
Mixed Scheduling Model for Limited-Stop and Normal Bus Service with Fleet Size Constraint



Abstract
:1. Introduction
2. Methods
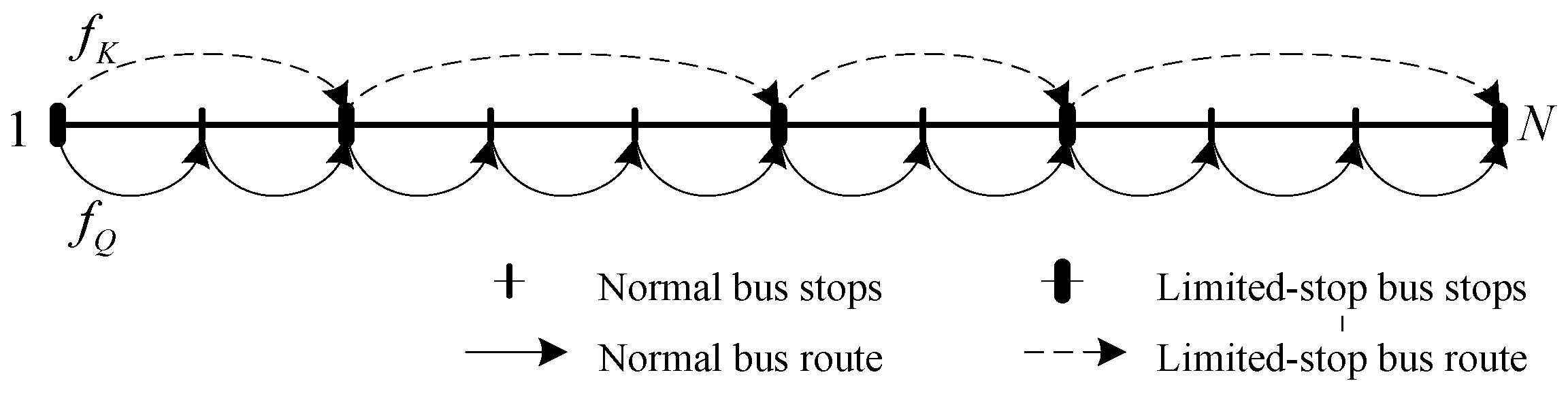
2.1. Notation and Assumptions
2.2. Total Costs of a Bus Route
2.2.1. Access Time Cost
2.2.2. Waiting Time Cost
2.2.3. In-Vehicle Travel Time Cost
2.2.4. Operation Cost
2.3. Objective Function
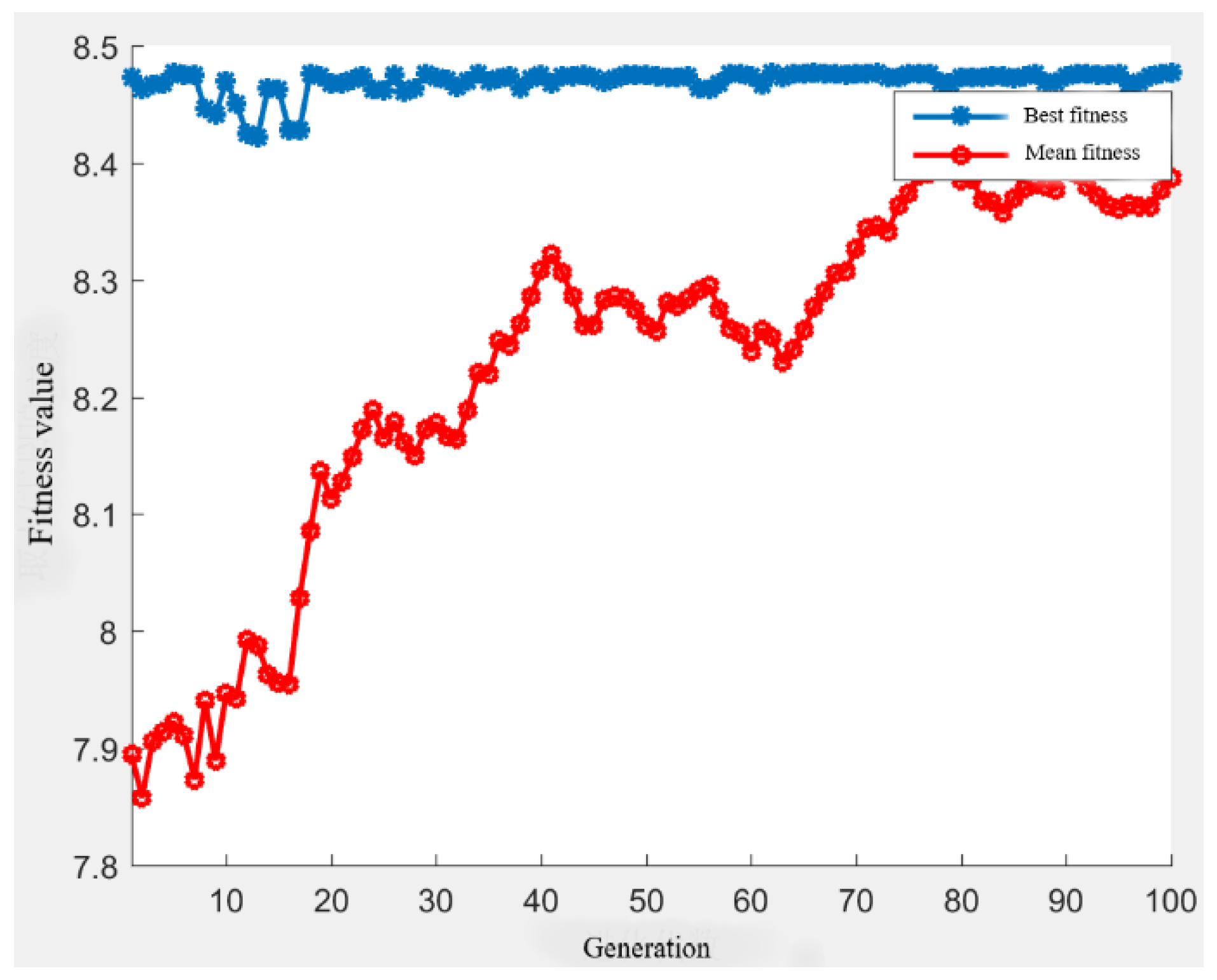
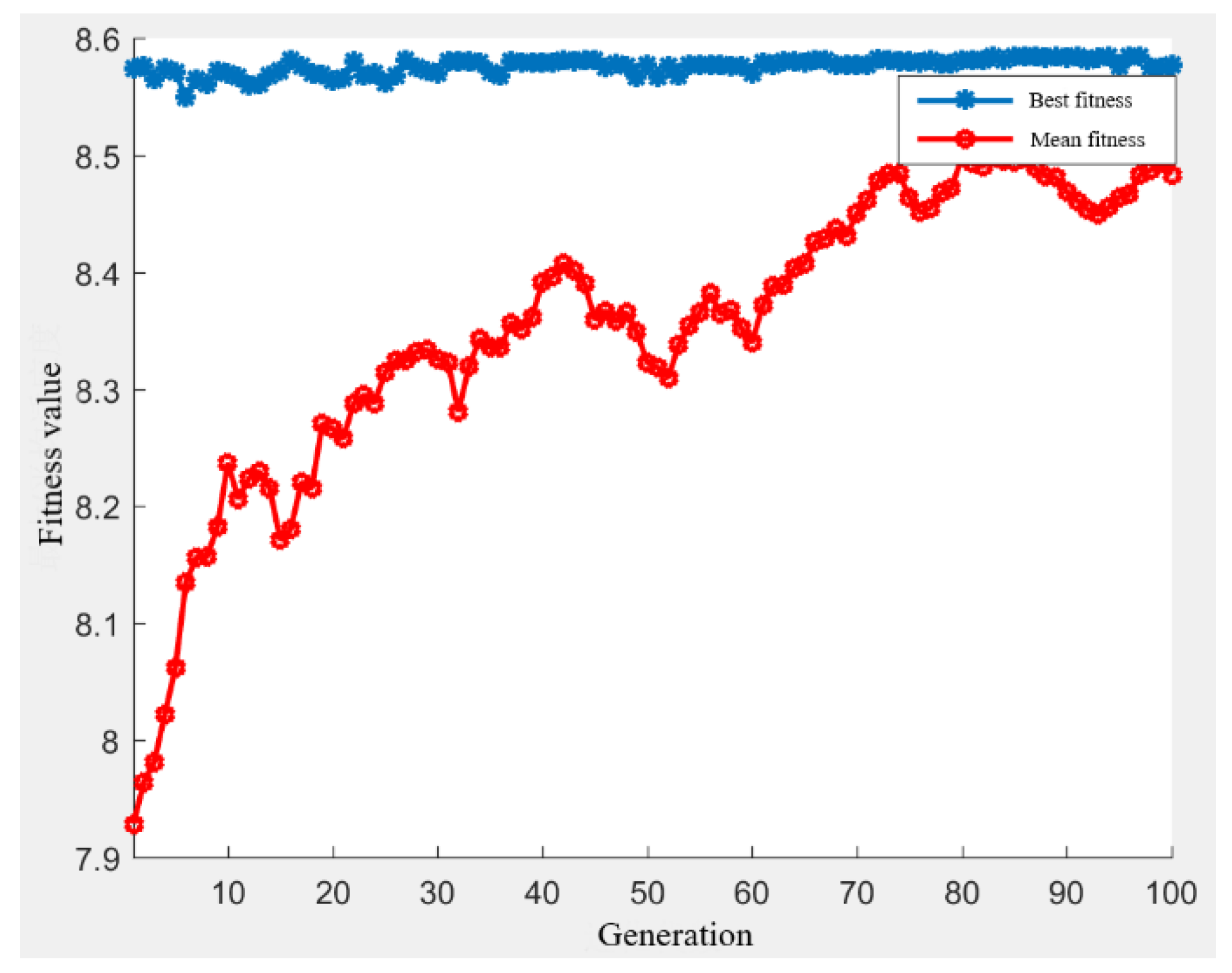
2.4. Solution Algorithm
2.5. Data and Parameter Setting
3. Results and Discussion
3.1. Results
3.2. Discussion
3.2.1. Sensitivity Analysis of Different Load Factors
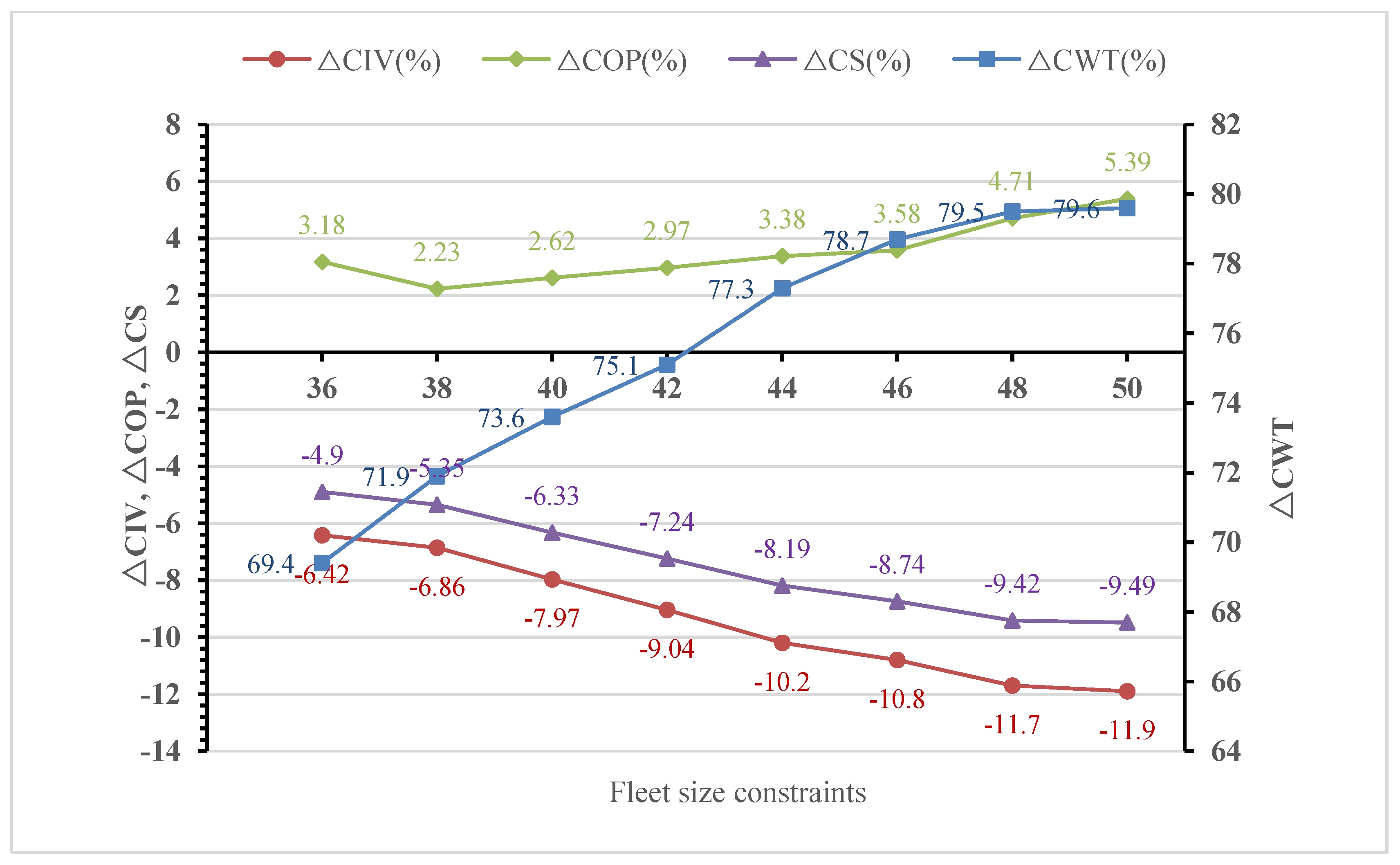
3.2.2. Sensitivity Analysis of Different Fleet Sizes
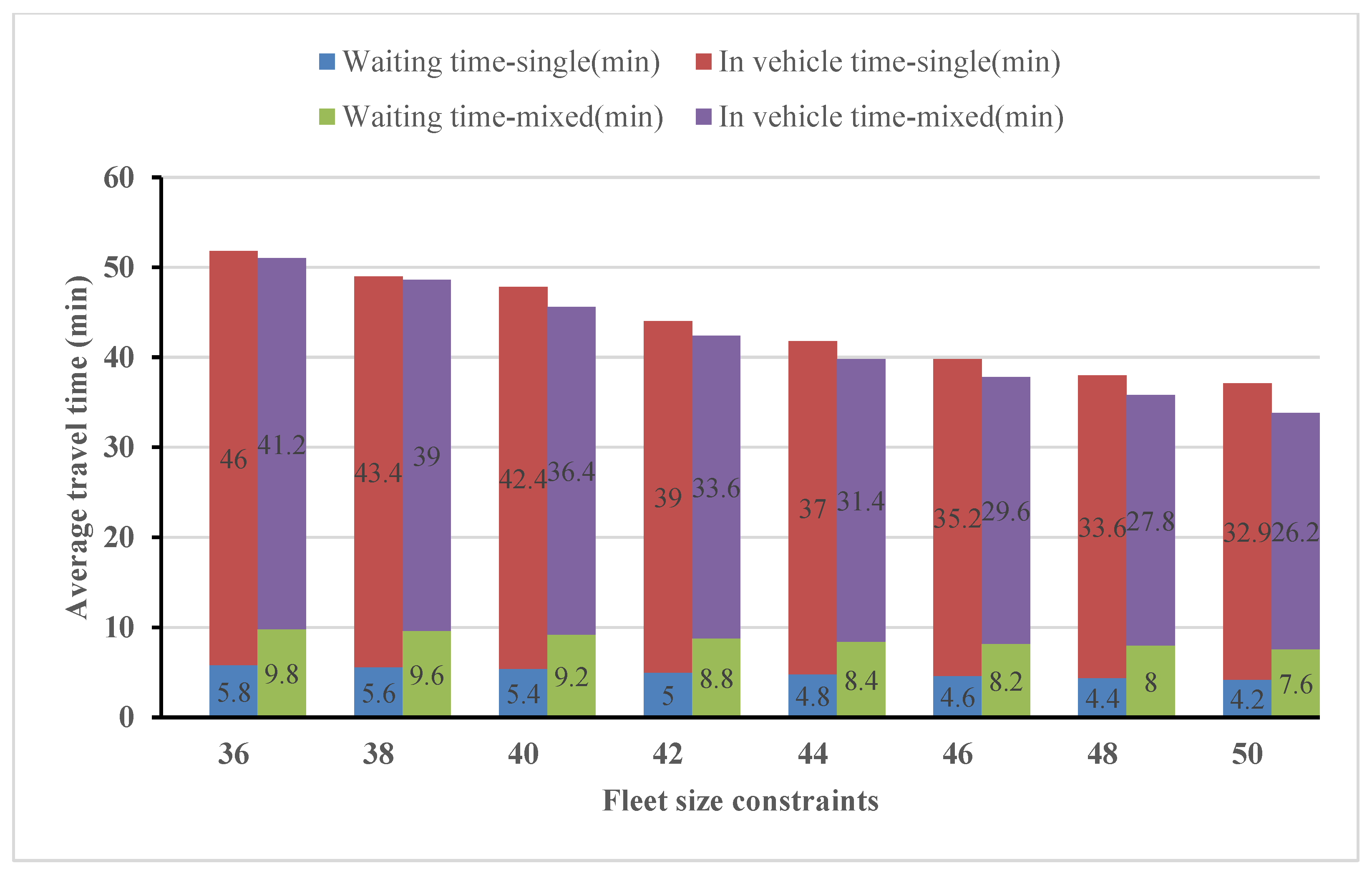
3.2.3. Analysis of the Travel Time Saving
4. Conclusions
- (1)
- The cycle time of limited-stop service achieved a savings of 5.76% compared to that of single scheduling: a normal-service visiting every stop on a line at its optimal frequency.
- (2)
- When the load factor constraint is activated, these services tend to be replaced with higher frequencies on limited-stop services, and the total cost of the mixed scheduling service decreases with the increasing load factor.
- (3)
- Under the same load factor constraint, the total cost is lower when the system is operated under the mixed scheduling service compared to that under the single scheduling service.
- (4)
