Iterative Truncated Unscented Particle Filter


Abstract
:1. Introduction
2. Preliminary Knowledge
2.1. State Estimation with Inequality Constraints
2.2. Particle Filter
3. Iterative Truncated Particle Filter
3.1. Iterative Truncated UKF
3.1.1. Iterative Unscented Kalman Filter
3.1.2. Truncation of the PDF
3.2. Iterative Truncated UPF
| Algorithm 1: Iterative Truncated Unscented Particle Filter |
| Step 1: Calculate mean and covariance: and according to Equations (32) and (33); Step 2: Calculate the first two moment estimations using the IUKF as: Step 4: Draw particles from the truncated proposal distribution: until for N particles the condition holds; Step 5: Compute the particle weights: Step 7: Using the particle set to calculate the state estimates, then continue with step 1; |
4. Simulation Results
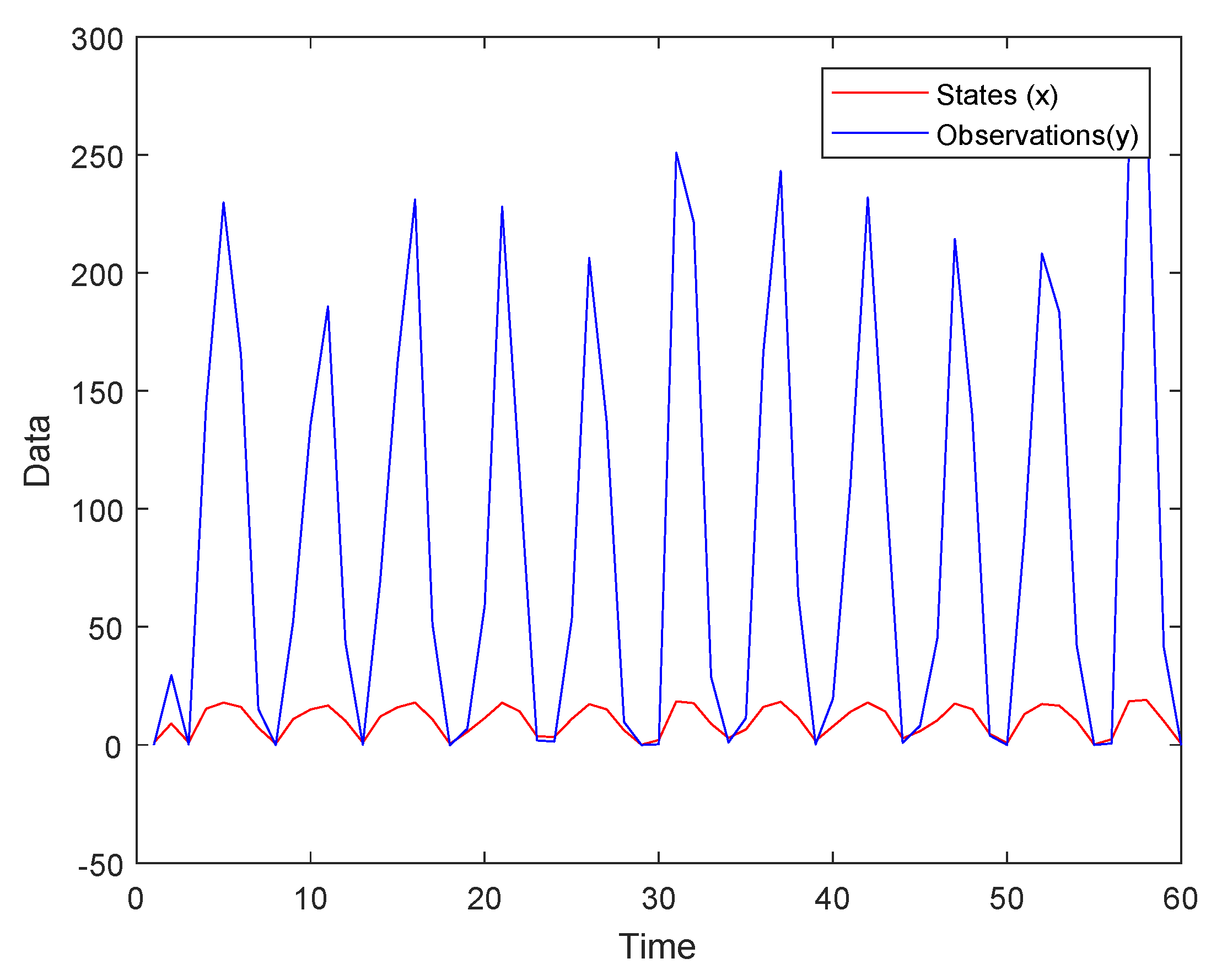
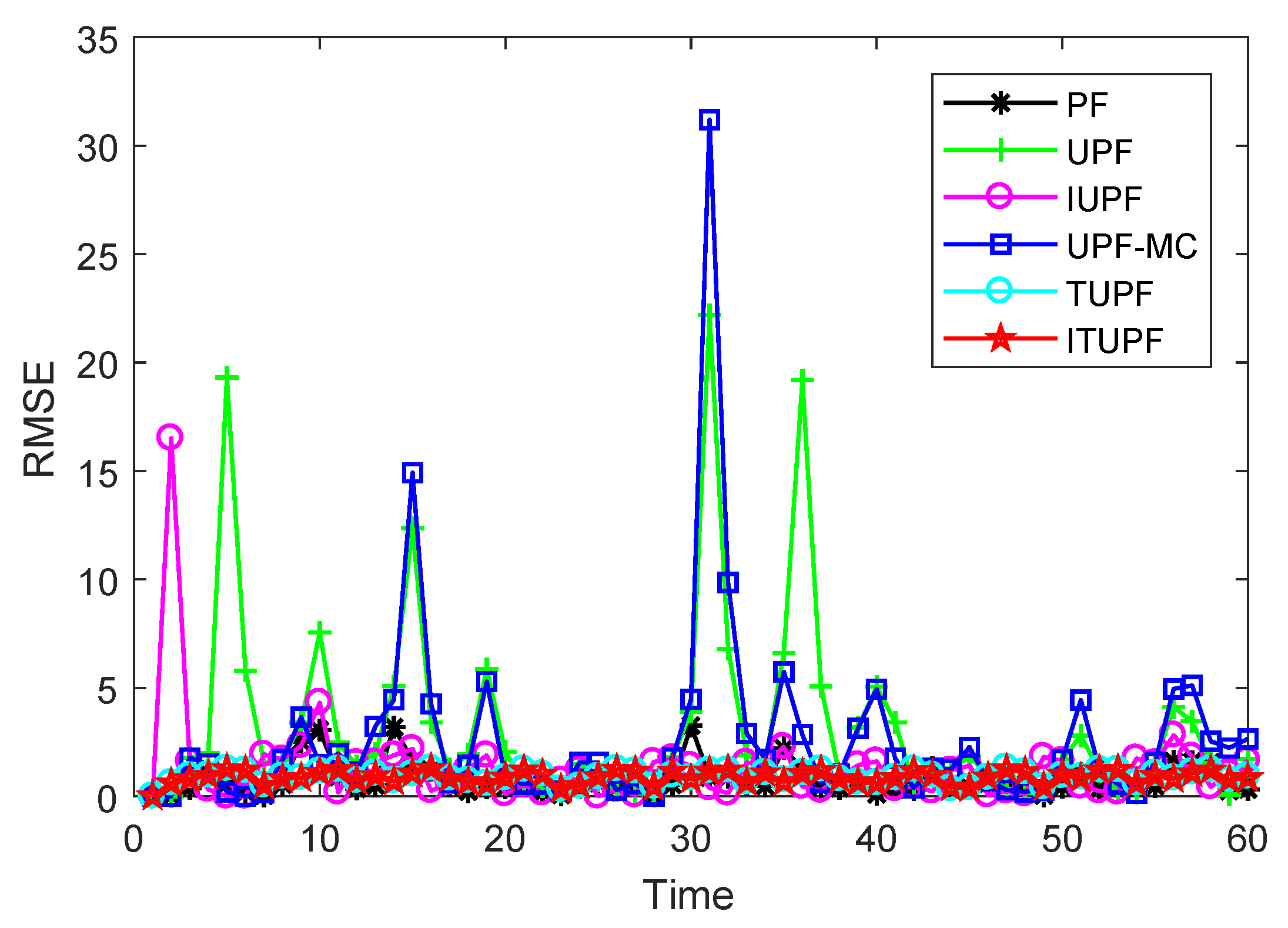
4.1. Univariate Nonstationary Growth Model I
4.2. Univariate Nonstationary Growth Model II
