describe infectious disease and proposing suitable control strategies [
1,
2,
3,
4,
5,
6,
7,
8]; moreover, the power of epidemic modeling has been used also in different fields, such as to study the propagation effects of a virus outbreak on a network [
9,
10].
The scenario discussed in this paper considers a unique population in which an epidemic disease is spreading and a second non-infectious disease is present. The non-infectious disease is assumed not to be risky by itself, but it may be fatal when it becomes a complication of the epidemic disease. Moreover, while the former yields an immunity, the latter could be caught repeatedly. This is a very common scenario, and happens, for example, in measles and for the HIV/AIDS; if one thinks of an age-structured model, a similar context occurs if referring to elderly subjects who could be at risk when a complication is added to an infectious disease. This is the reason vaccination campaigns are promoted especially among subjects in risky conditions.
The problem of controlling two epidemic spreads has been considered in different control frameworks, depending on the specificity of the diseases considered and, in particular, on the modalities of contagiousness. A different point of view considers a unique epidemic disease and two distinct but interacting populations, such as in [
11], or as in [
12], where a disease spreading among two populations in interconnected regions is considered. It is shown that when there is only a partial immunization, the best treatment action is to preferentially control the region with the lower level of infection and only when there are resources left over it is advisable to treat the other population. In [
13] the interaction between two different diseases, tuberculosis and diabetes mellitus, is discussed, noting that from a medical point of view diabetes mellitus is a risk factor for tuberculosis, and even that the latter may be caused by diabetes. Also, social and economic aspects are discussed, demonstrating that malnutrition, HIV, crowded living conditions and low level of standards in hospitals contribute to high incidence of tuberculosis. The influence of one disease on the spread of the second is discussed in [
14], in which a complex pattern of epidemiological behavior is proposed. More than one complication, with respect to the main disease, is considered in [
15], where typhoid fever is modeled and many complications are considered, along with data about the population.
Suitable strategies are introduced for trying to stop the epidemic spread; general possibilities are vaccination, whenever possible, informative campaigns, quarantine, and therapy. More ad hoc actions depend on specific disease, as in [
2], where the most effective control is to improve the test to check for HIV. Optimal control appears to be the natural framework to face an epidemic disease with the best resource allocation [
4,
5,
16,
17,
18].
In this paper, an improvement of the model introduced in [
19] is proposed. A unique population with two pathologies is considered: the first one is the dangerous disease that may be transmitted only by contact with infected patients, and the second one may be fatal only if it becomes a complication of the first. Moreover, the former yields an immunity, whereas the second one could be caught repeatedly. The healthy population is partitioned into two classes—the subjects that can caught both the pathologies, and the ones that have the immunity from the first contagious epidemic. Then, there are three classes of patients: the first one of subjects with only the dangerous contagious disease; the second class constituted of patients with both pathologies; then there is the class of individuals that has the second disease and could caught also the first one, if not immunized.
Spontaneous healing is assumed as well as different birth and death rates for each class; this is the first difference with respect to the model in [
19], in which it was not considered that a patient with the infectious disease could become healthy again without an external action. The second novelty is the deep-model analysis conducted to determine the existence of the equilibrium points and to discuss their stability; the presence of a bifurcation value for the contagious rate, as well as its relationship with the reproduction number, has been established. The two-epidemics model is controlled by using an optimal control strategy that involves the vaccination and the therapy of infected patients, in the realistic case of bounded resources; the introduction of these constraints represents a further novelty with respect to the model in [
19]; in the numerical section, these aspects are discussed. The paper is organized as follows: in
Section 2 the mathematical model proposed is discussed, whereas the optimal control problem formulation is introduced in
Section 3. Numerical simulations and discussions are proposed in
Section 4, and conclusions are in
Section 5.
2. The Mathematical Model
The mathematical model proposed and discussed in this section describes the interactions between subjects in a population where two different diseases are present. The most dangerous one is an infectious disease; the other one is a complication that is a not particularly risky pathology when it is the only one affecting the patients, but it may become fatal in combination with the infectious one. Typical examples are HIV or pneumonia that weaken a patient that, consequently, may become vulnerable to other diseases that, in general, are not so dangerous. This is also what happens to the elderly population that is sensibly monitored and invited by the government to participate to vaccination campaigns, especially to avoid complications. Another example involves immunosuppressed subjects and measles; it becomes a risky disease essentially because of possible and frequent complications, such as diarrhea and pneumonia.
For an infectious disease, the basic model is the SIR one, considering the classical categories of susceptible (S), infected (I), and removed (R) subjects; in this case, a susceptible individual can catch the disease, thus becoming infectious, and then enters the class of removed people, having received the immunization; the latter can also be obtained with a vaccination action. If a second non-infectious disease is present in the population, the complete model must include other classes taking into account the main characteristics of this second illness; in particular, a subject does not get immunization from the complication. The infected patients can be divided according to two possible conditions, depending on whether they are or are not affected by the second pathology. Moreover, the possibility of being affected by the second pathology for susceptible subjects requires the introduction of a further class for the patients with the second pathology, but not still immune from the epidemic disease. Then, five states are introduced:
- :
the individuals than can be infected by the contagious illness;
- :
the individuals immune from the contagious illness;
- :
the patients infected but not affected by the second pathology;
- :
the patients affected by both the pathologies;
- :
the patients affected by the second pathology only, not immune from the infectious illness.
Some hypotheses are assumed:
individuals and can become affected by the second pathology;
from the class it is possible to become an subject with probability or, if already immunized, go in the class;
a subject in the class can get the infectious disease from the and the subjects and enter in the class; successively, a subject could get also the second disease and transit in the class.
The main control action, the vaccination applied on susceptible subjects , has already been mentioned; also, therapy actions over patients in the classes , , are introduced. More precisely, four control actions are considered:
-
represents the action devoted to vaccinating healthy non-immune individuals , making them transition to the ;
-
is the therapy action over the patients in ;
-
is the therapy action over the patients in ;
-
the therapy for the second illness, applied to .
Defining
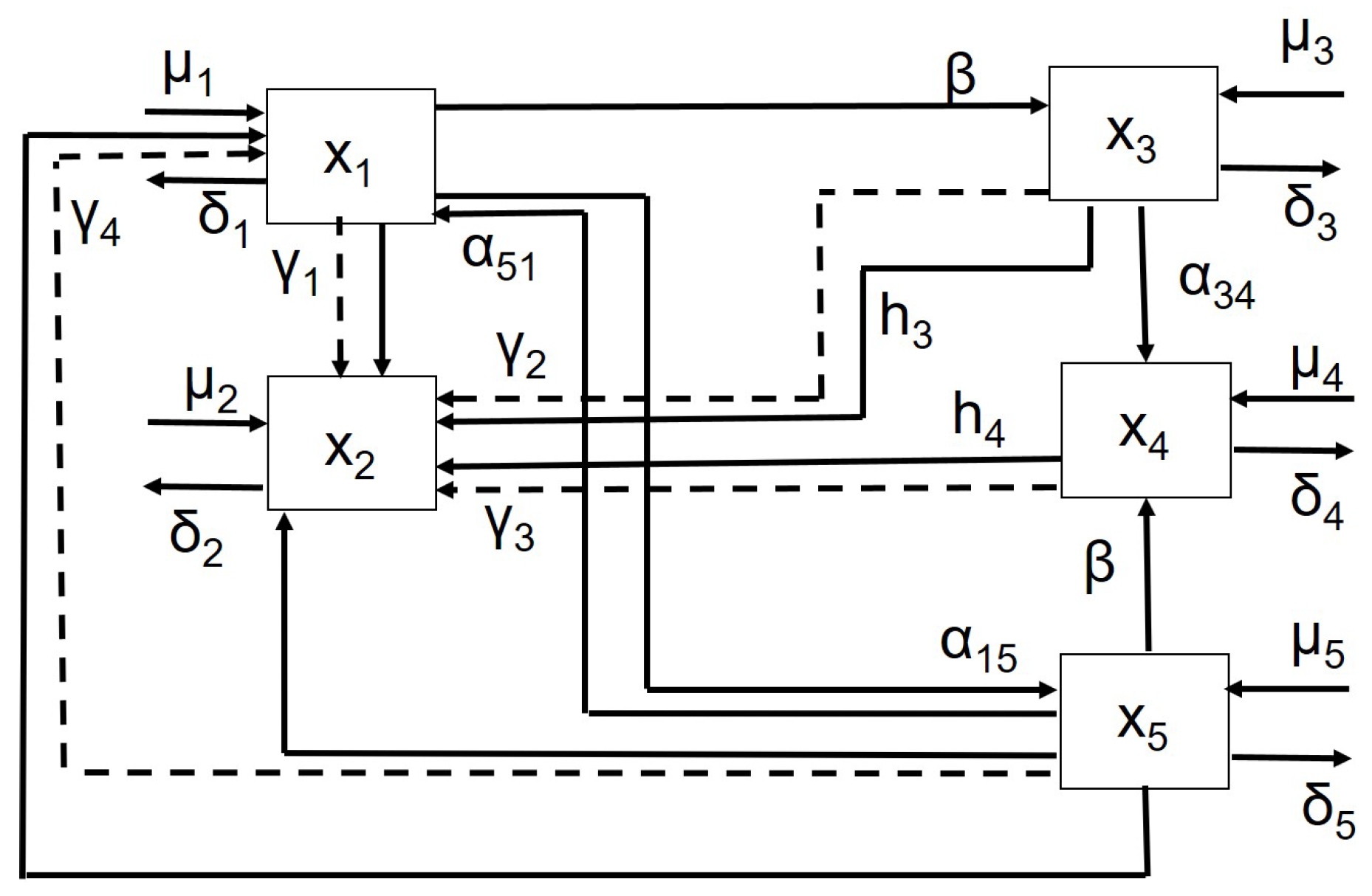
the state vector and with
the control vector, the following model, shown in
Figure 1, is proposed:
where:
and
with initial condition
. In the model (
1), with (
2) and (
3), the parameters introduced are:
, the contagious rate;
, which are the occurrence rates of the second non-infectious pathology; the subscripts denote the transition from state i to state j; these rates can be assumed to be different, to put in evidence the differences between healthy people and infected ones. It is assumed that recovery from the second illness can also be spontaneous from the class, and the rate of autonomous healing is denoted again with the coefficients , being a natural transition proportional to the number of subjects;
, representing the efficiencies of the control actions;
, , representing the spontaneous healing rate of the and patients respectively;
, , the rate of new incomers in all the compartments;
, , which are the percentages of removed people;
, the percentage of subjects that from the class enter in the one.