- Under the same fleet size constraint, the passenger travel time and operation cost obtained by offering the limited-stop services are significant savings, especially when the fleet size increases.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Liang, M.; Zhang, H.M.; Ma, R.; Wang, W.; Dong, C. Cooperatively coevolutionary optimization design of limited-stop services and operating frequencies for transit networks. Transp. Res. Part C Emerg. Technol. 2021, 125, 103038. [Google Scholar] [CrossRef]
- Suman, H.; Larrain, H.; Muñoz, J.C. The impact of using a naïve approach in the limited-stop bus service design problem. Transp. Res. Part A Policy Pract. 2021, 149, 45–61. [Google Scholar] [CrossRef]
- Tang, C.Y.; Ceder, A.; Zhao, S.C. Minimizing User and Operator Costs of Single Line Bus Service Using Operational Strategies. Transport 2018, 33, 993–1004. [Google Scholar] [CrossRef] [Green Version]
- Zhang, H.; Zhao, S.Z.; Cao, Y.; Liu, H.S.; Liang, S.D. Real-Time Integrated Limited-Stop and Short-Turning Bus Control with Stochastic Travel Time. J. Adv. Transp. 2017, 2017, 2960728. [Google Scholar] [CrossRef] [Green Version]
- Tang, C.Y.; Ceder, A.; Zhao, S.C.; Ge, Y.E. Determining Optimal Strategies for Single-Line Bus Operation by Means of Smartphone Demand Data. Transp. Res. Rec. 2006, 2539, 130–139. [Google Scholar] [CrossRef]
- Clarens, G.C.; Hurdle, V.F. An operating strategy for a commuter bus system. Transp. Sci. 1975, 9, 1–20. [Google Scholar] [CrossRef]
- Abkowitz, M.; Engelstein, I. Methods for maintaining transit service regularity. Transp. Res. Rec. 1984, 1961, 1–8. [Google Scholar]