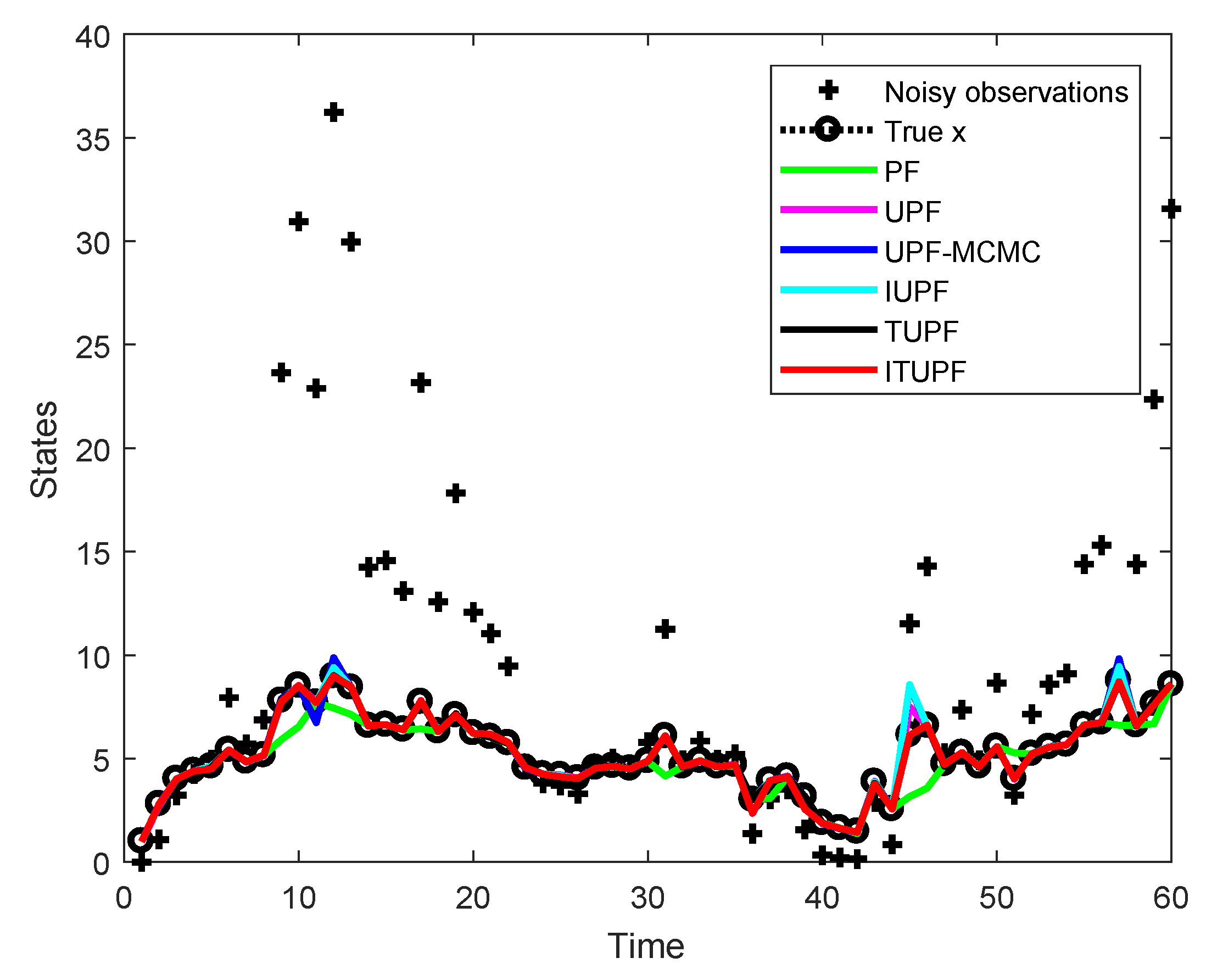
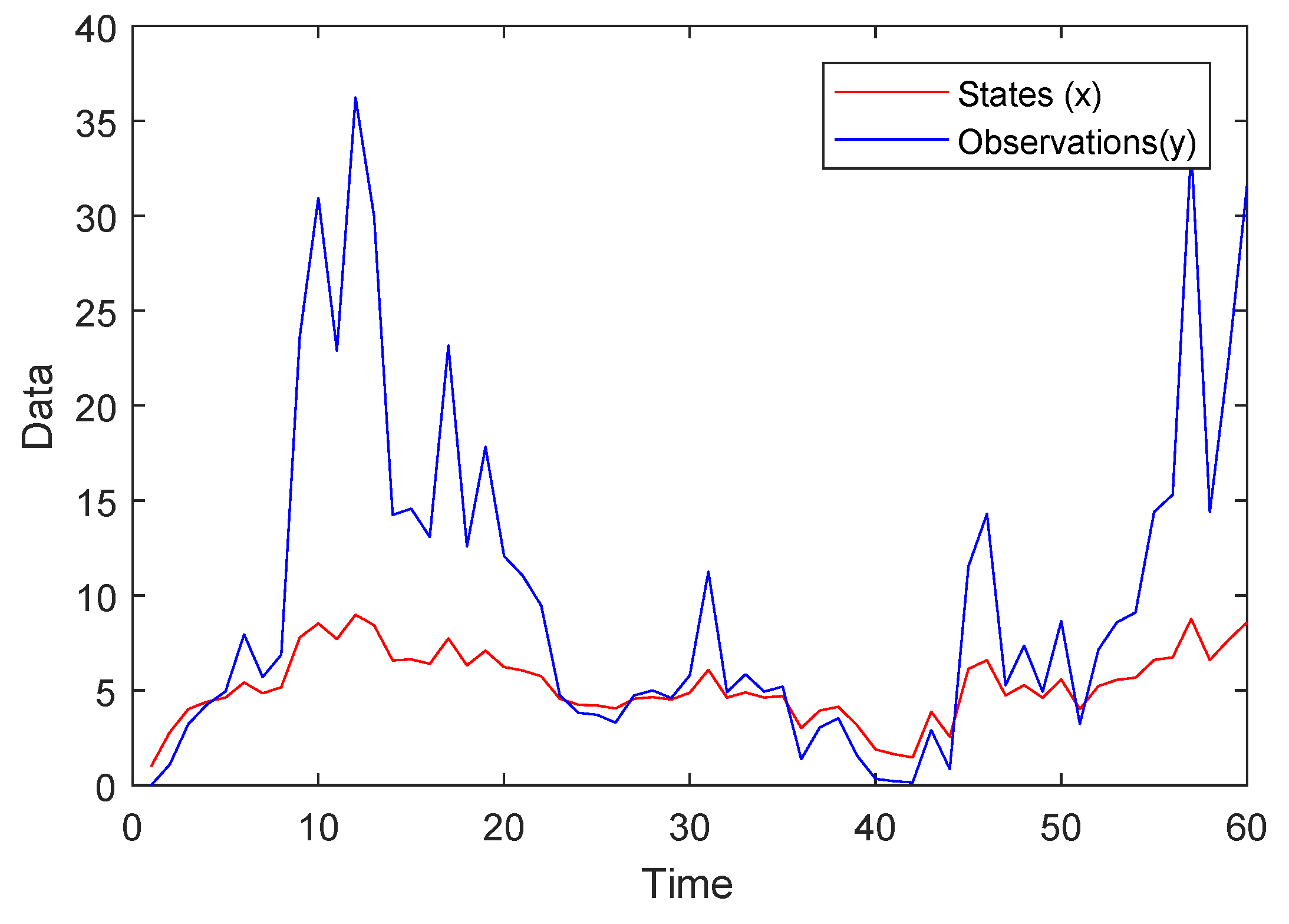
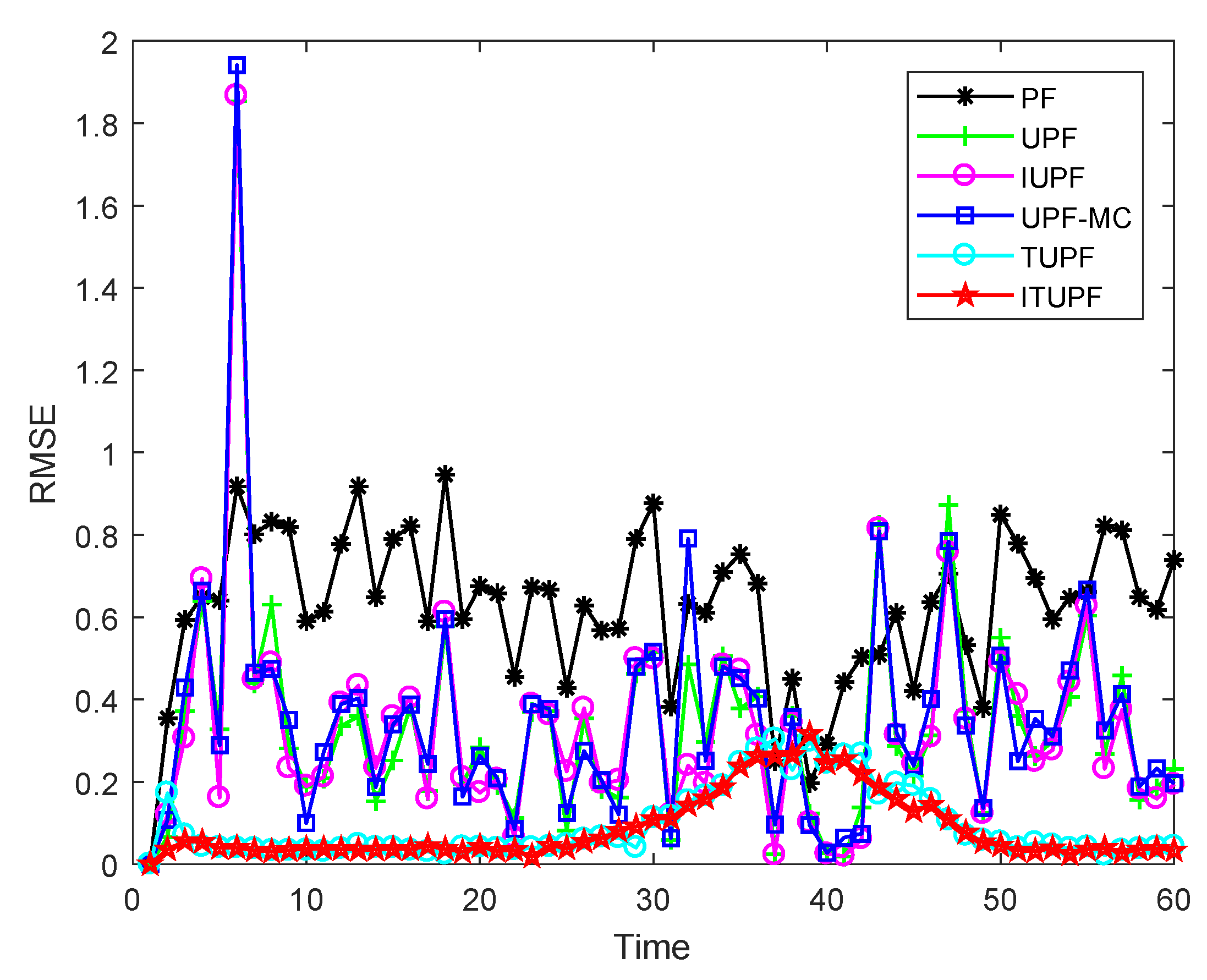
4.3. Tracking an Vehicle Moving along a Circular Road
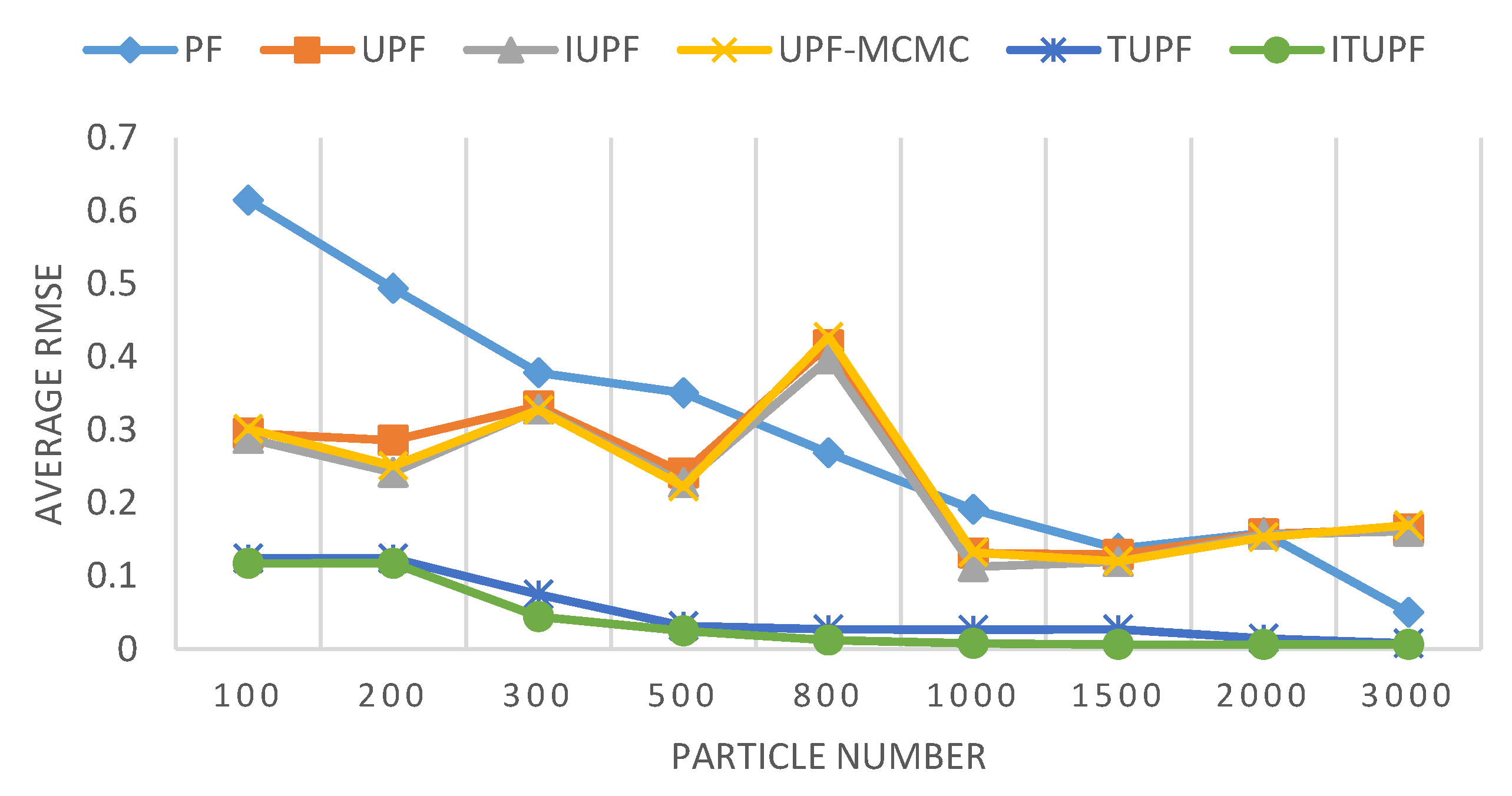
4.4. Particle Number Influence
4.5. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| Probability density function | |
| PF | Particle Filter |
| EKF | Extended Kalman Filter |
| UKF | Unscented Kalman Filter |
| UPF | Unscented Particle Filter |
| IUKF | Iterative Unscented Kalman Filter |
| IEKF | Iterative Extended Kalman Filter |
| TUKF | Truncated Unscented Kalman Filter |
| MTUKF | Mixture Truncated UKF |
| ATPF | Auxiliary Truncated PF |
| ITUPF | Iterative TUPF |
| MSE | Mean Square Error |
| MCMC | Markov Chain Monte Carlo |
| RMSE | Root Mean Square Error |
References
- Sarkka, S. Bayesian Filtering and Smoothing; Cambridge University Press: Cambridge, UK, 2013. [Google Scholar]
