Discriminant Analysis of Voice Commands in the Presence of an Unmanned Aerial Vehicle

Abstract
:1. Introduction
2. Materials and Methods
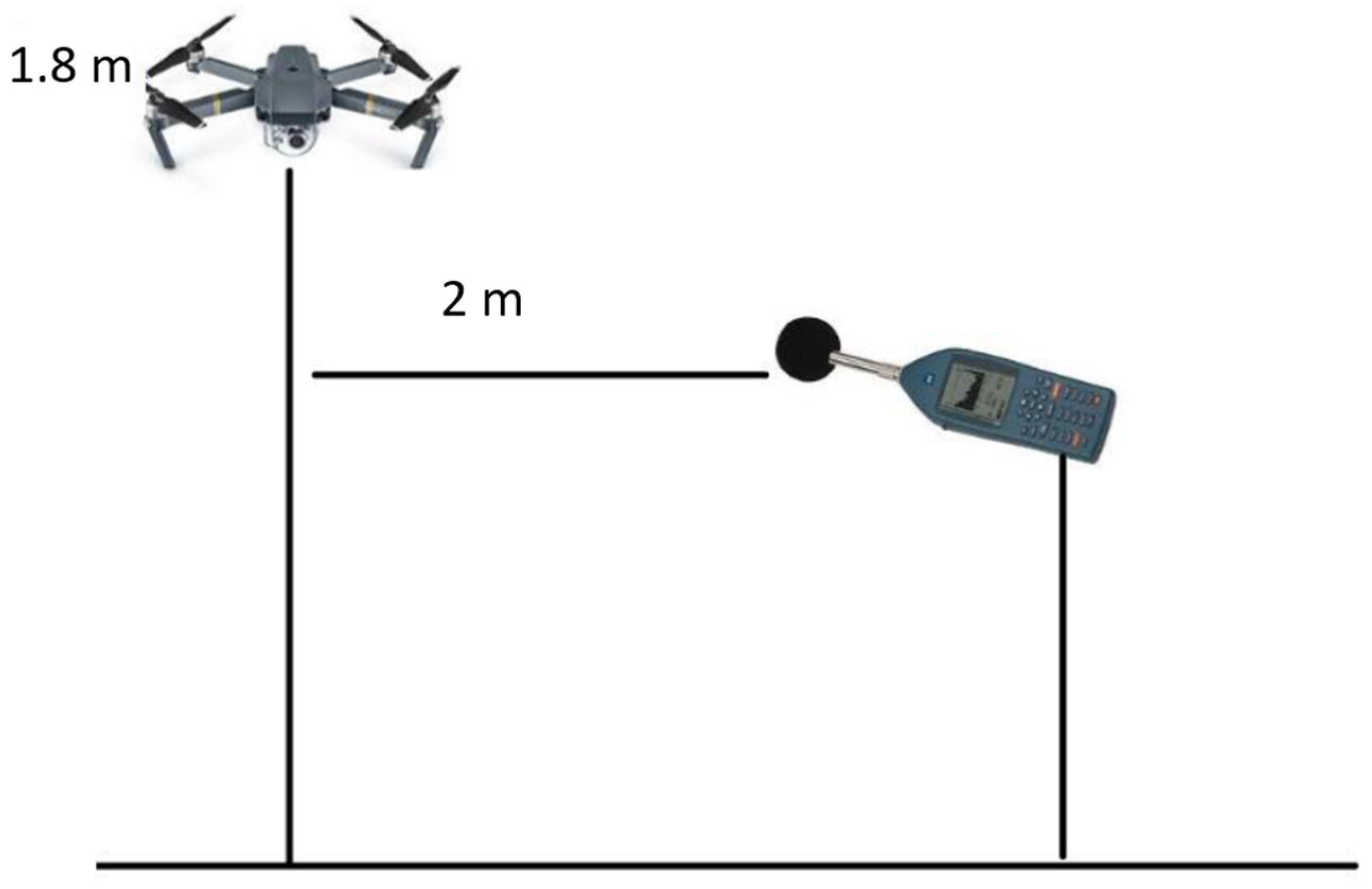
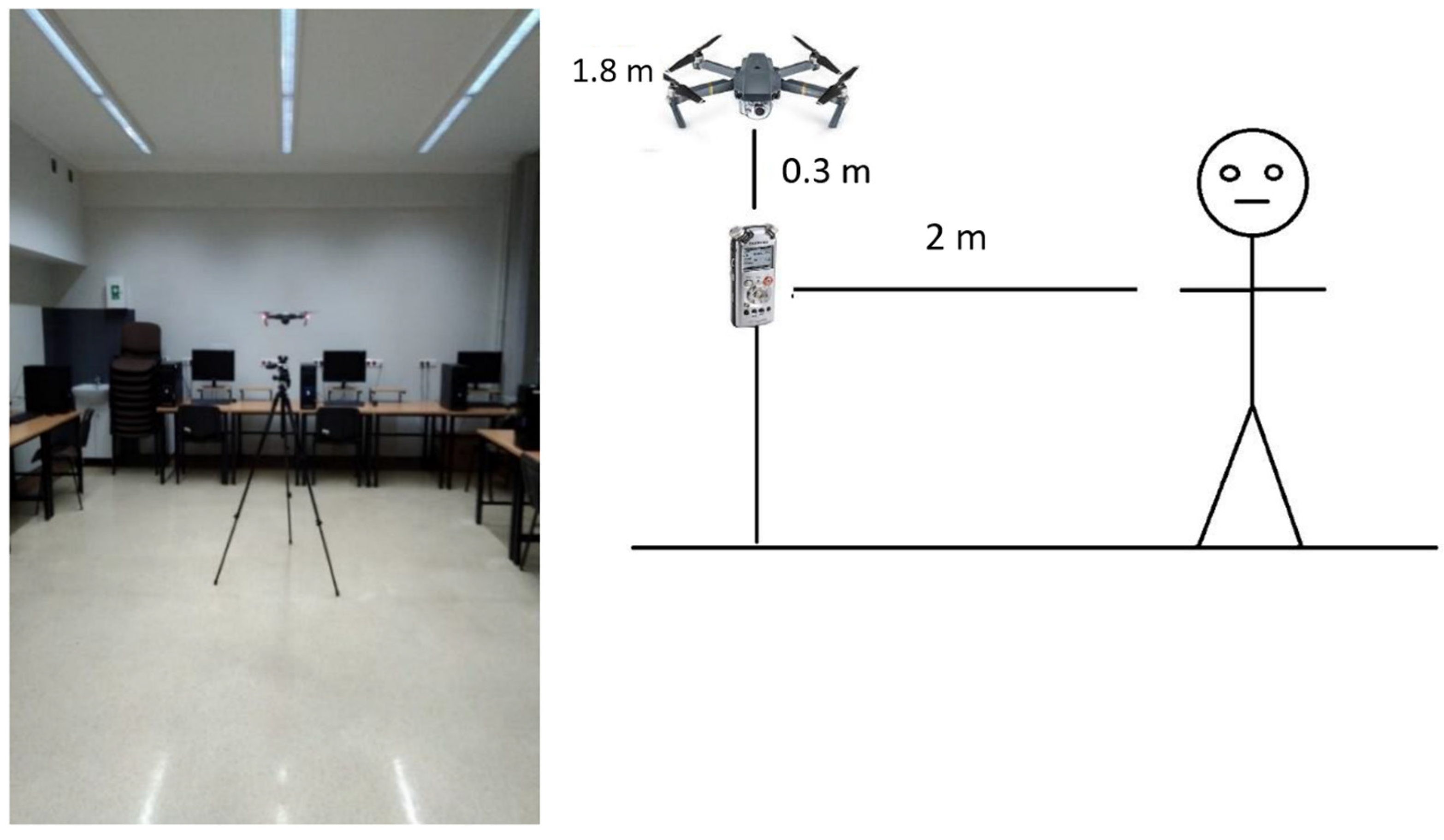
2.1. The UAV Used in the Experiment
2.2. Acoustic Parameters
2.3. Speakers and Speech Material
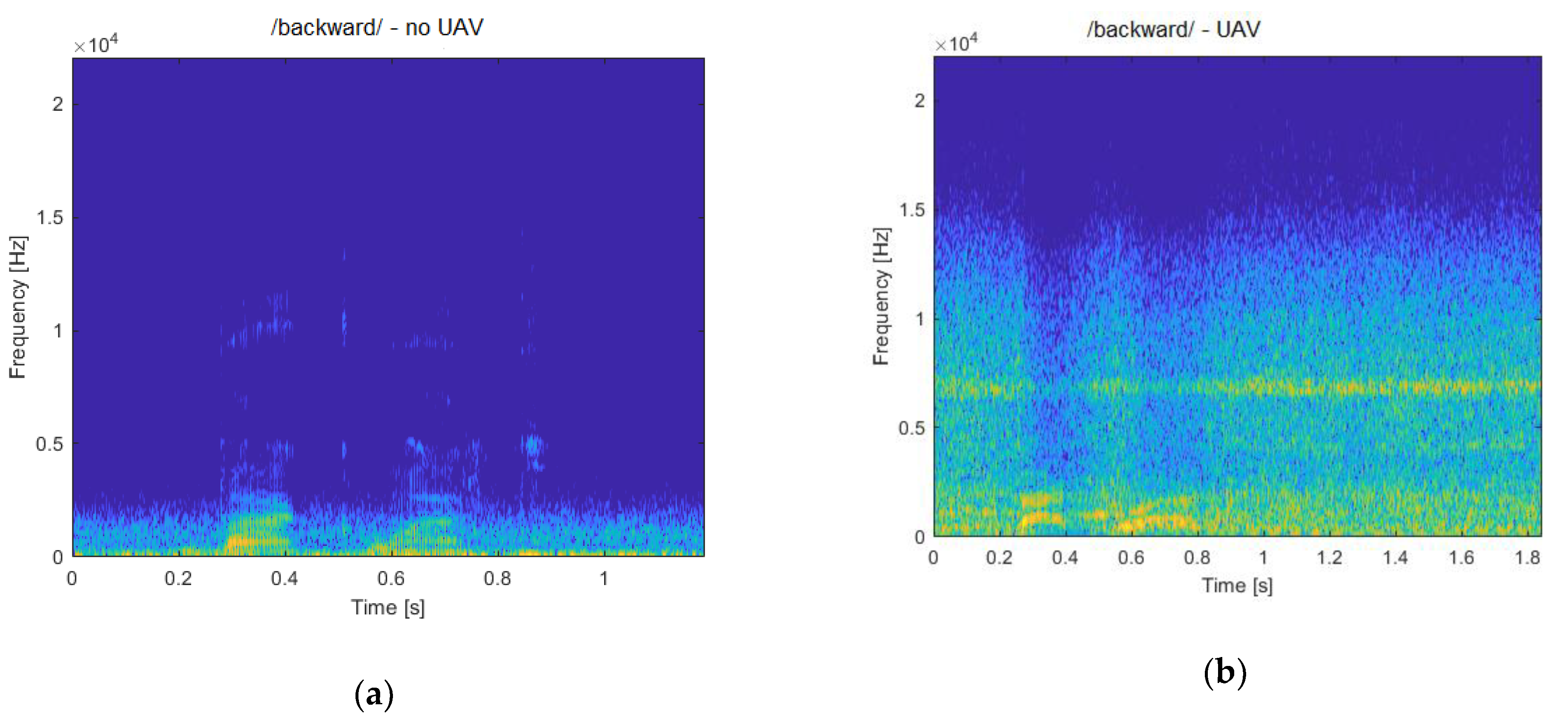
2.4. Time–Frequency Analysis
2.5. Discriminant Function Analysis
2.5.1. Mel-Frequency Cepstral Coefficients
2.5.2. Discriminant Function Analysis
3. Results
3.1. Acoustic Parameters
3.1.1. Background Sound Levels
3.1.2. Speech Intelligibility
3.2. Time–Frequency Analysis
3.3. Discriminant Function Analysis
4. Discussion
5. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- D’Oleire-Oltmanns, S.; Marzolff, I.; Peter, K.D.; Ries, J.B. Unmanned aerial vehicle (UAV) for monitoring soil erosion in Morocco. Remote Sens. 2012, 4, 3390–3416. [Google Scholar] [CrossRef] [Green Version]
- Wilson, A.M.; Barr, J.; Zagorski, M. The feasibility of counting songbirds using unmanned aerial vehicles. Auk 2017, 134, 350–362. [Google Scholar] [CrossRef]
- Paranjape, A.A.; Chung, S.J.; Kim, K.; Shim, D.H. Robotic Herding of a Flock of Birds Using an Unmanned Aerial Vehicle. IEEE Trans. Robot. 2018, 34, 901–915. [Google Scholar] [CrossRef] [Green Version]
- Tremblay, J.A.; Desrochers, A.; Aubry, Y.; Pace, P.; Bird, D.M. A Low-Cost Technique for Radio-Tracking Wildlife Using a Small Standard Unmanned Aerial Vehicle. J. Unmanned Veh. Syst. 2017, 5, 102–108. [Google Scholar] [CrossRef] [Green Version]