- Furth, P.G.; Day, B. Transit routing and scheduling strategies for heavy demand corridors. Transp. Res. Rec. 1985, 1011, 23–26. [Google Scholar]
- Vijayaraghavan, T.A.S. Fleet Assignment strategies in urban transportation using express and partial services. Transp. Res. Part A 1995, 29, 157–171. [Google Scholar] [CrossRef]
- Vuchic, V.R. Urban. Transit. Operations, Planning and Economics; John Wiley and Sons: Indianapolis, IN, USA, 2005. [Google Scholar]
- El-Geneidy, A.M.; Surprenant-Legault, J. Limited-stop bus service: An evaluation of an implementation strategy. Public Transp. 2010, 2, 291–306. [Google Scholar] [CrossRef]
- Stacey, S.; Sarah, W. Intermediate time point removal on limited-stop routes at New York city transit. In Proceedings of the 92th Annual Meeting of the Transportation Research Board, Washington, DC, USA, 13–17 January 2013. [Google Scholar]
- Ceder, A. Designing public transport network and routes. In Advanced Modeling for Transit Operations and Service Planning; Emerald Group Publishing Limited: Bradford, UK, 2003; pp. 59–92. [Google Scholar]
- Barnhart, C.; Laporte, G. Handbooks in Operations Research and Management Science: Transportation; Elsevier: Amsterdam, The netherlands, 2006. [Google Scholar]
- Guihaire, V.; Hao, J.K. Transit network design and scheduling: A global review. Transp. Res. Part A Policy Pract. 2008, 42, 1251–1273. [Google Scholar] [CrossRef] [Green Version]
- Leiva, C.; Muñoz, J.C.; Giesen, R.; Larrain, H. Design of limited-stop services for an urban bus corridor with capacity constraints. Transp. Res. Part B Methodol. 2010, 44, 1186–1201. [Google Scholar] [CrossRef]
