Mixed-Field Source Localization Based on the Non-Hermitian Matrix

Abstract
:1. Introduction
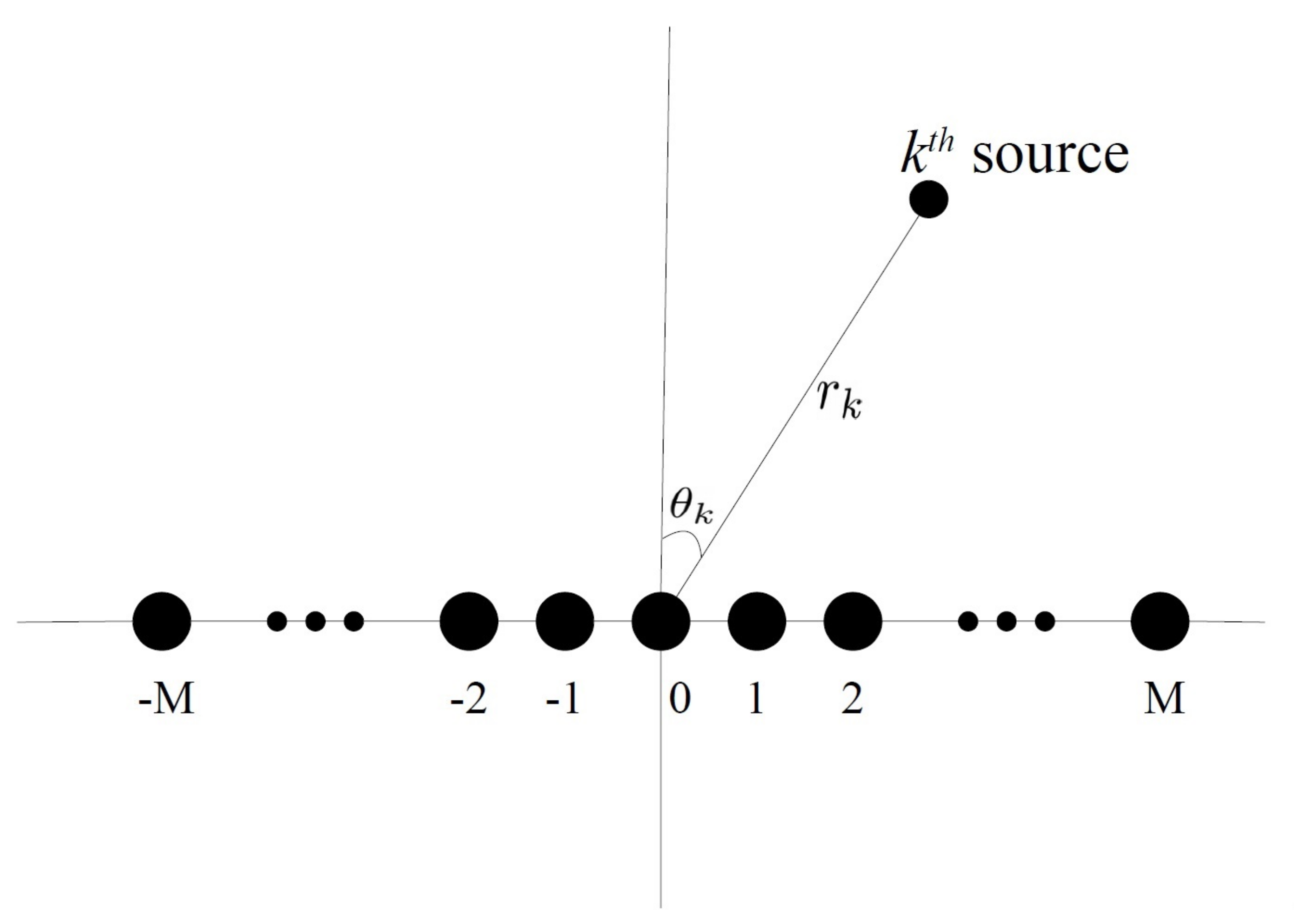
2. Signal Model
- (1)
- The kurtosis of the signal is non-zero.
