Mode Awareness and Automated Driving—What Is It and How Can It Be Measured?

{kind=link}
{kind=link}
{kind=link}
Abstract
:1. The Relevance of Automation
2. Constructs Concerning Monitoring Behavior
2.1. Situation Awareness
2.2. Mode Awareness
2.3. Mode Confusion and Mode Errors
2.4. Mental Model
2.5. Overtrust
3. Measurement of Mode Awareness
3.1. Subjective Measurement Methods
3.2. Objective Measurement Methods
3.3. Combination of Measurement Methods
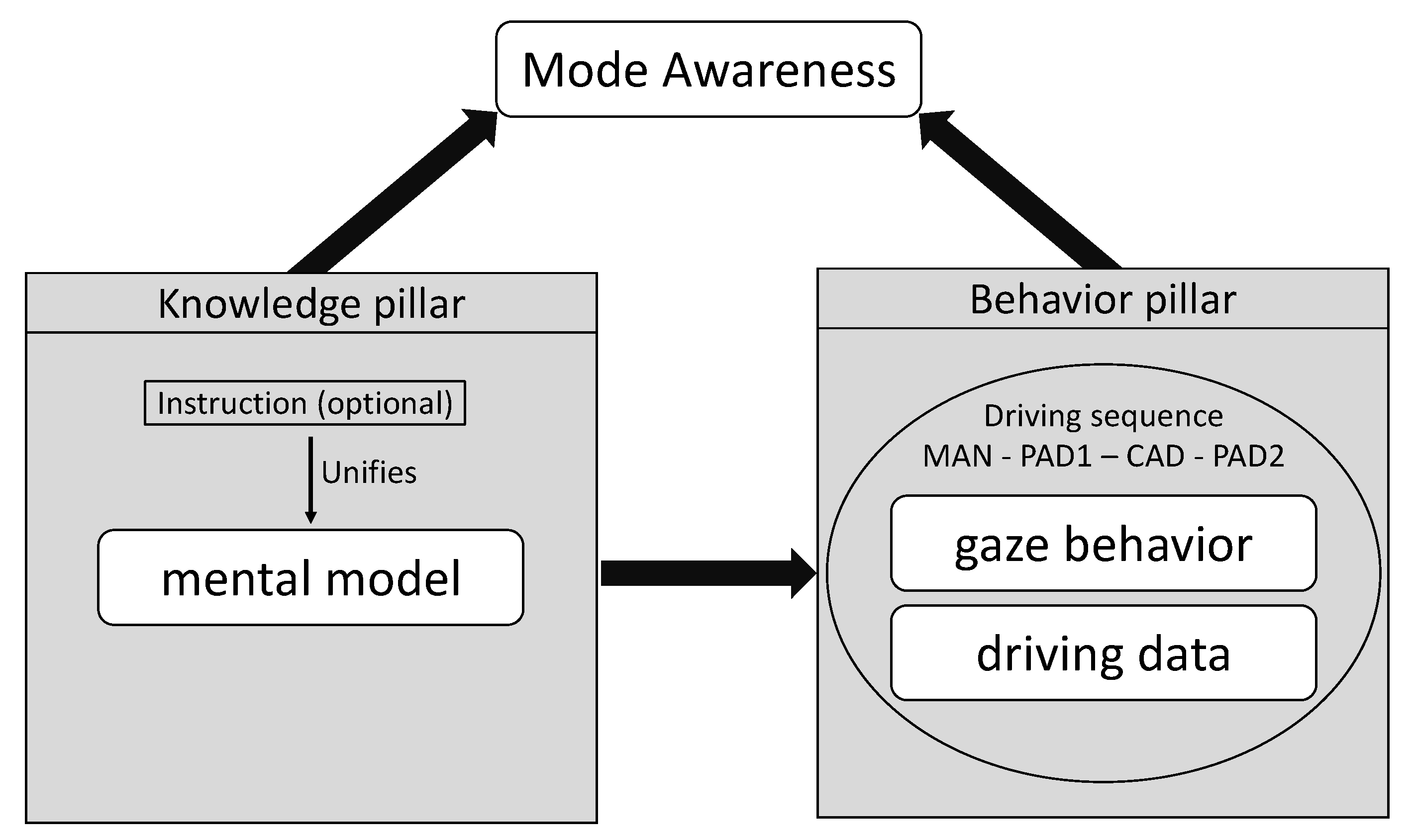
4. A Subjective and Objective Measurement Method for Mode Awareness
4.1. Knowledge Pillar
4.2. Behavior Pillar
4.2.1. Design