- Tetreault, P.R.; El-Geneidy, A.M. Estimating bus run times for new limited-stop service using archived AVL and APC data. Transp. Res. Part A Policy Pract. 2010, 44, 390–402. [Google Scholar] [CrossRef]
- Niu, H. Determination of the skip-stop scheduling for a congested transit line by bilevel genetic algorithm. Int. J. Comput. Intell. Syst. 2011, 4, 1158–1167. [Google Scholar]
- Liu, Z.Y.; Yan, Y.D.; Qu, X.; Zhang, Y. Bus stop-skipping scheme with random travel time. Transp. Res. Part C Emerg. Technol. 2013, 35, 46–56. [Google Scholar] [CrossRef]
- Chen, J.X.; Liu, Z.Y.; Zhu, S.L.; Wang, W. Design of limited-stop bus service with capacity constraint and stochastic travel time. Transp. Res. Part E Logist. Transp. Rev. 2015, 83, 1–15. [Google Scholar] [CrossRef]
- Maxime, F.; Giesen, R.; Muñoz, J.C. Continuous approximation for skip-stop operation in rail transit. Transp. Res. Part C Emerg. Technol. 2013, 36, 419–433. [Google Scholar]
- Yi, Y.; Choi, K.; Lee, Y.J. Optimal Limited-stop Bus Routes Selection Using a Genetic Algorithm and Smart Card Data. J. Public Transp. 2016, 19, 178–198. [Google Scholar] [CrossRef] [Green Version]
- Zhang, H.; Zhao, S.Z.; Liu, H.S.; Liang, S.D. Design of limited-stop service based on the degree of unbalance of passenger demand. PLoS ONE 2018, 13, e0193855. [Google Scholar] [CrossRef] [Green Version]
- Torabi, M.; Salari, M. Limited-stop bus service: A strategy to reduce the unused capacity of a transit network. Swarm Evol. Comput. 2019, 44, 972–986. [Google Scholar] [CrossRef]
