

Localization of False Data Injection Attack in Smart Grids Based on SSA-CNN

Abstract
:1. Introduction
- A data-driven localization method for FDIAs in smart grids is proposed, which uses a CNN classifier to locate FDIAs and the attacked buses and lines.
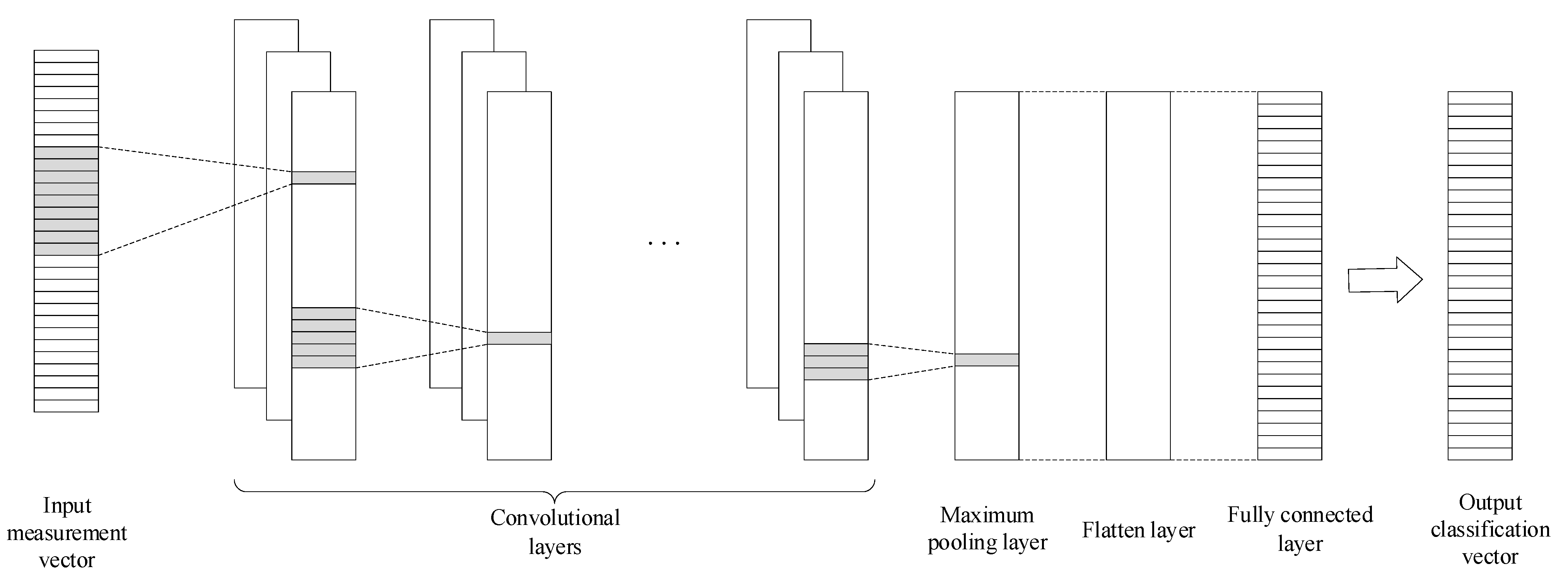
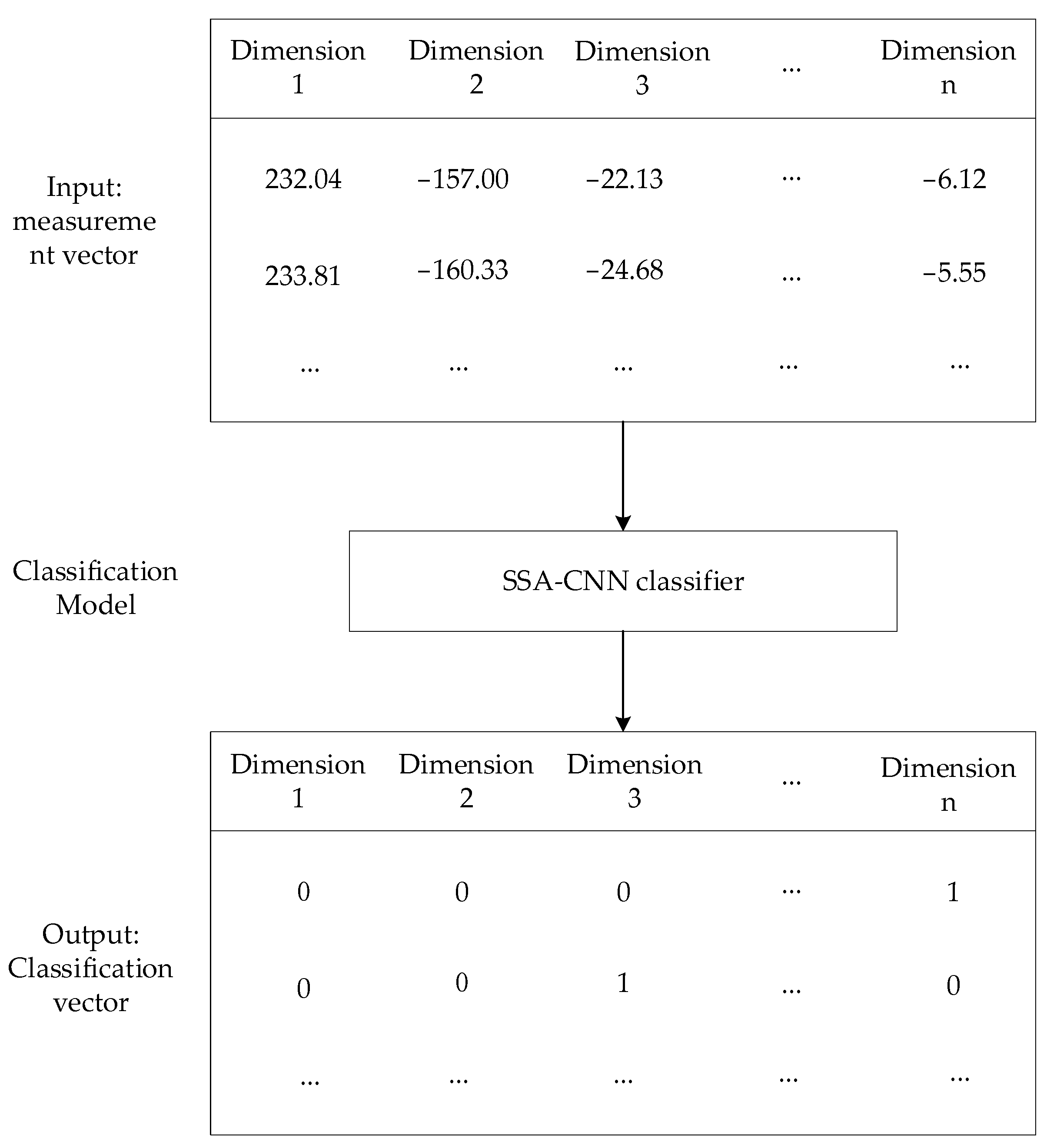
- A novel CNN structure with measurement vectors as input and classification vectors as output is designed. A SSA is used to optimize multiple parameters to obtain the CNN model with optimal localization effect. At the same time, the CNN model will change according to the different optimization results and thus improve the localization accuracy.
- To the best of our knowledge, this article is the first to develop the SSA–CNN to locate FDIAs in smart grids. The proposed method is verified on the measurement data set containing invisible FDIAs and compared with other advanced localization methods for FDIAs. The results show that the proposed method has the highest localization accuracy.
