Repeated Usage of an L3 Motorway Chauffeur: Change of Evaluation and Usage

Abstract
:1. Introduction
1.1. Behavioural Adaptation
- Perceptive changes (seeing, hearing, feeling).
- Cognitive changes (comprehending, interpreting, prioritizing, selecting, deciding).
- Performance changes (driving, system handling, error).
- Driver state changes (attentiveness/awareness, workload, stress, drowsiness).
- Attitudinal changes (acceptance, rejection, overreliance, mistrust).
- Changes in the adaptation to environmental conditions (weather, visibility, etc.).
1.2. Usage and Evaluation of ADS
1.3. Change with Repeated Usage
- First encounter: First day (1–6 h).
- Learning: 3–4 weeks.
- Trust: 1–6 months.
- Adjustment: 6–12 months.
- Readjustment: 1–2 years.
1.4. Objective
- Attitudinal changes, that is the change of e.g., acceptance and trust measured via questionnaires.
- Cognitive changes, that is the change of prioritizing and selecting side tasks, measured via indicators derived from driver behaviour and via questionnaires.
- Driver state changes, that is the change of attentiveness/awareness, stress, drowsiness, measured via objective indicators and via questionnaires.
- Performance changes, that is the change of system handling in take-over situations measured via objective indicators and via questionnaires.
2. Materials and Methods
2.1. System Implementation
- The implemented L3ADS had a speed range of 0 to 130 km/h. The system adopted the driven speed to the surrounding traffic as well as to speed limits along the road. This means that the system set the maximum speed situationally adapted based on the current speed limit and in sections with no speed limit, the system kept a maximum speed of 130 km/h. In case a lead vehicle was present, the system obtained a safe distance to the lead vehicle and adjusted speed accordingly. The regulation of speed and distance was based on a standard ACC-controller implemented in SILAB®.
- The system was able to execute lane changes automatically. Lane changes to the left were initiated when a slower vehicle was detected on the own lane and the adjacent lane on the left was free. The vehicle changed lanes back as soon as slower vehicles were passed and the lane to the right was free again. For decisions on lane changes, a simple controller was used that was tuned in a way that in the implemented experimental drives the behaviour of the ADS seemed reasonable and felt smooth. The trajectory during a lane change was defined such that the lane change itself felt smooth; the trajectory was not situationally adapted.
- The following situations were outside the ODD and therefore led to a TOR: highway exits and entries, construction sites, adverse weather conditions (i.e., heavy rain) and missing lane markings.
- All TORs were issued with a time budget of 15 s (based on take-over times of functions tested in on-road tests in L3Pilot [23]). Although not mandatory for L3-functions, a safe stop manoeuvre was performed in case the driver did not take control back during the take-over time.
2.2. Test Scenarios
2.3. Data Logging
- Signals from the driving simulator software that cover the areas of vehicle dynamics (v, ax, ay), state of the L3-system (TORs, system status), vehicle handling (brake pedal position, steering angle, hands-on detection) and vehicle environment (distance to other vehicles, lane position).
- Continuous video recording of the driver and the driving scenery.
- Continuous coding by the experimenter whether participants were engaged in NDRAs, whether the NDRA involved the hands (manual distraction, e.g., through browsing on a smartphone, holding food) and whether drivers closed their eyes for a longer time.
- Gaze and head direction, as well as eyelid-opening level, were logged with the 3-camera gaze tracker Smart Eye Pro® (SmartEye; Gothenburg, Sweden).
2.4. Procedure
2.5. Sample
2.6. Data Analysis
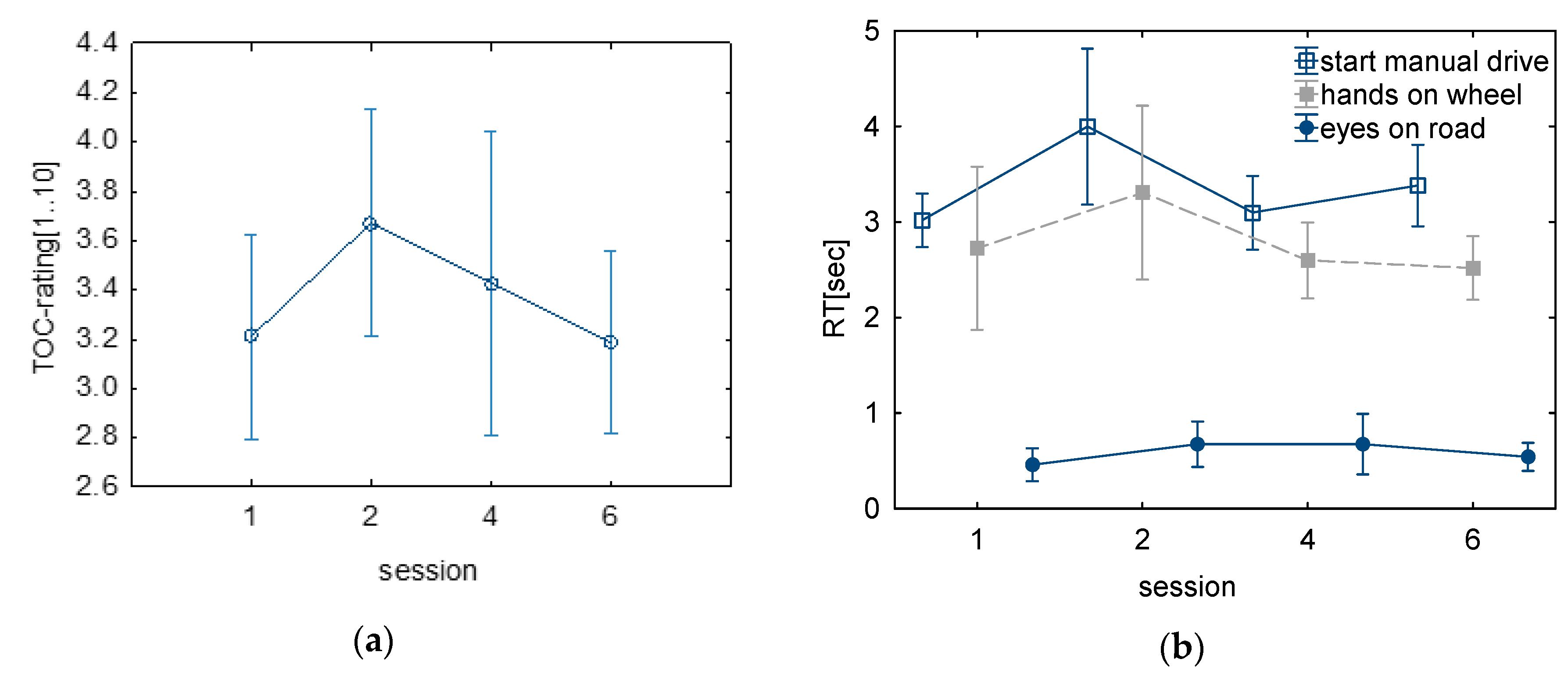
- Reaction times are calculated that are defined as the duration between the start of the TOR and the first time point the analysed driver reaction was observed (eyes on road, hands on the steering wheel and deactivation of the AD).
