Prediction Framework with Kalman Filter Algorithm


Abstract
:1. Introduction
2. Materials and Methods
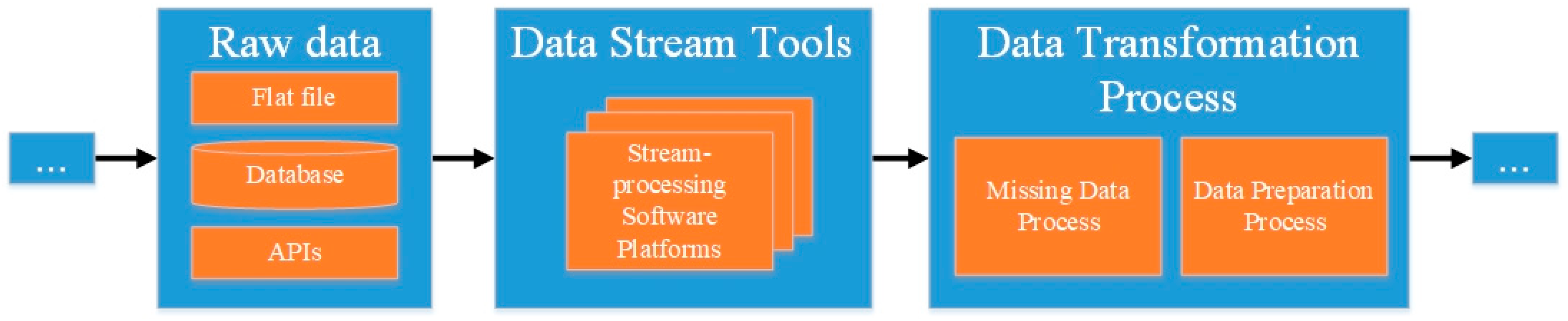
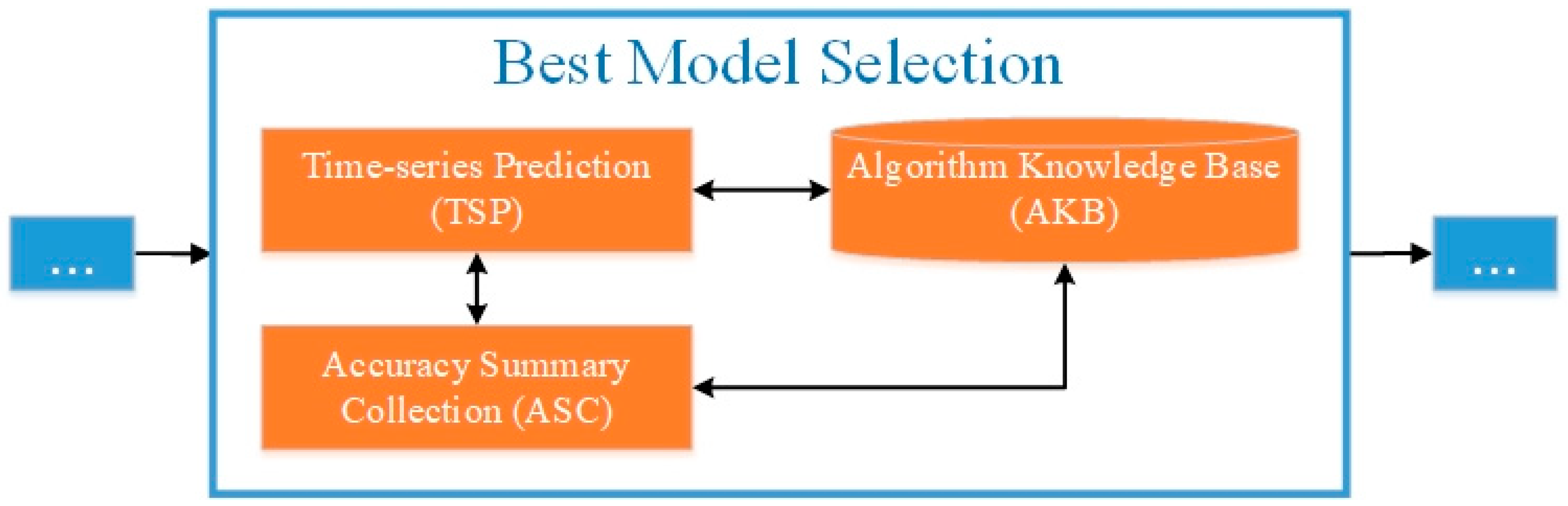
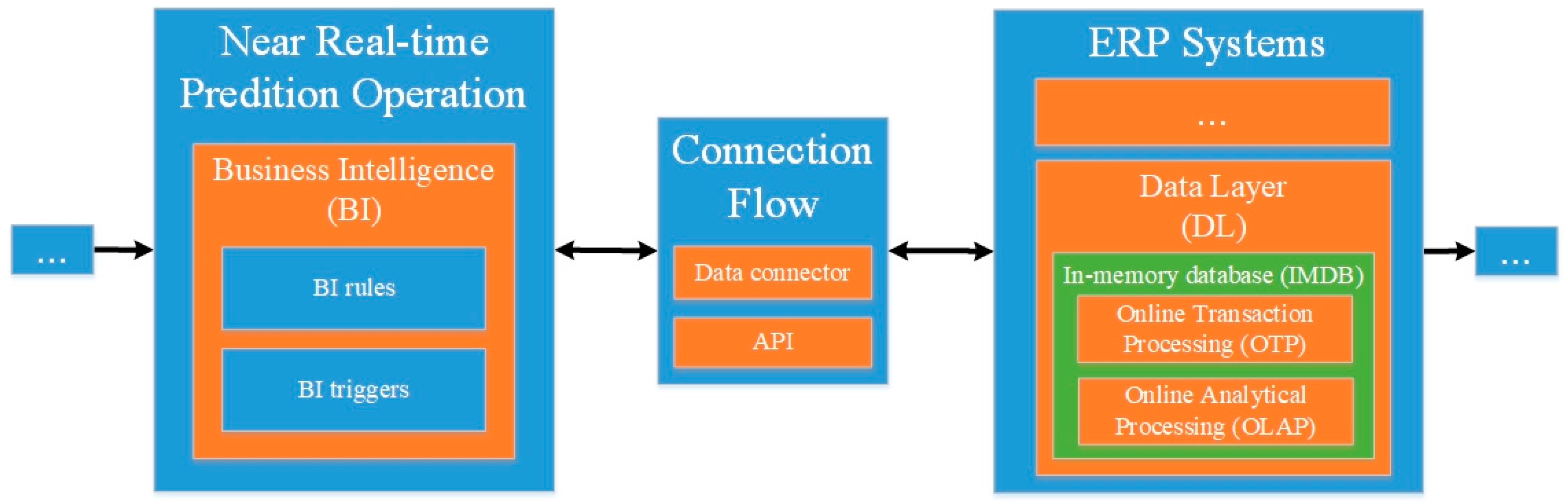
2.1. Autonomous Open Data Prediction Framework (AODPF)
2.2. Case Study on Road Maintenance Using a Kalman Filter Approach
- Prediction:
- Update step:where and are predicted state mean and covariance, respectively, on the time step k before seeing the measurement. is vector, where k is the size of the state. is the control–input model which controls are applied vector . is mean of the value on time step k. the observation noise of the remaining calculation over the period k. covariance matrices prediction of calculation of the time step covariance k. the optimal Kalman gain filter how much the predictions will be corrected in time step k. is updated state covariance. is updated estimate covariance and lastly measurement post-fit residual [15].
