1. Introduction
Automatic license plate recognition (ALPR) has had many real-world practical applications such as automatic toll collection, traffic law enforcement, parking lot access control, and road traffic monitoring. With increasing needs for intelligent transportation systems, ALPR has been studied actively despite its long history. In general, the pipeline of license plate recognition (LPR) systems has the four steps of image preprocessing, license plate detection, character segmentation, and optical character recognition (OCR). Various image conditions, such as perspective, color, font, occlusion, illumination, background, and country standards, make ALPR challenging.
ALPR is one of the active areas that are eager to benefit from the brilliant performance of deep learning methods. Such attempts began with using the Recurrent Neural Network (RNN) and regression boxes to localize texts under complicated environments [
1]. Convolutional Neural Network (CNN) was the most successful solution for detecting plates typically coupled with sliding windows [
2,
3,
4,
5]. Variations of CNN such as Fast-RCNN and YOLO were proposed as well [
6,
7,
8]. Recent approaches [
9,
10,
11,
12] have sought end-to-end architectures in which not only recognition but also image transformation occurs at the same time. Deep-learning-based approaches have been more efficient than traditional image processing methods, because feature decisions can be automated through the training process.
The outstanding performance of deep-learning-based ALPR is partly attributed to image-warping methods that rectify deformed plates in images. Even though image augmentation methods can help to improve the recognition accuracy and generalization of ALPR by artificially generating various types of deformed plates, warping methods have advantages over augmentation in terms of cost and computation. The warping task essentially involves matching and regression for parameters representing deformation, which can then be used for the rectification of plates, which leads to improved plate recognition.
In this paper, we propose deep learning models that are capable of predicting four-corner coordinates of deformed plate images, as shown in
Figure 1. The four corners are then used to calculate transformation matrix, called homography, that rectifies plates. Whereas affine transformation is not always successful in rectifying plates because of its limitation that keeps parallel lines as they are, homography is general enough to handle various types of projective transformation. The homography is as follows in Equation (1).
where
in one image is mapped to
in a target image. Since the homography matrix has the degree of freedom of 8 with
, we need a four pair of matching 2D coordinates to determine the matrix parameters of
.
In this paper, we tackle the four-corner prediction problem by building and experimenting with a set of deep neural network models. We contribute by proposing an open neural network that can plug in well-known models such as Mobilenet and autoencoders in order to harness their power of feature extraction. Another contribution is a novel loss function that considers prediction errors not only in terms of coordinates but also in terms of image level. This paper is organized as follows. We review ALPR-related works in
Section 2. We present our models in detail in
