Do Not Let the Robot Get too Close: Investigating the Shape and Size of Shared Interaction Space for Two People in a Conversation


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
1.1. Robot Navigation and Evaluation
1.2. Interactions Involving Multiple People
1.3. Human Formation Patterns
1.4. Research Aims
2. Study 1
2.1. Method
2.1.1. Participants and Design
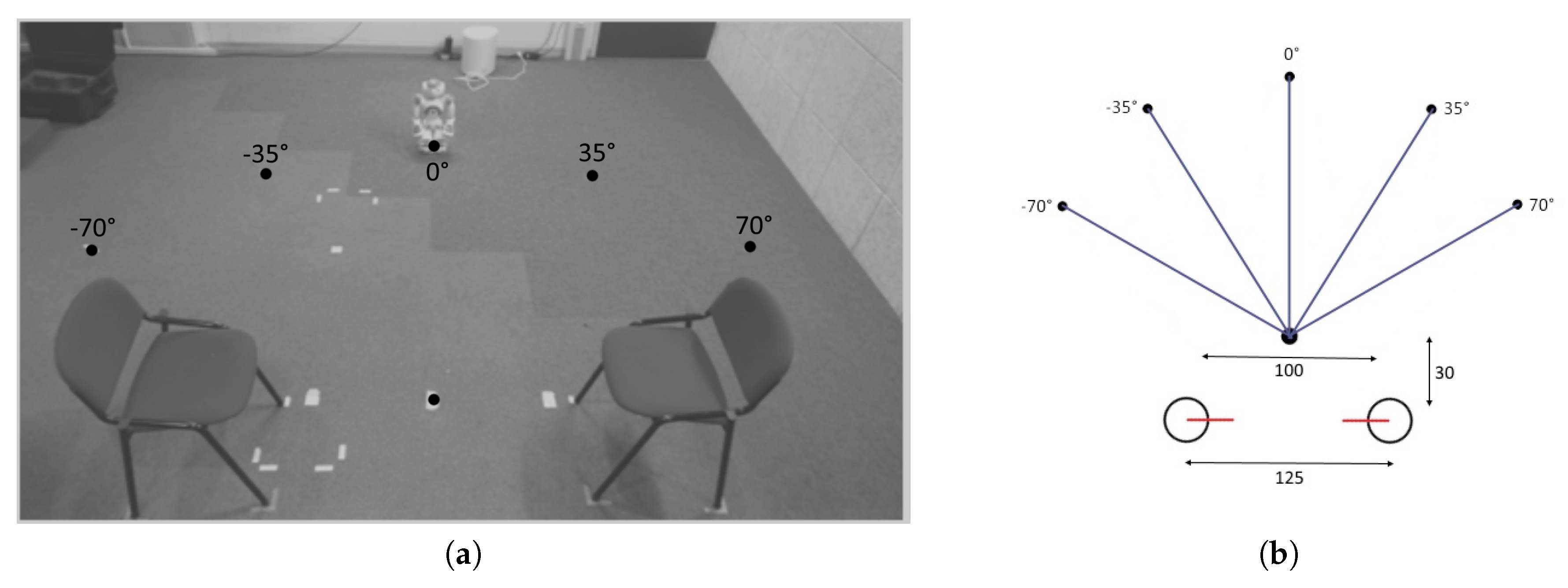
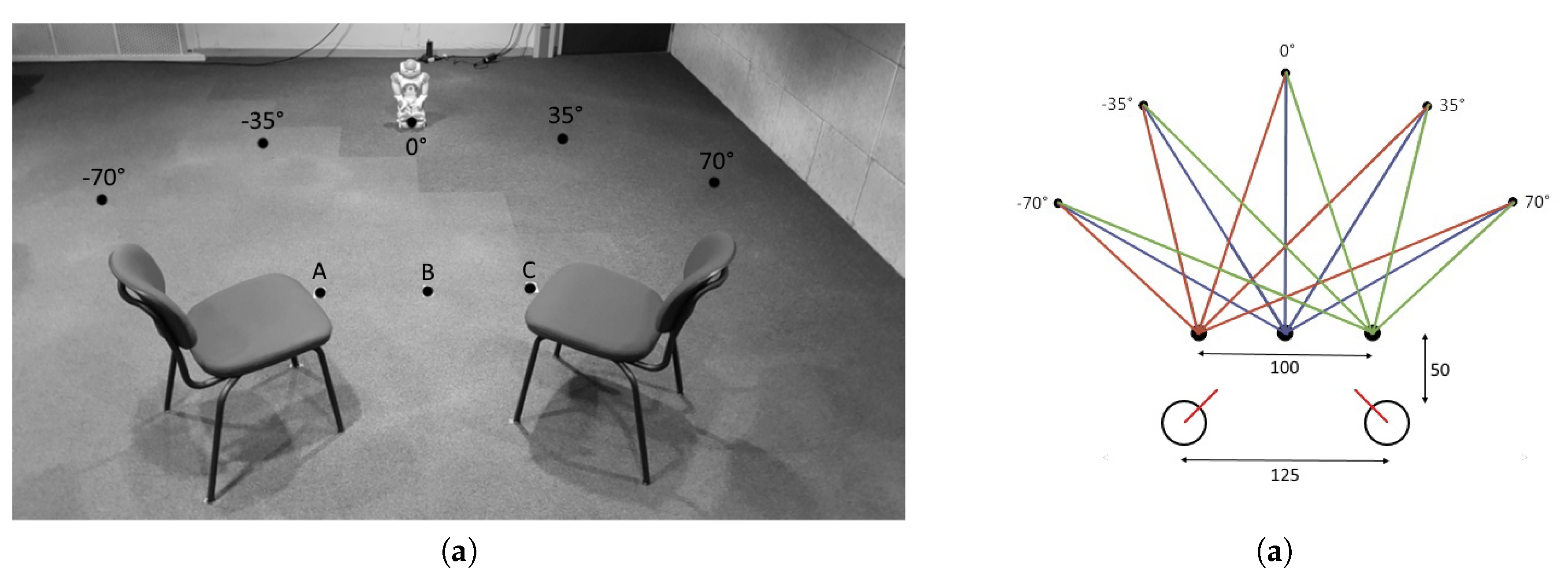
2.1.2. Materials
2.1.3. Procedure
2.2. Results
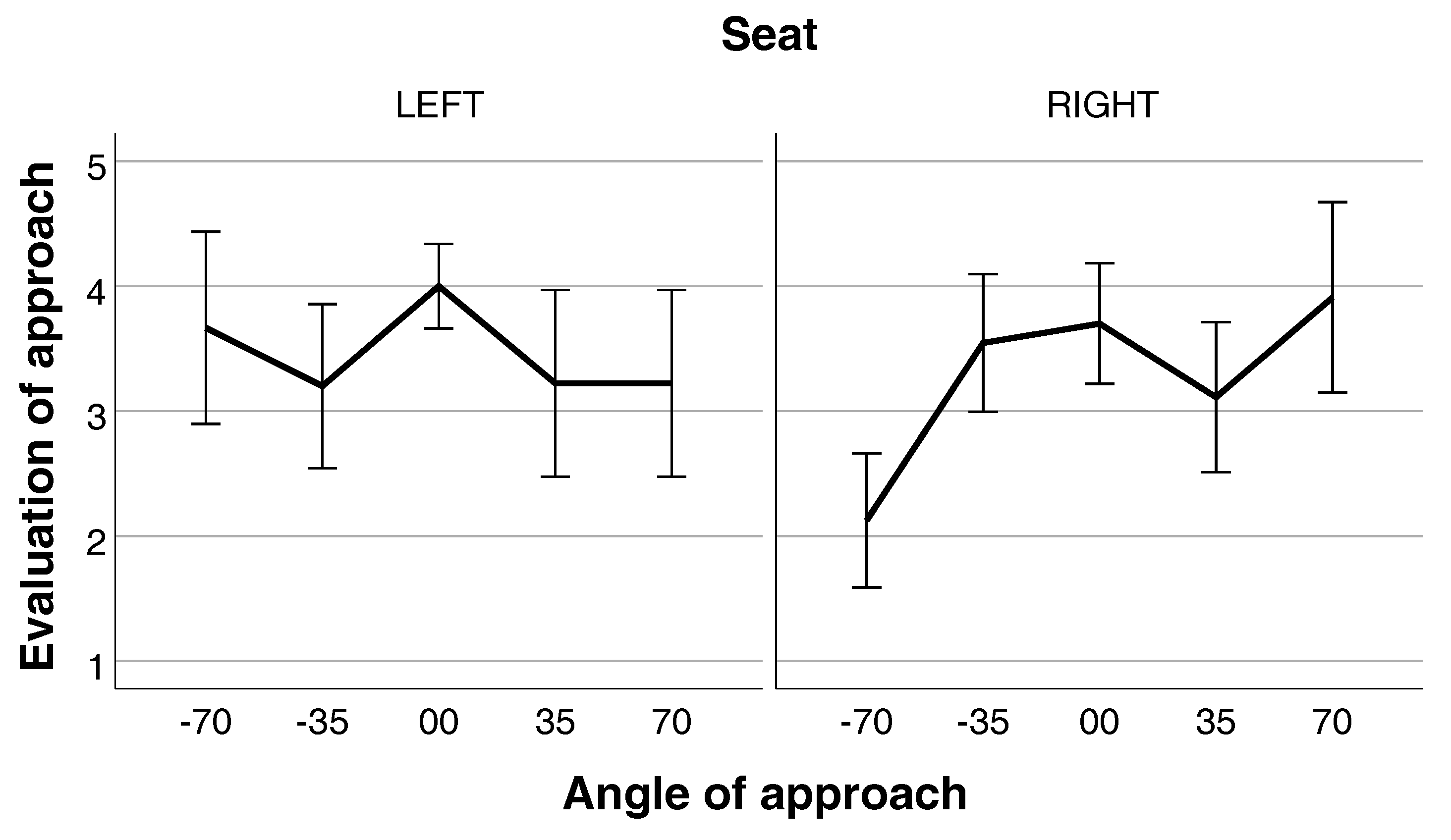
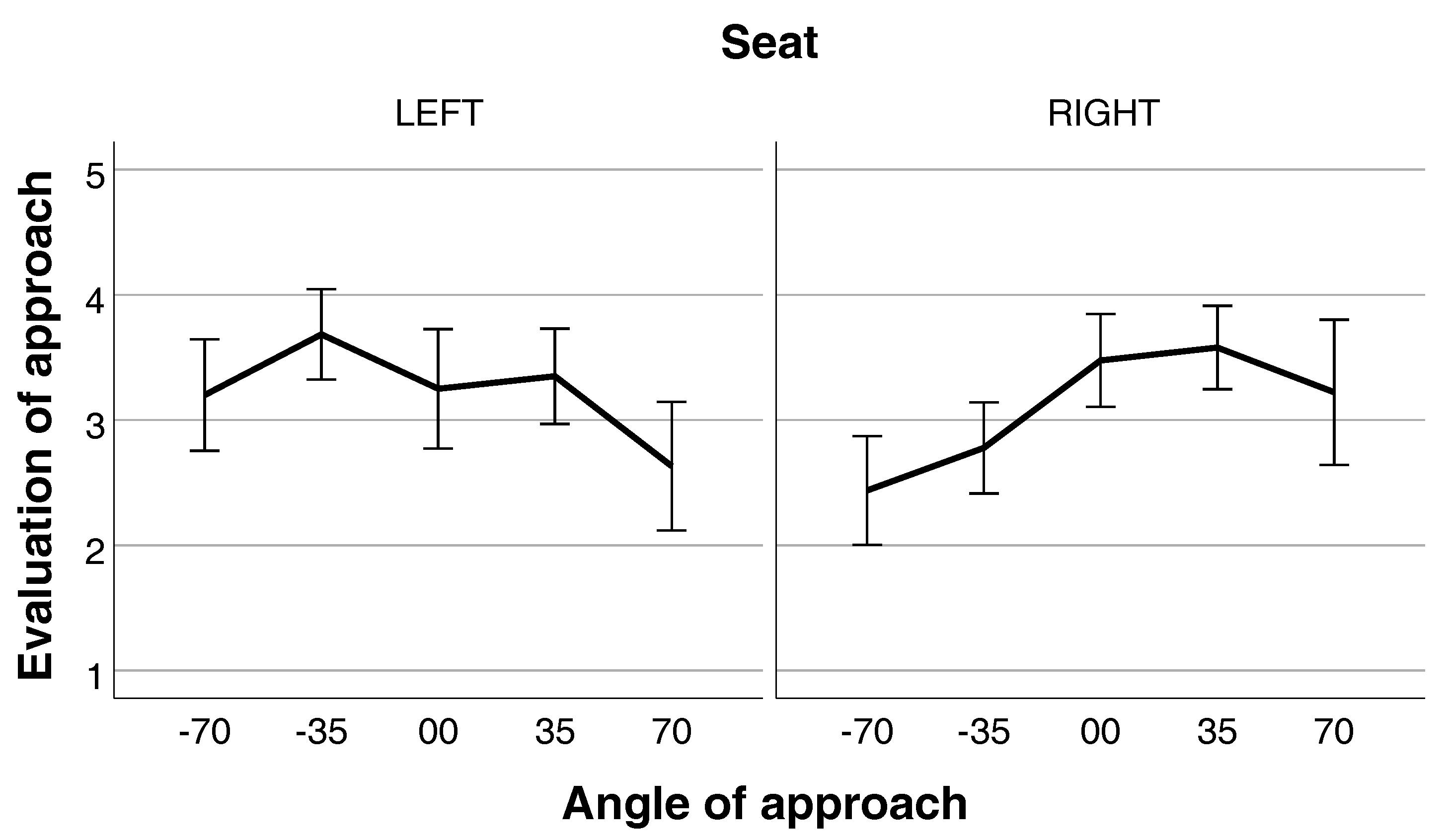
2.2.1. Evaluation of the Direction of Approach
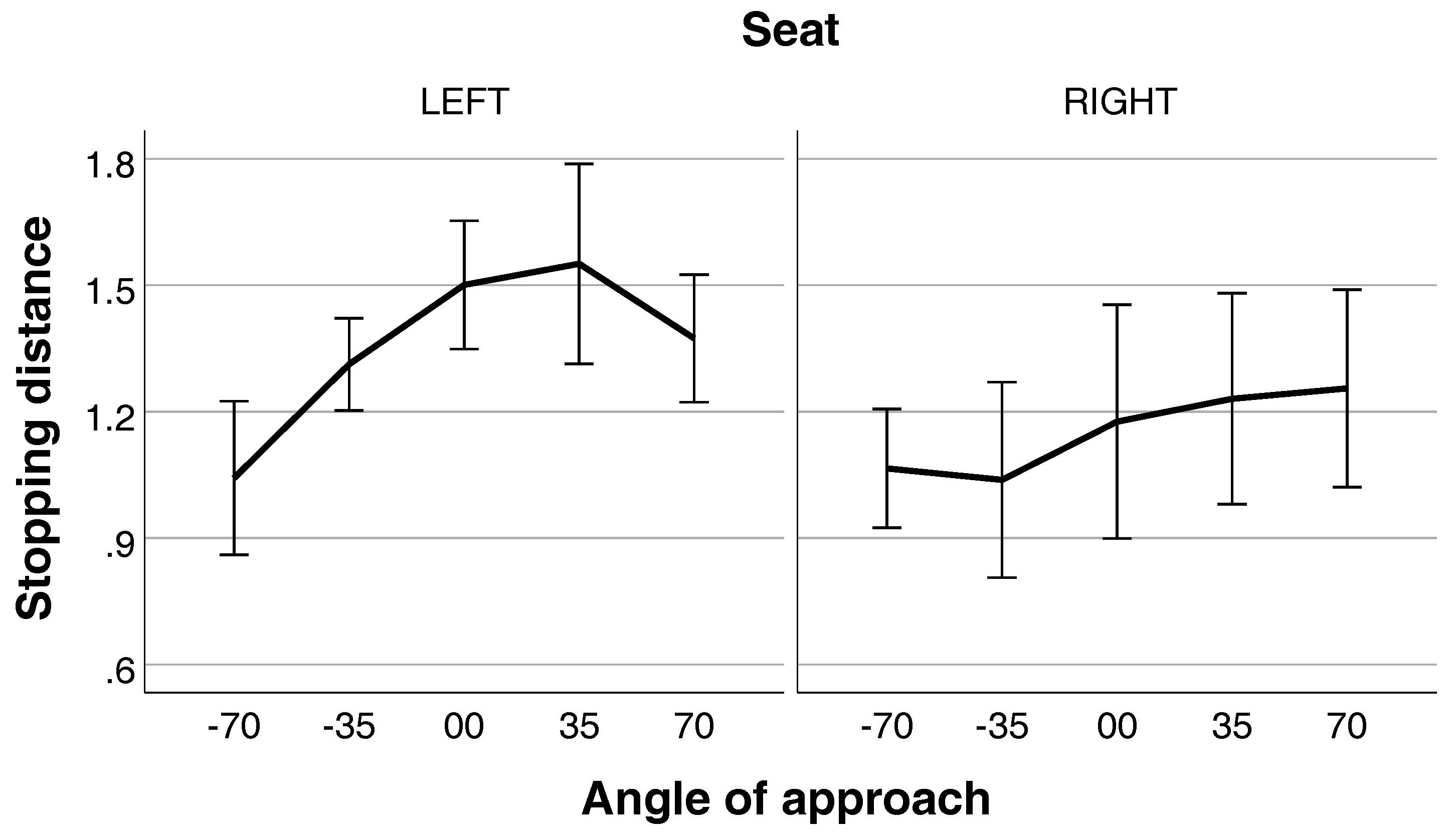
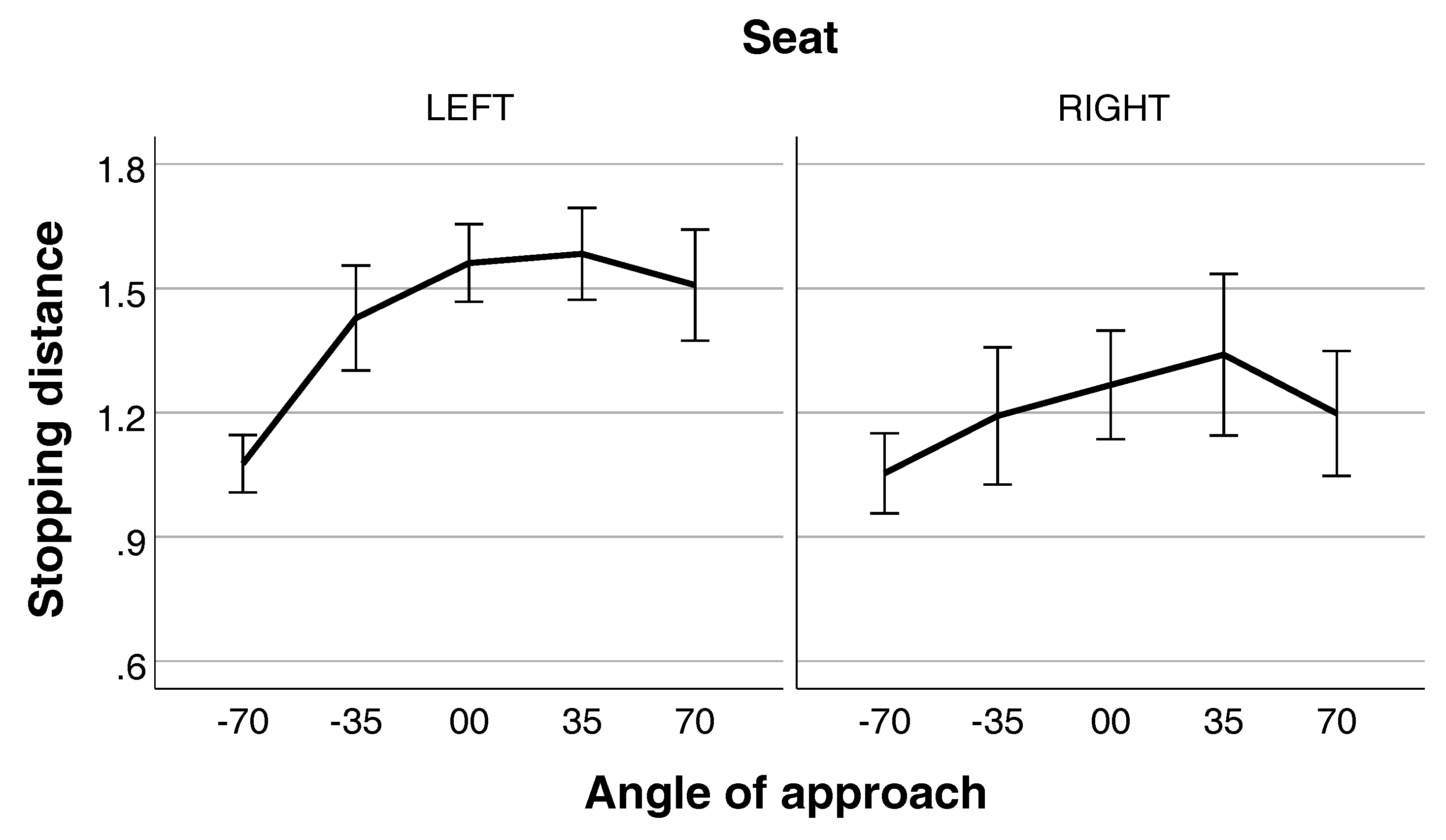
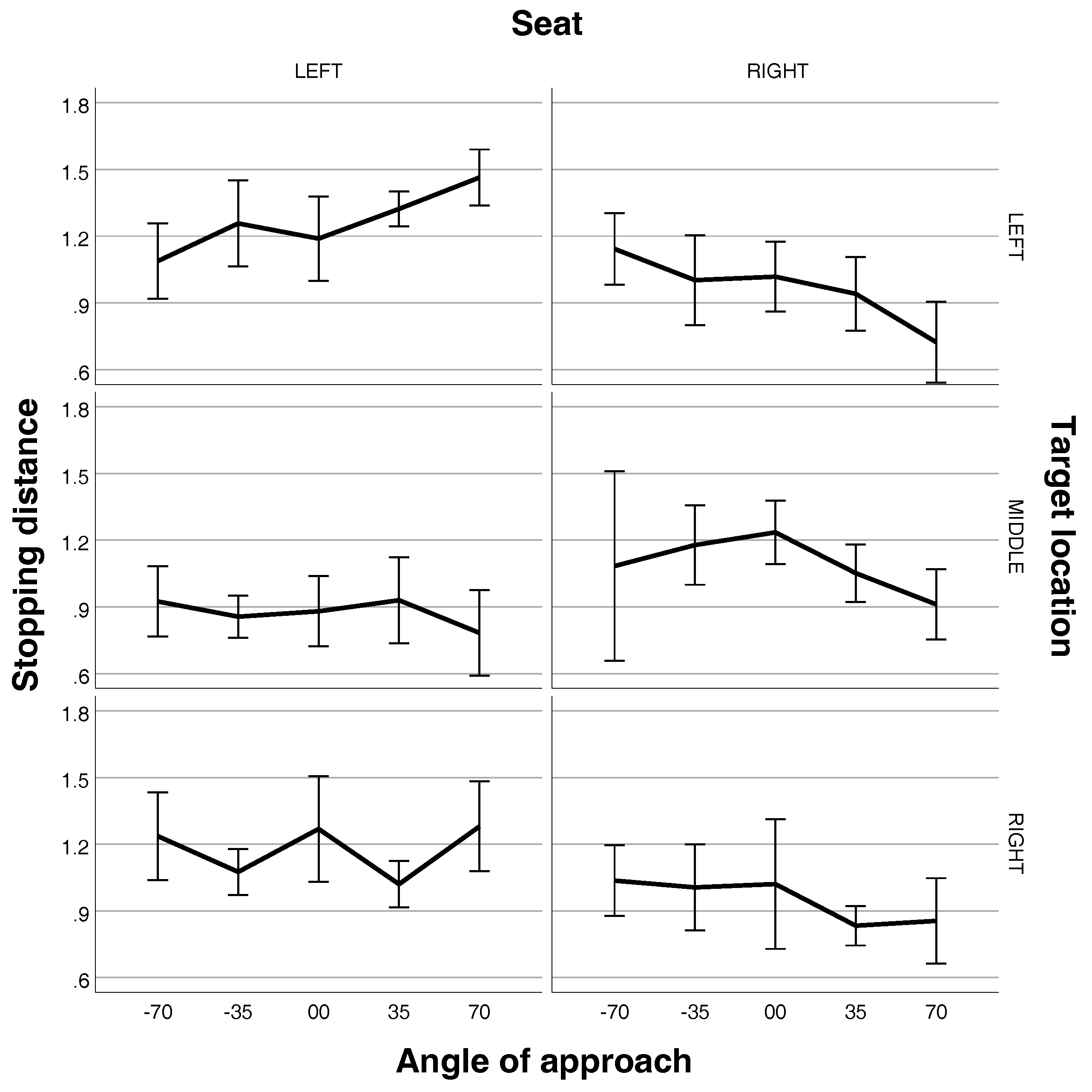
2.2.2. Stopping Distance
2.3. Discussion
3. Study 2
3.1. Method
3.1.1. Participants and Design
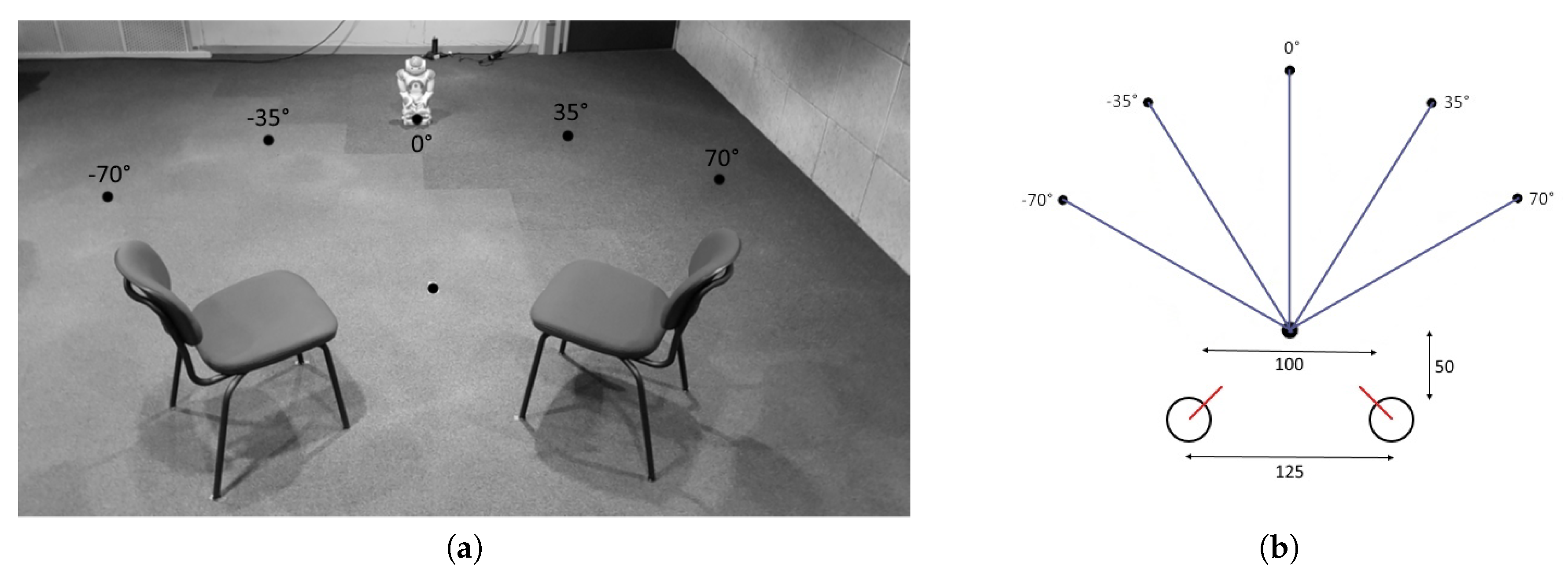
3.1.2. Materials
3.1.3. Procedure
3.2. Results
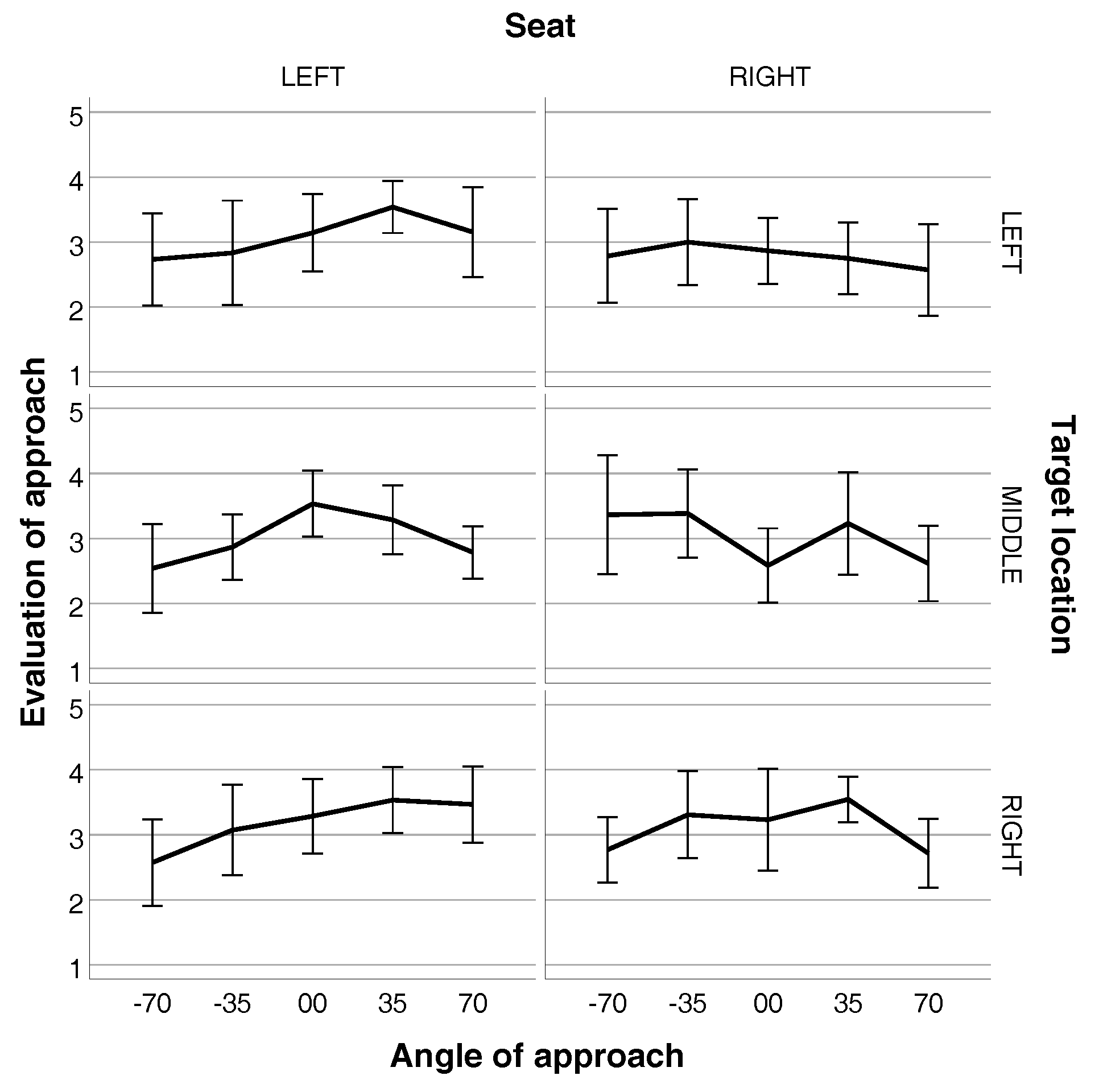
3.2.1. Evaluation of the Direction of Approach
3.2.2. Stopping Distance
3.3. Discussion
4. Study 3
4.1. Method
4.1.1. Participants and Design
4.1.2. Materials
4.1.3. Procedure
4.2. Results
4.2.1. Evaluation of the Direction of Approach
4.2.2. Stopping Distance
4.3. Discussion
5. General Discussion
6. Limitations and Future Work
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Elkmann, N.; Hortig, J.; Fritzsche, M. Cleaning automation. In Springer Handbook of Automation; Springer: Berlin/Heidelberg, Germany, 2009; pp. 1253–1264. [Google Scholar]
