
Relativistic Effects on Satellite–Ground Two–Way Precise Time Synchronization

 ,
, 

Abstract
:1. Introduction
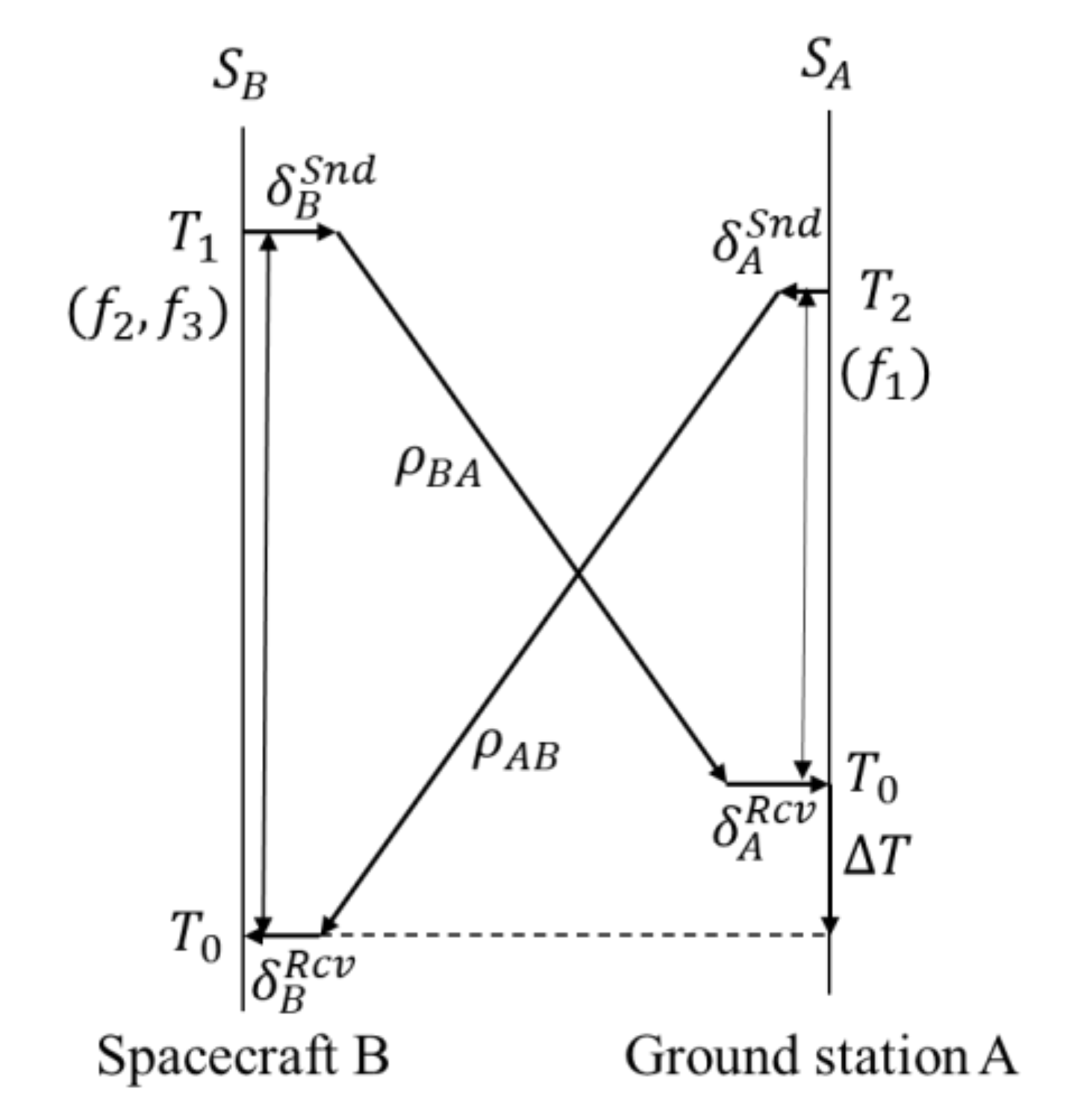
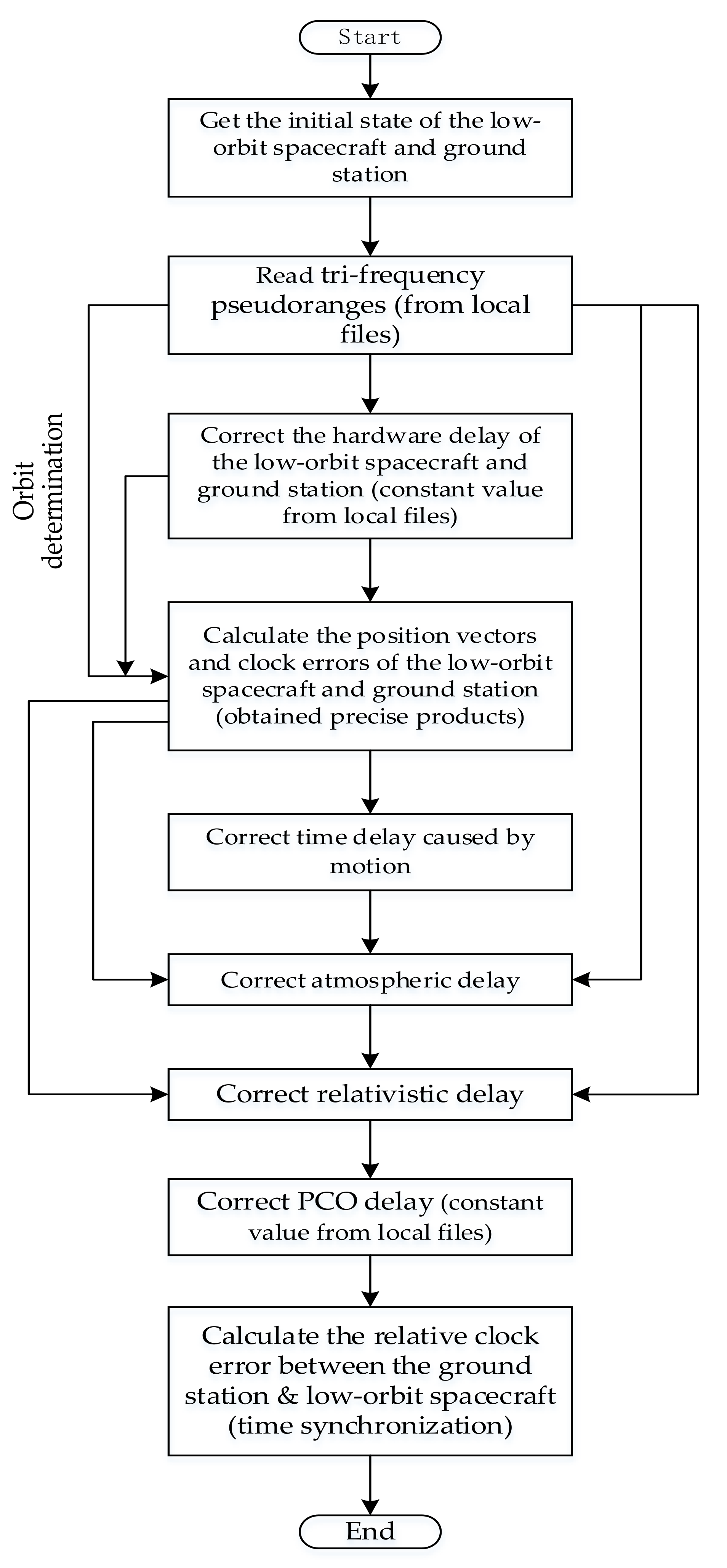
2. Two-Way Time Synchronization Method with GSLs
3. Relativistic Effects and Corrections
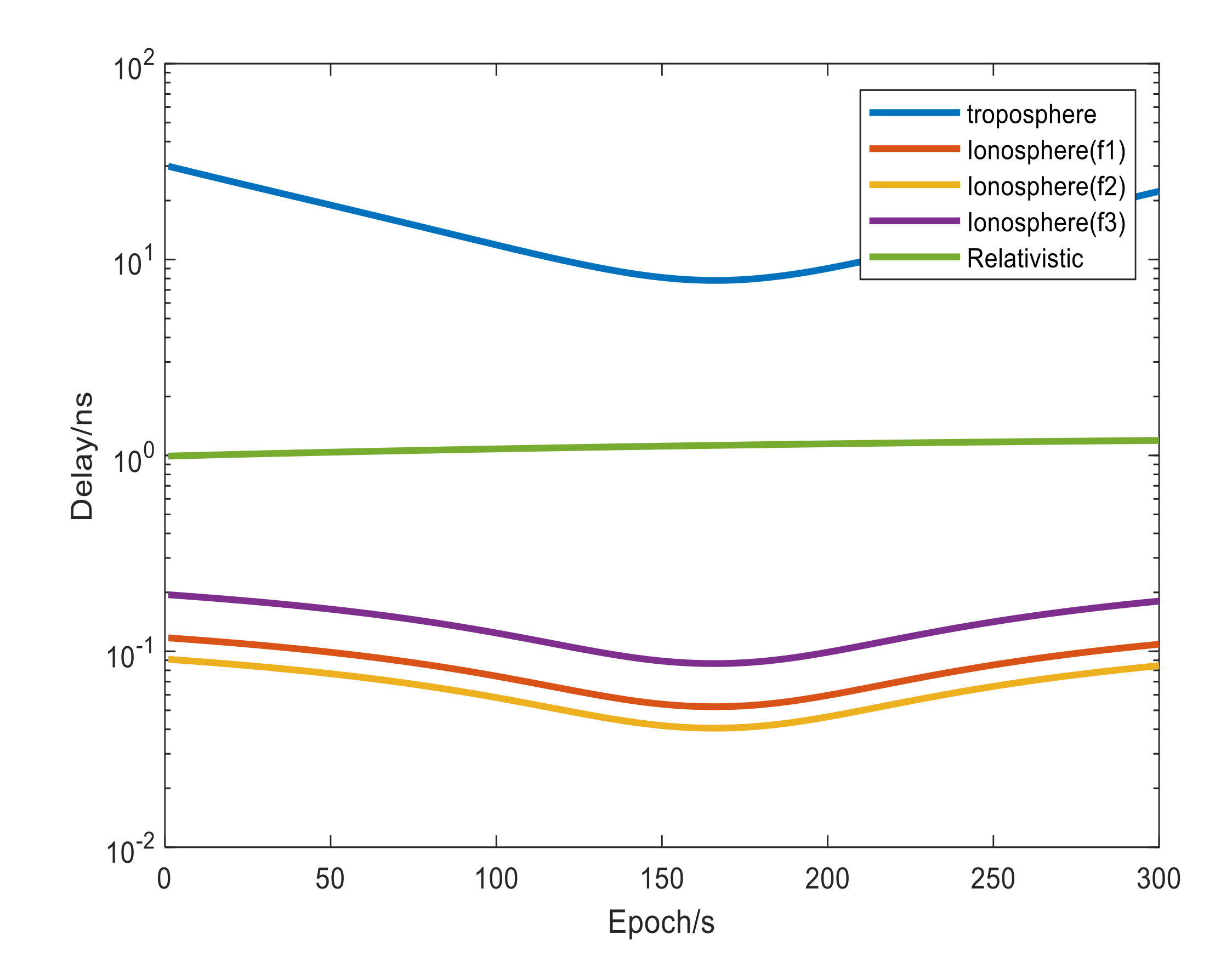
- Relativistic effect on frequency (nominal frequency offset and periodic relativity delay)
- Relativistic path range effect (gravitational time delay)
3.1. Relativistic Effect on Frequency
3.2. Relativistic Path Range Effect
4. Simulation and Discussion
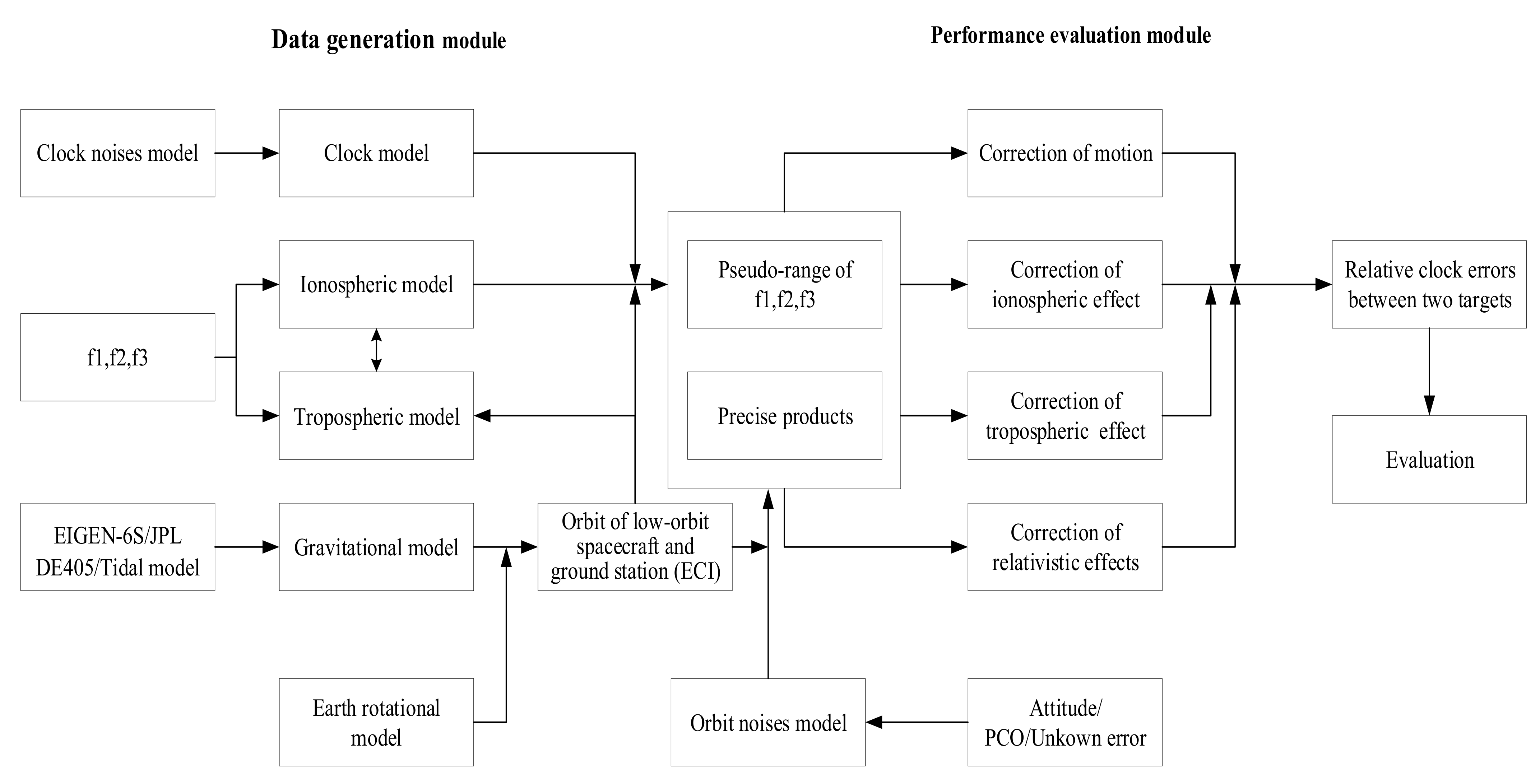
4.1. Data Generation
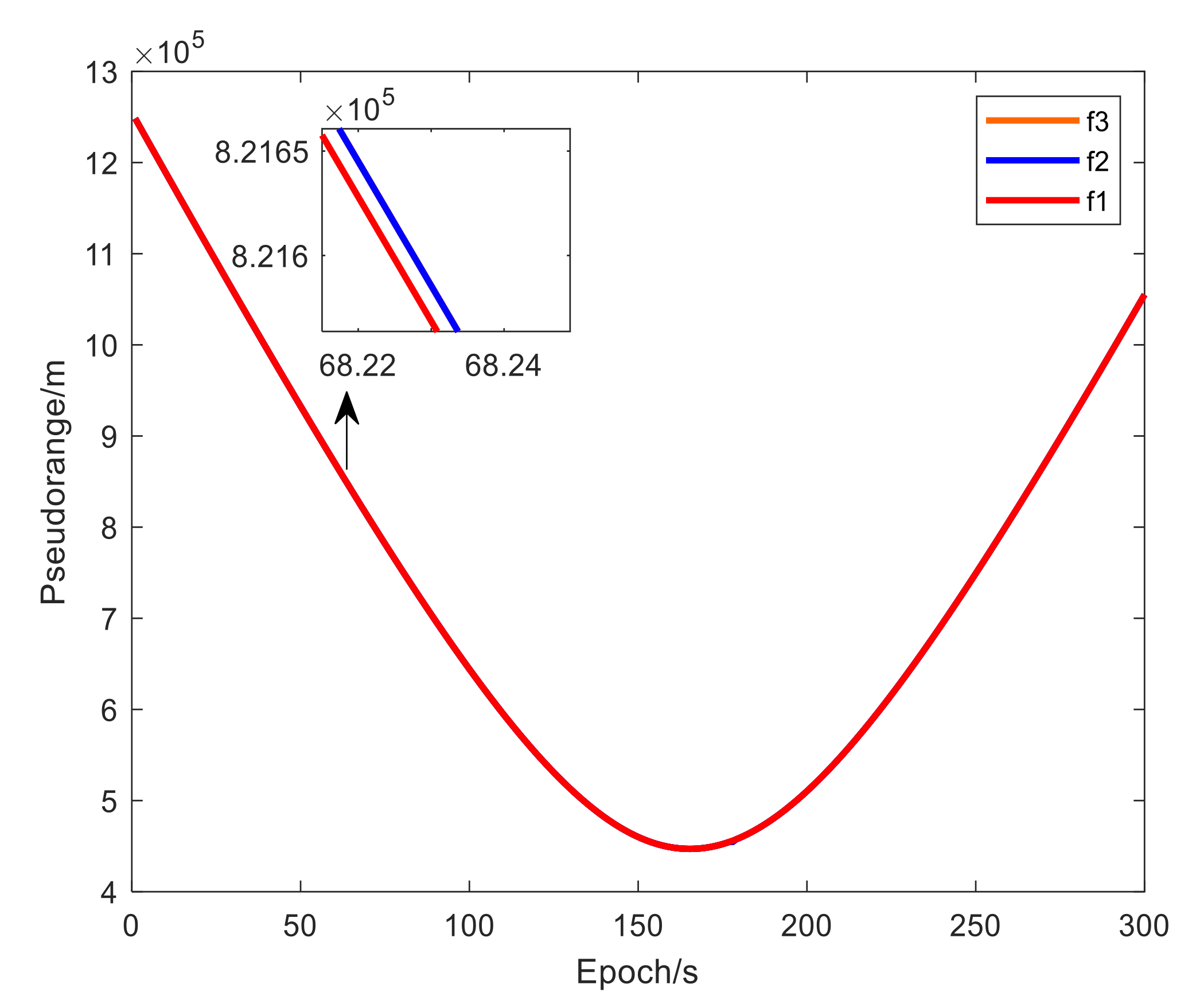
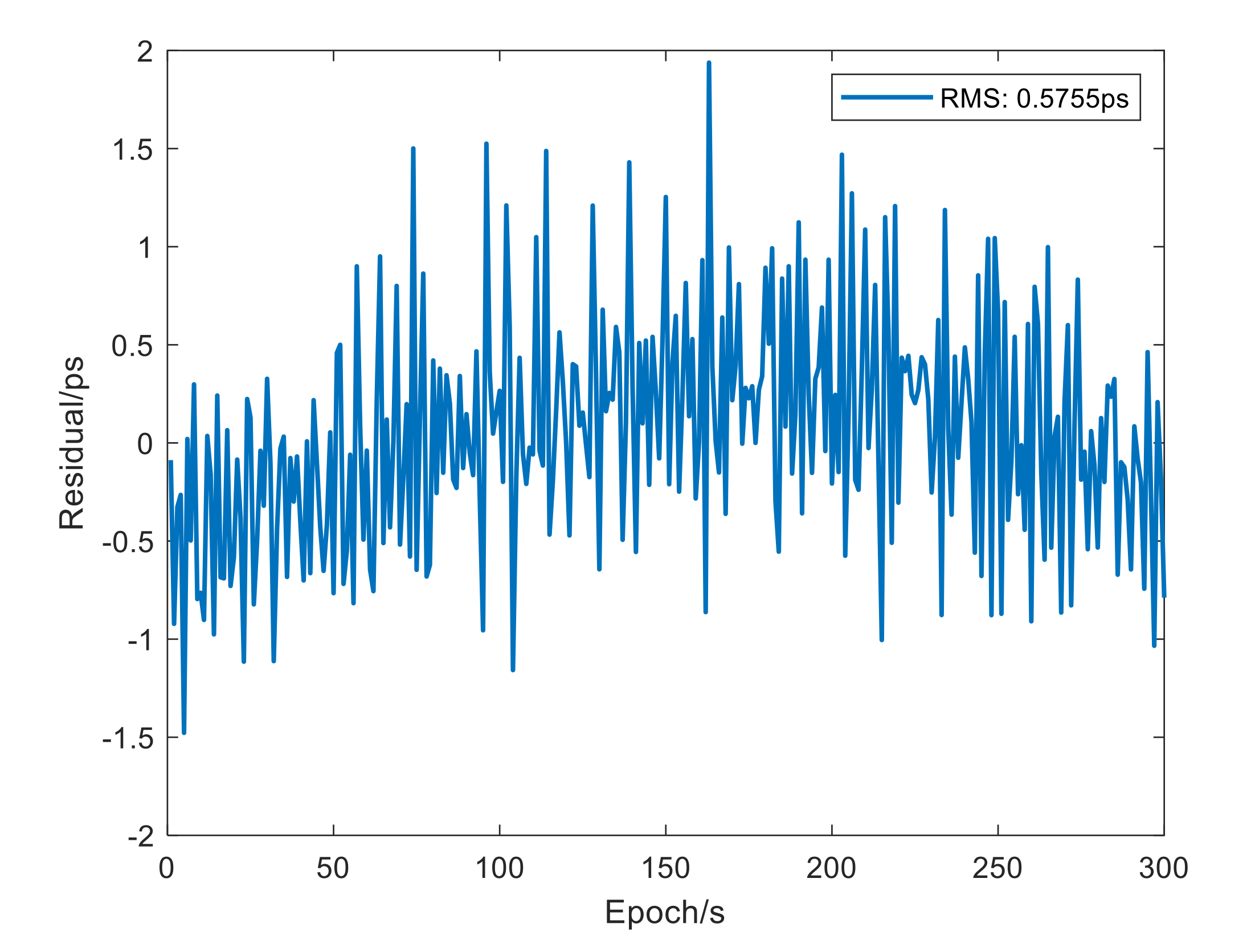
4.2. Validating the Methods with Simulated Data
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| Abbreviation | Definition |
| POD | precise orbit determination |
| PNT | Positioning, navigation and timing |
| GNSS | Global navigation satellite system |
| BDS-3 | BeiDou-3 navigation system |
| ESA | European Space Agency |
| ISS | International Space Station |
| MWL | Microwave link |
| CSS | Chinese Space Station |
| GSLs | Satellite-ground links |
| ISLs | Inter-satellite links |
| LEO | Low-orbit earth orbit |
| TDMA | Time division multiple access |
| TWSTFT | Two-way Satellite Time and Frequency Transfer |
| ECI | Earth-centered inertial |
| NFO | Nominal frequency offset |