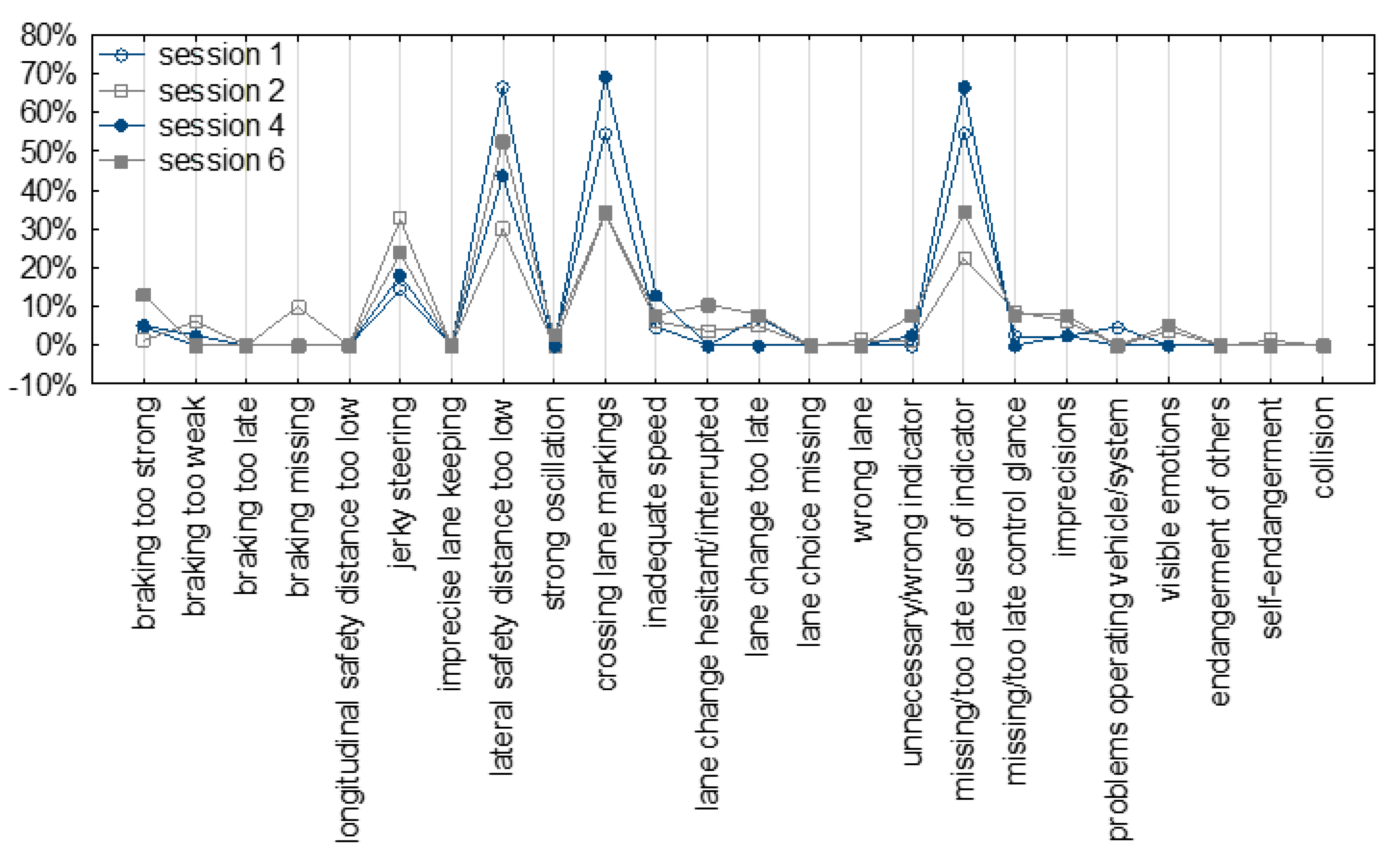
- Expert rating of takeover performance based on the video. For that the take-over controllability (TOC) rating was performed ([27], for more details see https://toc-rating.de/en/) which defines a standardized procedure for the evaluation of take-over situations. Relevant dimensions for evaluation are provided with defined criteria for the different rating categories. In the end, a final rating is given on a 10-point scale which corresponds to the categories shown in Table 4. Besides the overall rating, detailed information on the observed error types is provided by the method.