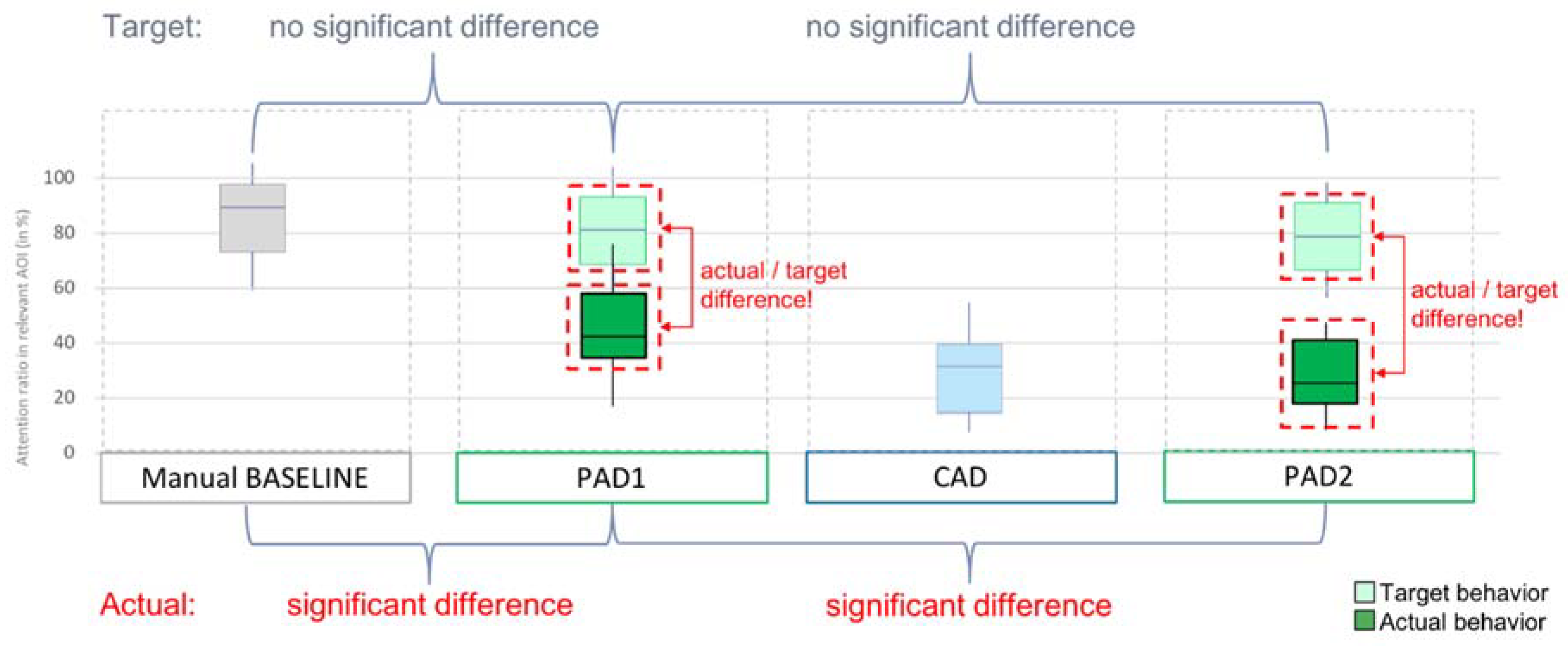
4.2.2. Attention Ratio
4.2.3. Target and Actual Values
4.2.4. Controllability
4.3. Additional Variables
5. Limitations and Benefits
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Fagnant, D.J.; Kockelman, K. Preparing a nation for autonomous vehicles: Opportunities, barriers and policy recommendations. Transp. Res. Part A Pol. Practice 2015, 77, 167–181. [Google Scholar] [CrossRef]
- Treat, J.; Tumbas, N.; McDonald, S.; Shinar, D.; Hume, R. Tri-Level Study of the Causes of Traffic Accidents. Executive Summary; U.S. Department of Transportation: Washington, DC, USA, 1979; pp. 1–328.
