
LoRaWAN Based Indoor Localization Using Random Neural Networks




Abstract
:1. Introduction
- The novelty of RNN approach with the current literature.
- Developing a novel LoRaWAN RSSI-based indoor localization system.
- Different RNN-based indoor positioning models are trained and tested applying different numbers of hidden neurons.
- Training and testing different RNN-based indoor localization systems with various learning rates.
- A comparative performance analysis of the obtained results with other results in the existing related work.
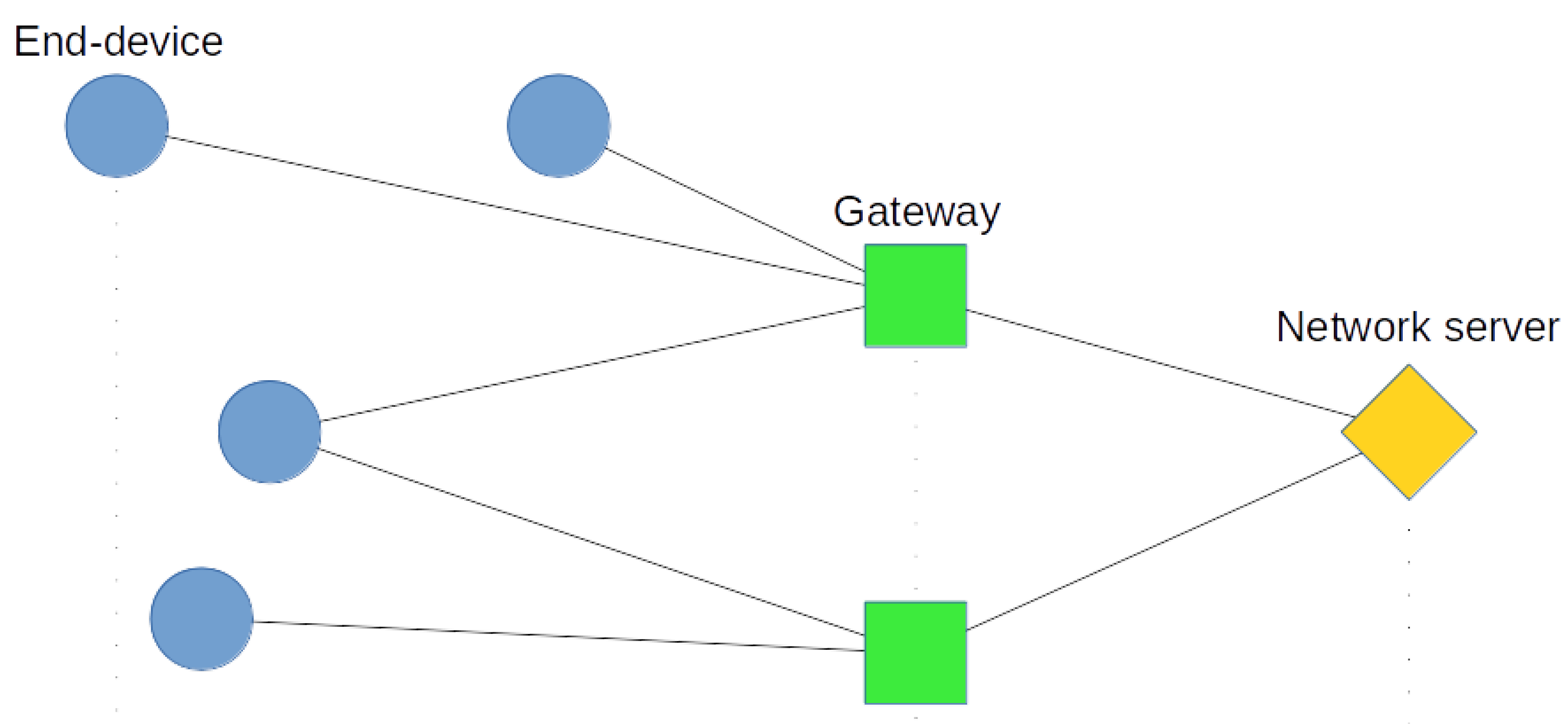
2. Overview of LoRaWAN
3. Related Work
4. Methodology
4.1. Dataset Collection Setup
4.2. Study Environments