| EOPs | Earth orientation parameters |
| IERS | International Earth Rotation Service |
| STEC | Slant total electron content |
| PCO | Phase center offset |
| RMS | Root mean square |
References
- Mehlstäubler, T.E.; Grosche, G.; Lisdat, C.; Schmidt, P.O.; Denker, H. Atomic clocks for geodesy. Rep. Prog. Phys. 2018, 81, 064401. [Google Scholar] [CrossRef] [Green Version]
- Pan, J.; Hu, X.; Zhou, S.; Tang, C.; Guo, R.; Zhu, L.; Tang, G.; Hu, G. Time synchronization of new-generation BDS satellites using inter-satellite link measurements. Adv. Space Res. 2018, 61, 145–153. [Google Scholar] [CrossRef]
- Tang, G.; Yang, W.; Su, R.; Xia, A. Time Synchronization Method base on Combined Satellite-Ground and Inter-satellite Observation. Wuhan Daxue Xuebao Geomat. Inf. Sci. Wuhan Univ. 2018, 43, 183–187. [Google Scholar]
- Delva, P.; Meynadier, F.; Le Poncin-Lafitte, C.; Laurent, P.; Wolf, P. Time and frequency transfer with a MicroWave Link in the ACES/PHARAO mission. In Proceedings of the 2012 European Frequency and Time Forum, Gothenburg, Sweden, 23–27 April 2012; pp. 28–35. [Google Scholar]
- Meynadier, F.; Delva, P.; Le Poncin Lafitte, C.; Guerlin, C.; Laurent, P.; Wolf, P. ACES Micro-wave link data analysis: Status update. In Proceedings of the Journées Systèmes De Référence Spatio Temporels Scientific Developments from Highly Accurate Space Time Reference Systems, Paris, France, 16–18 September 2013; pp. 134–135. [Google Scholar]