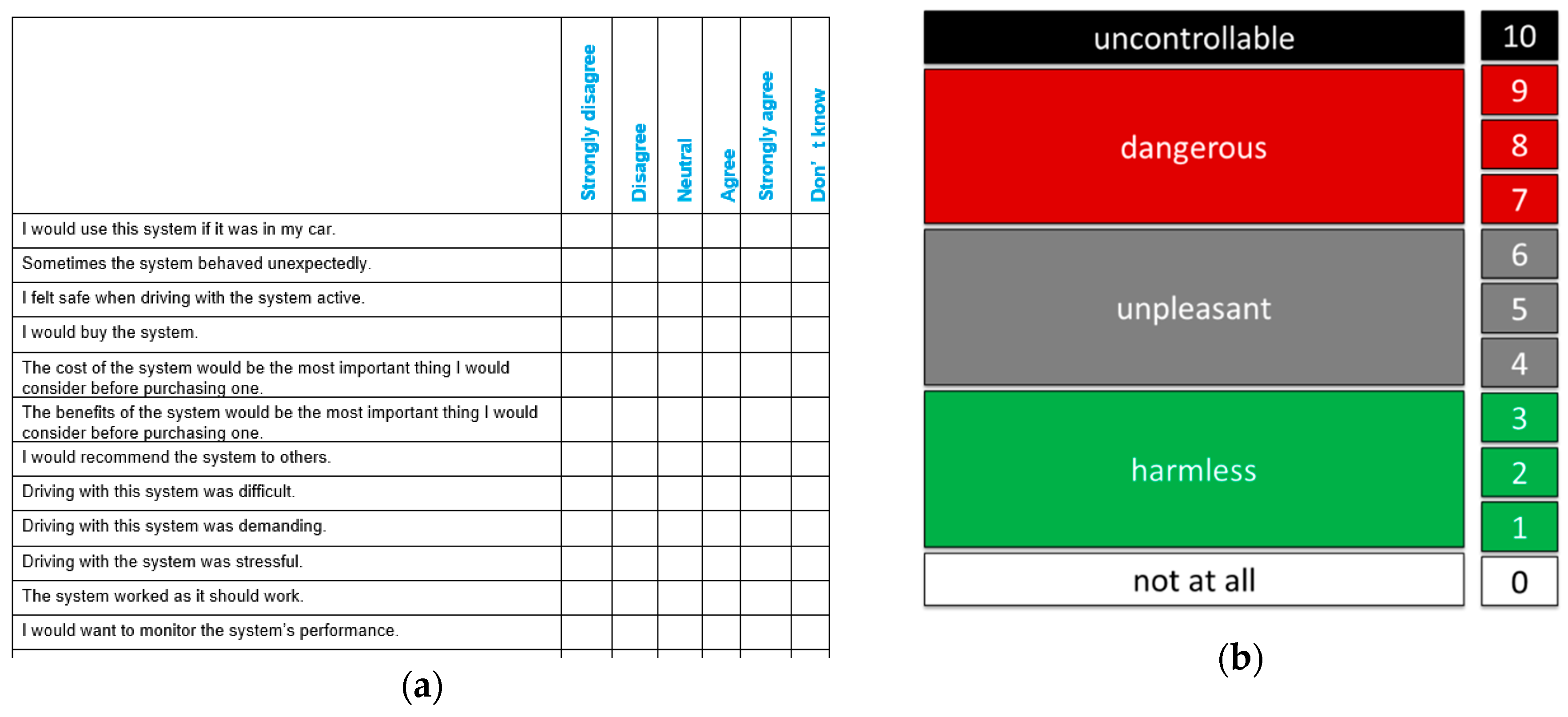
- Agreement with various statements regarding the evaluation of the L3ADS, derived from post-drive questionnaires (see [24]).
- Subjective change of alertness over the drives measured with the Karolinska Sleepiness Scale (KSS, [28]) directly before and after the drives.
- The proportion of time the L3ADS was activated [%] in relation to the time it was available, derived from signals logged in SILAB®.