- Hong, S.J.; Han, Y.; Kim, S.Y.; Lee, A.Y.; Kim, G. Application of deep-learning methods to bird detection using unmanned aerial vehicle imagery. Sensors 2019, 19, 1651. [Google Scholar] [CrossRef] [Green Version]
- Primicerio, J.; Di Gennaro, S.F.; Fiorillo, E.; Genesio, L.; Lugato, E.; Matese, A.; Vaccari, F.P. A flexible unmanned aerial vehicle for precision agriculture. Precis. Agric. 2012, 13, 517–523. [Google Scholar] [CrossRef]
- Kelly, M.; Vehicle, U.A.; Algorithm, L. Object-based approach for crop Row Characterization in UAV Images for Site-Specific Weed Management. In Proceedings of the 4th GEOBIA, Rio de Janeiro, Brazil, 7–9 May 2012. [Google Scholar]
- Zhang, C.; Kovacs, J.M. The application of small unmanned aerial systems for precision agriculture: A review. Precis. Agric. 2012, 13, 693–712. [Google Scholar] [CrossRef]
- Huang, Y.B.; Thomson, S.J.; Hoffmann, W.C.; Lan, Y.; Fritz, B.K. Development and prospect of unmanned aerial vehicle technologies for agricultural production management. Int. J. Agric. Biol. Eng. 2013, 6, 1–10. [Google Scholar]
- Mogili, U.R.; Deepak, B.B.V.L. Review on Application of Drone Systems in Precision Agriculture. Procedia Comput. Sci. 2018, 133, 502–509. [Google Scholar] [CrossRef]
- Thiels, C.A.; Aho, J.M.; Zietlow, S.P.; Jenkins, D.H. Use of unmanned aerial vehicles for medical product transport. Air Med. J. 2015, 34, 104–108. [Google Scholar] [CrossRef]