- Cacciapuoti, L.; Armano, M.; Much, R.; Sy, O.; Helm, A.; Hess, M.P.; Kehrer, J.; Koller, S.; Niedermaier, T.; Esnault, F.; et al. Testing gravity with cold-atom clocks in space. Eur. Phys. J. D 2020, 74, 164. [Google Scholar] [CrossRef]
- Much, R.; Daganzo, E.; Feltham, S.; Nasca, R.; Hess, M.P.; Stringhetti, L.; Cacciapuoti, L.; Salomon, C. Status of the ACES mission. In Proceedings of the 2009 IEEE International Frequency Control Symposium Joint with the 22nd European Frequency and Time Forum, Besancon, France, 20–24 April 2009; pp. 199–204. [Google Scholar]
- Zhang, X. System design and key technologies of high accuracy time and frequency microwave link for spaces station. Telecommun. Eng. 2017, 57, 407–411. [Google Scholar]
- Sun, W. Satellite in low orbit(champ, grace, goce) and high precision earth gravity field: The latest progress of satellite gravity geodesy and its great influence on geoscience. Crustal Deform. Earthq. 2002, 22, 92–100. [Google Scholar]
- Edward, A.L. A Comparison of Relativistic Impacts on Satellite Timekeeping for Various Orbits. In Proceedings of the 52nd Annual Precise Time and Time Interval Systems and Applications Meeting, Virtual online. 25–28 January 2021; pp. 326–337. [Google Scholar]
- Xie, P.; Zhang, Z.; Zhang, J. Topology transformation based on time division: An improved inter-satellite link structure. In Proceedings of the Chinese Control and Decision Conference (CCDC), Shenyang, China, 9–11 June 2018; pp. 3761–3766. [Google Scholar]