- The proportion of time with active L3ADS spent on NDRAs [%] and proportion of time with active L3ADS spent on NDRAs with active involvement of the hands [%], derived from table application.
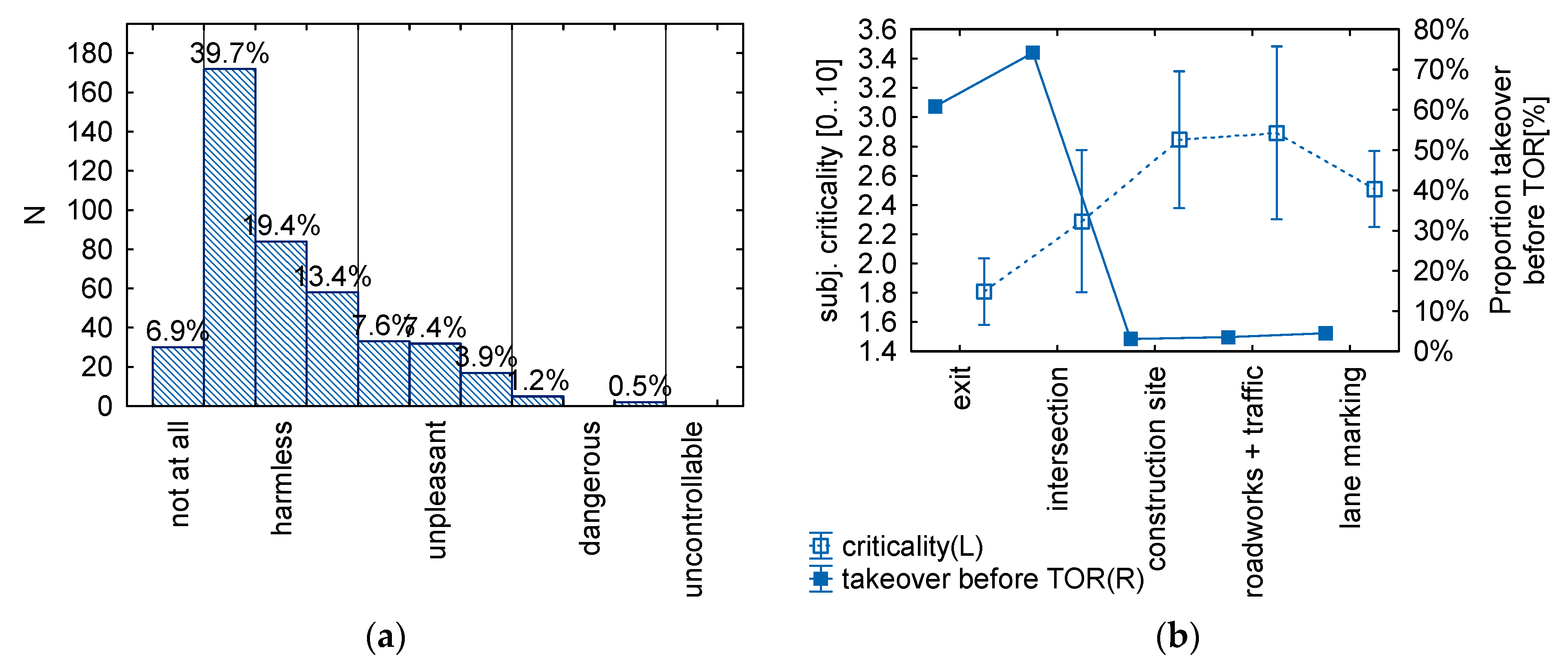
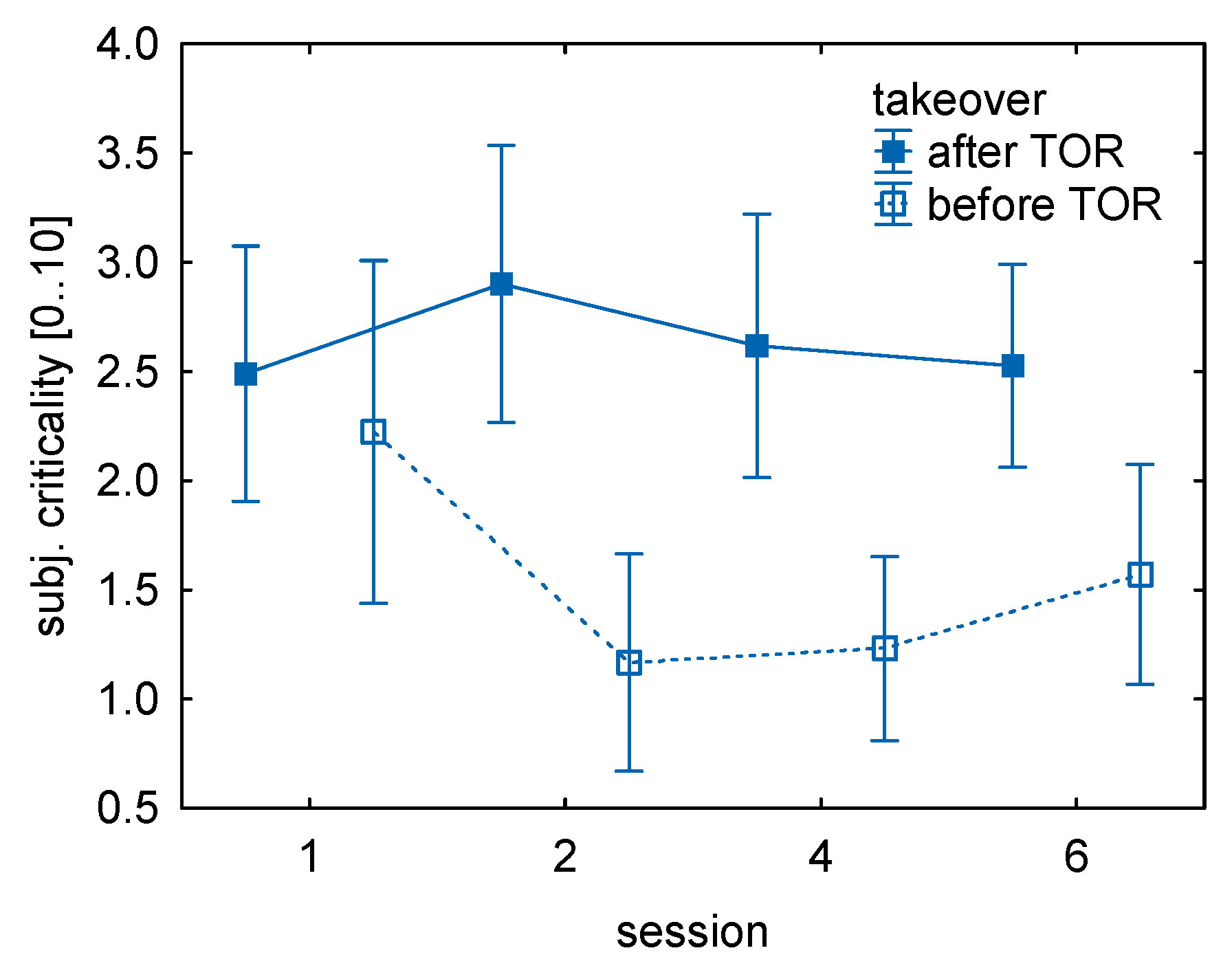
- Subjective criticality of an experienced take-over situation (see [30]).
- Reaction times after a TOR occurred until eyes were on the road, hands on the steering wheel and until control was taken back (ADS deactivated) (sec) (see [30]).
- TOC rating measuring overall take over performance [27].