This model represents an improvement of the one proposed in [
19], in which the spontaneous healing capability was not included.
2.1. The Model Analysis
The analysis of the model is proposed, referring to the absence of control action as well as assuming no entries in the
,
, and
compartments, thus
in (
1). To determine the equilibrium points the equation
is considered, thus obtaining the system:
One solution is the virus-free equilibrium
Please note that the non-null elements do not depend on
and are positive for any combination of parameters; therefore, the point
in (
10) is always an equilibrium point.
With regard to the other equilibrium points, the analytical solutions of the system (
4) are rather complicated, and they depend also on
, in addition to all the other model parameters; the only acceptable points are those with non-negative components, if they exist. In the following, the model parameters, with the exception of
, are all fixed, thus deducing, from a graphical point of view, the dependence of the solutions of the system (
5)–(9) on
. The following values of the parameters are used:
These choices have been guided by similarity with respect to classical epidemic models, such as the SIR one. By using these values, the system (
5)–(9) has three solutions. They are not all feasible equilibrium points; the only acceptable solutions are those with all the components not negative. With these parameter values the virus-free equilibrium is:
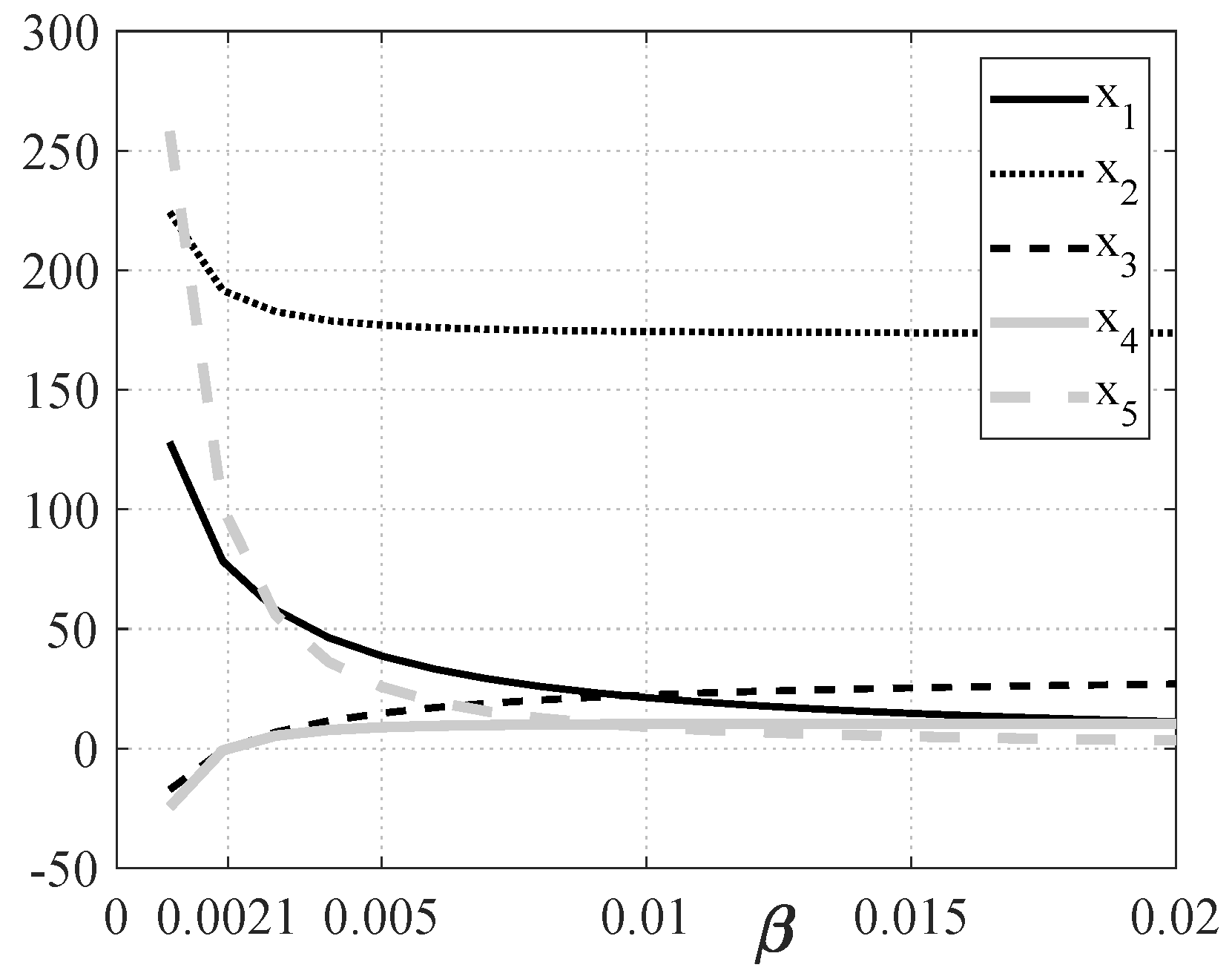
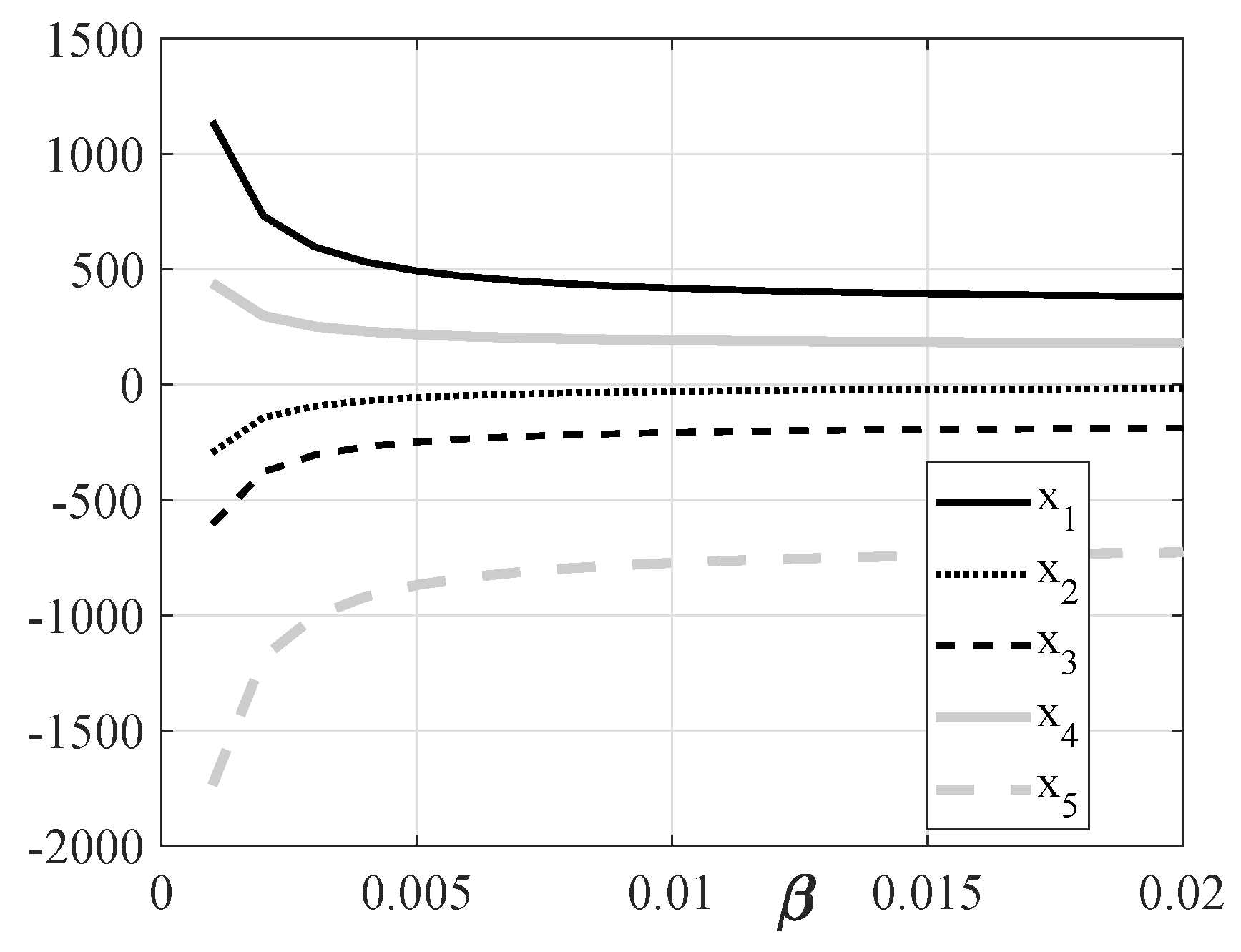
There are two other solutions of the system (
5)–(9), called
and
; in
Figure 2 and
Figure 3 they are shown as function of
, by plotting together the five components of each solution. It can be noted that in
Figure 2 the component
of the solution
is negative up to a threshold value
of
, whereas from
Figure 3 it can be observed that three components (
,
, and
) are always negative, and therefore
is not an equilibrium point for any
. For a small contact rate
, there exists only one equilibrium point,
, whereas for
there exists also the second equilibrium point, now indicated by
, whose components evolve as in
Figure 2. The value of
corresponding to the chosen parameters is equal to
, as can be deduced from
Figure 2.