- Hashimoto, T.; Hiramatsu, S.; Tsuji, T.; Kobayashi, H. Realization and evaluation of realistic nod with receptionist robot SAYA. In Proceedings of the RO-MAN 2007—The 16th IEEE International Symposium on Robot and Human Interactive Communication, Jeju, Korea, 26–29 August 2007; pp. 326–331. [Google Scholar]
- Kanda, A.; Arai, M.; Suzuki, R.; Kobayashi, Y.; Kuno, Y. Recognizing groups of visitors for a robot museum guide tour. In Proceedings of the 2014 7th International Conference on Human System Interactions (HSI), Costa da Caparica, Portugal, 16–18 June 2014; pp. 123–128. [Google Scholar]
- Kirby, R.; Forlizzi, J.; Simmons, R. Affective social robots. Robot. Auton. Syst. 2010, 58, 322–332. [Google Scholar] [CrossRef] [Green Version]
- De Graaf, M.M.; Allouch, S.B. Exploring influencing variables for the acceptance of social robots. Robot. Auton. Syst. 2013, 61, 1476–1486. [Google Scholar] [CrossRef]
- Fong, T.; Nourbakhsh, I.; Dautenhahn, K. A survey of socially interactive robots. Robot. Auton. Syst. 2003, 42, 143–166. [Google Scholar] [CrossRef] [Green Version]
- Lam, C.P.; Chou, C.T.; Chiang, K.H.; Fu, L.C. Human-centered robot navigation—towards a harmoniously human–robot coexisting environment. IEEE Trans. Robot. 2010, 27, 99–112. [Google Scholar] [CrossRef]
- Kim, Y.; Mutlu, B. How social distance shapes human–robot interaction. Int. J. Hum.-Comput. Stud. 2014, 72, 783–795. [Google Scholar] [CrossRef]