- Li, W.; Liu, L.; Feng, G. Cooperative control of multiple nonlinear benchmark systems perturbed by second-order moment processes. IEEE Trans. Cybern. 2020, 50, 902–910. [Google Scholar] [CrossRef] [PubMed]
- Li, W.; Liu, L.; Feng, G. Distributed output-feedback tracking of multiple nonlinear systems with unmeasurable states. IEEE Trans. Syst. Man Cybern. 2019. [Google Scholar] [CrossRef]
- Ababsa, F.; Mallem, M. Robust camera pose tracking for augmented reality using particle filtering framework. Mach. Vis. Appl. 2011, 22, 181–195. [Google Scholar] [CrossRef]
- Liu, C.; Li, B.; Chen, W. Particle filtering with soft state constraints for target tracking. IEEE Trans. Aerospace Electr. Syst. 2019, 66, 3492–3504. [Google Scholar] [CrossRef] [Green Version]
- Wang, F.; Sun, F.; Zhang, J.; Lin, B.; Li, X. Unscented particle filter for online total image Jacobian matrix estimation in robot visual servoing. IEEE Access 2019, 7, 92020–92029. [Google Scholar] [CrossRef]
- Lopes, H.F.; Tsay, R.S. Particle filters and Bayesian inference in financial econometrics. J. Forecast. 2011, 30, 168–209. [Google Scholar] [CrossRef]
- Xiao, Y.; Pan, D. Research on Robust Visual Tracker Based on Multi-Cue Correlation Particle Filters. IEEE Access 2020, 8, 1–10. [Google Scholar] [CrossRef]
- Cai, R.; Zhang, R.; Wu, Q.; Sun, H. Adaptation of unscented particle filter for visual tracking in electro-optic theodolite. In Proceedings of the 5th IET International Conference on Wireless, Mobile and Multimedia Networks (ICWMMN 2013), Beijing, China, 22–25 November 2013; pp. 181–185. [Google Scholar]
- Van der Merwe, R.; Doucet, A.; Freitas, N.; Wan, E.A. The unscented particle filter. In Proceedings of the Neural Information Processing Systems (NIPS 2000), Denver, CO, USA, 27–30 November 2000; pp. 584–590. [Google Scholar]
- Li, L.; Ji, H.; Luo, J. The iterated extended Kalman particle filter. In Proceedings of the International Symposium on Communications and Information Technologies (ISCIT 2005), Beijing, China, 12–14 October 2005; pp. 1213–1216. [Google Scholar]