- SAE International. Taxonomy and Definitions for Terms Related to Driving Automation Systems for on-Road Motor Vehicles; SAE International: Warrendale, PA, USA, 2018. [Google Scholar]
- Endsley, M.R. From here to autonomy: Lessons learned from human-automation research. Hum. Factors 2017, 59, 5–27. [Google Scholar] [CrossRef] [PubMed]
- Feldhütter, A.; Segler, C.; Bengler, K. Does shifting between conditionally and partially automated driving lead to a loss of mode awareness? In Proceedings of the International Conference on Applied Human Factors and Ergonomics, Los Angeles, CA, USA, 17–21 July 2017; Springer International Publishing: Basel, Switzerland, 2018. [Google Scholar] [CrossRef]
- Sarter, N.B.; Woods, D.D. How in the world did we ever get into that mode? Mode error and awareness in supervisory control. Hum. Factors 1995, 37, 5–19. [Google Scholar] [CrossRef]
- Strauch, B. Ironies of automation: Still unresolved after all these years. IEEE T. Hum.-Mach. Syst. 2017, 48, 419–433. [Google Scholar] [CrossRef]
- Bainbridge, L. Ironies of automation. IFAC Proc. Vol. 1983, 15, 129–135. [Google Scholar] [CrossRef]
- Kurpiers, C.; Lechner, D.; Raisch, F. The influence of a gaze direction based attention request to maintain mode awareness. In Proceedings of the 26th International Technical Conference on the Enhanced Safety of Vehicles, Eindhoven, The Netherlands, 10–13 June 2019. [Google Scholar]
- Naujoks, F.; Purucker, C.; Neukum, A.; Wolter, S.; Steiger, R. Controllability of partially automated driving functions—Does it matter whether drivers are allowed to take their hands off the steering wheel? Transp. Res. Part A Traff. Psych. Beh. 2015, 35, 185–198. [Google Scholar] [CrossRef]
- Boos, A. Habituation Effects in Automated Driving: The Influences of Exposure Duration and Exposure Frequency on Visual Monitoring Behaviour. Master’s Thesis, Technical University Munich, Munich, Germany, 2018. [Google Scholar]
- Endsley, M.R. Toward a theory of situation awareness in dynamic systems. Hum. Factors 1995, 37, 32–64. [Google Scholar] [CrossRef]
- Endsley, M.R.; Kiris, E.O. The out-of-the-loop performance problem and level of control in automation. Hum. Factors 1995, 37, 381–394. [Google Scholar] [CrossRef]
- Kaber, D.B.; Endsley, M.R. The effects of level of automation and adaptive automation on human performance, situation awareness and workload in a dynamic control task. Theor. Issues Ergon. 2004, 5, 113–153. [Google Scholar] [CrossRef]
- Gold, C.; Damböck, D.; Lorenz, L.; Bengler, K. “Take over!” How long does it take to get the driver back into the loop? In Proceedings of the Human Factors and Ergonomics Society Annual Meeting, San Diego, CA, USA, 30 September–4 October 2013; Sage Publications Sage CA: Los Angeles, CA, USA, 2013. [Google Scholar] [CrossRef] [Green Version]
- Monk, A. Mode errors: A user-centred analysis and some preventative measures using keying-contingent sound. J. Man.-Mach. Stud. 1986, 24, 313–327. [Google Scholar] [CrossRef]
- Kolbig, M.; Müller, S. Mode Awareness im Fahrkontext: Eine theoretische Betrachtung. In Proceedings of the 10. Berlinger Werkstatt Mensch-Maschine Systeme, Berlin, Germany, 10–12 October 2013; Brandenburg, E., Doria, L., Gross, A., Günzler, T., Smieszek, H., Eds.; Universitätsverlag der TU Berlin: Berlin, Germany, 2013. [Google Scholar]
- Othersen, I. Vom Fahrer zum Denker und Teilzeitlenker; Springer: Berlin/Heidelberg, Germany, 2016. [Google Scholar] [CrossRef]
- Bredereke, J.; Lankenau, A. Safety-relevant mode confusions—Modelling and reducing them. Reliab. Eng. Syst. Safe. 2005, 88, 229–245. [Google Scholar] [CrossRef]
- Bredereke, J.; Lankenau, A. A rigorous view of mode confusion. In Proceedings of the International Conference on Computer Safety, Reliability, and Security, Catania, Italy, 10–13 September 2002; Anderson, S., Felici, M., Bologna, S., Eds.; Springer: Berlin/Heidelberg, Germany, 2002. [Google Scholar] [CrossRef]