- Fiore, S.M.; Wiltshire, T.J.; Lobato, E.J.; Jentsch, F.G.; Huang, W.H.; Axelrod, B. Toward understanding social cues and signals in human–robot interaction: Effects of robot gaze and proxemic behavior. Front. Psychol. 2013, 4, 859. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hall, E.T. A system for the notation of proxemic behavior. Am. Anthropol. 1963, 65, 1003–1026. [Google Scholar] [CrossRef]
- Hayduk, L.A. The shape of personal space: An experimental investigation. Can. J. Behav. Sci. Can. Des Sci. Du Comport. 1981, 13, 87. [Google Scholar] [CrossRef]
- Helbing, D.; Molnar, P. Social force model for pedestrian dynamics. Phys. Rev. E 1995, 51, 4282. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Neggers, M.M.; Cuijpers, R.H.; Ruijten, P.A. Comfortable passing distances for robots. In Proceedings of the International Conference on Social Roboticsm, Qingdao, China, 28–30 November 2018; Springer: Berlin/Heidelberg, Germany, 2018; pp. 431–440. [Google Scholar]
- Sardar, A.; Joosse, M.; Weiss, A.; Evers, V. Don’t stand so close to me: Users’ attitudinal and behavioral responses to personal space invasion by robots. In Proceedings of the Seventh Annual ACM/IEEE International Conference on Human-Robot Interaction, Boston, MA, USA, 5–8 March 2012; pp. 229–230. [Google Scholar]
- Walters, M.L.; Dautenhahn, K.; Koay, K.L.; Kaouri, C.; Boekhorst, R.; Nehaniv, C.; Werry, I.; Lee, D. Close encounters: Spatial distances between people and a robot of mechanistic appearance. In Proceedings of the 5th IEEE-RAS International Conference on Humanoid Robots, Tsukuba, Japan, 5 December 2005; 2005; pp. 450–455. [Google Scholar] [CrossRef] [Green Version]