- Hess, M.P.; Kehrer, J.; Kufner, M.; Durand, S.; Hejc, G.; Frühauf, H.; Cacciapuoti, L. ACES MWL status and test results. In Proceedings of the Joint Conference of the IEEE International Frequency Control and the European Frequency and Time Forum (FCS) Proceedings, San Francisco, CA, USA, 2–5 May 2011; pp. 1–8. [Google Scholar]
- Hanson, D.W. Fundamentals of two-way time transfers by satellite. In Proceedings of the 43rd Annual Symposium on Frequency Control, Denver, CO, USA, 31 May–2 June 1989; pp. 174–178. [Google Scholar] [CrossRef]
- Xie, X.; Geng, T.; Zhao, Q.; Cai, H.; Zhang, F.; Wang, X.; Meng, Y. Precise orbit determination for BDS-3 satellites using satellite-ground and inter-satellite link observations. GPS Solut. 2019, 23, 40. [Google Scholar] [CrossRef]
- Ruan, R.; Jia, X.; Feng, L.; Zhu, J.; Wei, Z. Orbit determination and time synchronization for BDS-3 satellites with raw inter-satellite link ranging observations. Satell. Navig. 2020, 1, 8. [Google Scholar] [CrossRef] [Green Version]
- Hobiger, T.; Piester, D.; Baron, P. A correction model of dispersive troposphere delays for the ACES microwave link. Radio Sci. 2013, 48, 131–142. [Google Scholar] [CrossRef]
- Sun, X.; Shen, W.B.; Shen, Z.; Cai, C.; Xu, W.; Zhang, P. Formulation to test gravitational redshift based on the tri-frequency combination of ACES frequency links. Eur. Phys. J. C 2021, 81, 634. [Google Scholar] [CrossRef]