- Laksham, K. Unmanned aerial vehicle (drones) in public health: A SWOT analysis. J. Fam. Med. Prim. Care 2019, 8, 342–346. [Google Scholar] [CrossRef] [PubMed]
- Haidari, L.A.; Brown, S.T.; Ferguson, M.; Bancroft, E.; Spiker, M.; Wilcox, A.; Ambikapathi, R.; Sampath, V.; Connor, D.L.; Lee, B.Y. The economic and operational value of using drones to transport vaccines. Vaccine 2016, 34, 4062–4067. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rosser, J.C., Jr.; Vignesh, V.; Terwilliger, B.A.; Parker, B.C. Surgical and Medical Applications of Drones: A Comprehensive Review. JSLS J. Soc. Laparoendosc. Surg. 2018, 22, e2018.00018. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Scherer, J.; Yahyanejad, S.; Hayat, S.; Yanmaz, E.; Vukadinovic, V.; Andre, T.; Bettstetter, C.; Rinner, B.; Khan, A.; Hellwagner, H. An autonomous multi-UAV system for search and rescue. In Proceedings of the DroNet 2015-Proceedings of the 2015 Workshop on Micro Aerial Vehicle Networks, Systems, and Applications for Civilian Use, Florence, Italy, 18–22 May 2015. [Google Scholar] [CrossRef]
- Silvagni, M.; Tonoli, A.; Zenerino, E.; Chiaberge, M. Multipurpose UAV for search and rescue operations in mountain avalanche events. Geomat. Nat. Hazards Risk 2017, 8, 18–33. [Google Scholar] [CrossRef] [Green Version]
- Ollero, A.; Martínez-de-Dios, J.R.; Merino, L. Unmanned aerial vehicles as tools for forest-fire fighting. For. Ecol. Manag. 2006, 234, S263. [Google Scholar] [CrossRef]