- Torta, E.; Cuijpers, R.H.; Juola, J.F. Design of a parametric model of personal space for robotic social navigation. Int. J. Soc. Robot. 2013, 5, 357–365. [Google Scholar] [CrossRef]
- Walters, M.L.; Dautenhahn, K.; te Boekhorst, R.; Koay, K.L.; Kaouri, C.; Woods, S.; Nehaniv, C.; Lee, D.; Werry, I. The influence of subjects’ personality traits on personal spatial zones in a human-robot interaction experiment. In Proceedings of the ROMAN 2005. IEEE International Workshop on Robot and Human Interactive Communication, Nashville, TN, USA, 13–15 August 2005; IEEE: Piscataway, NJ, USA, 2005; pp. 347–352. [Google Scholar]
- Walters, M.L.; Syrdal, D.S.; Dautenhahn, K.; te Boekhorst, R.; Koay, K.L. Avoiding the uncanny valley: Robot appearance, personality and consistency of behavior in an attention-seeking home scenario for a robot companion. Auton. Robot. 2008, 24, 159–178. [Google Scholar] [CrossRef] [Green Version]
- Koay, K.L.; Sisbot, E.A.; Syrdal, D.S.; Walters, M.L.; Dautenhahn, K.; Alami, R. Exploratory Study of a Robot Approaching a Person in the Context of Handing Over an Object. In Proceedings of the AAAI Spring Symposium: Multidisciplinary Collaboration for Socially Assistive Robotics, Palo Alto, CA, USA, 26–28 March 2007; pp. 18–24. [Google Scholar]
- Mumm, J.; Mutlu, B. Human-robot Proxemics: Physical and Psychological Distancing in Human-robot Interaction. In Proceedings of the HRI ’11: 6th International Conference on Human-Robot Interaction, Lausanne, Switzerland, 8–11 March 2011; ACM: New York, NY, USA, 2011; pp. 331–338. [Google Scholar] [CrossRef]