3. Results
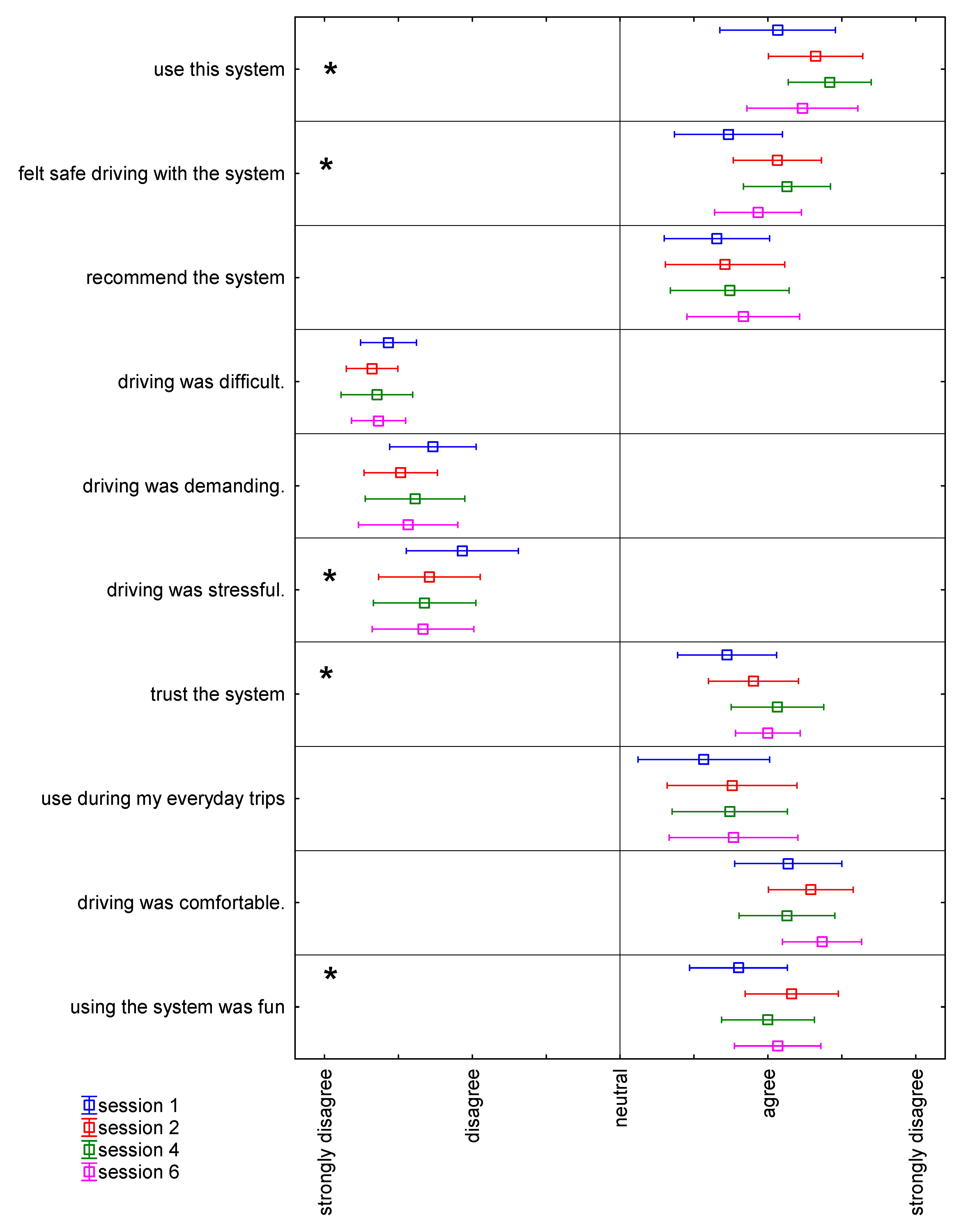
3.1. Evaluation of the L3 Motorway ADS
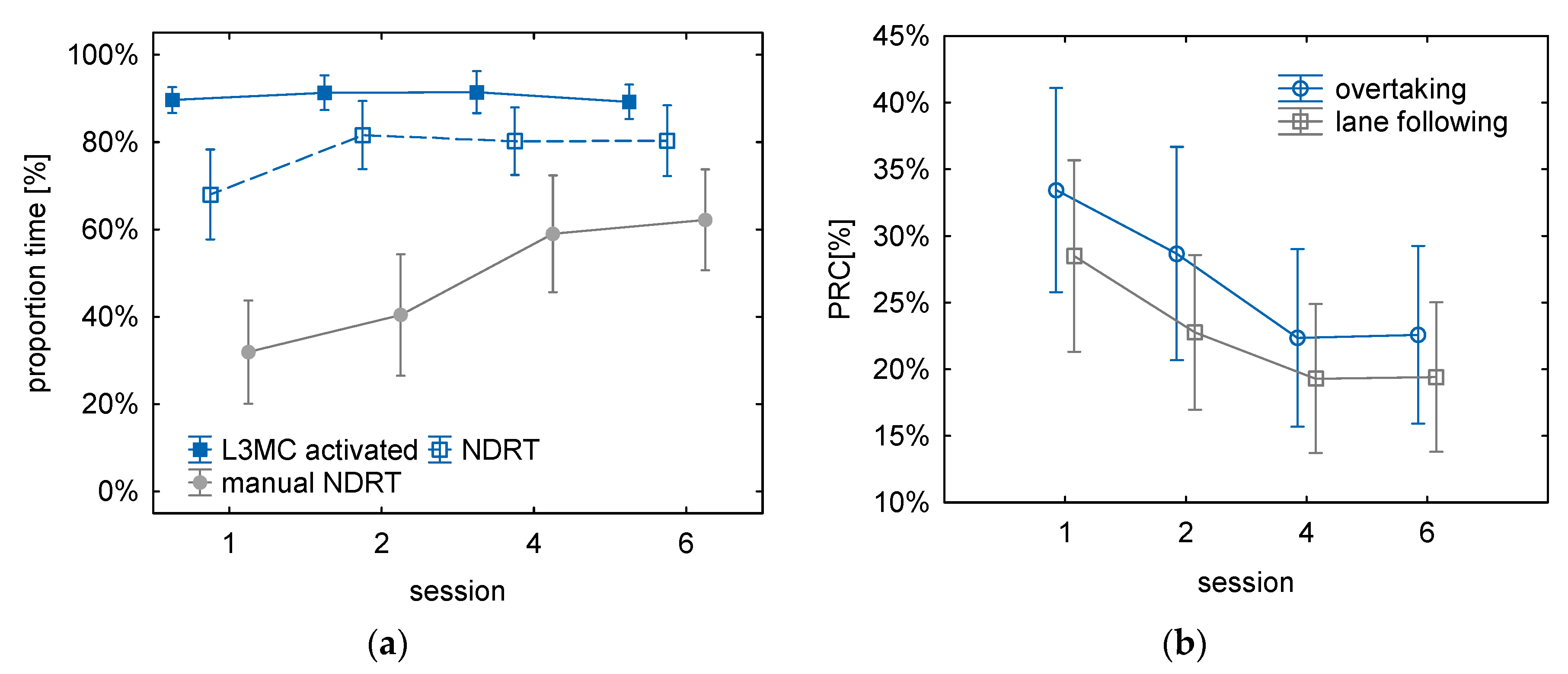
3.2. Usage of L3 Motorway ADS
3.3. Driver State with L3 Motorway ADS
3.4. Take-Over Situations
4. Discussion
- With repeated usage, drivers trust the function more and feel safer and less stressed.