- Merino, L.; Caballero, F.; Martínez-De-Dios, J.R.; Maza, I.; Ollero, A. An unmanned aircraft system for automatic forest fire monitoring and measurement. J. Intell. Robot. Syst. Theory Appl. 2012, 65, 533–548. [Google Scholar] [CrossRef]
- Chamola, V.; Kotesh, P.; Agarwal, A.; Naren; Gupta, N.; Guizani, M. A Comprehensive Review of Unmanned Aerial Vehicle Attacks and Neutralization Techniques. Ad Hoc Netw. 2021, 111, 102324. [Google Scholar] [CrossRef]
- Draper, M.; Calhoun, G.; Ruff, H.; Williamson, D.; Barry, T. Manual versus speech input for unmanned aerial vehicle control station operations. In Proceedings of the Human Factors and Ergonomics Society Annual Meeting; SAGE Publications: Los Angeles, CA, USA, 2003; Volume 47, No. 1. pp. 109–113. [Google Scholar]
- Mięsikowska, M. Speech Intelligibility in the presence of X4 Unmanned Aerial Vehicle. 2018 Signal Process. Algorithms Archit. Arrange. Appl. 2018, 310–314. [Google Scholar] [CrossRef]
- Park, J.-S.; Na, H.-J. Front-End of Vehicle-Embedded Speech Recognition for Voice-Driven Multi-UAVs Control. Appl. Sci. 2020, 10, 6876. [Google Scholar] [CrossRef]
- Bold, S.; Sosorbaram, B.; Batsukh, B.-E.; Ro Lee, S. Autonomous Vision Based Facial and voice Recognition on the Unmanned Aerial Vehicle. Int. J. Recent Innov. Trends Comput. Commun. 2016, 4, 243–249. [Google Scholar]
- Anand, S.S.; Mathiyazaghan, R. Design and Fabrication of Voice Controlled Unmanned Aerial Vehicle. J. Aeronaut. Aerosp. Eng. 2016, 5, 1–5. [Google Scholar] [CrossRef]