- Mead, R.; Mataric, M.J. Robots Have Needs Too: People Adapt Their Proxemic Preferences to Improve Autonomous Robot Recognition of Human Social Signals. In New Frontiers in Human-Robot Interaction; John Benjamins Publishing Company: Amsterdam, The Netherlands, 2015; p. 100. [Google Scholar]
- Syrdal, D.S.; Dautenhahn, K.; Woods, S.; Walters, M.L.; Koay, K.L. ’Doing the right thing wrong’—Personality and tolerance to uncomfortable robot approaches. In Proceedings of the ROMAN 2006—The 15th IEEE International Symposium on Robot and Human Interactive Communication, Hatfield, UK, 6–8 September 2006; pp. 183–188. [Google Scholar] [CrossRef] [Green Version]
- Dautenhahn, K.; Walters, M.; Woods, S.; Koay, K.L.; Nehaniv, C.L.; Sisbot, A.; Alami, R.; Siméon, T. How may I serve you?: A robot companion approaching a seated person in a helping context. In Proceedings of the 1st ACM SIGCHI/SIGART Conference on Human-Robot Interaction, Salt Lake City UT, USA, 2–3 March 2006; ACM: New York, NY, USA, 2006; pp. 172–179. [Google Scholar]
- Ball, A.; Rye, D.; Silvera-Tawil, D.; Velonaki, M. Group Vs. Individual Comfort When a Robot Approaches. In Proceedings of the Social Robotics: 7th International Conference, ICSR 2015, Paris, France, 26–30 October 2015; Tapus, A., André, E., Martin, J.C., Ferland, F., Ammi, M., Eds.; Springer: Cham, Switzerland, 2015; pp. 41–50. [Google Scholar]