- (2)
- The DOAs of all sources are different.
- (3)
- The source signals are independent of each other as well as of all the noise.
- (4)
- The number of the sensors is greater than that of the sources.
3. Proposed Scheme
3.1. DOA Estimation for Mixed-Field Sources
3.2. Range Estimation for Near-Field Sources
- Step 1:
- Construct the cumulant matrix .
- Step 2:
- Apply the EVD to .
- Step 3:
- Obtain orthogonal to .
- Step 4:
- Estimate the DOAs ().
- Step 5:
- Apply the Gram-Schmidt orthogonalization to .
- Step 6:
- By substituting the kth estimated DOA, estimate the kth range.
- Step 7:
- Repeat Step 5 until all the range estimates are all obtained.
3.3. Complexity Analyses
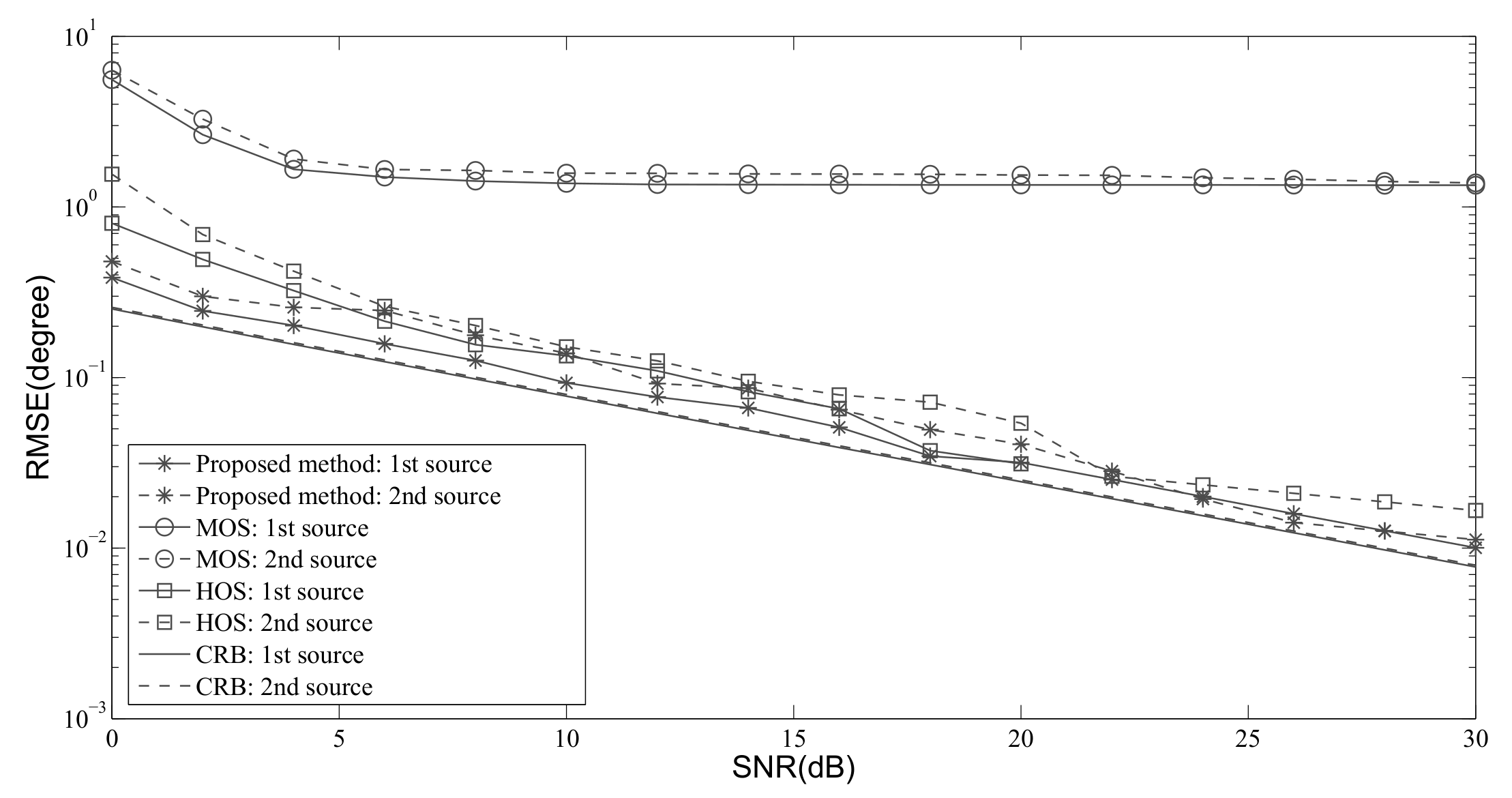
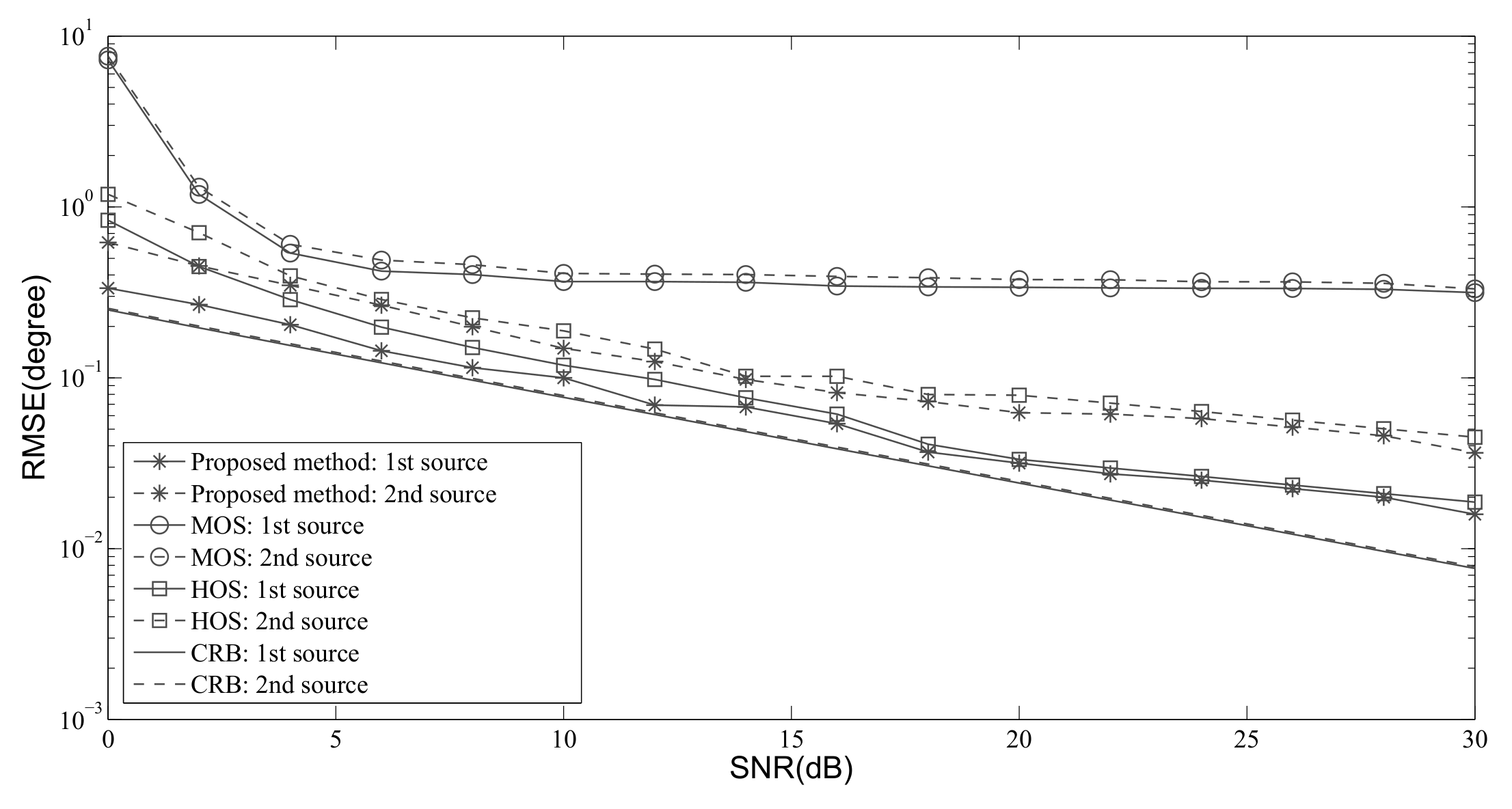
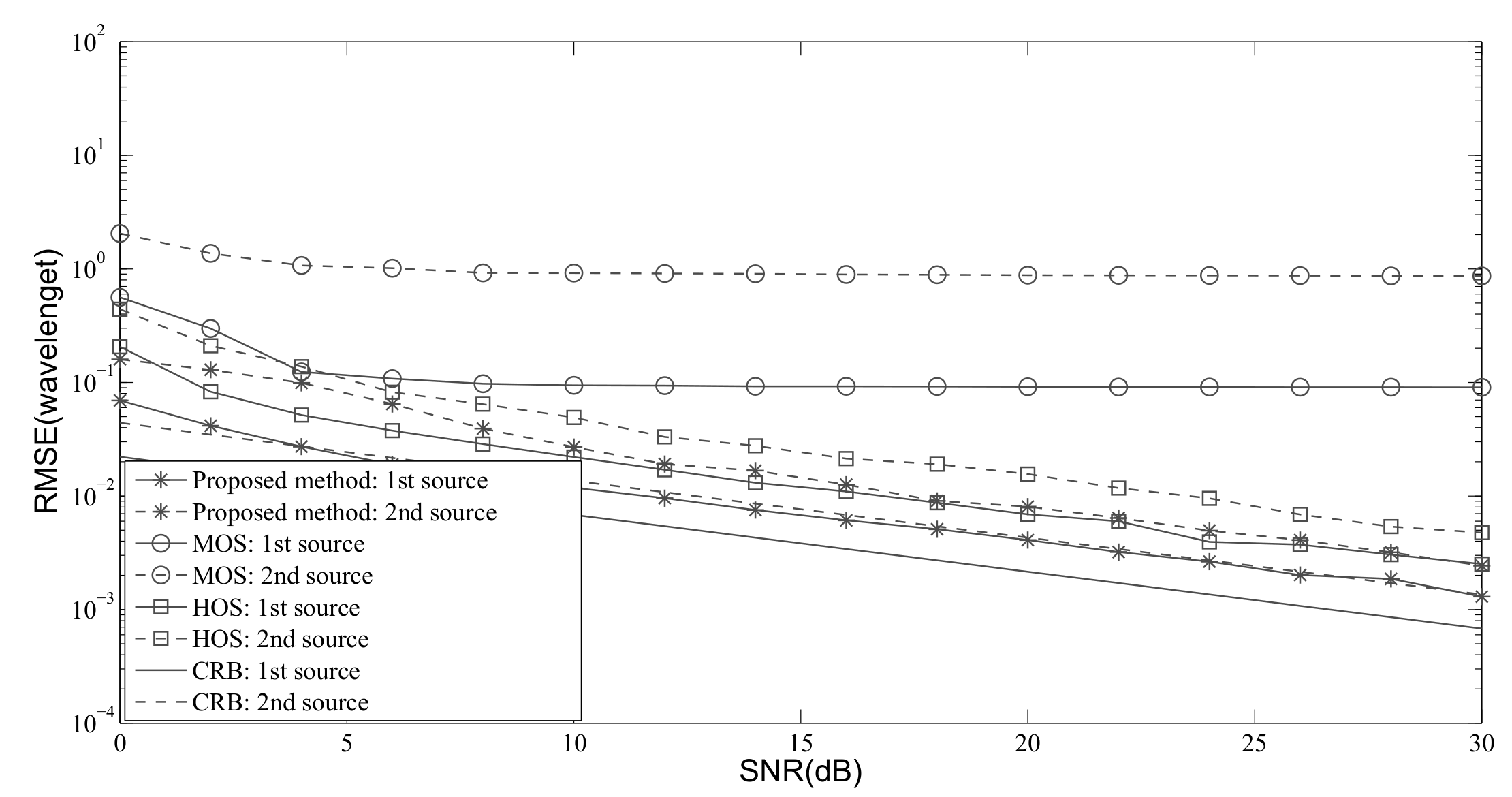
4. Simulation Results and Analysis
5. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
Abbreviations
| DOA | Direction of Arrival |
| 2D | Two-Dimension |
| MUSIC | MUltiple SIgnal Classification |
| ESPRIT | Estimation of Signal Parameters via Rotation Invariant Technique |
| EVD | EigenValue Decomposition |
| SVD | Singular Value Decomposition |
| ULA | Uniform Linear Array |
| SNR | Signal-to-Noise Ratio |
| RMSE | Root Mean Square Error |
| CRB | Cramer-Rao Bound |
References
- Yan, F.; Liu, S.; Wang, J.; Jin, M.; Shen, Y. Fast DOA estimation using co-prime array. Electron. Lett. 2018, 54, 409–410. [Google Scholar] [CrossRef]