- Wang, F.; Li, X.; Lu, M. Improving Particle Filter with better Proposal Distribution for Nonlinear Filtering Problems. In Proceedings of the International Conference on Algorithms, Systems, and Applications of Wireless Networks (WASA 2013), Zhangjia, China, 7–10 August 2013; pp. 1–12. [Google Scholar]
- Wang, F.; Zhang, J.; Lin, B.; Li, X. Two stage particle filter for nonlinear bayesian estimation. IEEE Access 2018, 6, 13803–13809. [Google Scholar] [CrossRef]
- Amor, N.; Rasool, G.; Bouaynaya, N. Constrained State Estimation—A Review. arXiv 2018, arXiv:1807.03463. [Google Scholar]
- Fernandez, A.; Morelande, M.; Grajal, J. Truncated unscented kalman filter. IEEE Trans. Signal Process. 2012, 60, 3372–3386. [Google Scholar] [CrossRef]
- Fernandez, A.; Morelande, M.; Grajal, J. Mixture truncated unscented kalman filtering. In Proceedings of the International Conference on Information Fusion (ICIF 2012), Singapore, 9–12 July 2012; pp. 479–486. [Google Scholar]
- Amor, N.; Bouaynaya, N.; Shterenberg, R.; Chebbi, S. On the convergence of constrained particle filters. IEEE Signal Process. Lett. 2017, 24, 858–862. [Google Scholar] [CrossRef]
- Straka, O.; Dunik, J.; Simandl, M. Truncated unscented particle filter. In Proceedings of the American Control Conference, San Francisco, CA, USA, 29 June–1 July 2011; pp. 1825–1830. [Google Scholar]
- Li, L.; Xie, W.; Liu, Z. Auxiliary truncated particle filtering with least-square method for bearings-only maneuvering target tracking. IEEE Trans. Aerospace Electr. Syst. 2016, 52, 2562–2567. [Google Scholar] [CrossRef]
- Zhang, H.; Li, L.; Xie, W. Constrained multiple model particle filtering for bearings-only maneuvering target tracking. IEEE Access 2018, 6, 51721–51734. [Google Scholar] [CrossRef]
- Yu, M.; Chen, W.; Chambers, J. Truncated unscented particle filter for dealing with non-linear and inequality constraints. In Proceedings of the Sensor Signal Processing for Defence (SSPD 2014), Edinburgh, UK, 8–9 September 2014; pp. 1–5. [Google Scholar]