4.3. Data Normalization
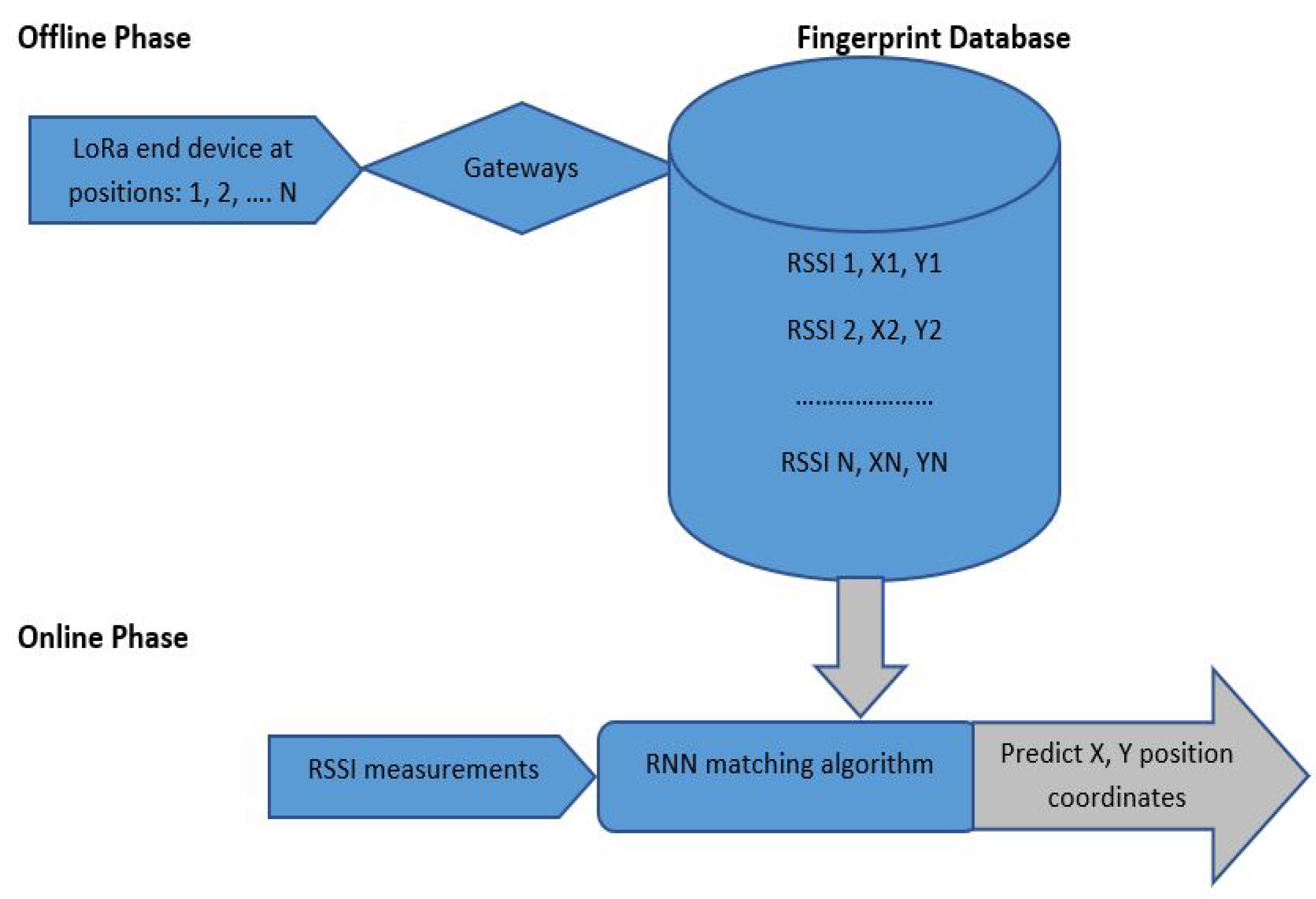
4.4. Proposed LoRaWAN-Based Indoor Localization System Using RNN
5. Results and Analysis
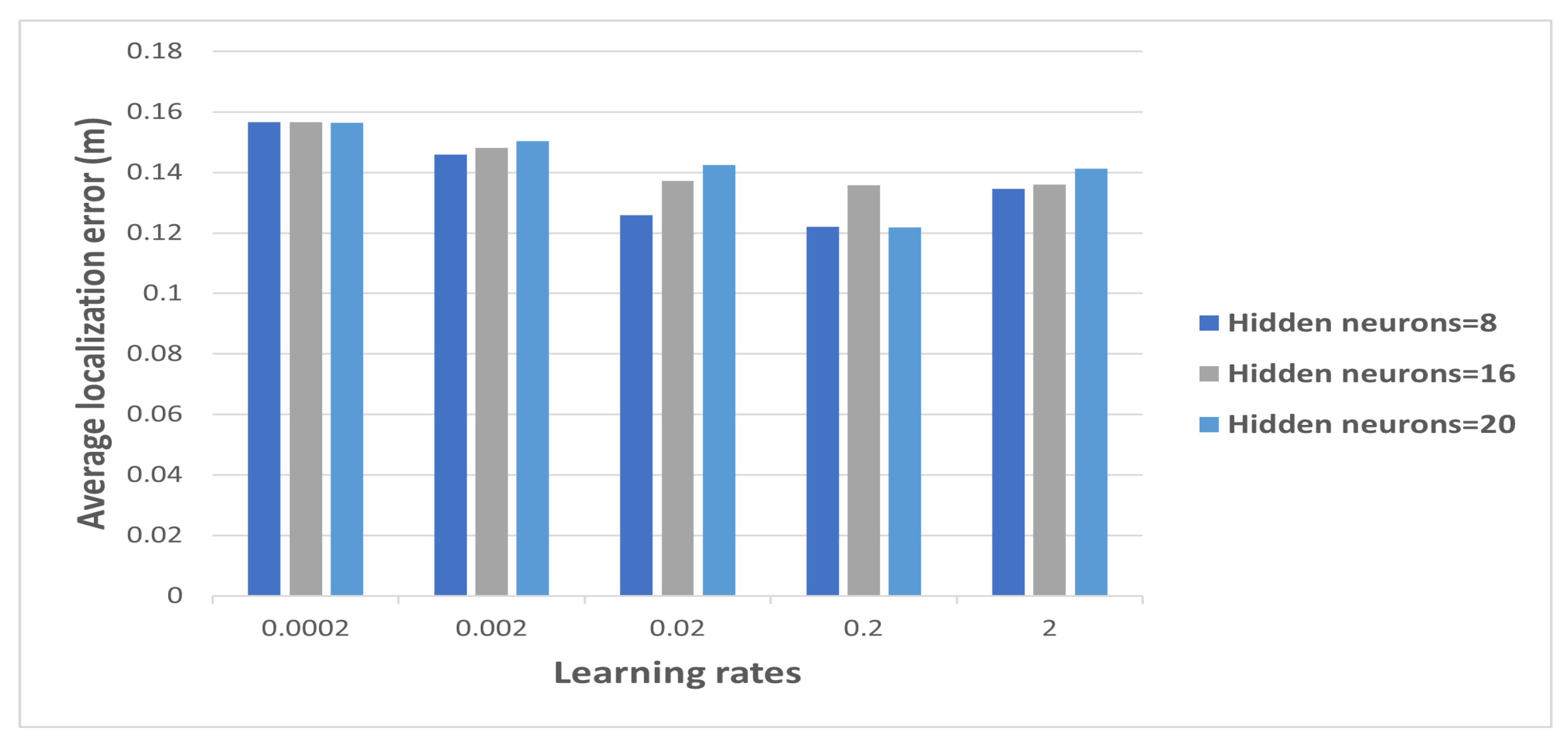
5.1. Results Analysis in LOS
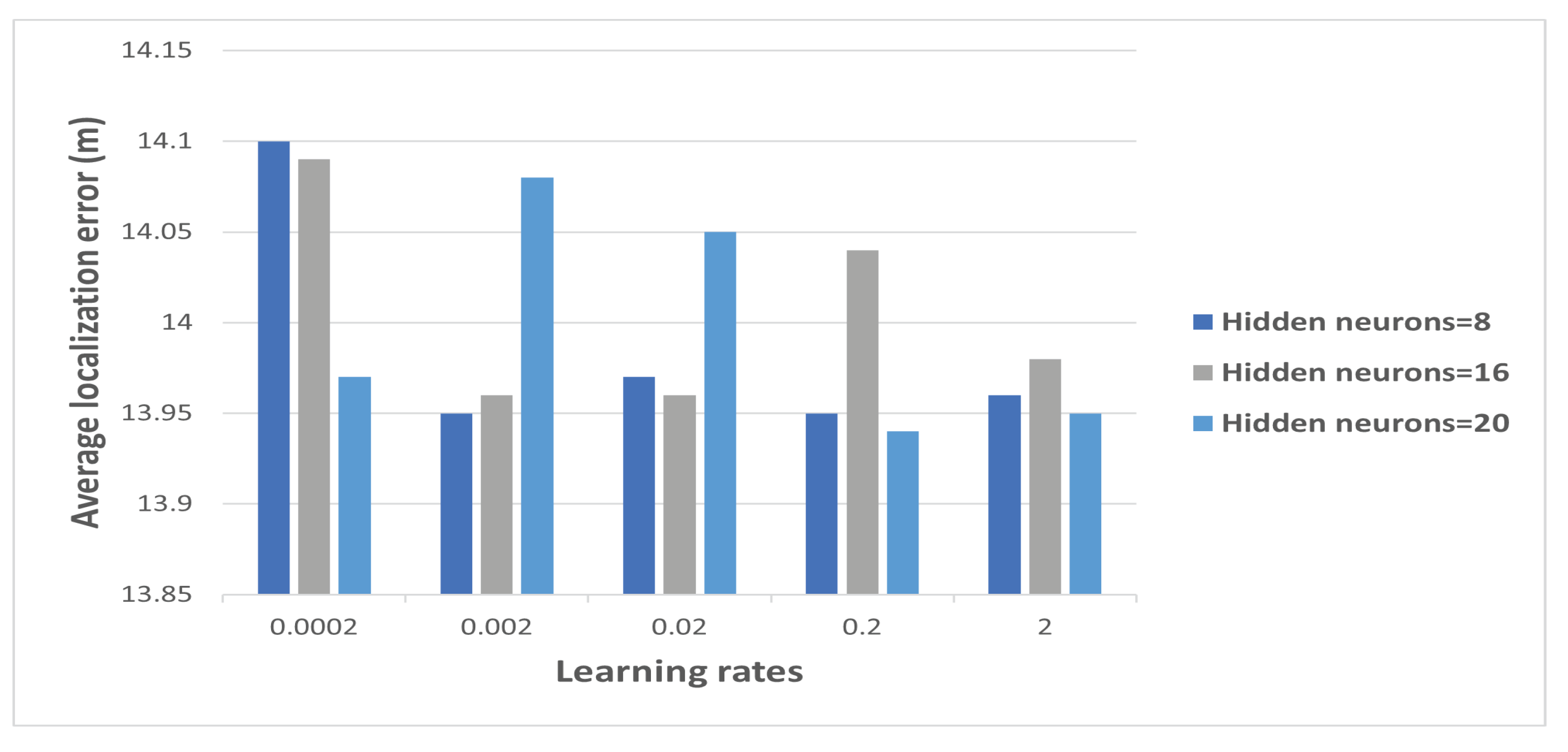
5.2. Results Analysis in NLOS
5.3. Comparative Performance Analysis
6. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Richter, P.; Toledano-Ayala, M. Ubiquitous and Seamless Localization: Fusing GNSS Pseudoranges and WLAN Signal Strengths. Mob. Inf. Syst. 2017, 2017, 1–16. [Google Scholar] [CrossRef] [Green Version]
- Kang, J.M.; Yoon, T.S.; Kim, E.; Park, J.B. Lane-Level Map-Matching Method for Vehicle Localization Using GPS and Camera on a High-Definition Map. Sensors 2020, 20, 2166. [Google Scholar] [CrossRef] [Green Version]