To study the stability of the equilibrium points,
and, if it exists,
, the Jacobian of the system must be evaluated in each of these points and the corresponding eigenvalues calculated. The Jacobian is:
Obviously, the eigenvalues of the Jacobian matrix
J depends on the value of
, once the components of the equilibrium point are substituted. Therefore, even if the virus-free equilibrium
components do not depend on
, as already noted, its stability does. The matrix (
12), evaluated at
, is
whose eigenvalues, as function of
, are:
The eigenvalues , , and are negative and do not depend on ; the eigenvalues and are negative only if , a value that coincides, as expected, with . It can be concluded that for the unique equilibrium point is locally asymptotically stable.
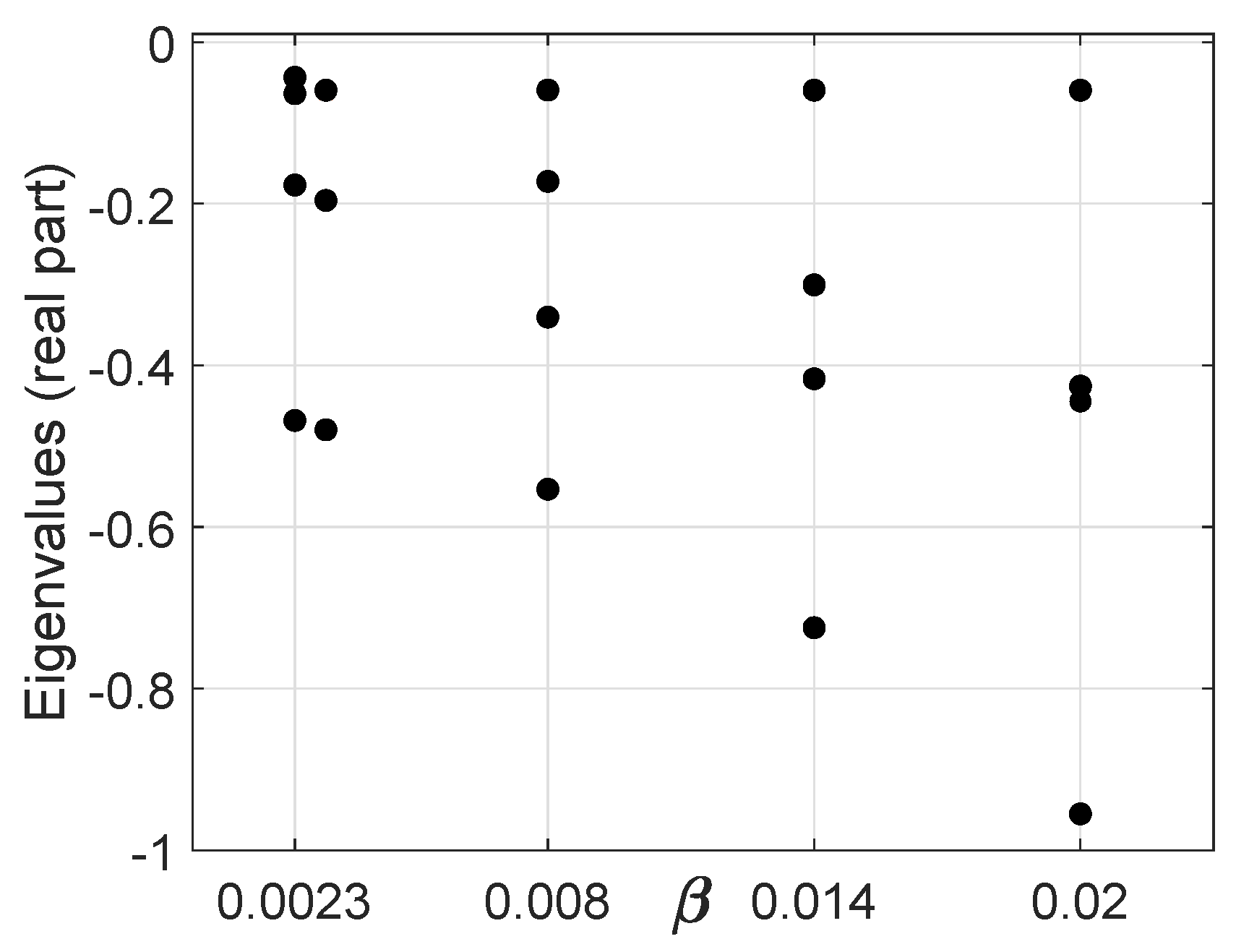
As for the second equilibrium point,
, it has already been stated that it exists only for
; the analysis of its stability is rather complicated from analytical point of view. In
Figure 4 the real part of the eigenvalues of the Jacobian matrix
J, Equation (
12), when evaluated for some values of
,
,
,
,
,
is shown. Please note that there exists a couple of complex eigenvalues with, as expected, the same real part.
Then, it is possible to conclude that for , exists and is locally stable, while is not admissible; on the other hand, when , is unstable while is a locally stable equilibrium point. This is the classical case of a Transcritical Bifurcation.
4. Simulations Results
In this Section, the proposed model and the optimal control strategy are analyzed numerically. The algorithm adopted for the optimal control problem is based on a sequential quadratic programming method: at each iteration, a quadratic programming subproblem is solved by using a quasi-Newton approximation of the Hessian of the Lagrangian function. The parameters of the model are the ones proposed in
Section 2; the initial conditions assumed reflect the situation in which the population is mostly composed of susceptible subjects and a small number of infected individuals:
,
,
,
, and
. The state terms
in the cost index can be interpreted as the number of dead individuals among the three groups of patients; the result is obtained by setting
,
. The time control period is set equal to 5 years. To study the effectiveness of the model as well as the reasonability of the optimal control strategy, some case studies are proposed. To evaluate the advantages of the different strategies, some quantities are calculated:
the variation V of the sum of the number of dead people in the classes and , the ones in which the patients are more at risk, normalized with respect to the same quantity in absence of control;
the cost of the control , ;
the efficacy E of the control action measured as the product of the total number of dead people (in all the classes) multiplied by the total cost applied.
As
Case 1, a first choice of the
parameter is
; this means that the epidemic will not spread, being the corresponding
. The same analysis is performed in
Case 2 by choosing
; the corresponding reproduction number is
thus leading to an endemic condition. All the control weights in the cost function (
25) are set equal to
.