- Yang, Y.; Yang, Y.; Hu, X.; Tang, C.; Guo, R.; Zhou, Z.; Xu, J.; Pan, J.; Su, M. BeiDou-3 broadcast clock estimation by integration of observations of regional tracking stations and inter-satellite links. GPS Solut. 2021, 25, 57. [Google Scholar] [CrossRef]
- Xie, X.; Geng, T.; Zhao, Q.; Lv, Y.; Liu, J. Orbit and clock analysis of BDS-3 satellites using inter-satellite link observations. J. Geod. 2020, 94, 64. [Google Scholar] [CrossRef]
- Guo, Y.; Bai, Y.; Gao, S.; Pan, Z.; Han, Z.; Gao, Y.; Lu, X. A SatelliteGround Precise Time Synchronization Method and Analysis on Time Delay Error Caused by Motion. In Proceedings of the China Satellite Navigation Conference (CSNC) 2021 Proceedings, Nanchang, China, 26–28 May 2021; Volume 3, pp. 158–171. [Google Scholar]
- Han, C.; Cai, Z. Relativistic effects to the onboard BeiDou satellite clocks. Navigation 2019, 66, 49–53. [Google Scholar] [CrossRef] [Green Version]
- Hećimović, Ž. Relativistic effects on satellite navigation. Teh. Vjesn. 2013, 20, 195–203. [Google Scholar]
- Larson, K.M.; Ashby, N.; Hackman, C.; Bertiger, W. An assessment of relativistic effects for low Earth orbiters: The GRACE satellites. Metrologia 2007, 44, 484–490. [Google Scholar] [CrossRef] [Green Version]