Section 3 and discuss the experiment results in
Section 4. We conclude the paper in
Section 5 by discussing future work.
3. Deep Models for Corner Prediction
We propose deep neural network models, as shown in
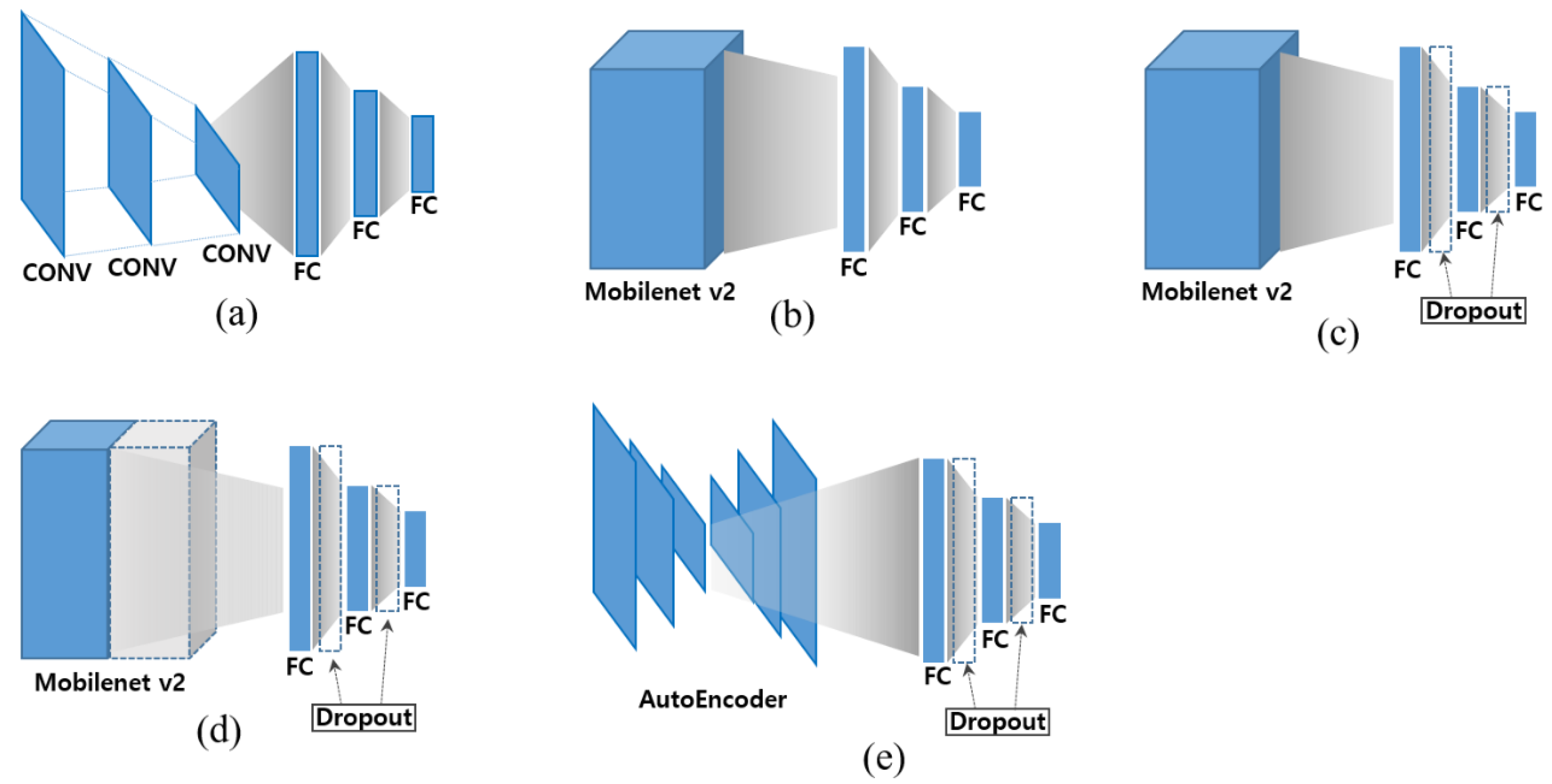
Figure 2, which predict four-corner coordinates of license plates in an end-to-end manner. With the coordinates, we build a transformation matrix rectifying plates, resulting in improved character recognition accuracy in ALPR. The models share a similar two-phase structure; the first phase extracts geometric characteristics, which are then fed to fully connected layers of the second phase, which performs the prediction of the coordinates.
Figure 2a is a baseline model that consists of a set of convolution layers followed by a set of fully connected layers. The input is an image with dimension of W × H × C, and the output is a length-8 vector corresponding to four pairs of normalized
. A hybrid model replacing the convolution layers with Mobilenet [
21] is presented in
Figure 2b. Its motivation is to avoid reinventing the wheel by having well-known object detection model extract geometric features. The next model of
Figure 2c is the same as the hybrid model, except that the dropout layers are inserted between the fully connected layers for the model generalization. In the sense of feature extraction, it seems more appropriate to use the intermediate results of Mobilenet rather than the classification results. This observation motivates the configuration of
Figure 2d that connects the output of the hidden layers of Mobilenet to the fully connected layers. The idea of
Figure 2e stems from the fact that the encoders of autoencoder networks are good at capturing characteristics of images. It encourages one to feed the latent results from an autoencoder to the fully connected layers. We train the autoencoder in advance to be capable of reconstructing plates.
The models are open in the sense that, besides Mobilenet, other established networks can be plugged in the place of the feature extraction. A relatively small size but comparable performance is the main reason to use Mobilenet in our configuration, because one of the ALPR requirements is compactness for on-site installation. However, we do not limit the possibility to plug in other models such as Resnet [
19] and MnasNet [
22].
The second phase layers consist of fully connected layers for regression. They are different only by the dimensions of their inputs, which are dependent on the outputs from their corresponding previous layers. The regression output should be de-normalized before use by multiplying with image dimension.
As a loss function for an input image
, we use a weighted sum of two loss factors as Equation (2):
where
is related to how far the predicted corner coordinates are from ground truth values and
is about how different the rectified images based on the predictions are from ground truth image in pixel-wise.
determines the proportion of each factor with
, and
is a constant that is needed to compensate the volume difference between two factors.
is the sum of squared differences between four corresponding coordinate pairs of ground truth and predicted coordinates as Equation (3).
where
and
are the normalized coordinates of ground truth and prediction, respectively, and
represents the positions.