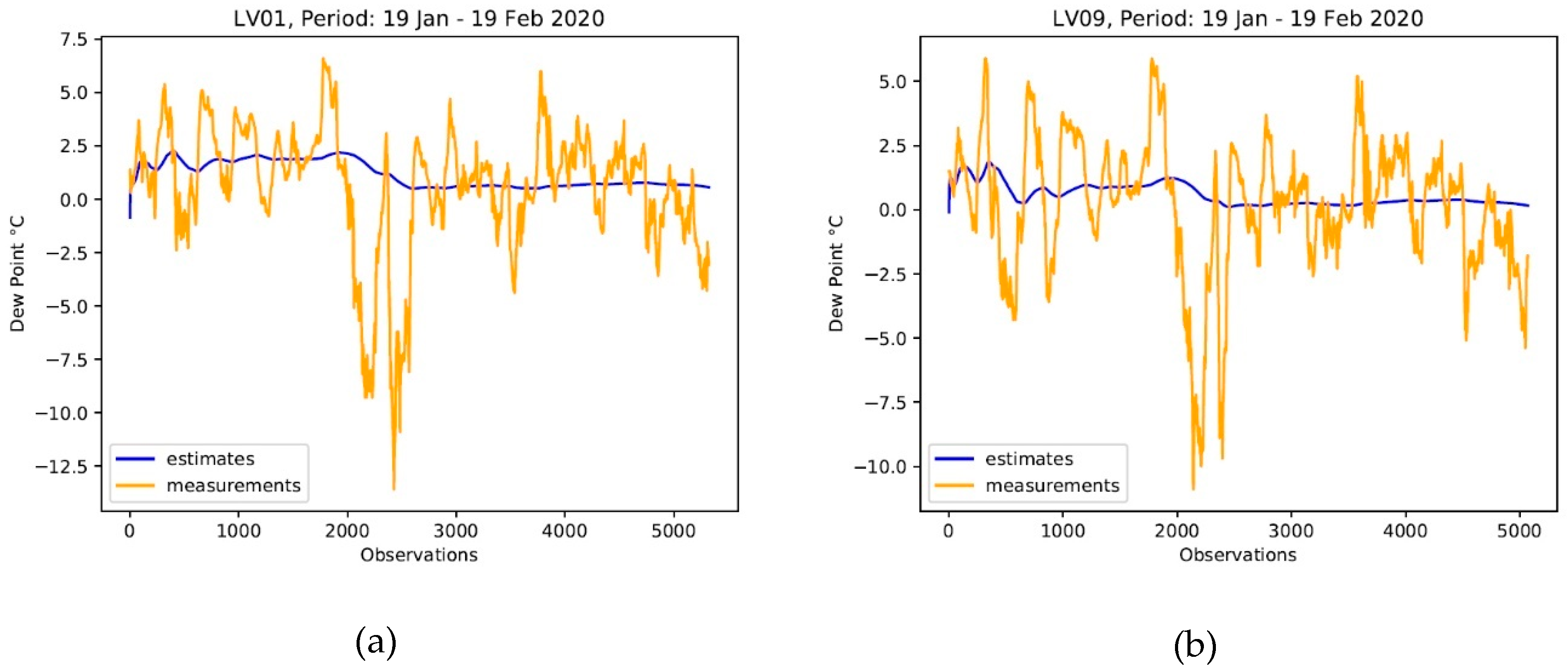
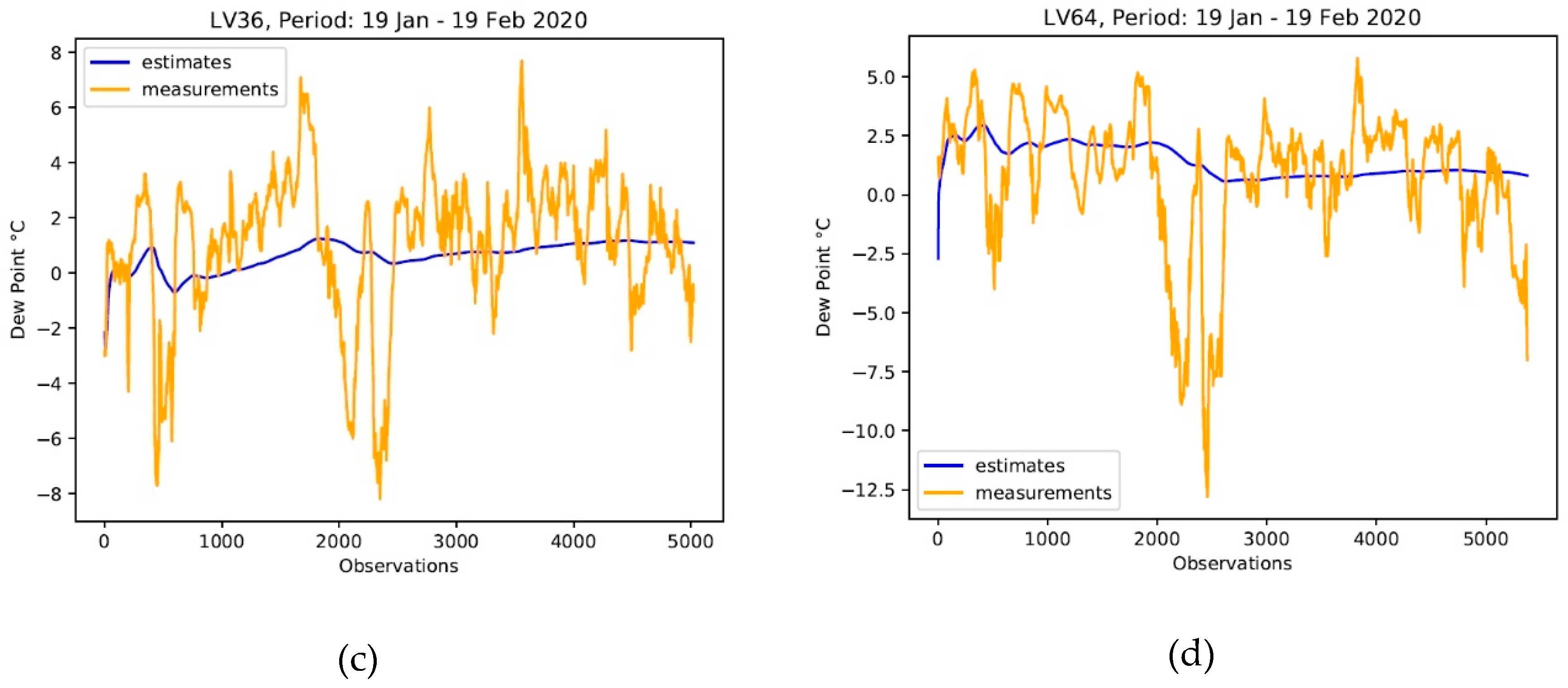
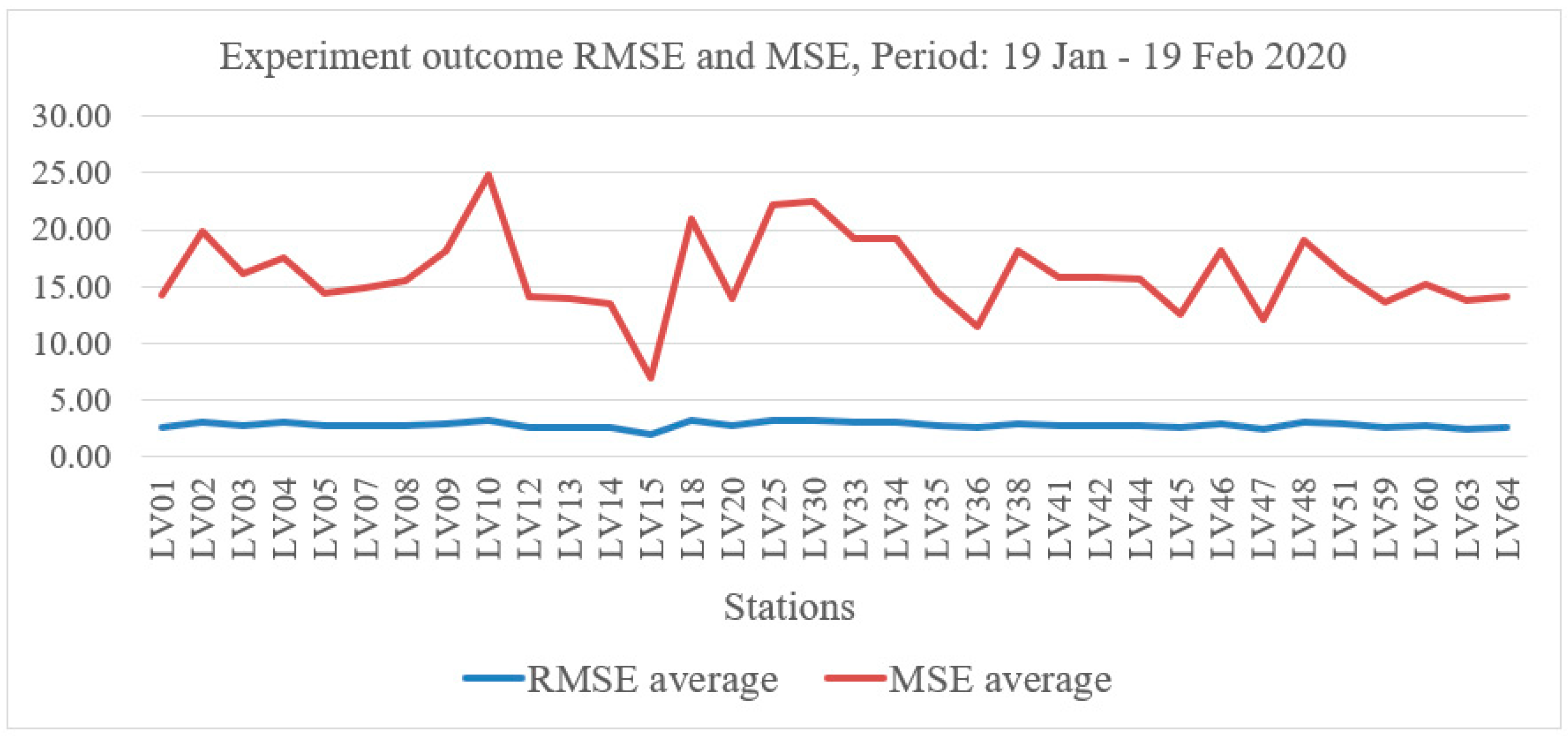
3. Results
4. Conclusions
Supplementary Materials
Funding
Acknowledgments
Conflicts of Interest
References
- Holsapple, C.W.; Sena, M.P. ERP plans and decision-support benefits. Decis. Support Syst. 2005, 38, 575–590. [Google Scholar] [CrossRef]
- Bahrami, B.; Jordan, E. Utilizing Enterprise Resource Planning in Decision-Making Processes. In Innovation and Future of Enterprise Information Systems; Springer: Berlin/Heidelberg, Germany, 2013; pp. 153–168. [Google Scholar]
- O’Leary, D.E. Supporting decisions in real-time enterprises: Autonomic supply chain systems. Inf. Syst. e-Bus. Manag. 2008, 6, 239–255. [Google Scholar] [CrossRef]
- Aslan, B.; Stevenson, M.; Hendry, L.C. Enterprise Resource Planning systems: An assessment of applicability to Make-To-Order companies. Comput. Ind. 2012, 63, 692–705. [Google Scholar] [CrossRef] [Green Version]
- Peksa, J.; Grabis, J. Integration of Decision-Making Components in ERP Systems. In Proceedings of the 20th International Conference on Enterprise Information Systems; Scitepress: Funchal, Madeira, Portugal, 2018; Volume 1, pp. 183–189. [Google Scholar]