- Hassan, T.U.; Gao, F.; Jalal, B.; Arif, S. Direction of Arrival Estimation Using Augmentation of Coprime Arrays. Information 2018, 9, 277. [Google Scholar] [CrossRef] [Green Version]
- Krim, H. Two decades of array signal processing research: The parametric approach. IEEE Signal Process. Mag. 1996, 13, 67–94. [Google Scholar] [CrossRef]
- Liu, A.; Yang, Q.; Zhang, X.; Deng, W. Modified root MUSIC for co-prime linear arrays. Electron. Lett. 2018, 54, 949–951. [Google Scholar] [CrossRef]
- Chen, S.; Dong, X.; Xing, G.; Peng, Z.; Zhang, W.; Meng, G. Separation of Overlapped Non-Stationary Signals by Ridge Path Regrouping and Intrinsic Chirp Component Decomposition. IEEE Sens. J. 2017, 17, 5994–6005. [Google Scholar] [CrossRef]
- Karim, A.M.; Hua, Y.B.; Adel, B. Second-Order Near-Field Source Localization: Algorithm And Performance Analysis. In Proceedings of the Conference Record of The Thirtieth Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, USA, 3–6 November 1996; pp. 723–727. [Google Scholar]
- Nobuyoshi, K.; Kensuke, T.; Kunio, S. Performance improvement of localization of radio sources by using spatial smoothing processing in near-field DOA-Matrix method with SAGE algorithm. In Proceedings of the 2017 IEEE MTT-S International Conference on Microwaves for Intelligent Mobility (ICMIM), Nagoya, Japan, 19–21 March 2017; pp. 127–130. [Google Scholar]