The other loss factor of
is L1 loss for the transformed input image as Equation (4)
where
is the perspective transformation result of
based on the prediction and
is the ground truth of rectification that can be easily obtained from ground truth four-corner positions. Having two losses helps to preserve the appearance of plates such as intensity and illumination, and leads to denoising results capable of only geometric transformation.
Having four-corner predictions, the rectification begins by determining the target coordinates to which the predicted ones are mapped, which are the four corners of the plate rectangle without obliqueness. The target coordinates can be easily decided assuming the sizes and aspect ratio of plates are known in advance. Once one-to-one correspondence relationship between the target and the predictions is established, a homography matrix is determined by which actual rectification proceeds.
4. Experiments
We use a proprietary data set of 1137 plate images, all of which are tilted. All the images are preprocessed to be gray and have a size of 416 × 416. Since plates have wide width that is not able to fit the whole images, the bottom part remained empty. For training purposes, we manually labelled four corner coordinates of plates in separate files. The four corners are
of
;
is the left top corner, and the rest are numbered clock-wise as in
Figure 1. The coordinate
s is normalized as in YOLO [
23] by dividing
and
by image dimension, having
.
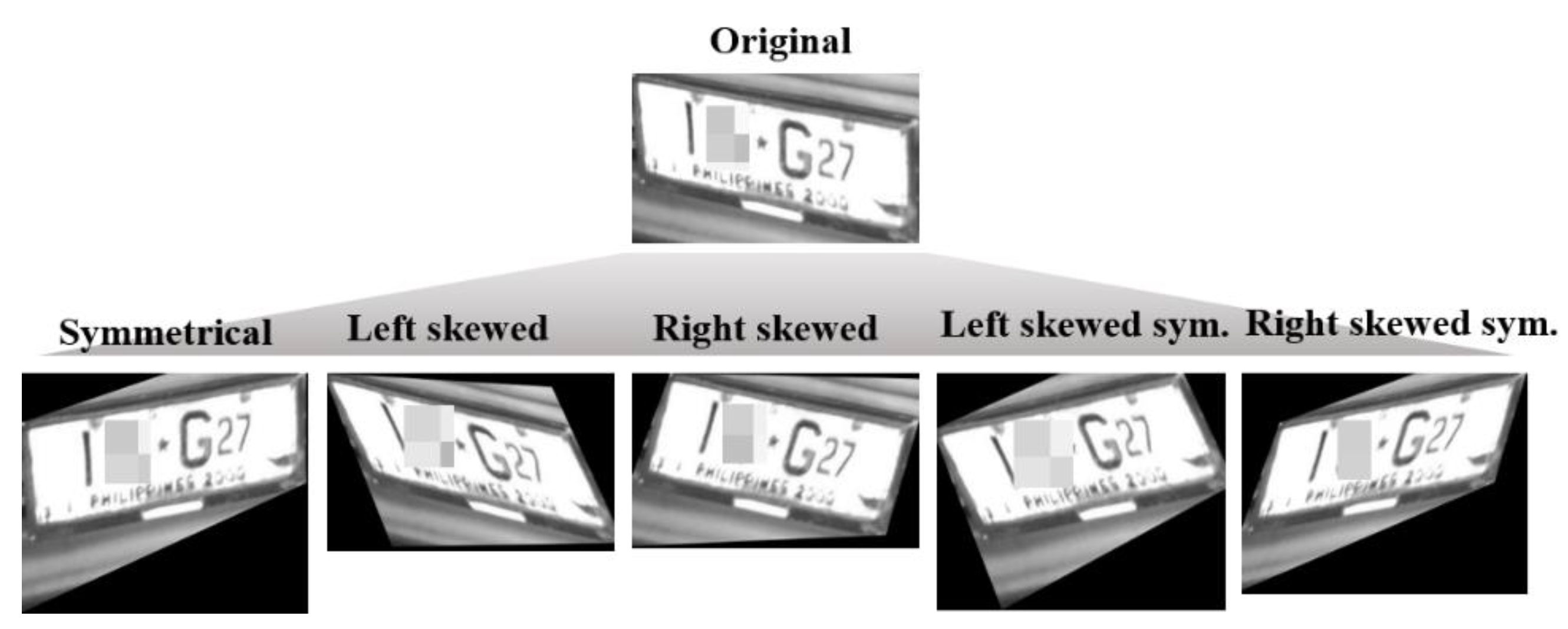
We split the data set by a ratio of 8:2, resulting in 909 images for the training set and 228 for the validation set. For training, we apply augmentation to the data set for model generalization and the diversification of plate obliqueness because most of the plate images are slanted to the right. The five types of augmentation are shown in
Figure 3; they are symmetrical transformation, skewing, or the composition of them.