2. Models
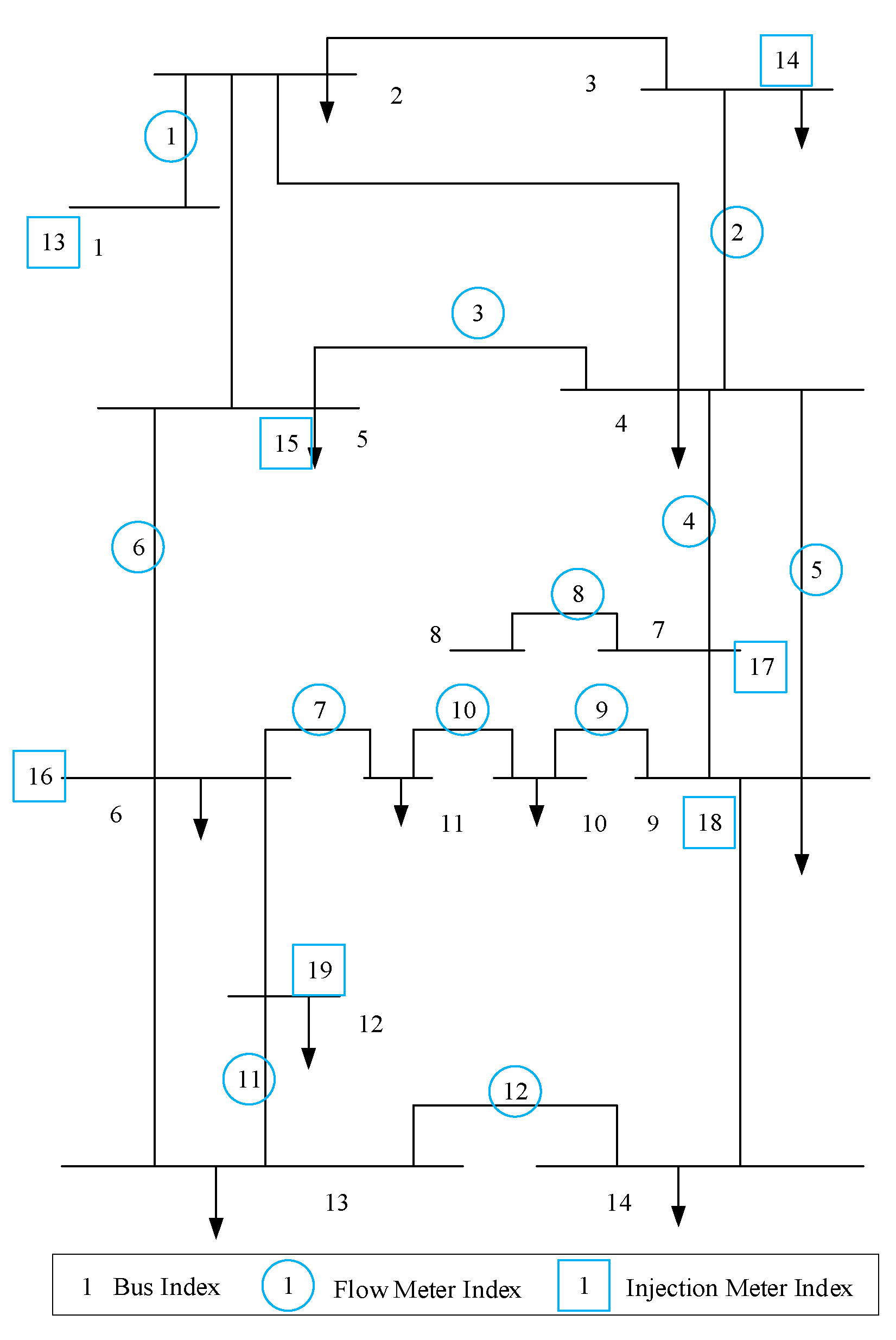
2.1. Power System Model
2.2. False Data Injection Attack Model
3. Localization of a False Data Injection Attack Based on SSA–CNN
3.1. The CNN Model
- (1)
- Using a function, such as sigmoid, is computationally intensive, while using ReLU saves a significant amount of computational effort.
- (2)
- For deep networks, when the sigmoid function is backpropagated, the gradient will easily disappear, resulting in training failure of the deep network.
- (3)
- ReLU causes the output of some neurons to be 0. This reduces the interdependence of the parameters, which alleviates the overfitting problem.
3.2. Sparrow Search Algorithm
- (1)
- In the whole population, explorers are energy-rich and are responsible for searching areas with sufficient food and providing foraging areas and directions for followers. The high-energy reserve in the algorithm is related to the fitness value of individual sparrows.
- (2)
- The individual sparrows will send an alert signal when they find natural enemies (predators) and, when the alert value is greater than the safe value, the explorers and the followers will enter the safe area to forage.
- (3)
- The identities of the explorers and followers can be interchanged, but the proportion of individual sparrows in the whole population will not change between the two identities.