- Grabis, J.; Bondars, Ž.; Kampars, J.; Dobelis, Ē.; Zaharčukovs, A. Context-Aware Customizable Routing Solution for Fleet Management. In Proceedings of the 19th International Conference on Enterprise Information Systems; Scitepress: Porto, Portugal, 2017; Volume 1, pp. 638–645. [Google Scholar]
- Pindyck, R.S.; Rubinfeld, D.L. Econometric Models and Economic Forecasts, 3rd ed.; McGraw-Hill: New York, NY, USA, 1991. [Google Scholar]
- Zdravkovic, J.; Kampars, J.; Stirna, J. Using Open Data to Support Organizational Capabilities in Dynamic Business Contexts. In Lecture Notes in Business Information Processing; Springer International Publishing: Tallinn, Estonia, 2018; Volume 316, pp. 28–39. [Google Scholar]
- Grabis, J.; Minkevica, V. Context-Aware Multi-Objective Vehicle Routing. In 31st Conference on Modelling and Simulation; European Council for Modelling and Simulation: Budapest, Hungary, 2017; pp. 235–239. [Google Scholar]
- Edwards, J.B. Speed adjustment of motorway commuter traffic to inclement weather. Transp. Res. Part F Traffic Psychol. Behav. 1999, 2, 1–14. [Google Scholar] [CrossRef]