We train each of the models for 500 epochs on a same GPU, using an Adam optimizer with learning rate of 0.002 and weight decay of 0.0004. We use the batch size of 32. For the models including Mobilenet, we use the implementation of reference [
24] with provided pretrained weights. Regarding the autoencoder, we train the autoencoder for 500 epochs with the data set and use only the encoder part. We implement each of the models using PyTorch [
25], and source code is available at
https://github.com/kyungkoo70/deep-plate-homography.
For performance comparison, we consider the WPOD-NET. However, it requires additional works before we can compare it with ours by the errors of predicted corners because the outputs of WPOD-NET are affine transformation that rectifies plates. Moreover, since WPOD-NET is tightly integrated into the end-to-end license plate recognition networks, it needs to be separated as an independent module. To calculate four-corner positions of WPOD-NET, we use an indirect way that applies the inverse matrix of the affine transformation to the four corners of rectified plates. The four corners are known because they can be calculated from ground truth corner positions. Even though it is not the perfect comparison because of errors induced during transformation, it is the best workaround to our knowledge.
Table 1 shows the average L2 distance of the predicted corners from ground truth depending on
. Since normalized coordinates are used, the results are extremely small. We observe that the hybrid model achieves the best result, 1.25 × 10
−2 at
among the considered models. The hybrid outperforms WPOD-NET by 0.04 × 10
−2, which is 3.1% improvement. On other values of
as well, we find the hybrid is superior to other models except WPOD-NET. From the results of extreme
such as 0.0 and 1.0, we infer that the pixel-wise losses is not effective as the coordinate error based losses. However, the pixel-wise loss is complementary to the position-wise loss because it operates on the image level, exploiting nongeometric information such as intensity and illumination.
Figure 4 shows tilted plates in the first row and the corresponding rectification results by using the homography based on the four-corner predictions from the hybrid model in the second row. We find that the results are mostly consistent, proving that the predicted corner locations match with actual plate corners. We also observe that the blur of the plate boundaries does not affect the outcome, implicitly showing the robustness of the model against the boundary variation.
Figure 5 shows the sizes of the proposed models. We observe the hybrid models including Mobilenet are smaller than others except the hybrid-feature model. It is approximately 27 times bigger than the hybrid, the hybrid-dropout, and the hybrid-encoder. The baseline is approximately 22 times larger than the three small-sized models. Their huge sizes are attributed to the high dimensionality of the outputs of the convolution layers.
Author Contributions
Conceptualization, K.J. and H.Y.; methodology, K.J.; software, K.J. and H.Y.; validation, K.J. and H.Y.; formal analysis, K.J.; investigation, K.J.; resources, K.J. and H.Y.; data curation, K.J. and H.Y.; writing—original draft preparation, K.J. and H.Y.; writing—review and editing, K.J. and H.Y.; visualization, K.J. and H.Y.; supervision, K.J.; project administration, K.J.; funding acquisition, K.J. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by Incheon National University Research Grant in 2014 (No. 2014-1043).
Conflicts of Interest
The authors declare no conflict of interest.
References
- Tian, Z.; Huang, W.; He, T.; He, P.; Qiao, Y. Detecting text in natural image with connectionist text proposal network. In Proceedings of the European Conference on Computer Vision, Amsterdam, The Netherlands, 11–14 October 2016; Springer: Berlin, Germany, 2016; pp. 56–72. [Google Scholar]
- Li, H.; Shen, C. Reading car license plates using deep convolutional neural networks and lstms. arXiv 2016, arXiv:1601.05610. [Google Scholar]
- Masood, S.Z.; Shu, G.; Dehghan, A.; Ortiz, E.G. License plate detection and recognition using deeply learned convolutional neural networks. arXiv 2017, arXiv:1703.07330. [Google Scholar]
- Naimi, A.; Kessentini, Y.; Hammami, M. Multi-nation and multi-norm license plates detection in real traffic surveillance environment using deep learning. In Proceedings of the International Conference on Neural Information Processing, Kyoto, Japan, 16–21 October 2016; Springer: Berlin, Germany, 2016; pp. 462–469. [Google Scholar]
- Rafique, M.A.; Pedrycz, W.; Jeon, M. Vehicle license plate detection using region-based convolutional neural networks. Soft Comput. 2018, 22, 6429–6440. [Google Scholar] [CrossRef]
- Girshick, R. Fast R-CNN object detection with Caffe. Microsoft Res. 2015. Available online: https://tutorial.caffe.berkeleyvision.org/caffe-cvpr15-detection.pdf (accessed on 1 February 2020).