- Challa, R.N.; Shamsunder, S. High-order subspace-based algorithms for passive localization of near-field sources. In Proceedings of the Conference Record of the Twenty-Ninth Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, USA, 30 October–1 November 1995; pp. 777–781. [Google Scholar]
- Schmidt, R. Multiple emitter location and signal parameter estimation. IEEE Trans. Antennas Propag. 1986, 34, 276–280. [Google Scholar] [CrossRef] [Green Version]
- Roy, R.; Kailath, T. ESPRIT-estimation of signal parameters via rotational invariance techniques. IEEE Trans. Acoust. Speech Signal Process. 1989, 37, 984–995. [Google Scholar] [CrossRef] [Green Version]
- Friedlander, B. The root-MUSIC algorithm for direction finding with interpolated arrays. Signal Process. 1993, 30, 15–29. [Google Scholar] [CrossRef]
- Huang, Y.; Barkat, M. Near-field multiple source localization by passive sensor array. IEEE Trans. Antennas Propag. 1991, 39, 968–975. [Google Scholar] [CrossRef]
- Diao, M.; Miao, S. New method of parameter matching for 2-D ESPRIT algorithms. Syst. Eng. Electron. 2007, 29, 1226–1229. [Google Scholar]
- He, J.; Swamy, M.N.S.; Ahmad, M.O. Efficient application of MUSIC algorithm under the coexistence of far-field and near-field sources. IEEE Trans. Signal Process. 2012, 60, 2066–2070. [Google Scholar] [CrossRef]