- Karreman, D.; Utama, L.; Joosse, M.; Lohse, M.; van Dijk, B.; Evers, V. Robot Etiquette: How to Approach a Pair of People? In Proceedings of the HRI’14: ACM/IEEE International Conference on Human-Robot Interaction, Bielefeld, Germany, 3–6 March 2014; ACM: New York, NY, USA, 2014; pp. 196–197. [Google Scholar]
- Ciolek, M.; Kendon, A. Environment and the spatial arrangement of conversational encounters. Sociol Inq 1980, 50, 237–271. [Google Scholar] [CrossRef]
- Kendon, A. Conducting Interaction: Patterns of Behavior in Cocused Encounters; CUP Archive: Cambridge, UK, 1990; Volume 7. [Google Scholar]
- Althaus, P.; Ishiguro, H.; Kanda, T.; Miyashita, T.; Christensen, H.I. Navigation for human-robot interaction tasks. In Proceedings of the IEEE International Conference on Robotics and Automation ICRA ’04, New Orleans, LA, USA, 26 April–1 May 2004; Volume 2, pp. 1894–1900. [Google Scholar]
- Gómez, J.V.; Mavridis, N.; Garrido, S. Social Path Planning: Generic Human-Robot Interaction Framework for Robotic Navigation Tasks. In Proceedings of the 2nd Intl. Workshop on Cognitive Robotics Systems: Replicating Human Actions and Activities, Tokyo, Japan, 3 November 2013. [Google Scholar]
- Rios-Martinez, J. Socially-Aware Robot Navigation: Combining Risk Assessment and Social Conventions. Ph.D. Thesis, University of Grenoble, Saint-Martin-d’Heres, France, 2013. [Google Scholar]
- Kosiński, T.; Obaid, M.; Woźniak, P.W.; Fjeld, M.; Kucharski, J. A fuzzy data-based model for Human-Robot Proxemics. In Proceedings of the 2016 25th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), New York, NY, USA, 26–31 August 2016; pp. 335–340. [Google Scholar]