- (4)
- Sparrows with higher energy reserves will act as explorers. In order to obtain more energy, the lower energy followers may fly to other places to forage for food.
- (5)
- During foraging, the followers will always be able to follow the explorers with higher energy reserves to forage. In order to improve their predation rate, they will spy on the explorers and thus compete for more resources.
- (6)
- When there is a threat, the sparrows at the edge of the group will move to the safe area, while the sparrows in the middle of the group will move randomly.
3.3. Localization Method for FDIAs Based on the SSA–CNN
4. Simulation Experiments
4.1. Simulation Experiment Settings
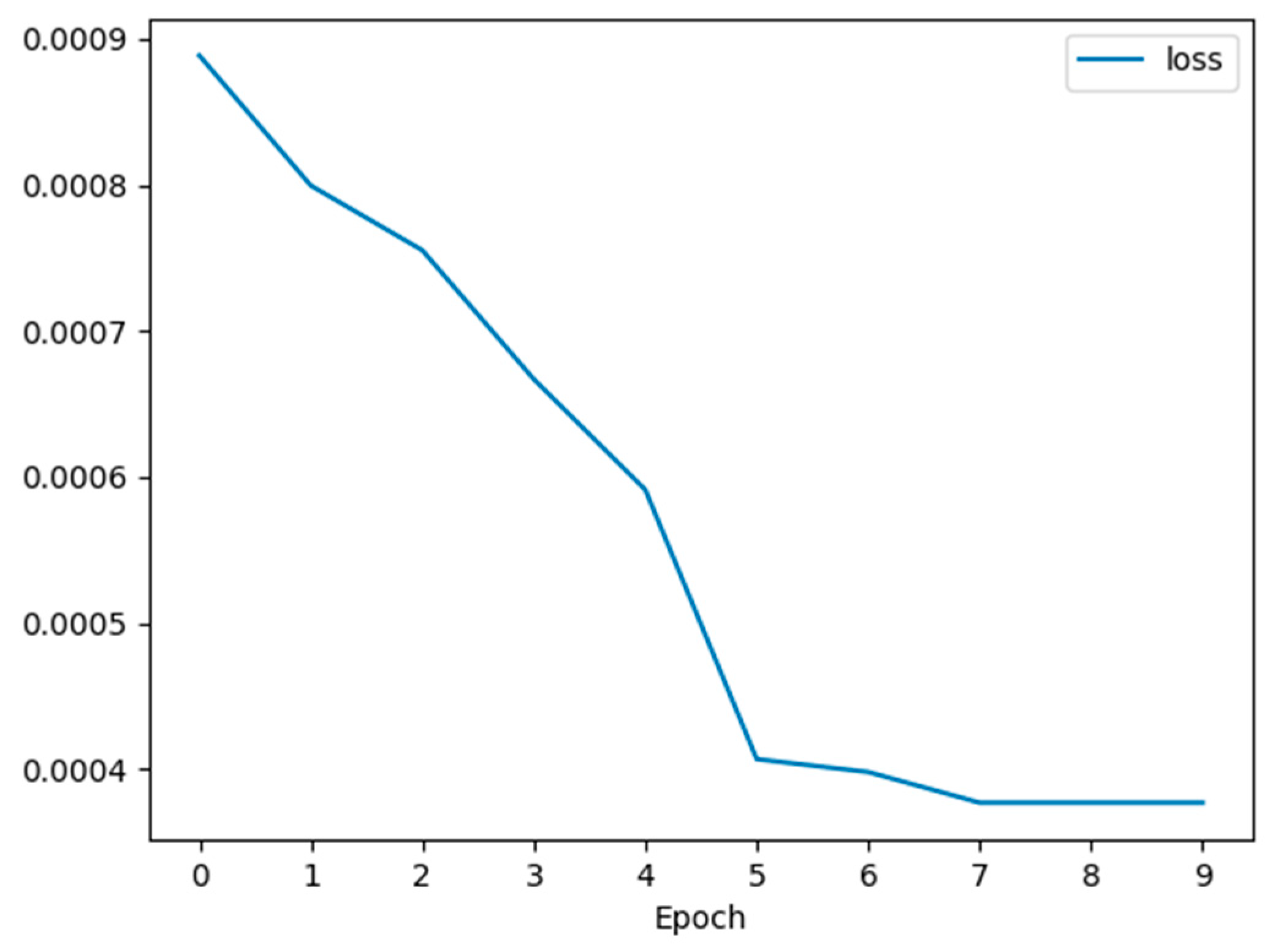
4.2. Simulation Results of the SSA–CNN
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Qin, B.Y.; Liu, D. Research Progresses and Prospects on Analysis and Control of Cyber-physical System for Power Grid. In Proceedings of the CSEE, Lisbon, Portugal, 18–20 October 2020; Volume 40, pp. 5816–5827. [Google Scholar] [CrossRef]
- Wang, Q.; Li, M.Y.; Tang, Y.; Ni, M. A Review of Research on Cyber Attacks and Defense of Power Information Physical Systems(I) Modeling and Assessment. Autom. Electr. Power Syst. 2019, 43, 9–21. Available online: https://kns.cnki.net/kcms/detail/32.1180.TP.20190107.0721.004.html (accessed on 7 January 2023).