- Zuo, W.; Xin, J.; Zheng, N.; Sano, A. Subspace-Based Localization of Far-Field and Near-Field Signals Without Eigendecomposition. IEEE Trans. Signal Process. 2018, 66, 4461–4476. [Google Scholar] [CrossRef]
- Liang, J.; Liu, D. Passive localization of mixed near-field and far-field sources using two-stage MUSIC algorithm. IEEE Trans. Signal Process. 2010, 58, 108–120. [Google Scholar] [CrossRef]
- Wang, B.; Zhao, Y.; Liu, J. Mixed-order MUSIC algorithm for localization of far-field and near-field sources. IEEE Signal Process. Lett. 2013, 20, 311–314. [Google Scholar] [CrossRef]
- Li, J.; Wang, Y.; Le Bastard, C.; Wei, G.; Ma, B.; Sun, M.; Yu, Z. Simplified High-order DOA and Range Estimation with Linear Antenna Array. IEEE Commun. Lett. 2017, 21, 76–79. [Google Scholar] [CrossRef]
- He, H.; Wang, Y.; Saillard, J. A high resolution method of source localization in near-field by using focusing technique. In Proceedings of the 2008 16th European Signal Processing Conference, Lausanne, Switzerland, 25–29 August 2008; pp. 1–5. [Google Scholar]
- Mendel, J.M. Tutorial on higher-order statistics (spectra) in signal processing and system theory: Theoretical results and some applications. Proc. IEEE 1991, 79, 278–305. [Google Scholar] [CrossRef]