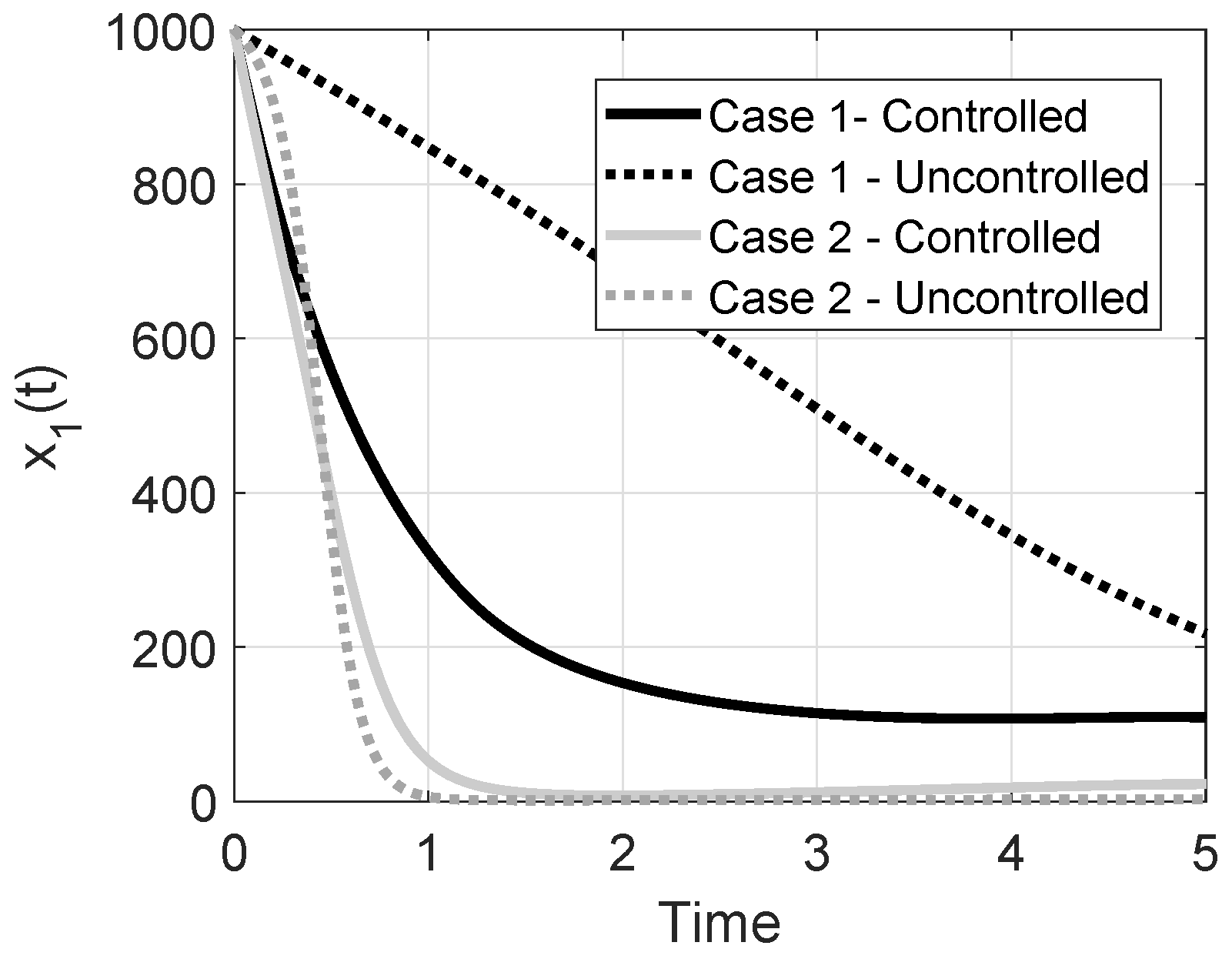
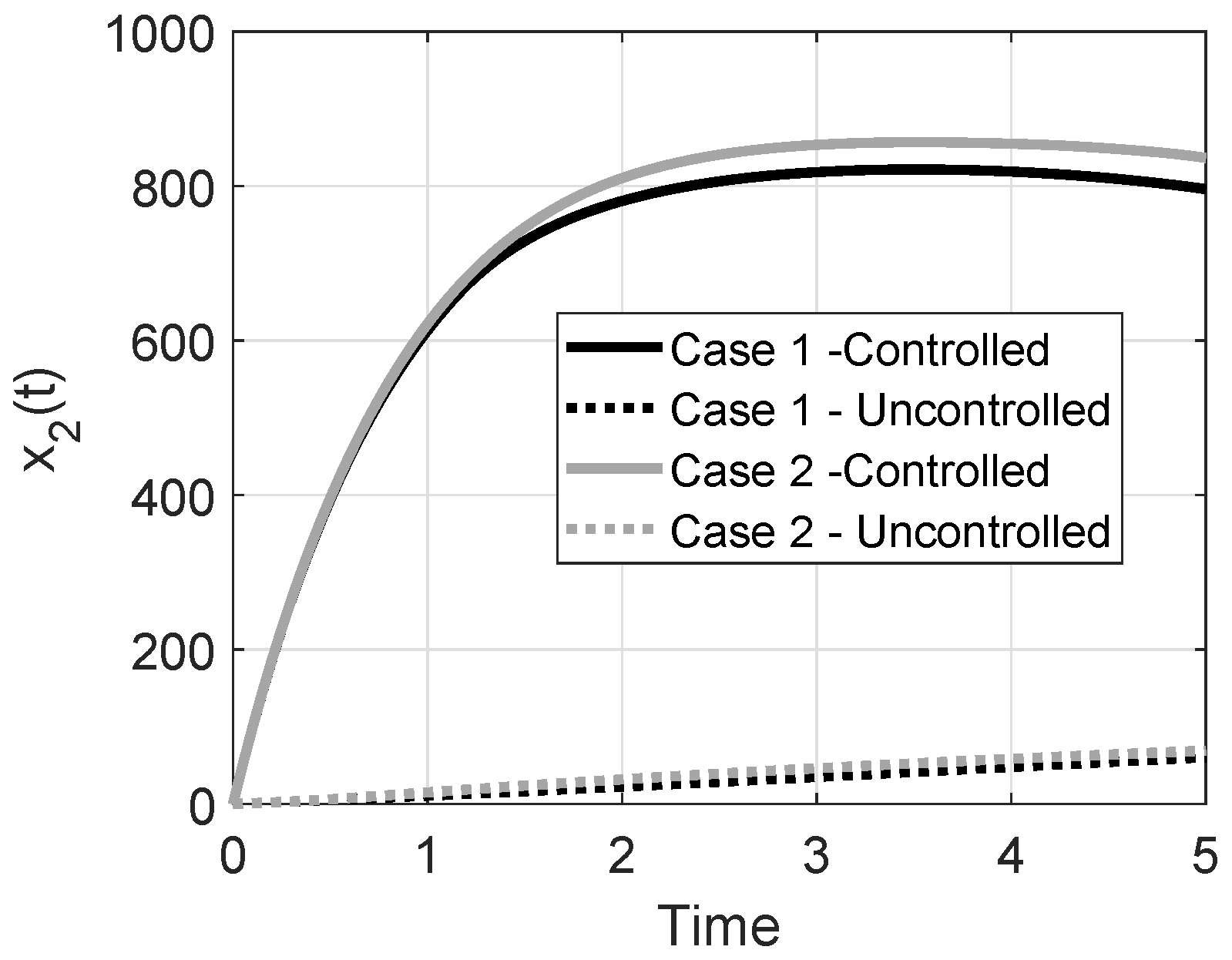
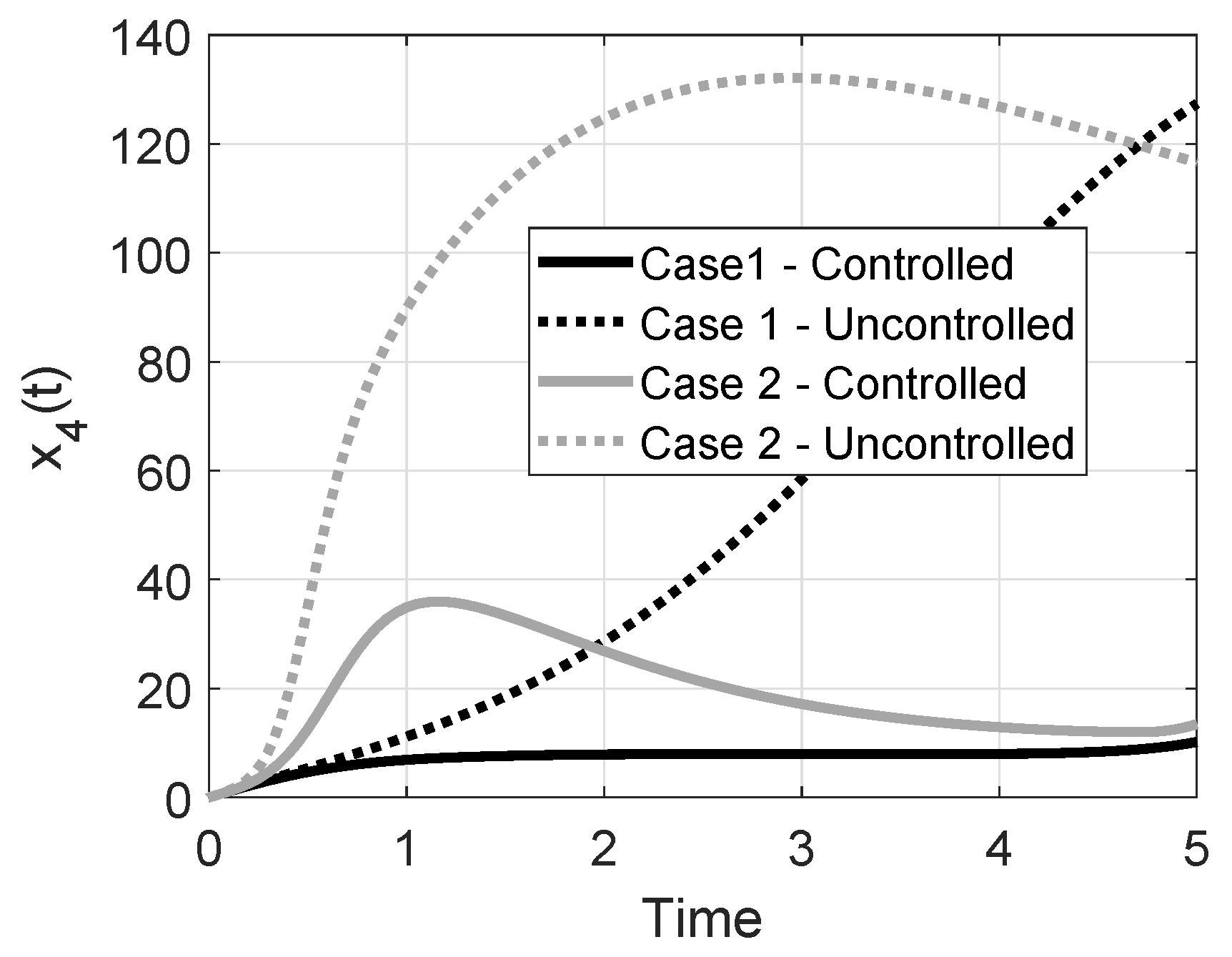
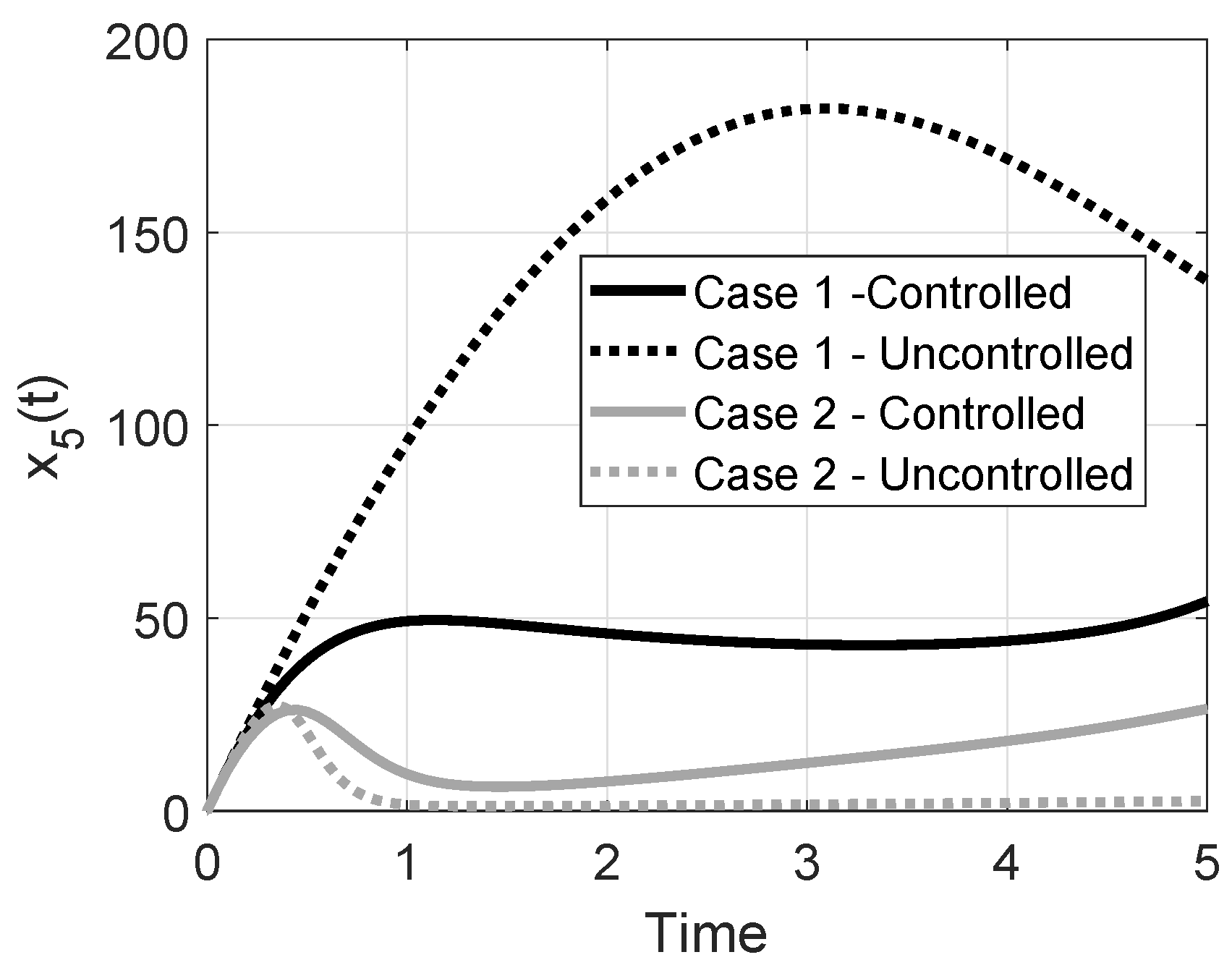
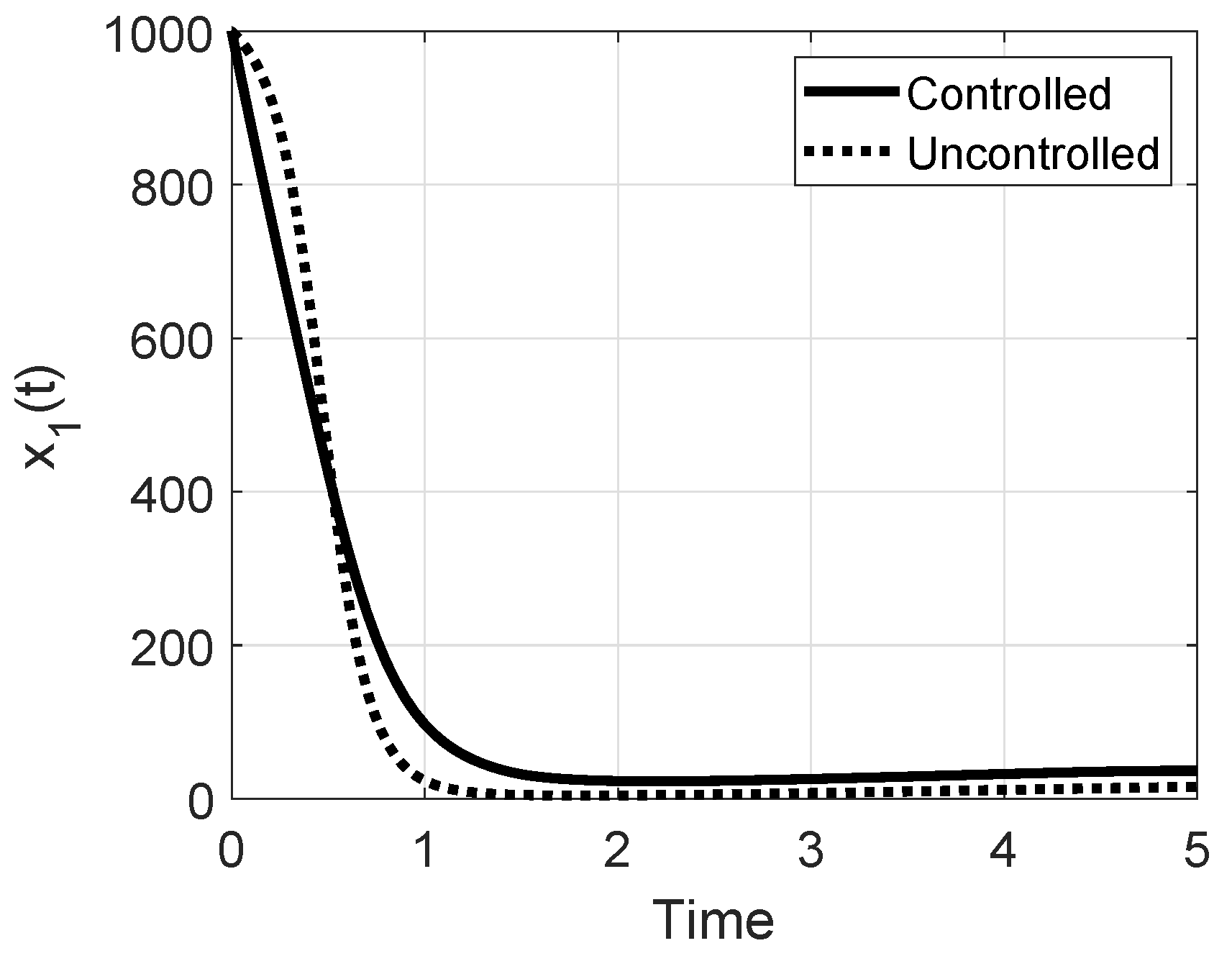
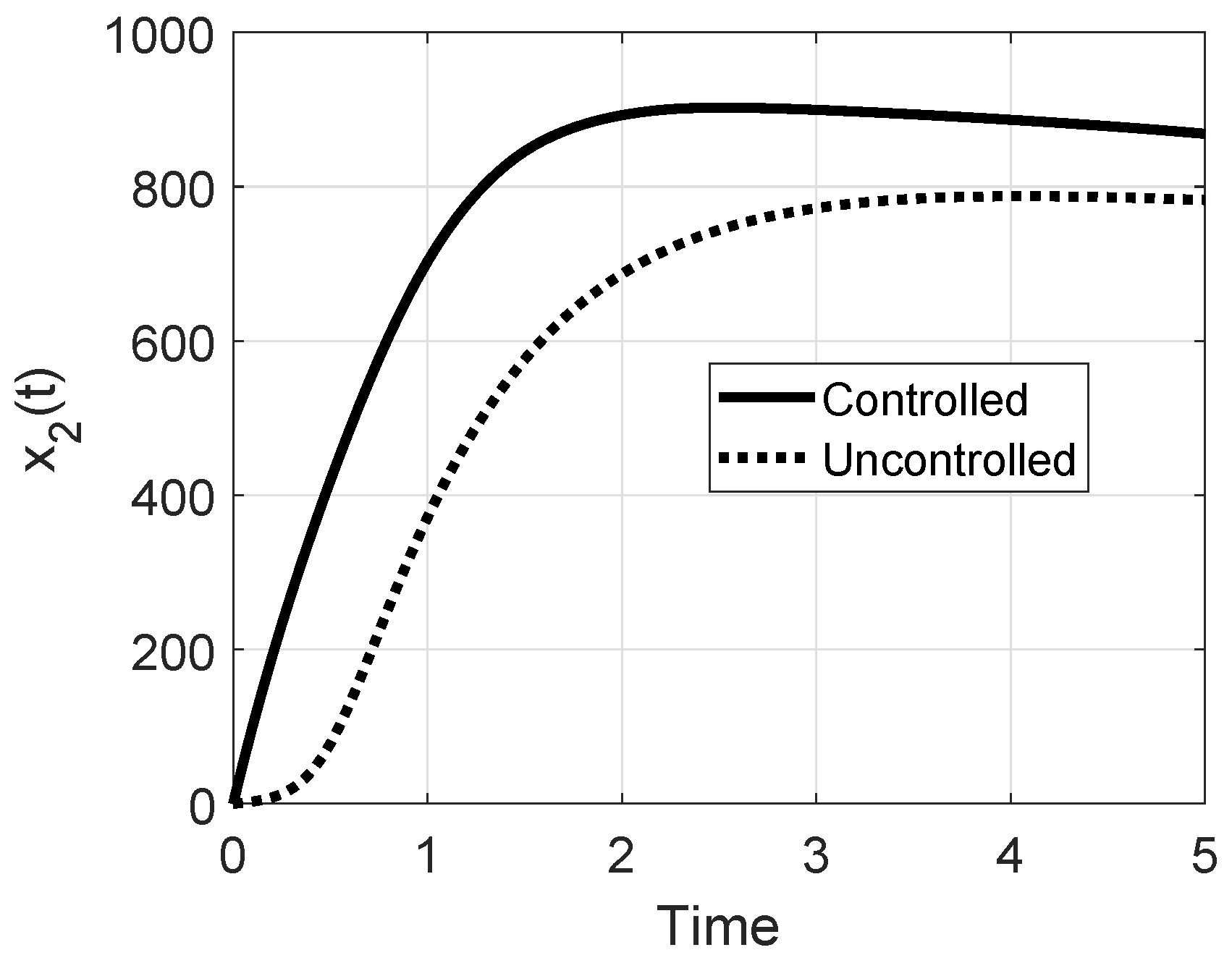
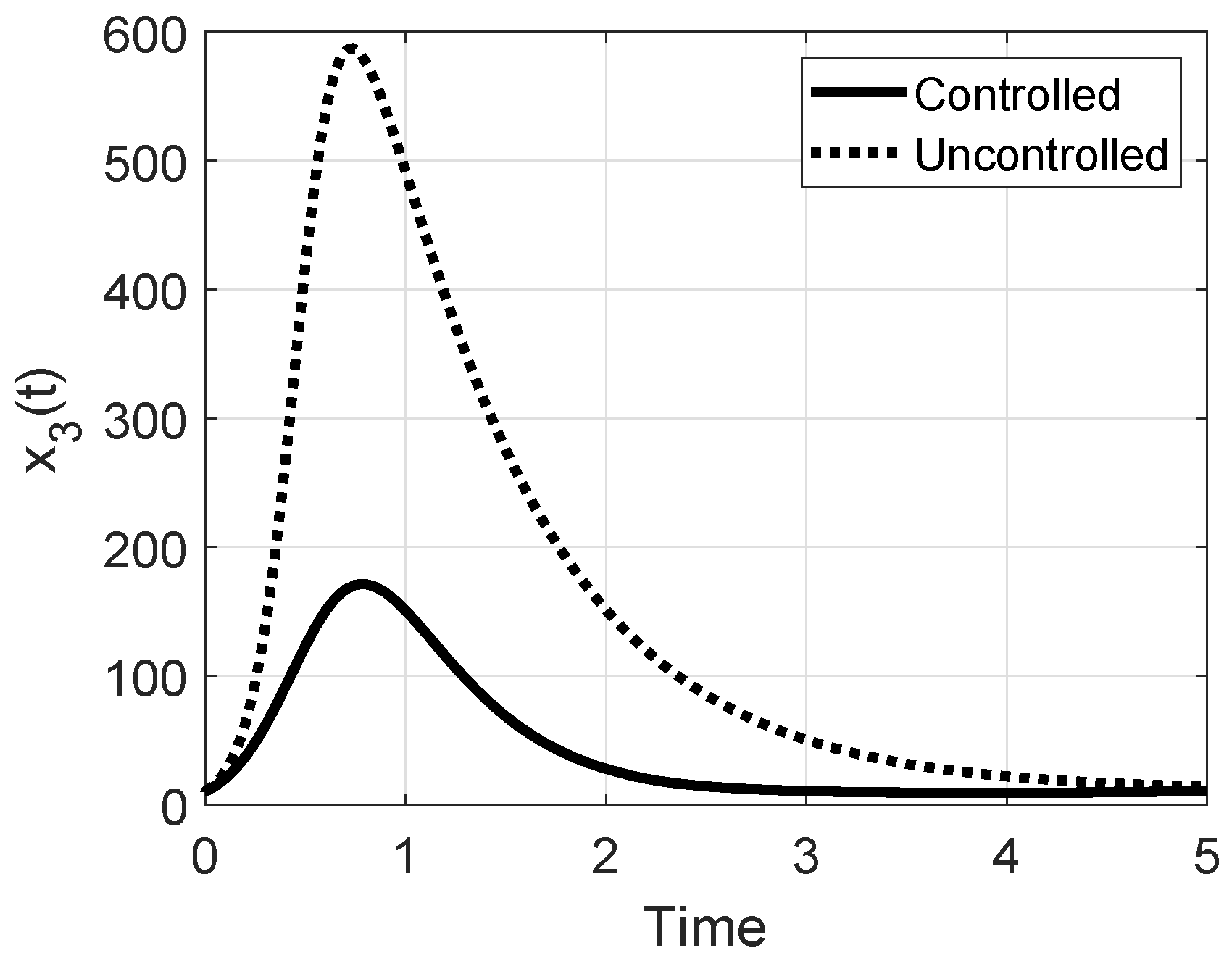