- Peksa, J.; Peka, J. Forecasting using Contextual Data in Road Maintenance Work. In 2018 IEEE 6th Workshop on Advances in Information, Electronic and Electrical Engineering (AIEEE); IEEE: Piscataway, NJ, USA, 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Peksa, J. Autonomous Open Data Prediction Framework. In 2019 IEEE 7th IEEE Workshop on Advances in Information, Electronic and Electrical Engineering (AIEEE); IEEE: Piscataway, NJ, USA, 2019; pp. 1–5. [Google Scholar]
- Nguwi, Y.-Y.; Kouzani, A.Z. Detection and classification of road signs in natural environments. Neural Comput. Appl. 2008, 17, 265–289. [Google Scholar] [CrossRef]
- Jeffrey, S.J.; Carter, J.O.; Moodie, K.B.; Beswick, A.R. Using spatial interpolation to construct a comprehensive archive of Australian climate data. Environ. Model. Softw. 2001, 16, 309–330. [Google Scholar] [CrossRef]
- Welch, G.; Bishop, G. An Introduction to the Kalman Filter; University of North Carolina: Chapel Hill, NC, USA, 2006; Volume 6, pp. 1–16. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Stations | RMSE Average | MSE Average |
|---|---|---|
| LV01 | 2.65 | 14.27 |
| LV02 | 3.08 | 19.84 |
| LV03 | 2.77 | 16.12 |
| LV04 | 2.99 | 17.47 |
| LV05 | 2.70 | 14.45 |
| LV07 | 2.68 | 14.87 |
| LV08 | 2.77 | 15.52 |
| LV09 | 2.88 | 18.09 |