- Yang, Y.Z.; Liu, W.X.; Li, C.Z.; Liu, G.M.; Zang, S.; Zang, Y.W. Review of FDIA Detection Methods for Electric Power SCADA System. In Proceedings of the CSEE, Lisbon, Portugal, 10–12 April 2022; pp. 1–22. Available online: https://kns.cnki.net/kcms/detail/11.2107.tm.20221101.1539.003.html (accessed on 29 December 2022).
- Xie, L.; Mo, Y.L.; Sinopoli, B. Integrity Data Attacks in Power Market Operations. IEEE Trans. Smart Grid 2011, 2, 659–666. [Google Scholar] [CrossRef]
- Tan, S.; Song, W.Z.; Stewart, M.; Yang, J.J.; Tong, L. Online Data Integrity Attacks Against Real-Time Electrical Market in Smart Grid. IEEE Trans. Smart Grid 2018, 9, 313–322. [Google Scholar] [CrossRef]
- Jokar, P.; Arianpoo, N.; Leung, V.C.M. Electricity Theft Detection in AMI Using Customers’ Consumption Patterns. IEEE Trans. Smart Grid 2016, 7, 216–226. [Google Scholar] [CrossRef]
- Guo, Q.L.; Xin, S.J.; Wang, J.H.; Sun, H.B. Comprehensive Security Assessment for a Cyber Physical Energy System: A Lesson from Ukraine’s Blackout. Autom. Electr. Power Syst. 2016, 40, 145–147. Available online: https://kns.cnki.net/kcms/detail/32.1180.tp.20160203.1139.002.html (accessed on 13 January 2023).
- Kurt, M.N.; Yilmaz, Y.; Wang, X.D. Real-Time Detection of Hybrid and Stealthy Cyber-Attacks in Smart Grid. IEEE Trans. Inf. Forensics Secur. 2019, 14, 498–513. [Google Scholar] [CrossRef] [Green Version]
- Luo, X.Y.; Pan, X.Y.; Wang, X.Y.; Guan, X.P. Detection of False Data Injection Attack in Smart Grid via Adaptive Kalman Filtering. Acta Autom. Sin. 2022, 48, 2960–2971. [Google Scholar] [CrossRef]
- Sargolzaei, A.; Yazdani, K.; Abbaspour, A.; Crane, C.D., III; Dixon, W.E. Detection and Mitigation of False Data Injection Attacks in Networked Control Systems. IEEE Trans. Ind. Inform. 2020, 16, 4281–4292. [Google Scholar] [CrossRef]
- Jiang, F.; Liu, B.W.; Li, H.; Liao, H.T.; Zhang, H.; Lu, X.Q.; Peng, J.; Huang, Z.W. A False Data Injection Attack Detection Method for Cooperative Charging Systems. IEEE Trans. Ind. Appl. 2022, 58, 3946–3956. [Google Scholar] [CrossRef]
- Chen, B.Y.; Li, H.B.; Li, B. Application Research on Pseudo Measurement Modeling and AUKF in FDIAs Identification of Distribution Network. Power Syst. Technol. 2019, 43, 3226–3236. [Google Scholar] [CrossRef]
- Cheng, G.; Lin, Y.Z.; Zhao, J.B.; Yan, J. A Highly Discriminative Detector Against False Data Injection Attacks in AC State Estimation. IEEE Trans. Smart Grid 2022, 13, 2318–2330. [Google Scholar] [CrossRef]
- Rashed, M.; Kamruzzaman, J.; Gondal, I.; Islam, S. False Data Detection in a Clustered Smart Grid Using Unscented Kalman Filter. IEEE Access 2022, 10, 78548–78556. [Google Scholar] [CrossRef]
- Luo, X.Y.; Li, Y.T.; Wang, X.Y.; Guan, X.P. Interval Observer-Based Detection and Localization Against False Data Injection Attack in Smart Grids. IEEE Internet Things J. 2021, 8, 657–671. [Google Scholar] [CrossRef]