- Sarter, N. Investigating mode errors on automated flight decks: Illustrating the problem-driven, cumulative, and interdisciplinary nature of human factors research. Hum. Factors 2008, 50, 506–510. [Google Scholar] [CrossRef] [PubMed]
- Dekker, S. The field Guide to Understanding Human Error, 3rd ed.; Ashgate Publishing Ltd.: Aldershot, UK, 2006. [Google Scholar]
- Lindberg, T. Entwicklung Einer ABK-Metapher für Gruppierte Fahrerassistenzsysteme; Dr. Hut: Berlin, Germany, 2012; pp. 1–329. [Google Scholar]
- Rettenmaier, M. Mode Awareness im Fahrzeug: Absicherung von hochautomatisiertem Fahren. Master’s Thesis, Technical University Munich, Munich, Germany, 2017. [Google Scholar]
- Lee, J.D.; See, K.A. Trust in automation: Designing for appropriate reliance. Hum. Factors 2004, 46, 50–80. [Google Scholar] [CrossRef] [PubMed]
- Parasuraman, R.; Riley, V. Humans and automation: Use, misuse, disuse, abuse. Hum. Factors 1997, 39, 230–253. [Google Scholar] [CrossRef]
- Martinez von Bülow, R.; Raisch, F. Driver assistance systems: Highly automated driving—Acceptance and benefit for customers. In Proceedings of the VDA Technical Congress, Berlin, Germany, 27–28 February 2018. [Google Scholar]
- Van Loon, R.J.; Martens, M.H. Automated driving and its effect on the safety ecosystem: How do compatibility issues affect the transition period? Procedia Manuf. 2015, 3, 3280–3285. [Google Scholar] [CrossRef] [Green Version]
- Hergeth, S.; Lorenz, L.; Vilimek, R.; Krems, J.F. Keep your scanners peeled: Gaze behavior as a measure of automation trust during highly automated driving. Hum. Factors 2016, 58, 509–519. [Google Scholar] [CrossRef]
- Parasuraman, R.; Manzey, D.H. Complacency and bias in human use of automation: An attentional integration. Hum. Factors 2010, 52, 381–410. [Google Scholar] [CrossRef]
- Moray, N.; Inagaki, T. Attention and complacency. Theor. Issues Ergon. 2000, 1, 354–365. [Google Scholar] [CrossRef]
- Manzey, D.; Reichenbach, J.; Onnasch, L. Human performance consequences of automated decision aids: The impact of degree of automation and system experience. J. Cogn. Eng. Decis. Mak. 2012, 6, 57–87. [Google Scholar] [CrossRef]
- Forster, Y.; Naujoks, F.; Neukum, A. Your turn or my turn? Design of a human-machine interface for conditional automation. In Proceedings of the 8th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Ann Arbor, MI, USA, 24–26 October 2016. [Google Scholar] [CrossRef]
- Naujoks, F.; Purucker, C.; Wiedemann, K.; Neukum, A.; Wolter, S.; Steiger, R. Driving performance at lateral system limits during partially automated driving. Accid. Anal. Prev. 2017, 108, 147–162. [Google Scholar] [CrossRef]
- Kromann, C.B.; Jensen, M.L.; Ringsted, C. The effect of testing on skills learning. Med. Educ. 2009, 43, 21–27. [Google Scholar] [CrossRef] [PubMed]
- Banks, V.A.; Stanton, N.A. Discovering driver-vehicle coordination problems in future automated control systems: Evidence from verbal commentaries. Procedia Manuf. 2015, 3, 2497–2504. [Google Scholar] [CrossRef] [Green Version]
- Endsley, M.R. Autonomous driving systems: A preliminary naturalistic study of the Tesla Model S. J. Cogn. Eng. Decis. Mak. 2017, 11, 225–238. [Google Scholar] [CrossRef]
- Klauer, S.G.; Dingus, T.A.; Neale, V.L.; Sudweeks, J.D.; Ramsey, D.J. The impact of driver inattention on near-crash/crash risk: An analysis using the 100-car naturalistic driving study data. NHTSA 2006, 594. [Google Scholar] [CrossRef] [Green Version]
- Naujoks, F.; Befelein, D.; Wiedemann, K.; Neukum, A. A review of non-driving-related tasks used in studies on automated driving. In Proceedings of the International Conference on Applied Human Factors and Ergonomics, Prague, Czech Republic, 26–28 October 2016; Naujoks, F., Befelein, D., Wiedemann, K., Neukum, A., Eds.; Springer International Publishing: Basel, Switzerland, 2017. [Google Scholar] [CrossRef]
- Feldhütter, A.; Gold, C.; Schneider, S.; Bengler, K. How the duration of automated driving influences take-over performance and gaze behavior. In Advances in Ergonomic Design of Systems, Products and Processes; Springer: Berlin/Heidelberg, Germany, 2017; pp. 309–318. [Google Scholar] [CrossRef]