| LV10 | 3.29 | 24.83 |
| LV12 | 2.67 | 14.11 |
| LV13 | 2.66 | 13.90 |
| LV14 | 2.61 | 13.54 |
| LV15 | 1.91 | 6.98 |
| LV18 | 3.15 | 20.94 |
| LV20 | 2.70 | 13.91 |
| LV25 | 3.27 | 22.13 |
| LV30 | 3.26 | 22.50 |
| LV33 | 3.09 | 19.31 |
| LV34 | 3.12 | 19.24 |
| LV35 | 2.73 | 14.54 |
| LV36 | 2.56 | 11.53 |
| LV38 | 2.94 | 18.22 |
| LV41 | 2.80 | 15.74 |
| LV42 | 2.81 | 15.82 |
| LV44 | 2.76 | 15.68 |
| LV45 | 2.56 | 12.53 |
| LV46 | 2.98 | 18.08 |
| LV47 | 2.51 | 12.04 |
| LV48 | 3.13 | 19.05 |
| LV51 | 2.86 | 16.04 |
| LV59 | 2.65 | 13.69 |
| LV60 | 2.73 | 15.18 |
| LV63 | 2.50 | 13.74 |
| LV64 | 2.61 | 14.05 |
© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Peksa, J. Prediction Framework with Kalman Filter Algorithm. Information 2020, 11, 358. https://doi.org/10.3390/info11070358
Peksa J. Prediction Framework with Kalman Filter Algorithm. Information. 2020; 11(7):358. https://doi.org/10.3390/info11070358
Chicago/Turabian StylePeksa, Janis. 2020. "Prediction Framework with Kalman Filter Algorithm" Information 11, no. 7: 358. https://doi.org/10.3390/info11070358
APA StylePeksa, J. (2020). Prediction Framework with Kalman Filter Algorithm. Information, 11(7), 358. https://doi.org/10.3390/info11070358