- Wang, X.Y.; Luo, X.Y.; Zhang, M.Y.; Jiang, J.P.; Guan, X.P. Detection and Isolation of False Data Injection Attacks in Smart Grid via Unknown Input Interval Observer. IEEE Internet Things J. 2020, 7, 3214–3229. [Google Scholar] [CrossRef]
- Li, Q.; Zhang, J.N.; Zhao, J.B.; Ye, J.; Song, W.Z.; Li, F.Y. Adaptive Hierarchical Cyber Attack Detection and Localization in Active Distribution Systems. IEEE Trans. Smart Grid 2022, 13, 2369–2380. [Google Scholar] [CrossRef]
- Musleh, A.S.; Chen, G.; Dong, Z.Y. A Survey on the Detection Algorithms for False Data Injection Attacks in Smart Grids. IEEE Trans. Smart Grid 2020, 11, 2218–2234. [Google Scholar] [CrossRef]
- Jevtic, A.; Zhang, F.G.; Li, Q.H.; Ilic, M. Physics- and Learning-based Detection and Localization of False Data Injections in Automatic Generation Control. IFAC-PapersOnLine 2018, 51, 702–707. [Google Scholar] [CrossRef]
- Ganjkhani, M.; Gilanifar, M.; Giraldo, J.; Parvania, M. Integrated Cyber and Physical Anomaly Location and Classification in Power Distribution Systems. IEEE Trans. Ind. Inform. 2021, 17, 7040–7049. [Google Scholar] [CrossRef]
- Boyaci, O.; Narimani, M.R.; Davis, K.R.; Ismail, M.; Overbye, T.J.; Serpedin, E. Joint Detection and Localization of Stealth False Data Injection Attacks in Smart Grids Using Graph Neural Networks. IEEE Trans. Smart Grid 2022, 13, 807–819. [Google Scholar] [CrossRef]
- Huang, X.; Qin, Z.J.; Xie, M.; Liu, H.; Meng, L. Defense of Massive False Data Injection Attack via Sparse Attack Points Considering Uncertain Topological Changes. J. Mod. Power Syst. Clean Energy 2022, 10, 1588–1598. [Google Scholar] [CrossRef]
- Adhikari, U.; Morris, T.H.; Pan, S. Applying Hoeffding Adaptive Trees for Real-Time Cyber-Power Event and Intrusion Classification. IEEE Trans. Smart Grid 2018, 9, 4049–4060. [Google Scholar] [CrossRef]
- Wang, Y.B.; Xia, M.C.; Yang, Q.; Song, Y.G.; Chen, Q.F.; Chen, Y.Y. Augmented State Estimation of Line Parameters in Active Power Distribution Systems with Phasor Measurement Units. IEEE Trans. Power Deliv. 2022, 37, 3835–3845. [Google Scholar] [CrossRef]
- Liu, X.R.; Chang, P.; Sun, Q.Y. Grid False Data Injection Attacks Detection Based on XGBoost and Unscented Kalman Filter Adaptive Hybrid Prediction. In Proceedings of the CSEE, Rome, Italy, 21–23 June 2021; Volume 41, pp. 5462–5476. [Google Scholar] [CrossRef]
- Wang, S.W.; Bi, S.Z.; Zhang, Y.J.A. Locational Detection of the False Data Injection Attack in a Smart Grid: A Multilabel Classification Approach. IEEE Internet Things J. 2020, 7, 8218–8227. [Google Scholar] [CrossRef]
- Li, Y.L.; Wang, S.Q.; Chen, Q.R.; Wang, X.G. Comparative study of several new swarm intelligence optimization algorithms. Comput. Eng. Appl. 2020, 56, 1–12. Available online: https://kns.cnki.net/kcms/detail/11.2127.TP.20201015.1639.004.html (accessed on 19 January 2023).