- De Winter, J.C.; Happee, R.; Martens, M.H.; Stanton, N.A. Effects of adaptive cruise control and highly automated driving on workload and situation awareness: A review of the empirical evidence. Transp. Res. Part A Traff. Psych. Beh. 2014, 27, 196–217. [Google Scholar] [CrossRef] [Green Version]
- Toffetti, A.; Wilschut, E.S.; Martens, M.H.; Schieben, A.; Rambaldini, A.; Merat, N.; Flemisch, F. CityMobil: Human factor issues regarding highly automated vehicles on eLane. Transp. Res. Rec. 2009, 2110, 1–8. [Google Scholar] [CrossRef] [Green Version]
- Victor, T.W.; Tivesten, E.; Gustavsson, P.; Johansson, J.; Sangberg, F.; Ljung Aust, M. Automation expectation mismatch: Incorrect prediction despite eyes on threat and hands on wheel. Hum. Factors 2018, 60, 1095–1116. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Söffker, D. Bridging gaps among human, assisted, and automated driving with DVIs: A conceptional experimental study. IEEE T. Intell. Transp. Syst. 2018, 20, 2096–2108. [Google Scholar] [CrossRef]
- Wickens, C.D. Attention to safety and the psychology of surprise. In Proceedings of the 2001 Symposium on Aviation Psychology, Columbus, OH, USA, 5–8 March 2001. [Google Scholar]
- Körber, M.; Cingel, A.; Zimmermann, M.; Bengler, K. Vigilance decrement and passive fatigue caused by monotony in automated driving. Procedia Manuf. 2015, 3, 2403–2409. [Google Scholar] [CrossRef] [Green Version]
- Feldhütter, A.; Härtwig, N.; Kurpiers, C.; Hernandez, J.M.; Bengler, K. Effect on mode awareness when changing from conditionally to partially automated driving. In Proceedings of the Congress of the International Ergonomics Association, Florence, Italy, 26–30 August 2019; Springer: Berlin/Heidelberg, Germany, 2019. [Google Scholar] [CrossRef]
- Crundall, D.E.; Underwood, G. Effects of experience and processing demands on visual information acquisition in drivers. Ergonomics 1998, 41, 448–458. [Google Scholar] [CrossRef]
- Land, M.F.; Lee, D.N. Where we look when we steer. Nature 1994, 369, 742–744. [Google Scholar] [CrossRef] [PubMed]
- Recarte, M.A.; Nunes, L.M. Effects of verbal and spatial-imagery tasks on eye fixations while driving. J. Exp. Psychol. Appl. 2000, 6, 31–43. [Google Scholar] [CrossRef] [PubMed]
- Summala, H.; Nieminen, T.; Punto, M. Maintaining lane position with peripheral vision during in-vehicle tasks. Hum. Factors 1996, 38, 442–451. [Google Scholar] [CrossRef]
- Jian, J.-Y.; Bisantz, A.M.; Drury, C.G. Foundations for an empirically determined scale of trust in automated systems. Int. J. Cogn. Ergon. 2000, 4, 53–71. [Google Scholar] [CrossRef]
- Madsen, M.; Gregor, S. Measuring human-computer trust. In Proceedings of the 11th Australasian Conference on Information Systems, Brisbane, Australia, 6–8 December 2000. [Google Scholar]
- Åkerstedt, T.; Gillberg, M. Subjective and objective sleepiness in the active individual. Int. J. Neurosci. 1990, 52, 29–37. [Google Scholar] [CrossRef]



© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kurpiers, C.; Biebl, B.; Mejia Hernandez, J.; Raisch, F. Mode Awareness and Automated Driving—What Is It and How Can It Be Measured? Information 2020, 11, 277. https://doi.org/10.3390/info11050277
Kurpiers C, Biebl B, Mejia Hernandez J, Raisch F. Mode Awareness and Automated Driving—What Is It and How Can It Be Measured? Information. 2020; 11(5):277. https://doi.org/10.3390/info11050277
Chicago/Turabian StyleKurpiers, Christina, Bianca Biebl, Julia Mejia Hernandez, and Florian Raisch. 2020. "Mode Awareness and Automated Driving—What Is It and How Can It Be Measured?" Information 11, no. 5: 277. https://doi.org/10.3390/info11050277
APA StyleKurpiers, C., Biebl, B., Mejia Hernandez, J., & Raisch, F. (2020). Mode Awareness and Automated Driving—What Is It and How Can It Be Measured? Information, 11(5), 277. https://doi.org/10.3390/info11050277