- Alam, A.; Diab, E.; El-Geneidy, A.M.; Hatzopoulou, M. A simulation of transit bus emissions along an urban corridor: Evaluating changes under various service improvement strategies. Transp. Res. Part D Transp. Environ. 2014, 31, 189–198. [Google Scholar] [CrossRef]
- Hart, N. Methodology for Evaluating Potential for Limited-Stop Bus Service along Existing Local Bus Corridors. Transp. Res. Rec. 2016, 2543, 91–100. [Google Scholar] [CrossRef]
- Soto, G.; Larrain, H.; Munoz, J.C. A new solution framework for the limited-stop bus service design problem. Transp. Res. Part B Methodol. 2017, 105, 67–85. [Google Scholar] [CrossRef]
- Zhang, H.; Liu, H.S.; Zhao, S.Z.; Liang, S.D. Optimising the design of a limited-stop bus service for a branching network. Proc. Inst. Civ. Eng. Munic. Eng. 2017, 170, 230–238. [Google Scholar] [CrossRef] [Green Version]
- Wang, D.Z.W.; Nayan, A.; Szeto, W.Y. Optimal bus service design with limited stop services in a travel corridor. Transp. Res. Part E Logist. Transp. Rev. 2018, 111, 70–86. [Google Scholar] [CrossRef]
- Zhao, H.; Zhang, C. An online-learning-based evolutionary many-objective algorithm. Inf. Sci. 2020, 509, 1–21. [Google Scholar] [CrossRef]
- Dulebenets, M.A. A Delayed Start Parallel Evolutionary Algorithm for just-in-time truck scheduling at a cross-docking facility. Int. J. Prod. Econ. 2019, 212, 236–258. [Google Scholar] [CrossRef]