- Zhao, Z.; Huang, B.; Liu, F. Constrained particle filtering methods for state estimation of nonlinear process. AICHE J. 2014, 60, 2072–2082. [Google Scholar] [CrossRef]
- Heng, J.; Bishop, A.; Deligiannidis, G.; Doucet, A. Controlled sequential Monte Carlo. arXiv 2017, arXiv:1708.08396. [Google Scholar]
- Huang, Q. Inequality constrained state-space models. J. Bus. Econ. Stat. 2019, 37, 350–362. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Filters | RMSE Mean | RMSE Variance | Average Computational Time |
|---|---|---|---|
| PF | 1.2907 | 0.5968 | 0.3768 |
| UPF | 2.389 | 13.6974 | 0.9644 |
| IUPF | 2.3624 | 0.3168 | 1.6903 |
| UPF-MCMC | 2.4064 | 12.8904 | 2.2442 |
| TUPF | 0.9382 | 0.01955 | 0.9364 |
| ITUPF | 0.9272 | 0.01938 | 1.5063 |
| Filters | RMSE Mean | RMSE Variance | Average Computational Time |
|---|---|---|---|
| PF | 0.6151 | 0.0454 | 0.1969 |
| UPF | 0.2957 | 0.0999 | 0.5026 |
| IUPF | 0.2884 | 0.0976 | 0.7978 |
| UPF-MCMC | 0.3014 | 0.1107 | 1.1462 |
| TUPF | 0.1240 | 0.00173 | 0.4964 |
| ITUPF | 0.1178 | 0.00102 | 0.7866 |
| Filters | MSE | Average Computational Time |
|---|---|---|
| TUPF | 3.6721 | 4.84 |
| ITUPF | 3.2655 | 7.47 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Wang, F.; He, J.; Sun, F. Iterative Truncated Unscented Particle Filter. Information 2020, 11, 214. https://doi.org/10.3390/info11040214
Wang Y, Wang F, He J, Sun F. Iterative Truncated Unscented Particle Filter. Information. 2020; 11(4):214. https://doi.org/10.3390/info11040214
Chicago/Turabian StyleWang, Yanbo, Fasheng Wang, Jianjun He, and Fuming Sun. 2020. "Iterative Truncated Unscented Particle Filter" Information 11, no. 4: 214. https://doi.org/10.3390/info11040214
APA StyleWang, Y., Wang, F., He, J., & Sun, F. (2020). Iterative Truncated Unscented Particle Filter. Information, 11(4), 214. https://doi.org/10.3390/info11040214