- Sisbot, E.A.; Alami, R.; Simeon, T.; Dautenhahn, K.; Walters, M.; Woods, S. Navigation in the presence of humans. In Proceedings of the 5th IEEE-RAS International Conference on Humanoid Robots, Tsukuba, Japan, 5 December 2005; pp. 181–188. [Google Scholar] [CrossRef] [Green Version]
- Sisbot, E.A.; Marin-Urias, L.F.; Alami, R.; Simeon, T. A Human Aware Mobile Robot Motion Planner. IEEE Trans. Robot. 2007, 23, 874–883. [Google Scholar] [CrossRef] [Green Version]
- Satake, S.; Kanda, T.; Glas, D.F.; Imai, M.; Ishiguro, H.; Hagita, N. How to approach humans?-Strategies for social robots to initiate interaction. In Proceedings of the Conference on Human-Robot Interaction (HRI), 2009 4th ACM/IEEE International, La Jolla, CA, USA, 9–13 March 2009; pp. 109–116. [Google Scholar] [CrossRef]
- Papadakis, P.; Spalanzani, A.; Laugier, C. Social mapping of human-populated environments by implicit function learning. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 1701–1706. [Google Scholar]
- Papadakis, P.; Rives, P.; Spalanzani, A. Adaptive spacing in human-robot interactions. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 2627–2632. [Google Scholar]
- Charalampous, K.; Kostavelis, I.; Gasteratos, A. Robot navigation in large-scale social maps: An action recognition approach. Expert Syst. Appl. 2016, 66, 261–273. [Google Scholar] [CrossRef]