- Xue, J.K.; Shen, B. A novel swarm intelligence optimization approach: Sparrow search algorithm. Syst. Sci. Control Eng. 2020, 8, 22–34. [Google Scholar] [CrossRef]
- Jindal, A.; Dua, A.; Kaur, K.; Singh, M.; Kumar, N.; Mishra, S. Decision Tree and SVM-Based Data Analytics for Theft Detection in Smart Grid. IEEE Trans. Ind. Inform. 2016, 12, 1005–1016. [Google Scholar] [CrossRef]
- Wang, D.F.; Wang, X.J.; Zhang, Y.; Jin, L. Detection of power grid disturbances and cyber-attacks based on machine learning. J. Inf. Secur. Appl. 2019, 46, 42–52. [Google Scholar] [CrossRef]
- Wang, Q.; Li, F.; Tang, Y.; Xu, Y. Integrating Model-Driven and Data-Driven Methods for Power System Frequency Stability Assessment and Control. IEEE Trans. Power Syst. 2019, 34, 4557–4568. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Number |
|---|---|
| Buses | 14 |
| Lines | 20 |
| Total Measurements | 19 |
| Injection Measurements | 7 |
| Flow Measurements | 12 |
| Unmeasured Lines | 8 |
| Model | Hyperparameter | Optimization Scope | Optimization Results | |
|---|---|---|---|---|
| IEEE-14 | IEEE-118 | |||
| CNN | learning rate | [0.001, 0.01] | 0.0036 | 0.0020 |
| number of iterations | [50, 200] | 83 | 175 | |
| batch size | [100, 200] | 190 | 157 | |
| number of filters | {16, 32, 64, 128, 256} | 64 | 128 | |
| length of convolutional kernels | [2, 5] | 3 | 2 | |
| number of convolutional layers | [2, 5] | 3 | 4 | |
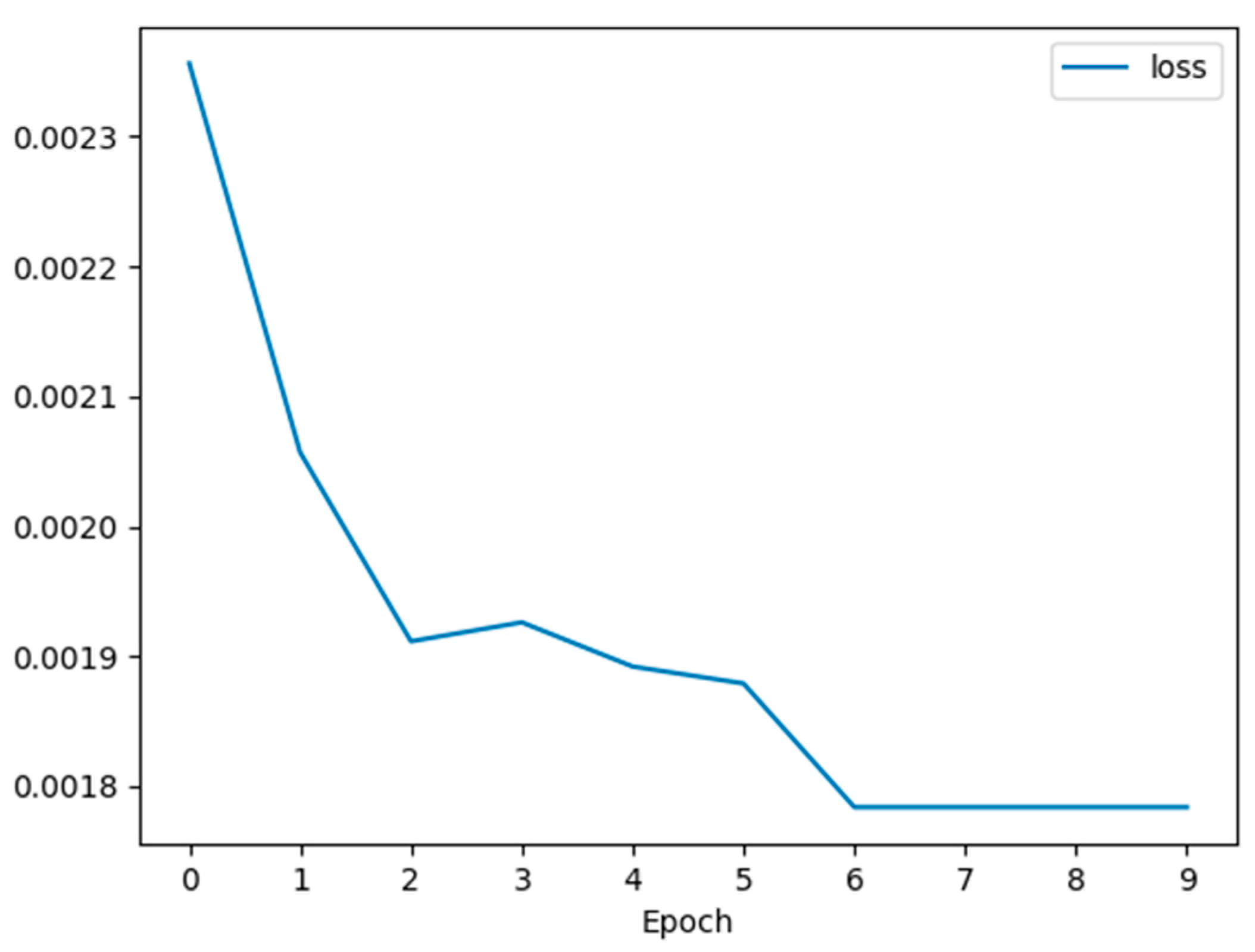
| Number of Iterations | IEEE14 | IEEE118 |