- Prodeus, A.M. Performance measures of noise reduction algorithms in voice control channels of UAVs. In Proceedings of the 2015 IEEE International Conference Actual Problems of Unmanned Aerial Vehicles Developments (APUAVD), Kiev, Ukraine, 13–15 October 2015; pp. 189–192. [Google Scholar]
- Revathi, A.; Jeyalakshmi, C. Robust speech recognition in noisy environment using perceptual features and adaptive filters. In Proceedings of the 2017 2nd International Conference on Communication and Electronics Systems (ICCES), Coimbatore, India, 19–20 October 2017; pp. 692–696. [Google Scholar]
- Ondas, S.; Juhar, J.; Pleva, M.; Cizmar, A.; Holcer, R. Service Robot SCORPIO with Robust Speech Interface. Int. J. Adv. Robot. Syst. 2013, 10, 1–11. [Google Scholar] [CrossRef]
- Zha, Z.L.; Hu, J.; Zhan, Q.R.; Shan, Y.H.; Xie, X.; Wang, J.; Cheng, H.B. Robust speech recognition combining cepstral and articulatory features. In Proceedings of the 2017 3rd IEEE International Conference on Computer and Communications (ICCC), Chengdu, China, 13–16 December 2017; pp. 1401–1405. [Google Scholar]
- International Standard ISO 9921:2003. Ergonomics—Assessment of Speech Communication. Publication Date: 2003-10. Available online: https://www.iso.org/standard/33589.html (accessed on 7 January 2021).
- Discriminant Function Analysis—STATISTICA Electronic Documentation. Available online: https://statisticasoftware.wordpress.com/2012/06/25/discriminant-function-analysis/ (accessed on 7 January 2021).