- Yang, Z.; Schafer, J.; Ganz, A. Disaster response: Victims localization using Bluetooth Low Energy sensors. In Proceedings of the 2017 IEEE International Symposium on Technologies for Homeland Security (HST), Waltham, MA, USA, 25–26 April 2017; pp. 31–34. [Google Scholar]
- Poulose, A.; Kim, J.; Han, D.S. A Sensor Fusion Framework for Indoor Localization Using Smartphone Sensors and Wi-Fi RSSI Measurements. Appl. Sci. 2019, 9, 4379. [Google Scholar] [CrossRef] [Green Version]
- Uradzinski, M.; Guo, H.; Liu, X.K.; Yu, M. Advanced Indoor Positioning Using Zigbee Wireless Technology. Wirel. Pers. Commun. 2017, 97, 6509–6518. [Google Scholar] [CrossRef]
- Ingabire, W.; Larijani, H.; Gibson, R.M.; Qureshi, A.-U.-H. Outdoor Node Localization Using Random Neural Networks for Large-Scale Urban IoT LoRa Networks. Algorithms 2021, 14, 307. [Google Scholar] [CrossRef]
- Anjum, M.; Khan, M.A.; Hassan, S.A.; Mahmood, A.; Gidlund, M. Analysis of RSSI fingerprinting in LoRa networks. In Proceedings of the 2019 15th International Wireless Communications & Mobile Computing Conference (IWCMC), Tangier, Morocco, 24–28 June 2019; pp. 1178–1183. [Google Scholar] [CrossRef] [Green Version]
- Semtech, LoRaWANspecificationv1.1. Available online: https://www.lora-alliance.org/technology (accessed on 28 April 2022).