- Sun, L.; Gao, S.; Yang, J.; Xiao, F.; Fang, Y.; Feng, S. Relativistic Effect in the Two-Way Time Comparison Between Navigation Satellites. In Proceedings of the China Satellite Navigation Conference (CSNC) 2021 Proceedings, Nanchang, China, 26–28 May 2021; Volume 3, pp. 95–104. [Google Scholar]
- Chen, H.; Wu, H.; Zhou, M.; Qi, J. Orbit Engineering Application and STK Simulation for Microsatellite; Science Press: Beijing, China, 2016; p. 71. [Google Scholar]
- Bisnath, S. Precise Orbit Determination of Low Earth Orbiters with a Single GPS Receiver-Based, Geometric Strategy. 2004, p. 8. Available online: https://unbscholar.lib.unb.ca/islandora/object/unbscholar%3A8487 (accessed on 1 October 2021).
- Kaula, W.M. Theory of Satellite Geodesy; Blaisdell Publishing Company, Dover Publications: New York, NY, USA, 1966; p. 45. [Google Scholar]
- Shao, K.; Gu, D.; Ju, B.; Wang, W.; Wang, Z. Analysis of Tiangong-2 orbit determination and prediction using onboard dual-frequency GNSS data. GPS Solut. 2020, 24, 11. [Google Scholar] [CrossRef]
- Chronopoulos, S.K.; Angelis, C.T.; Koumasis, A.; Drakou, P. Satellite Coverage Analysis for the Investigation of Real-Time Communication in Selected Areas. WSEAS Trans. Commun. 2006, 5, 1965–1972. [Google Scholar]
- Cao, X.; Shen, F.; Zhang, S.; Li, J. Time delay bias between the second and third generation of BeiDou Navigation Satellite System and its effect on precise point positioning. Measurement 2020, 168, 108346. [Google Scholar] [CrossRef]