- With repeated usage, drivers spent more time with the function active on NDRAs, especially on tasks that involve both hands.
- With repeated usage, drivers feel less the need to monitor the system and they direct less attention to the road.
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- SAE. Taxonomy and Definitions for Terms Related to on-Road Motor Vehicle Automated Driving Systems; Society of Automotive Engineers: Warrendale, PA, USA, 2018; Volume 3016, pp. 1–16. [Google Scholar]
- Kyriakidis, M.; de Winter, J.C.; Stanton, N.; Bellet, T.; van Arem, B.; Brookhuis, K.; Martens, M.H.; Bengler, K.; Andersson, J.; Merat, N.; et al. A human factors perspective on automated driving. Theor. Issues Ergon. Sci. 2019, 10, 223–249. [Google Scholar] [CrossRef]
- OECD. Behavioural Adaptations to Changes in the Road Transport System 1990; Organisation for Economic Co-Operation and Development: Paris, France, 1990. [Google Scholar]
- Peltzman, S. The effects of automobile safety regulation. J. Political Econ. 1975, 83, 677–725. [Google Scholar] [CrossRef]
- Wilde, G.J. The theory of risk homeostasis: Implications for safety and health. Risk Anal. 1982, 2, 209–225. [Google Scholar] [CrossRef]
- Hollnagel, E.; Nåbo, A.; Lau, I.V. A systemic model for driver-in-control. In Proceedings of the Second International Driving Symposium on Human Factors in Driver Assessment, Training and Vehicle Design, Park City, UT, USA, 21–24 July 2003. [Google Scholar]
- Rudin-Brown, C.M.; Parker, H.A. Behavioural adaptation to adaptive cruise control (ACC): Implications for preventive strategies. Transp. Res. F 2004, 7, 59–76. [Google Scholar] [CrossRef]
- Dikmen, M.; Burns, C. Trust in autonomous vehicles: The case of Tesla Autopilot and Summon. In Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics (SMC), Banff, AB, Canada, 5–8 October 2017. [Google Scholar]
- Gold, C.; Körber, M.; Hohenberger, C.; Lechner, D.; Bengler, K. Trust in automation–Before and after the experience of take-over scenarios in a highly automated vehicle. Procedia Manuf. 2015, 3, 3025–3032. [Google Scholar] [CrossRef]
- Naujoks, F.; Totzke, I. Behavioral adaptation caused by predictive warning systems—The case of congestion tail warnings. Transp. Res. F Traffic Psychol. Behav. 2014, 26, 49–61. [Google Scholar] [CrossRef]
- Jamson, H.; Merat, N.; Carsten, O.M.; Lai, F.C. Behavioural changes in drivers experiencing highly-automated vehicle control in varying traffic conditions. Transp. Res. C 2013, 30, 116–125. [Google Scholar] [CrossRef] [Green Version]
- Martens, M.H.; Jenssen, G.D. Behavioral adaptation and acceptance. In Handbook of Intelligent Vehicles; Springer: New York, NY, USA, 2012; pp. 117–138. [Google Scholar]
- Parasuraman, R.; Riley, V. Humans and automation: Use, misuse, disuse, abuse. Hum. Factors 1997, 39, 230–253. [Google Scholar] [CrossRef]
- Naujoks, F.; Wiedemann, K.; Schömig, N. The importance of interruption management for usefulness and acceptance of automated driving. In Proceedings of the 9th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Oldenburg, Germany, 24–27 September 2017. [Google Scholar]
- Kyriakidis, M.; Happee, R.; de Winter, J.C. Public opinion on automated driving: Results of an international questionnaire among 5000 respondents. Transp. Res. F 2015, 32, 127–140. [Google Scholar] [CrossRef]
- Vogelpohl, T.; Kühn, M.; Hummel, T.; Vollrath, M. Asleep at the automated wheel—Sleepiness and fatigue during highly automated driving. Accid. Anal. Prev. 2018, 126, 70–84. [Google Scholar] [CrossRef]
- Saad, F.; Hjälmdahl, M.; Cañas, J.; Alonso, M.; Garayo, P.; Macchi, L.; Nathan, F.; Ojeda, L.; Papakostopoulos, V.; Panou, M.; et al. Literature Review of Behavioural Effects; AIDE deliverable D1. 2.1 2004; Information Society Technologies: Brussels, Belgium, 2004. [Google Scholar]
- Patten, C.J. Behavioural adaptation to in-vehicle intelligent transport systems. In Behavioural Adaptation and Road Safety: Theory, Evidence and Action; CRC Press: Boca Raton, FL, USA, 2013; pp. 161–176. [Google Scholar]
- Ajzen, I. Perceived behavioral control, self-efficacy, locus of control, and the theory of planned behavior 1. J. Appl. Soc. Psychol. 2002, 32, 665–683. [Google Scholar] [CrossRef]
- Muir, B.M. Trust between humans and machines, and the design of decision aids. Int. J. ManMach. Stud. 1987, 27, 527–539. [Google Scholar] [CrossRef]
- Large, D.R.; Burnett, G.; Morris, A.; Muthumani, A.; Matthias, R. A Longitudinal Simulator Study to Explore Drivers’ Behaviour during Highly-Automated Driving. In Proceedings of the International Conference on Applied Human Factors and Ergonomics, Los Angeles, CA, USA, 17–21 July 2017. [Google Scholar]
- Straßenverkehrsgesetz 2018, §1b Rechte und Pflichten des Fahrzeugführers bei Nutzung hoch- und vollautomatisierter Fahrfunktionen, (Germany). Available online: https://www.gesetze-im-internet.de/stvg/StVG.pdf (accessed on 3 October 2019).