- Bissett, D. Analysing Tdoa Localisation in LoRa Networks; Delft University of Technology: Delft, The Netherlands, 2018. [Google Scholar]
- Daraj, A.K.; Mohammad, A.T.; Mosleh, M.F. Indoor Localization Enhancement Based on Time of Arrival Using Sectoring Method. Int. J. Intell. Syst. Appl. 2020, 12, 1–7. [Google Scholar] [CrossRef]
- Avitabile, G.; Florio, A.; Coviello, G. Angle of Arrival Estimation Through a Full-Hardware Approach for Adaptive Beamforming. IEEE Trans. Circuits Syst. II Express Briefs 2020, 67, 3033–3037. [Google Scholar] [CrossRef]
- Wang, X.; Gao, L.; Mao, S.; Pandey, S. CSI-based Fingerprinting for Indoor Localization: A Deep Learning Approach. IEEE Trans. Veh. Technol. 2017, 66, 763–776. [Google Scholar] [CrossRef] [Green Version]
- Poulose, A.; Han, D.S. UWB Indoor Localization Using Deep Learning LSTM Networks. Appl. Sci. 2020, 10, 6290. [Google Scholar] [CrossRef]
- Abdul, N.; Zghair, K.; Croock, M.S.; Abdul, A.; Taresh, R. Indoor Localization System Using Wi-Fi Technology. Iraqi J. Comput. Commun. Control Syst. Eng. 2019, 19, 69–77. [Google Scholar]
- Hernández, N.; Ocaña, M.; Alonso, J.M.; Kim, E. Continuous space estimation: Increasing wifi-based indoor localization resolution without increasing the site-survey effort. Sensors 2017, 17, 147. [Google Scholar] [CrossRef]
- Zafari, F.; Gkelias, A.; Leung, K.K. A Survey of Indoor Localization Systems and Technologies. IEEE Commun. Surv. Tutorials 2019, 21, 2568–2599. [Google Scholar] [CrossRef] [Green Version]
- Sadowski, S.; Spachos, P. RSSI-Based Indoor Localization With the Internet of Things. IEEE Access 2018, 6, 30149–30161. [Google Scholar] [CrossRef]
- Goldoni, E.; Prando, L.; Vizziello, A.; Savazzi, P.; Gamba, P. Experimental data set analysis of RSSI-based indoor and outdoor localization in LoRa networks. Internet Technol. Lett. 2019, 2, e75. [Google Scholar] [CrossRef] [Green Version]
- Lam, K.-H.; Cheung, C.-C.; Lee, W.-C. RSSI-Based LoRa Localization Systems for Large-Scale Indoor and Outdoor Environments. IEEE Trans. Veh. Technol. 2019, 68, 11778–11791. [Google Scholar] [CrossRef]
- Javed, A.; Larijani, H.; Ahmadinia, A.; Emmanuel, R.; Mannion, M.; Gibson, D. Design and Implementation of a Cloud Enabled Random Neural Network-Based Decentralized Smart Controller With Intelligent Sensor Nodes for HVAC. IEEE Internet Things J. 2016, 4, 393–403. [Google Scholar] [CrossRef] [Green Version]
- Javed, A.; Larijani, H.; Wixted, A.; Emmanuel, R. Random neural networks based cognitive controller for HVAC in non-domestic building using LoRa. In Proceedings of the 2017 IEEE 16th International Conference on Cognitive Informatics & Cognitive Computing (ICCI*CC), Oxford, UK, 26–28 July 2017; pp. 220–226. [Google Scholar]
- Javed, A.; Larijani, H.; Ahmadinia, A.; Gibson, D. Smart Random Neural Network Controller for HVAC Using Cloud Computing Technology. IEEE Trans. Ind. Inform. 2016, 13, 351–360. [Google Scholar] [CrossRef] [Green Version]