|---|---|---|
| 0 | 0.00089 | 0.00236 |
| 1 | 0.00080 | 0.00206 |
| 2 | 0.00076 | 0.00191 |
| 3 | 0.00067 | 0.00193 |
| 4 | 0.00059 | 0.00189 |
| 5 | 0.00041 | 0.00188 |
| 6 | 0.00040 | 0.00178 |
| 7 | 0.00038 | 0.00178 |
| 8 | 0.00038 | 0.00178 |
| 9 | 0.00038 | 0.00178 |
| IEEE-14 | IEEE-118 | |||||
|---|---|---|---|---|---|---|
| Performance Index | ||||||
| SSA–CNN | 99.85 | 0.03 | 99.89 | 97.14 | 0.03 | 98.27 |
| CNN | 97.34 | 1.59 | 96.99 | 89.34 | 0.23 | 92.19 |
| DNN | 92.95 | 0.43 | 95.89 | 93.01 | 2.56 | 93.72 |
| DT | 75.37 | 1.18 | 77.00 | 72.31 | 1.33 | 73.18 |
| KNN | 79.78 | 0.94 | 87.78 | 56.61 | 1.12 | 63.60 |
| ELM | 93.79 | 1.34 | 95.40 | 88.78 | 2.40 | 91.58 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shen, K.; Yan, W.; Ni, H.; Chu, J. Localization of False Data Injection Attack in Smart Grids Based on SSA-CNN. Information 2023, 14, 180. https://doi.org/10.3390/info14030180
Shen K, Yan W, Ni H, Chu J. Localization of False Data Injection Attack in Smart Grids Based on SSA-CNN. Information. 2023; 14(3):180. https://doi.org/10.3390/info14030180
Chicago/Turabian StyleShen, Kelei, Wenxu Yan, Hongyu Ni, and Jie Chu. 2023. "Localization of False Data Injection Attack in Smart Grids Based on SSA-CNN" Information 14, no. 3: 180. https://doi.org/10.3390/info14030180
APA StyleShen, K., Yan, W., Ni, H., & Chu, J. (2023). Localization of False Data Injection Attack in Smart Grids Based on SSA-CNN. Information, 14(3), 180. https://doi.org/10.3390/info14030180