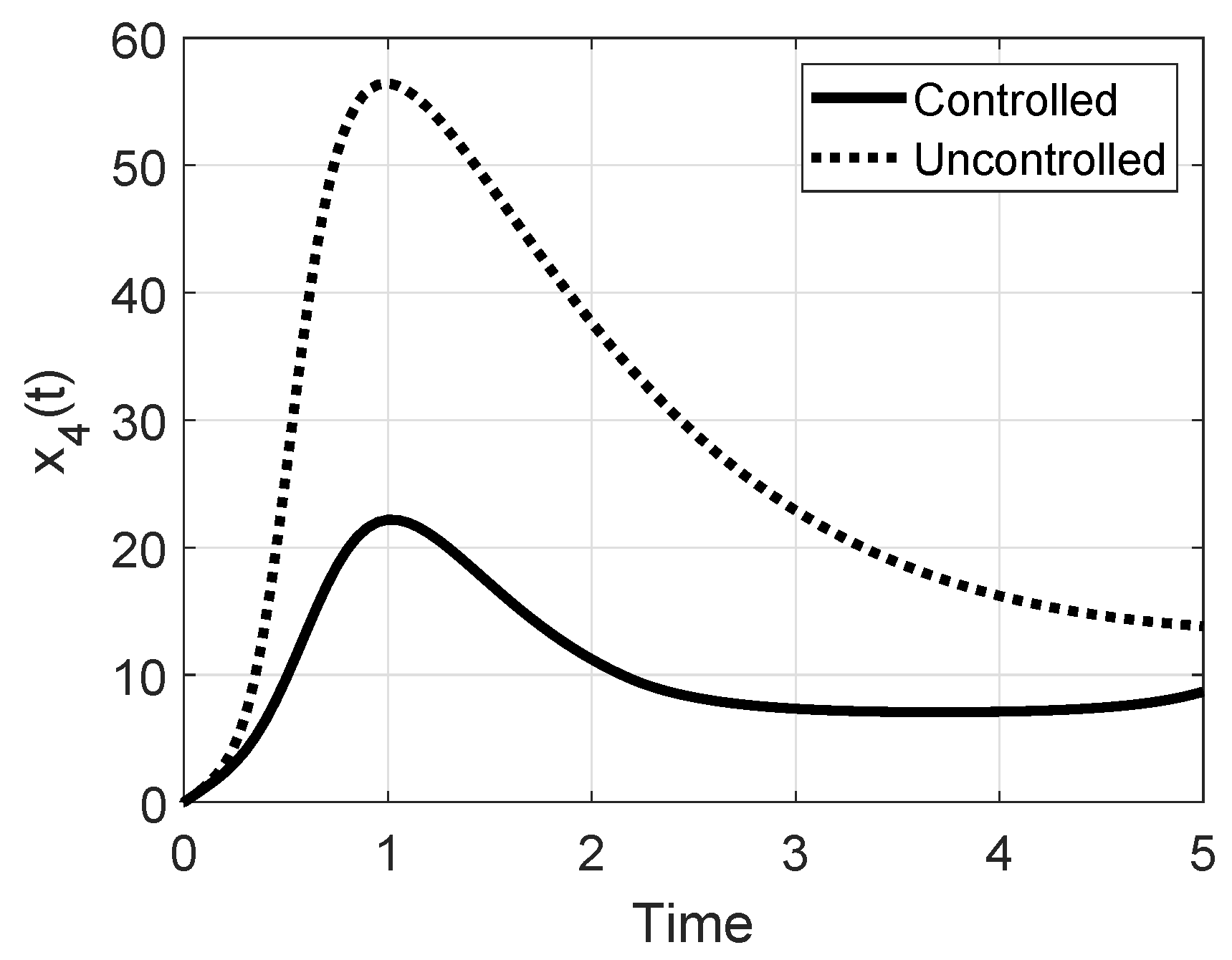
In
Figure 5,
Figure 6,
Figure 7,
Figure 8 and
Figure 9 the evolutions of the states
,
are shown along with the same quantities when no control is applied, comparing
Case 1 and
Case 2. The state evolutions corresponding to the immune subjects
do not vary significantly in the two situations, whereas the dangerousness of
Case 2 is evident in the non-controlled case for the evolution of
and
patients, reaching higher values than in
Case 1,
Figure 7 and
Figure 8. Nevertheless, the control actions can reduce the peaks significantly.