- Ahmad, J.; Larijani, H.; Emmanuel, R.; Mannion, M.; Javed, A.; Phillipson, M. Energy demand prediction through novel random neural network predictor for large non-domestic buildings. In Proceedings of the 11th 2017 Annual IEEE International Systems Conference (SysCon), Montreal, QC, Canada, 24–27 April 2017; pp. 1–6. [Google Scholar]
- Qureshi, A.-U.; Larijani, H.; Javed, A.; Mtetwa, N.; Ahmad, J. Intrusion Detection Using Swarm Intelligence. In Proceedings of the 2019 UK/China Emerging Technologies (UCET), Glasgow, UK, 21–22 August 2019; pp. 1–5. [Google Scholar]
- Qureshi, A.-U.; Larijani, H.; Ahmad, J.; Mtetwa, N. A Novel Random Neural Network Based Approach for Intrusion Detection Systems. In Proceedings of the 2018 10th Computer Science and Electronic Engineering (CEEC), Colchester, UK, 19–21 September 2018; pp. 50–55. [Google Scholar]
- Qureshi, A.-U.; Larijani, H.; Mtetwa, N.; Javed, A.; Ahmad, J. RNN-ABC: A New Swarm Optimization Based Technique for Anomaly Detection. Computers 2019, 8, 59. [Google Scholar] [CrossRef] [Green Version]
- Ingabire, W.; Larijani, H.; Gibson, R.M. LoRa RSSI Based Outdoor Localization in an Urban Area Using Random Neural Networks. In Intelligent Computing. Lecture Notes in Networks and Systems; Arai, K., Ed.; Springer: Cham, Switzerland, 2021; Volume 284. [Google Scholar] [CrossRef]
- Cerkez, C.; Aybay, I.; Halici, U. A digital neuron realization for the random neural 431 network model. In Proceedings of the International Conference on Neural Networks, Houston, TX, USA, 12 June 1997; Volume 2, pp. 1000–1004. [Google Scholar]
- Abdelbaki, H.; Gelenbe, E.; El-Khamy, S.E. Analog hardware implementation of the random neural network model. In Proceedings of the IEEE-INNS-ENNS International Joint Conference on Neural Networks, Como, Italy, 27 July 2000; Volume 4, pp. 197–201. [Google Scholar]
- Abdelbaki, H. Random Neural Network Simulator (rnnsim) v. 2. Free Simulator. Available online: ftp://ftp.mathworks.com/pub/contrib/v5/nnet/rnnsimv2 (accessed on 28 April 2022).
- Mohamed, S.; Rubino, G. A study of real-time packet video quality using random neural networks. IEEE Trans. Circuits Syst. Video Technol. 2002, 12, 1071–1083. [Google Scholar] [CrossRef]
- MultiTech. MultiTech Conduit LoRa IoT Starter Kit. Available online: https://www.alliot.co.uk/product/multitech-conduit-iot-starter-kit/ (accessed on 28 April 2022).
- Multitech. Portable, Handheld End-Point Device for Conducting LoRa® Site Surveys (MTDOT-BOX Series). Available online: https://www.multitech.com/brands/multiconnect-mdot-box (accessed on 28 April 2022).
- Tera Term. Tera Term Software. Available online: https://ttssh2.osdn.jp/index.html.en (accessed on 28 April 2022).
- Destiny-College. Destiny-College Building Glasgow City. Available online: https://destiny-college.com/ (accessed on 28 April 2022).