- Wen, X.; Hao, J.; Hu, X.; Tang, C.; Wang, D.; Chen, L.; Chang, Z.; Zhu, L.; Wu, S.; Li, X. Feasibility Analysis of Time Synchronization of Beidou Satellite Using Inter-Satellite Observation Data. J. Geod. Geodyn. 2018, 38, 1274–1279. [Google Scholar]
- Meynadier, F.; Delva, P.; le Poncin-Lafitte, C.; Guerlin, C.; Wolf, P. Atomic clock ensemble in space (ACES) data analysis. Class. Quantum Gravity 2018, 35, 035018. [Google Scholar] [CrossRef] [Green Version]
- Yang, Y. Research on the Method and Theory of BDS-3 PNT Service SIS Accuracy Improvement Using Inter-Satellite Link; Force Information Engineering University: Zhengzhou, China, 2011. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Strategy |
|---|---|
| Time delay caused by motion | Precise model (With precise orbit and clock products) [15] |
| Atmospheric delay (Tropospheric delay and ionospheric delays) | Precise model [16,17] |
| Relativistic delay | Corrected by precise model |
| Hardware delay | Considering as a constant value over several days [18] |
| PCO delay | Calibrated: provide by manufacturer values for antennas [19] |
| Type | Level of Perturbation Force | ||||||
|---|---|---|---|---|---|---|---|
| Nonspherical Gravitation | Lunisolar Gravitation | Atmospheric Drag | Solar Radiation | Tidal | |||
| Others | Sun | Moon | |||||
| LEO | |||||||
| MEO | |||||||
| GEO | |||||||
| Visible Arc Num. | Start Time (EpSec) | End Time (EpSec) | Duration (s) |