- Liu, Z.Z.; Wang, Y.; Huang, P.Q. A many-objective evolutionary algorithm with angle-based selection and shift-based density estimation. Inf. Sci. 2020, 509, 400–419. [Google Scholar] [CrossRef] [Green Version]
- Pasha, J.; Dulebenets, M.A.; Kavoosi, M.; Abioye, O.F.; Wang, H.; Guo, W. An Optimization Model and Solution Algorithms for the Vehicle Routing Problem with a “Factory-in-a-Box”. IEEE Access 2020, 8, 134743–134763. [Google Scholar] [CrossRef]
- D’Angelo, G.; Pilla, R.; Tascini, C.; Rampone, S. A proposal for distinguishing between bacterial and viral meningitis using genetic programming and decision trees. Soft Comput. 2019, 23, 11775–11791. [Google Scholar] [CrossRef]
- Agrawal, J.; Mathew, T.V. Transit Route Network Design Using Parallel Genetic Algorithm. J. Comput. Civ. Eng. 2004, 18, 248–256. [Google Scholar] [CrossRef]
- Fan, W.; Machemehl, R.B. Optimal transit route network design problem with variable transit demand: Genetic algorithm approach. J. Transp. Eng. 2006, 132, 40–51. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| O-D | Passenger Demand | O-D | Passenger Demand | O-D | Passenger Demand | O-D | Passenger Demand |
|---|---|---|---|---|---|---|---|
| 1–7 | 20 | 1–8 | 20 | 1–10 | 20 | 1–11 | 20 |
| 1–15 | 20 | 1–23 | 22 | 1–26 | 12 | 1–31 | 20 |
| 1–32 | 8 | 2–11 | 20 | 2–15 | 20 | 2–31 | 16 |
| 2–32 | 24 | 3–32 | 16 | 4–11 | 20 | 4–15 | 20 |
| 4–26 | 20 | 4–31 | 24 | 5–30 | 20 | 5–32 | 20 |
| 6–31 | 20 | 7–31 | 24 | 7–32 | 16 | 8–23 | 16 |
| 8–26 | 24 | 8–29 | 28 | 8–31 | 12 | 8–32 | 24 |
| 9–19 | 24 | 9–23 | 36 | 9–26 | 24 | 9–29 | 20 |