- Gelenbe, E. Random Neural Networks with Negative and Positive Signal and Product Form Solution. Neural Comput. 1989, 1, 502–510. [Google Scholar] [CrossRef]
- Islam, B.; Islam, T.; Kaur, J.; Nirjon, S. LoRaIn: Making a Case for LoRa in Indoor Localization. In Proceedings of the 2019 IEEE International Conference on Pervasive Computing and Communications Workshops (PerCom Workshops), Kyoto, Japan, 11–15 March 2019; pp. 423–426. [Google Scholar] [CrossRef]
- Kim, K.; Li, S.; Heydariaan, M.; Smaoui, N.; Gnawali, O.; Suh, W.; Suh, M.J.; Kim, J.I. Feasibility of LoRa for Smart Home Indoor Localization. Appl. Sci. 2021, 11, 415. [Google Scholar] [CrossRef]
- Henriksson, R. Indoor Positioning in LoRaWAN Networks. Master’s Thesis, Halmers University of Technology, Göteborg, Sweden, 2016. [Google Scholar]
- Han, L.; Jiang, L.; Kong, Q.; Wang, J.; Zhang, A.; Song, S. Indoor Localization within Multi-Story Buildings Using MAC and RSSI Fingerprint Vectors. Sensors 2019, 19, 2433. [Google Scholar] [CrossRef] [Green Version]
- Anjum, M.; Khan, M.A.; Hassan, S.A.; Mahmood, A.; Qureshi, H.K.; Gidlund, M. RSSI Fingerprinting-Based Localization Using Machine Learning in LoRa Networks. IEEE Internet Things Mag. 2020, 3, 53–59. [Google Scholar] [CrossRef]
- Manzoni, P.; Calafate, C.T.; Cano, J.-C.; Hernández-Orallo, E. Indoor Vehicles Geolocalization Using LoRaWAN. Futur. Internet 2019, 11, 124. [Google Scholar] [CrossRef] [Green Version]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Learning Rates | Average Localization Error (m) | ||
|---|---|---|---|
| 8 Hidden Neurons | 16 Hidden Neurons | 20 Hidden Neurons | |
| 0.0002 | 0.1567 | 0.1566 | 0.1565 |
| 0.002 | 0.1459 | 0.1481 | 0.1504 |
| 0.02 | 0.1258 | 0.1373 | 0.1424 |
| 0.2 | 0.1220 | 0.1358 | 0.1219 |
| 2 | 0.1345 | 0.136 | 0.1412 |
| Learning Rates | Average Localization Error (m) | ||
|---|---|---|---|
| 8 Hidden Neurons | 16 Hidden Neurons | 20 Hidden Neurons | |
| 0.0002 | 14.10 | 14.09 | 13.97 |
| 0.002 | 13.95 | 13.97 | 14.08 |
| 0.02 | 13.97 | 13.96 | 14.05 |
| 0.2 | 13.95 | 14.04 | 13.94 |
| 2 | 13.96 | 13.98 | 13.95 |
| Research Study | AE (m)-LOS | AE (m)-NLOS | Method |
|---|---|---|---|
| Proposed localization system | 0.12 | 13.94 | RNN |
| Islam et al. [37] | 0.71 | 3.72 | Polynomial regression |
| Sadowski et al. [17] | 1.19 | - | Trilateration |
| Han et al. [40] | - | 1.8 | KNN |
| Kim et al. [38] | 1.6 | 3.1 | Trilateration |
| Anjum et al. [7] | 3.06 | - | Path loss |
| Henriksson [39] | 8 | - | Time of Arrival |
| Anjum et al. [41] | - | 9.38 | Smoothing spline |
| Manzoni et al. [42] | - | 20 | Trilateration |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ingabire, W.; Larijani, H.; Gibson, R.M.; Qureshi, A.-U.-H. LoRaWAN Based Indoor Localization Using Random Neural Networks. Information 2022, 13, 303. https://doi.org/10.3390/info13060303
Ingabire W, Larijani H, Gibson RM, Qureshi A-U-H. LoRaWAN Based Indoor Localization Using Random Neural Networks. Information. 2022; 13(6):303. https://doi.org/10.3390/info13060303
Chicago/Turabian StyleIngabire, Winfred, Hadi Larijani, Ryan M. Gibson, and Ayyaz-UI-Haq Qureshi. 2022. "LoRaWAN Based Indoor Localization Using Random Neural Networks" Information 13, no. 6: 303. https://doi.org/10.3390/info13060303
APA StyleIngabire, W., Larijani, H., Gibson, R. M., & Qureshi, A. -U. -H. (2022). LoRaWAN Based Indoor Localization Using Random Neural Networks. Information, 13(6), 303. https://doi.org/10.3390/info13060303