|---|---|---|---|
| 1 | 1009.872 | 1280.094 | 270.222 |
| 2 | 6899.775 | 7244.119 | 344.344 |
| 3 | 67,539.405 | 67,797.561 | 258.156 |
| 4 | 73,389.376 | 73,745.408 | 356.032 |
| 5 | 79,379.406 | 79,631.930 | 252.524 |
| 6 | 85,326.710 | 85,590.520 | 263.810 |
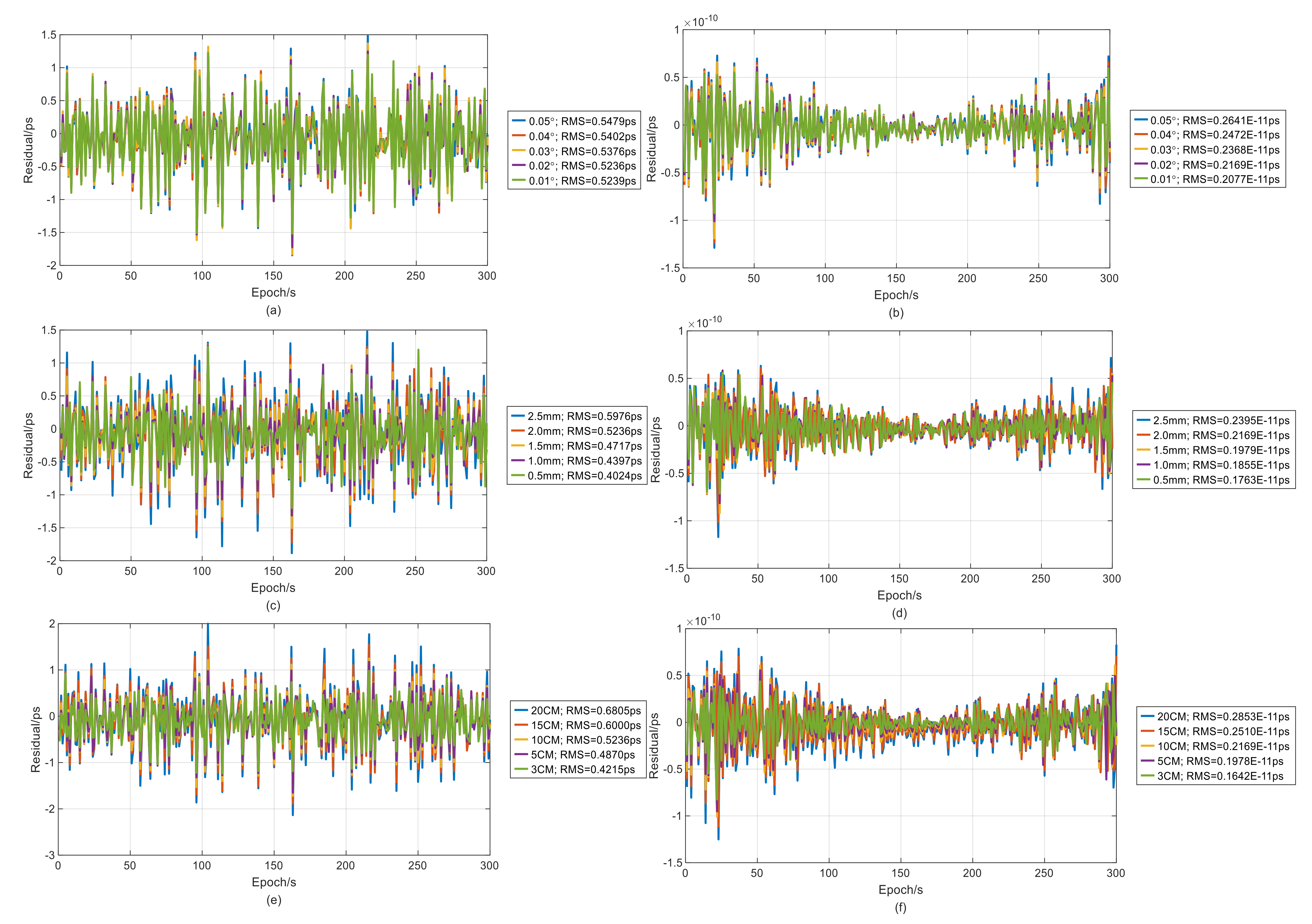
| Attitude Error | Phase Center Calibration Error | POD Error | |
|---|---|---|---|
| RMS of residual | 0.02 ps–0.03 ps | 0.1 ps–0.2 ps | 0.2 ps–0.3 ps |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, Y.; Bai, Y.; Gao, S.; Pan, Z.; Han, Z.; Zou, D.; Lu, X.; Zhang, S. Relativistic Effects on Satellite–Ground Two–Way Precise Time Synchronization. Information 2021, 12, 422. https://doi.org/10.3390/info12100422
Guo Y, Bai Y, Gao S, Pan Z, Han Z, Zou D, Lu X, Zhang S. Relativistic Effects on Satellite–Ground Two–Way Precise Time Synchronization. Information. 2021; 12(10):422. https://doi.org/10.3390/info12100422
Chicago/Turabian StyleGuo, Yanming, Yan Bai, Shuaihe Gao, Zhibing Pan, Zibin Han, Decai Zou, Xiaochun Lu, and Shougang Zhang. 2021. "Relativistic Effects on Satellite–Ground Two–Way Precise Time Synchronization" Information 12, no. 10: 422. https://doi.org/10.3390/info12100422
APA StyleGuo, Y., Bai, Y., Gao, S., Pan, Z., Han, Z., Zou, D., Lu, X., & Zhang, S. (2021). Relativistic Effects on Satellite–Ground Two–Way Precise Time Synchronization. Information, 12(10), 422. https://doi.org/10.3390/info12100422