| 9–31 | 20 | 10–23 | 24 | 10–30 | 16 | 10–32 | 20 |
| 11–30 | 20 | 11–32 | 20 | 12–31 | 20 | 12–32 | 20 |
| 13–31 | 20 | 14–32 | 20 | 15–20 | 16 | 15–22 | 20 |
| 15–23 | 48 | 15–24 | 24 | 15–32 | 92 | 15–32 | 28 |
| 16–23 | 12 | 16–28 | 20 | 16–31 | 28 | 16–32 | 12 |
| 17–32 | 20 | 18–30 | 20 | 18–32 | 20 | 19–27 | 16 |
| 19–31 | 44 | 19–32 | 20 | 20–28 | 12 | 20–31 | 16 |
| 20–32 | 24 | 21–32 | 20 | 23–32 | 20 | 24–32 | 24 |
| 25–32 | 52 |
| αmin~αmax (%) | Schedule Type | α (%) | f (buses/h) | F (buses) | Cycle Time (min) | Wait Time Cost ($) | In-Vehicle Time Cost ($) | Operation Cost ($) | Total Cost ($) | △CS (%) | ||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| I | II | I | II | I | II | I | II | |||||||
| 50~90 | Single | 61.6 | 13.3 | 50 | 197 | 1742 | 178,272 | 17,670 | 197,686 | −3.1 | ||||
| Mixed | 90 | 50 | 8.8 | 2 | 30 | 6 | 199 | 174 | 3740 | 173,502 | 14,246 | 191,488 | ||
| 50~100 | Single | 61.6 | 13.3 | 50 | 197 | 1742 | 178,272 | 17,670 | 197,686 | −4.4 | ||||
| Mixed | 100 | 50 | 8.2 | 2.6 | 28 | 8 | 199 | 174 | 3804 | 171,064 | 14,200 | 189,068 | ||
| 50~120 | Single | 61.6 | 13.3 | 50 | 197 | 1742 | 178,272 | 17670 | 197,686 | −7.1 | ||||
| Mixed | 120 | 50 | 6.8 | 4 | 24 | 12 | 199 | 174 | 3992 | 165,656 | 14,094 | 185,176 | ||
| Fg (buses) | Type of Schedule | f (buses/h) | A (%) | F (buses) | Cycle Time (min) | ||||
|---|---|---|---|---|---|---|---|---|---|
| I | II | I | II | I | II | I | II | ||
| 36 | Single | 10.3 | 80 | 36 | 198 | ||||
| Mixed | 8.2 | 2.6 | 100 | 50 | 28 | 8 | 199 | 174 | |