- Dzielski, J.E.; Burkhardt, R.C.; Kotanchek, M.E. Comments on “Modified MUSIC algorithm for estimating DOA of signals”. Signal Process. 1996, 55, 253–254. [Google Scholar] [CrossRef]
- He, Z.; Li, Y.; Xiang, J. A modified root-music algorithm for signal doa estimation. J. Syst. Eng. Electron. 1999, 10, 42–47. [Google Scholar]
- Grosicki, E.; Abed-Meraim, K.; Hua, Y. A weighted linear prediction method for near-field source localization. IEEE Trans. Signal Process. 2005, 53, 3651–3660. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Proposed Method | MOS | HOS |
|---|---|---|---|
| Matrix construction | 1 | 2 | 2 |
| EVD | 1 | 2 | 2 |
| Gram-Schmidt orthogonalization | 1 | 0 | 0 |
| Methods | Proposed Method | HOS | MOS |
|---|---|---|---|
| Time (s) |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mo, M.; Sun, Z. Mixed-Field Source Localization Based on the Non-Hermitian Matrix. Information 2020, 11, 56. https://doi.org/10.3390/info11010056
Mo M, Sun Z. Mixed-Field Source Localization Based on the Non-Hermitian Matrix. Information. 2020; 11(1):56. https://doi.org/10.3390/info11010056
Chicago/Turabian StyleMo, Minggang, and Zhaowei Sun. 2020. "Mixed-Field Source Localization Based on the Non-Hermitian Matrix" Information 11, no. 1: 56. https://doi.org/10.3390/info11010056
APA StyleMo, M., & Sun, Z. (2020). Mixed-Field Source Localization Based on the Non-Hermitian Matrix. Information, 11(1), 56. https://doi.org/10.3390/info11010056