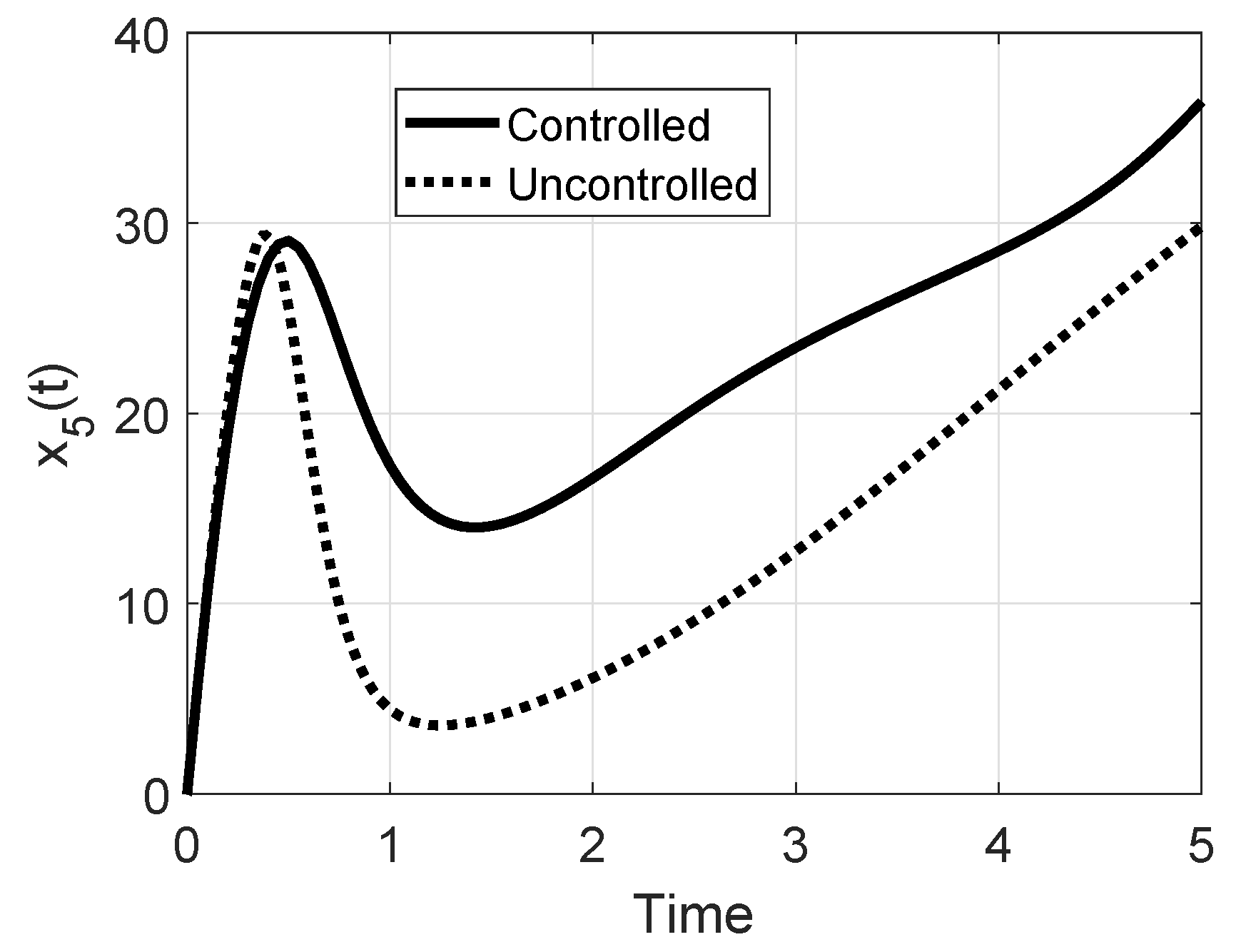
As for the evolution of the subjects , it can be noted that they increase more in the Case 1 than in Case 2; this is reasonable since in Case 1, the epidemic disease is not spreading and therefore the subjects will transit mainly in the , , and classes.
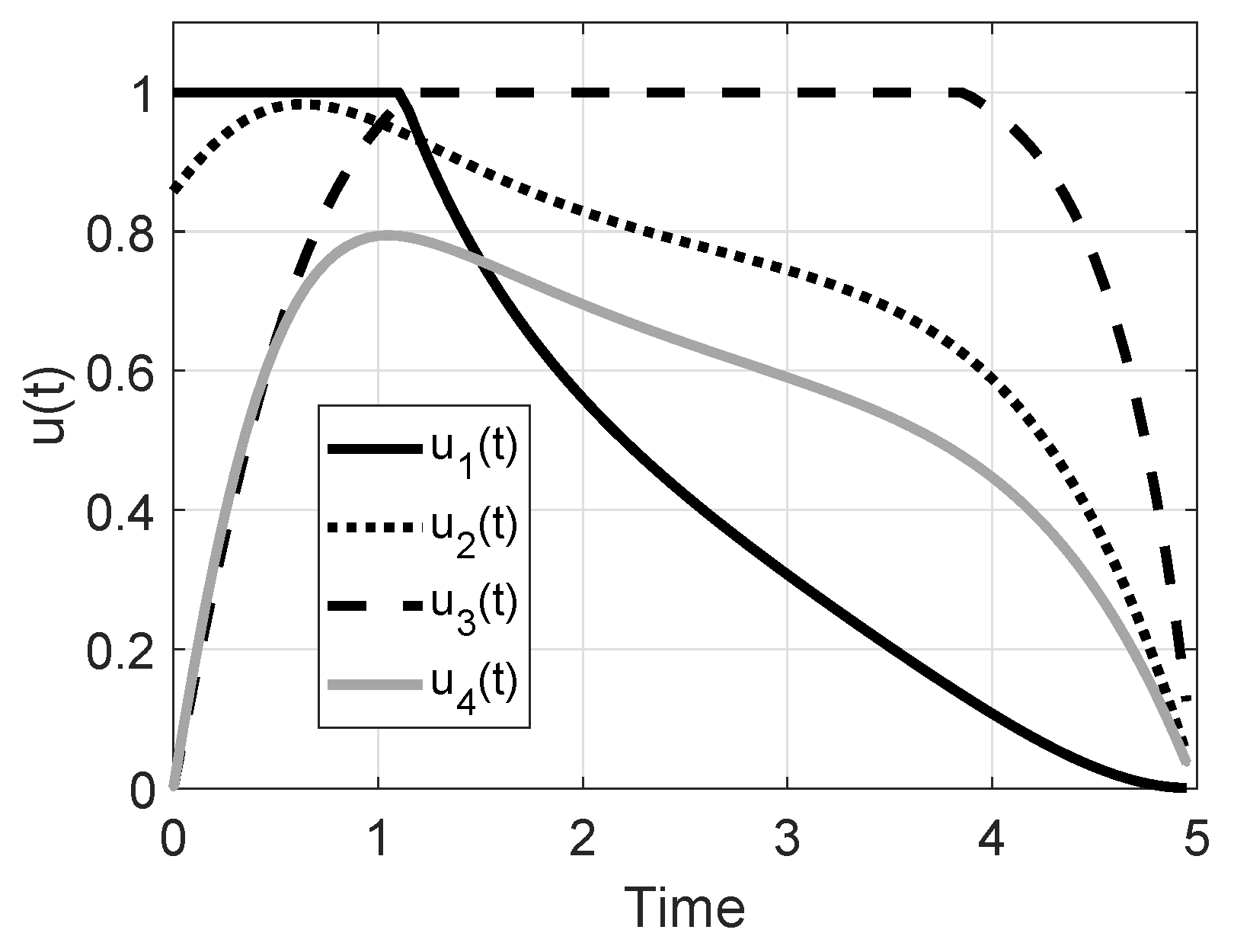
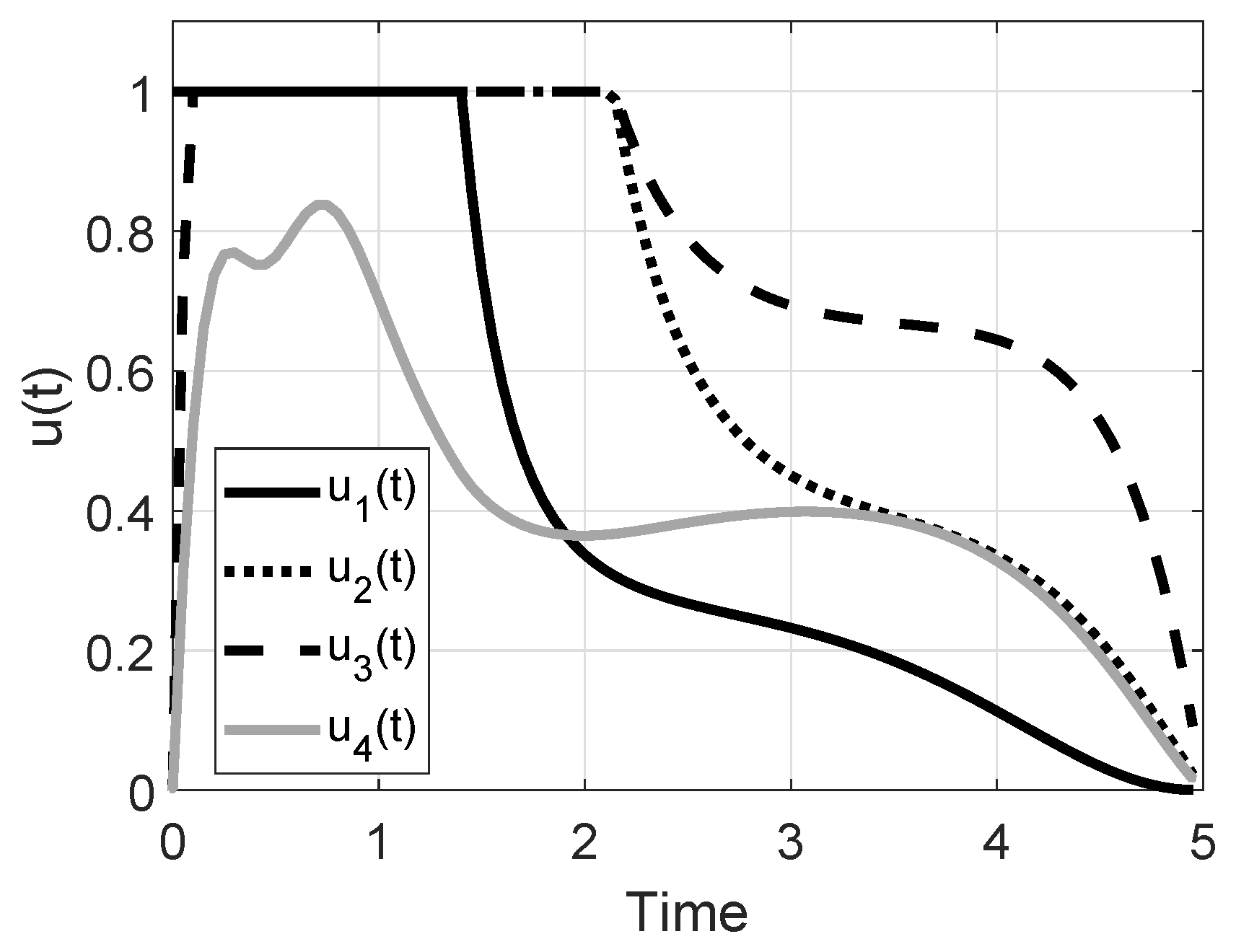
In
Figure 10 the optimal controls
,
are shown for
Case 1. The epidemic spread is not a risky one, the value of
being small; nevertheless, the control actions allow the decrease of the number of subjects
,
,
, as well as of the
individuals, which also decreases without control, but less rapidly.