| 38 | Single | 10.9 | 75.2 | 38 | 198 | ||||
| Mixed | 8.31 | 2.97 | 98 | 48 | 30 | 8 | 198 | 173 | |
| 40 | Single | 11.1 | 71 | 40 | 198 | ||||
| Mixed | 8.3 | 3.6 | 98 | 45 | 30 | 10 | 198 | 173 | |
| 42 | Single | 12 | 62 | 42 | 197 | ||||
| Mixed | 8.27 | 4.35 | 99 | 43 | 30 | 12 | 198 | 173 | |
| 44 | Single | 12.6 | 65 | 44 | 197 | ||||
| Mixed | 8.16 | 5.14 | 100 | 40 | 28 | 16 | 198 | 173 | |
| 46 | Single | 13.1 | 62 | 46 | 197 | ||||
| Mixed | 8.22 | 5.74 | 99 | 39 | 28 | 18 | 198 | 173 | |
| 48 | Single | 13.7 | 60 | 48 | 197 | ||||
| Mixed | 8.16 | 6.48 | 100 | 37 | 28 | 20 | 198 | 173 | |
| 50 | Single | 14.1 | 62 | 50 | 197 | ||||
| Mixed | 8.2 | 7.2 | 100 | 35 | 28 | 22 | 198 | 172 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, X.; Ma, J. Mixed Scheduling Model for Limited-Stop and Normal Bus Service with Fleet Size Constraint. Information 2021, 12, 400. https://doi.org/10.3390/info12100400
Jiang X, Ma J. Mixed Scheduling Model for Limited-Stop and Normal Bus Service with Fleet Size Constraint. Information. 2021; 12(10):400. https://doi.org/10.3390/info12100400
Chicago/Turabian StyleJiang, Xiaohong, and Jianxiao Ma. 2021. "Mixed Scheduling Model for Limited-Stop and Normal Bus Service with Fleet Size Constraint" Information 12, no. 10: 400. https://doi.org/10.3390/info12100400
APA StyleJiang, X., & Ma, J. (2021). Mixed Scheduling Model for Limited-Stop and Normal Bus Service with Fleet Size Constraint. Information, 12(10), 400. https://doi.org/10.3390/info12100400