- Griffin, T.; Sauvaget, J.-L.; Geronimi, S.; Bolovinou, A.; Brouwer, T. Deliverable D4.1—Description and Taxonomy of Automated Driving Functions. Deliverable D3.3 of L3Pilot Project. 2019. Available online: https://l3pilot.eu/fileadmin/user_upload/Downloads/Deliverables/L3Pilot-SP4-D4.1-Description_and_taxonomy_of_AD_functions-v2.0_for_website.pdf (accessed on 17 February 2020).
- Metz, B.; Rösener, C.; Louw, T.; Aitoniemi, E.; Bjorvatn, A.; Wörle, J.; Weber, H.; Torrao, G.A.; Silla, A.; Malin, F.; et al. Deliverable D3.3—Evaluation Methods; Deliverable D3.3 of L3Pilot Project. 2019. Available online: https://l3pilot.eu/fileadmin/user_upload/L3Pilot-SP3-D3.3_Evaluation_Methods-v1.0_DRAFT_for_website.pdf (accessed on 3 October 2019).
- Van der Laan, J.D.; Heino, A.; De Waard, D. A simple procedure for the assessment of acceptance of advanced transport telematics. Transp. Res. C 1997, 5, 1–10. [Google Scholar] [CrossRef]
- Neukum, A.; Lübbeke, T.; Krüger, H.-P.; Mayser, C.; Steinle, J. ACC-Stop&Go: Fahrerverhalten an funktionalen Systemgrenzen. In 5 Workshop Fahrerassistenzsysteme—FAS 2008; Maurer, M., Stiller, C., Eds.; Fmrt: Karlsruhe, Germany, 2008; pp. 141–150. [Google Scholar]
- Naujoks, F.; Wiedemann, K.; Schömig, N.; Jarosch, O.; Gold, C. Expert-based controllability assessment of control transitions from automated to manual driving. MethodsX 2018, 5, 579–592. [Google Scholar] [CrossRef] [PubMed]
- Akerstedt, T.; Anund, A.; Axelsson, J.; Kecklund, G. Subjective sleepiness is a sensitive indicator of insufficient sleep and impaired waking function. J. Sleep Res. 2014, 23, 240–252. [Google Scholar] [CrossRef] [PubMed]
- Wiedemann, K.; Naujoks, F.; Wörle, J.; Kenntner-Mabiala, R.; Kaussner, Y.; Neukum, A. Effect of different alcohol levels on take-over performance in conditionally automated driving. Accid. Anal. Prev. 2018, 115, 89–97. [Google Scholar] [CrossRef] [PubMed]
- Victor, T. Keeping Eye and Mind on the Road. Ph.D. Thesis, Universitet Uppsala, Uppsala, Sweden, 2005. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Drive | Driving in ODD | Driving Outside ODD | Reasons for Take-Over Requests |
|---|---|---|---|
| Drive 1 | section with low traffic density and changing speed limit traffic jam | On parking area In motorway junction | 1 × before highway intersection 1 × before exit 1 × bad lane markings |
| Drive 2 | section with low traffic density and changing speed limit traffic jam | On parking area In construction site | 1 × construction site 1 × exit 2 × bad lane markings |
| Drive 3 | section with low traffic density and changing speed limit traffic jam | On parking area | 1 × exit 1 × before moving roadworks (+traffic) |
| Drive 4 | section with low traffic density and changing speed limit | On parking area In motorway junction In construction site | 1 × construction site 1 × highway junction 1 × before exit 2 × bad lane markings |
| Drive 5 | section with low traffic density and changing speed limit | On parking area In heavy rain | 1 × exit 1 × moving roadworks 1 × heavy rain |
| Drive 6 | section with low traffic density and changing speed limit | On parking area In heavy rain | 1 × exit 1 × moving roadworks 1 × heavy rain |
| Takeover Scenario | Drivers’ Task | Occurrence in Drives | Speed | |
|---|---|---|---|---|
| Before TOR | During Situation | |||
| Highway intersection | Take driving task back Follow direction signs through intersection Two-lane changes are required for right way | 1,3 | 120 km/h | Situationally adapted through intersection |
| Exit | Take driving task back Take exit lane Stop vehicle in car park | 1,2,3,4 | 120 km/h | Situationally adapted on exit lane |
| Bad lane markings | Take driving task back Stay on lane through the section with bad lane marking (no traffic, no curvature) | 1,2,4 | 120 km/h | 80 km/h |
| Construction site | Take driving task back Slow down Drive through construction site | 2,4 | 120 km/h | 80 km/h |
| Roadworks + traffic | Take driving task back Check driving environment Change unto unblocked lane while taking rear traffic into account | 3 | 120 km/h | 120 km/h |
| Session | Content |
|---|---|
| Session 1—introductory session 90 min | Information on experiment and planned schedule Informed Consent Handing out of Pilot site questionnaire part 1 Introductory drive (10 min) Drive 1 (30 min) Post drive questionnaire (full version) |