The control actions show a strong effort in vaccination up to about 1 year, while, as expected, the therapy action on the subjects in the most risky condition of the patients in the class must be applied for almost all the control periods. Please note that the control does not reach the maximum value allowed. This is an example of an efficient allocation strategy: it appears more convenient to vaccinate the subjects with maximum effort at the beginning of the control period and then, while decreases, the therapy must reach its maximum.
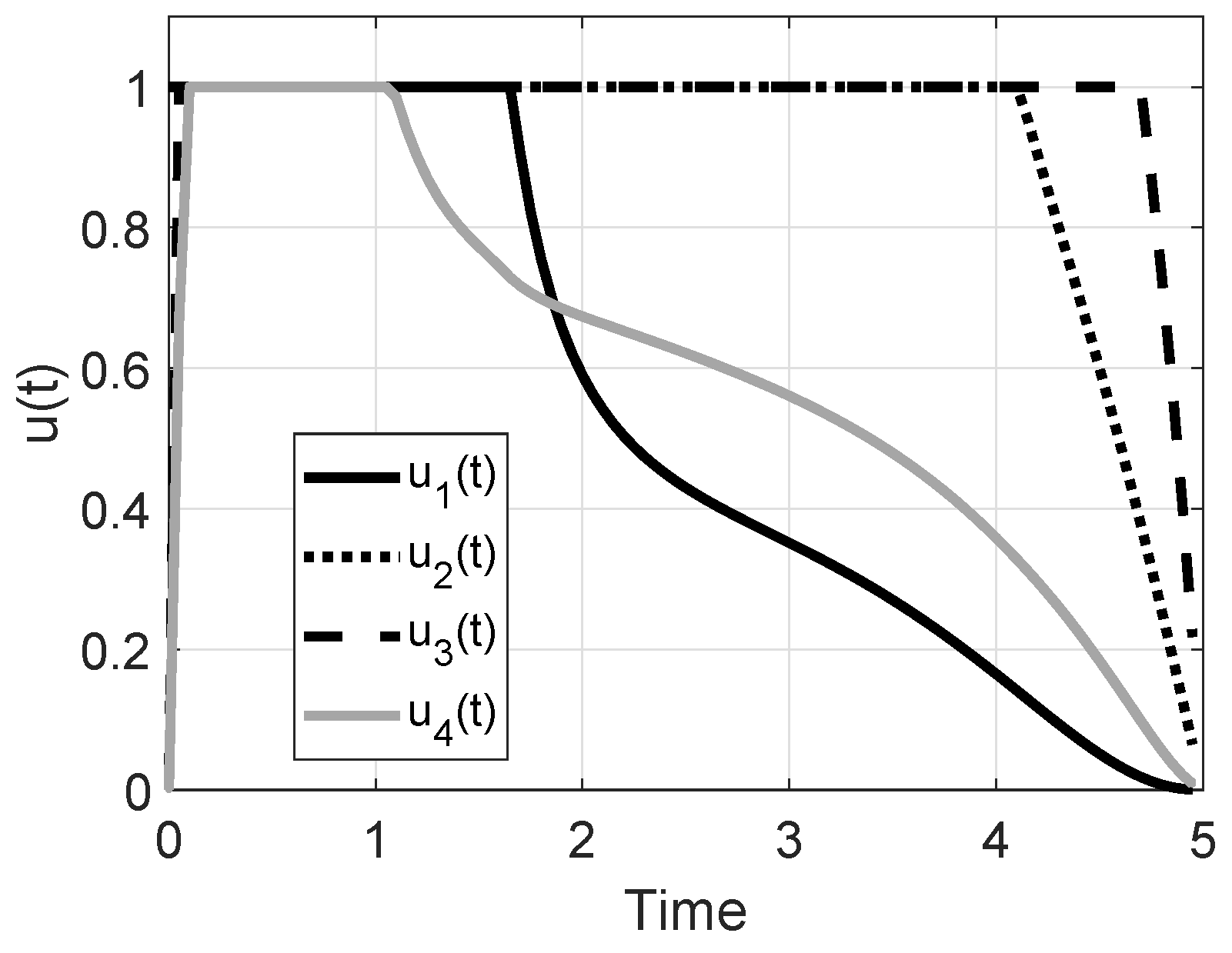
In
Case 2 a stronger control action is required than in
Case 1,
Figure 11: maximum effort of the vaccination up to almost 2 years, the therapy on the
subjects up to the fourth year and the therapy over the
subjects for almost all the control period. The control over the
subjects must be applied at its maximum value only for the first year, and then it decreases.
The effectiveness of the control procedure is evaluated also by considering the indicators V, , and E introduced; an efficient control would yield a strong decrease of dead patients (and therefore a negative V, as small as possible), a low control cost C, and also a low value of E.
In
Table 1 the sensible decrease of the number of dead patients is shown, once the control is applied; the cost is obviously higher in
Case 2, since the epidemic spread is more dangerous and thus requires a greater effort. As far as the
E parameter, it increases sensibly in
Case 2 with respect to
Case 1 since, as said, it is costlier than the control, and there are a higher the number of dead patients. Leaving
as in
Case 2, if a stronger weight is assigned to the vaccination
with respect to the other
, say
,
,
, the consequence is that the vaccination effort should be maximized more than the other controls aiming at the same goal; this condition is referred to as
Case 3 in
Table 1. Please note that to compensate for the smaller vaccination effort, the other controls must be increased. The symmetric situation is analyzed in Case 4, by assigning
,
,
; this means that the increase of the vaccination effort is allowed; the higher cost
, even if the global parameter
E slightly decreases can be noted, since costs
,
are lower.
As already noted, the proposed model introduces some innovation with respect to the one presented in [
19]; in particular, the possibility of spontaneous healing of
and
patients is allowed; in the considered
Cases 1–4 they have been fixed equal to
, of the same order of magnitude of the parameters for the mortality. If they are increased sensibly, for example up to 1, a strong capability of the patients in the
and
classes to recover is assumed; this could be the realistic situation of a population in a good general healthy condition. In this case, as denoted in
Case 5 and obtained with the other parameters as the ones in
Case 2, the very low value of the
E parameter can be noted, denoting a small number of dead people, as well as a decreased value of control costs. Moreover, all the cost efforts are decreased with respect to all the other cases, also compared to the
Case 1. The results of
Case 5 are shown in
Figure 12,
Figure 13,
Figure 14,
Figure 15,
Figure 16 and
Figure 17. It can be noted that the introduction of the optimal control strongly reduces the peaks of infections for the
and
patients with a lower value of all the costs with respect to the previously discussed cases. What is suggested in
Case 5 is the maximum effort for the controls
,
up to the first year for the vaccination and to the second year for the other two controls
and
. The therapy
does not reach the maximum effort allowed. This result must be compared with the corresponding one of
Figure 11 where a stronger effort is required for all the control period.
Case 5 highlights the obvious fact that if a population is in general good health conditions, usually related to economic and social wellness, it has stronger healing capability and it is less expensive to face an epidemic disease and its complications.
Finally, in the last row of
Table 1,
Case 6 is proposed, considering the same situation as
Case 2 but with the control effort not bounded, as in [
19]. Obviously, the possibility of using unbounded control allows r sensible reduction of the number of dead patients (
) but with a stronger control effort; in particular, the cost of the control
, the vaccination, is almost doubled, thus confirming the importance of a fast prevention action.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}