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| UAV | LAeq (dB(A)) | LS,A,L (dB) | LSIL (dB) | SIL (dB) | Rating |
|---|---|---|---|---|---|
| present | 70.5 | 65.98 | 58.98 | 7.0 | Poor |
| absent | 28.4 | 47.98 | 12.58 | 35.4 | Excellent |
| Roots Removed | Canonical R | Wilks’-Lambda | Chi-Square | p-Value |
|---|---|---|---|---|
| 0 | 0.853 | 0.0384 | 746.18 | 0.00000 |
| 1 | 0.807 | 0.1415 | 447.78 | 0.00000 |
| 2 | 0.621 | 0.4051 | 206.95 | 0.00000 |
| 3 | 0.471 | 0.6593 | 95.40 | 0.00000 |
| 4 | 0.343 | 0.8475 | 37.89 | 0.03560 |
| 5 | 0.171 | 0.9606 | 9.21 | 0.81733 |
| 6 | 0.102 | 0.9895 | 2.41 | 0.87868 |
| ci | K(backward) | K(down) | K(forward) | K(Left) | K(Right) | K(Stop) | K(Start) | K(up) |
|---|---|---|---|---|---|---|---|---|
| wi1 | 55.38 | 61.70 | 52.70 | 58.95 | 59.33 | 52.06 | 45.64 | 57.19 |
| wi2 | −137.52 | −142.67 | −137.90 | −141.10 | −138.87 | −134.25 | −135.41 | −150.02 |
| wi3 | 333.32 | 345.43 | 340.89 | 332.51 | 331.93 | 326.86 | 335.78 | 349.35 |
| wi4 | −490.28 | −492.94 | −491.04 | −484.72 | −493.49 | −491.92 | −487.04 | −492.81 |
| wi5 | 484.16 | 474.44 | 469.49 | 491.43 | 491.14 | 479.79 | 466.35 | 459.08 |
| wi6 | −360.13 | −340.22 | −353.48 | −359.10 | −356.12 | −356.51 | −364.24 | −328.74 |
| wi7 | 167.30 | 158.24 | 156.79 | 162.39 | 169.22 | 170.53 | 162.14 | 151.11 |
| wi8 | −208.60 | −200.27 | −214.34 | −199.45 | −203.70 | −203.29 | −210.45 | −201.63 |
| wi9 | 262.83 | 282.21 | 276.07 | 262.80 | 264.91 | 260.24 | 275.35 | 292.98 |
| wi10 | −338.17 | −340.70 | −338.38 | −352.07 | −342.34 | −330.30 | −328.55 | −343.81 |
| wi11 | 438.68 | 445.97 | 427.19 | 452.92 | 440.11 | 422.68 | 427.06 | 445.52 |
| wi12 | −415.15 | −435.94 | −426.25 | −409.54 | −414.44 | −408.60 | −420.28 | −446.80 |
| cio | −1348.46 | −1376.38 | −1365.74 | −1343.55 | −1357.98 | −1328.74 | −1336.58 | −1392.33 |
| Group | % | K(backward) | K(down) | K(forward) | K(Left) | K(Right) | K(Start) | K(Stop) | K(up) |
|---|---|---|---|---|---|---|---|---|---|
| backward | 43.3 | 13 | 0 | 4 | 4 | 4 | 3 | 2 | 0 |
| down | 83.3 | 0 | 25 | 2 | 0 | 2 | 0 | 0 | 1 |
| forward | 70 | 5 | 0 | 21 | 0 | 0 | 1 | 3 | 0 |
| left | 70 | 4 | 0 | 0 | 21 | 5 | 0 | 0 | 0 |
| right | 73.3 | 3 | 0 | 1 | 1 | 22 | 3 | 0 | 0 |
| start | 93.3 | 1 | 0 | 0 | 0 | 0 | 28 | 1 | 0 |
| stop | 80 | 3 | 0 | 1 | 0 | 0 | 2 | 24 | 0 |
| up | 96.6 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 29 |
| Total | 76.2 | 29 | 25 | 29 | 26 | 34 | 37 | 30 | 30 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mięsikowska, M. Discriminant Analysis of Voice Commands in the Presence of an Unmanned Aerial Vehicle. Information 2021, 12, 23. https://doi.org/10.3390/info12010023
Mięsikowska M. Discriminant Analysis of Voice Commands in the Presence of an Unmanned Aerial Vehicle. Information. 2021; 12(1):23. https://doi.org/10.3390/info12010023
Chicago/Turabian StyleMięsikowska, Marzena. 2021. "Discriminant Analysis of Voice Commands in the Presence of an Unmanned Aerial Vehicle" Information 12, no. 1: 23. https://doi.org/10.3390/info12010023
APA StyleMięsikowska, M. (2021). Discriminant Analysis of Voice Commands in the Presence of an Unmanned Aerial Vehicle. Information, 12(1), 23. https://doi.org/10.3390/info12010023