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You only look once: Unified, real-time object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 779–788. [Google Scholar]
- Xie, L.; Ahmad, T.; Jin, L.; Liu, Y.; Zhang, S. A new CNN-based method for multi-directional car license plate detection. IEEE Trans. Intell. Transp. Syst. 2018, 19, 507–517. [Google Scholar] [CrossRef]
- Zhuang, J.; Hou, S.; Wang, Z.; Zha, Z. Towards human-level license plate recognition. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 306–321. [Google Scholar]
- Gonçalves, G.R.; Diniz, M.A.; Laroca, R.; Menotti, D.; Schwartz, W.R. Multi-task learning for low-resolution license plate recognition. In Iberoamerican Congress on Pattern Recognition, Havana, Cuba, 28–31 October 2019; Springer: Berlin, Germany, 2019; pp. 251–261. [Google Scholar]
- Lee, Y.; Jun, J.; Hong, Y.; Jeon, M. Practical License Plate Recognition in Unconstrained Surveillance Systems with Adversarial Super-Resolution. arXiv 2019, arXiv:1910.04324. [Google Scholar]
- Montazzolli Silva, S.; Rosito Jung, C. License plate detection and recognition in unconstrained scenarios. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 580–596. [Google Scholar]
- Kim, K.K.; Kim, K.I.; Kim, J.B.; Kim, H.J. Learning-based approach for license plate recognition. In Neural Networks for Signal Processing X, Proceedings of the IEEE Signal Processing Society Workshop (Cat. No. 00TH8501), Sydney, Australia, 11–13 December 2000; IEEE: Piscataway, NJ, USA, 2000; pp. 614–623. [Google Scholar]
- Anagnostopoulos, C.E.; Anagnostopoulos, I.E.; Psoroulas, I.D.; Loumos, V.; Kayafas, E. License plate recognition from still images and video sequences: A survey. IEEE Trans. Intell. Transp. Syst. 2008, 9, 377–391. [Google Scholar] [CrossRef]
- Hsu, G.; Chen, J.; Chung, Y. Application-oriented license plate recognition. IEEE Trans. Veh. Technol. 2012, 62, 552–561. [Google Scholar] [CrossRef]
- Zhu, S.; Dianat, S.A.; Mestha, L.K. End-to-end system of license plate localization and recognition. J. Electron. Imaging 2015, 24, 023020. [Google Scholar] [CrossRef]
- Dorbe, N.; Jaundalders, A.; Kadikis, R.; Nesenbergs, K. FCN and LSTM based computer vision system from recognition of vehicle type, license plate number, and registration country. Autom. Control Compu. Sci. 2018, 52.2, 146–154. [Google Scholar] [CrossRef]
- Bulan, O.; Kozitsky, V.; Ramesh, P.; Shreve, M. Segmentation-and annotation-free license plate recognition with deep localization and failure identification. IEEE Trans. Intell. Transp. Syst. 2017, 18, 2351–2363. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Lee, Y.; Lee, J.; Ahn, H.; Jeon, M. SNIDER: Single Noisy Image Denoising and Rectification for Improving License Plate Recognition. In Proceedings of the IEEE International Conference on Computer Vision Workshops, Seoul, Korea, 27–28 October 2019. [Google Scholar]
- Sandler, M.; Howard, A.; Zhu, M.; Zhmoginov, A.; Chen, L. Mobilenetv2: Inverted residuals and linear bottlenecks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 4510–4520. [Google Scholar]
- Tan, M.; Chen, B.; Pang, R.; Vasudevan, V.; Sandler, M.; Howard, A.; Le, Q.V. Mnasnet: Platform-aware neural architecture search for mobile. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 16–20 June 2019; pp. 2820–2828. [Google Scholar]
- Redmon, J.; Farhadi, A. Yolov3: An incremental improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Mobilenet V2. Available online: https://github.com/pytorch/vision/blob/master/torchvision/models/mobilenet.py (accessed on 1 February 2020).
- Paszke, A.; Gross, S.; Massa, F.; Lerer, A.; Bradbury, J.; Chanan, G.; Killeen, T.; Lin, Z.; Gimelshein, N.; Antiga, L. PyTorch: An imperative style, high-performance deep learning library. In Proceedings of the Advances in Neural Information Processing Systems, Vancouver, BC, Canada, 8–14 December 2019; pp. 8024–8035. [Google Scholar]
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}