- Walters, M.L.; Dautenhahn, K.; Te Boekhorst, R.; Koay, K.L.; Syrdal, D.S.; Nehaniv, C.L. An empirical framework for human-robot proxemics. In Procs of New Frontiers in Human-Robot Interaction; symposium at the AISB09 convention; 2009; pp. 144–149. Available online: https://uhra.herts.ac.uk/handle/2299/9670 (accessed on 6 March 2020).
- Mead, R.; Mataric, M.J. Probabilistic models of proxemics for spatially situated communication in hri. In Proceedings of the 2014 9th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Bielefeld, Germany, 3–6 March 2014. [Google Scholar]









© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ruijten, P.A.M.; Cuijpers, R.H. Do Not Let the Robot Get too Close: Investigating the Shape and Size of Shared Interaction Space for Two People in a Conversation. Information 2020, 11, 147. https://doi.org/10.3390/info11030147
Ruijten PAM, Cuijpers RH. Do Not Let the Robot Get too Close: Investigating the Shape and Size of Shared Interaction Space for Two People in a Conversation. Information. 2020; 11(3):147. https://doi.org/10.3390/info11030147
Chicago/Turabian StyleRuijten, Peter A. M., and Raymond H. Cuijpers. 2020. "Do Not Let the Robot Get too Close: Investigating the Shape and Size of Shared Interaction Space for Two People in a Conversation" Information 11, no. 3: 147. https://doi.org/10.3390/info11030147
APA StyleRuijten, P. A. M., & Cuijpers, R. H. (2020). Do Not Let the Robot Get too Close: Investigating the Shape and Size of Shared Interaction Space for Two People in a Conversation. Information, 11(3), 147. https://doi.org/10.3390/info11030147