| Session 2 45 min | Short pre-drive questionnaire Drive 2, Drive 3 or Drive 4 (30 min) Post drive questionnaire (short version) |
| Session 3 2 h 30 min | Short pre-drive questionnaire Drive 5 or Drive 6 (2 h) Post drive questionnaire (short version) |
| Session 4 45 min | Short pre-drive questionnaire Drive 2, Drive 3 or Drive 4 (30 min) Post drive questionnaire (short version) |
| Session 5 2 h 30 min | Short pre-drive questionnaire Drive 5 or Drive 6 (2 h) Post drive questionnaire (short version) |
| Session 6 90 min | Short pre-drive questionnaire Drive 2, Drive 3 or Drive 4 (30 min) Post drive questionnaire (full version) |
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| Perfect | Good with imperfections | Reduced performance with driving errors | Endangerment, critical situations | Uncontrollable | |||||
| Item | Session | m | sd | N | t | df | p |
|---|---|---|---|---|---|---|---|
| driving was comfortable | 1 | 2.138 | 0.953 | 29 | 6.43 | 28 | 0.0000 |
| 6 | 2.367 | 0.718 | 30 | 10.42 | 29 | 0.0000 | |
| driving was demanding | 1 | −0.267 | 0.785 | 30 | −8.84 | 29 | 0.0000 |
| 6 | −0.433 | 0.898 | 30 | −8.75 | 29 | 0.0000 | |
| driving was difficult | 1 | −0.567 | 0.504 | 30 | −17.03 | 29 | 0.0000 |
| 6 | −0.633 | 0.490 | 30 | −18.25 | 29 | 0.0000 | |
| driving was stressful | 1 | −0.067 | 1.015 | 30 | −5.76 | 29 | 0.0000 |
| 6 | −0.333 | 0.922 | 30 | −7.92 | 29 | 0.0000 | |
| felt safe driving with the system | 1 | 1.733 | 0.980 | 30 | 4.10 | 29 | 0.0003 |
| 6 | 1.933 | 0.785 | 30 | 6.51 | 29 | 0.0000 | |
| recommend the system | 1 | 1.655 | 0.936 | 29 | 3.77 | 28 | 0.0008 |
| 6 | 1.833 | 1.020 | 30 | 4.48 | 29 | 0.0001 | |
| trust the system | 1 | 1.724 | 0.882 | 29 | 4.42 | 28 | 0.0001 |
| 6 | 2.000 | 0.587 | 30 | 9.33 | 29 | 0.0000 | |
| use during my everyday trips | 1 | 1.567 | 1.194 | 30 | 2.60 | 29 | 0.0146 |
| 6 | 1.767 | 1.165 | 30 | 3.60 | 29 | 0.0012 | |
| use this system | 1 | 2.067 | 1.048 | 30 | 5.57 | 29 | 0.0000 |
| 6 | 2.233 | 1.006 | 30 | 6.71 | 29 | 0.0000 | |
| using the system was fun | 1 | 1.800 | 0.887 | 30 | 4.94 | 29 | 0.0000 |
| 6 | 2.067 | 0.785 | 30 | 7.44 | 29 | 0.0000 | |
| driving would make me tired | 1 | 1.821 | 1.124 | 28 | 3.87 | 27 | 0.0006 |
| 6 | 1.767 | 1.223 | 30 | 3.43 | 29 | 0.0018 | |
| use the time to do other activities | 1 | 2.069 | 0.998 | 29 | 5.77 | 28 | 0.0000 |
| 6 | 2.500 | 0.682 | 30 | 12.04 | 29 | 0.0000 | |
| want to monitor the system’s performance | 1 | 1.600 | 0.932 | 30 | 3.53 | 29 | 0.0014 |
| 6 | 1.400 | 1.192 | 30 | 1.84 | 29 | 0.0763 | |
| monitored environment more | 1 | 0.800 | 1.424 | 30 | −0.77 | 29 | 0.4479 |
| 6 | 0.067 | 1.311 | 30 | −3.90 | 29 | 0.0005 | |
| more aware of hazards | 1 | 0.000 | 0.910 | 30 | −6.02 | 29 | 0.0000 |
| 6 | −0.233 | 0.971 | 30 | −6.95 | 29 | 0.0000 | |
| obvious why takeover requests occurred | 1 | 2.733 | 0.521 | 30 | 18.23 | 29 | 0.0000 |
| 6 | 2.625 | 0.576 | 24 | 13.83 | 23 | 0.0000 | |
| during takeovers I felt safe | 1 | 2.167 | 0.986 | 30 | 6.48 | 29 | 0.0000 |
| 6 | 2.208 | 0.833 | 24 | 7.11 | 23 | 0.0000 | |
| takeovers warned appropriately | 1 | 2.467 | 0.629 | 30 | 12.78 | 29 | 0.0000 |
| 6 | 2.542 | 0.509 | 24 | 14.84 | 23 | 0.0000 | |
| takeovers were with sufficient time | 1 | 2.333 | 0.758 | 30 | 9.63 | 29 | 0.0000 |
| 6 | 2.167 | 0.868 | 24 | 6.58 | 23 | 0.0000 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Metz, B.; Wörle, J.; Hanig, M.; Schmitt, M.; Lutz, A. Repeated Usage of an L3 Motorway Chauffeur: Change of Evaluation and Usage. Information 2020, 11, 114. https://doi.org/10.3390/info11020114
Metz B, Wörle J, Hanig M, Schmitt M, Lutz A. Repeated Usage of an L3 Motorway Chauffeur: Change of Evaluation and Usage. Information. 2020; 11(2):114. https://doi.org/10.3390/info11020114
Chicago/Turabian StyleMetz, Barbara, Johanna Wörle, Michael Hanig, Marcus Schmitt, and Aaron Lutz. 2020. "Repeated Usage of an L3 Motorway Chauffeur: Change of Evaluation and Usage" Information 11, no. 2: 114. https://doi.org/10.3390/info11020114
APA StyleMetz, B., Wörle, J., Hanig, M., Schmitt, M., & Lutz, A. (2020). Repeated Usage of an L3 Motorway Chauffeur: Change of Evaluation and Usage. Information, 11(2), 114. https://doi.org/10.3390/info11020114