

Sharing Augmented Reality between a Patient and a Clinician for Assessment and Rehabilitation in Daily Living Activities †

 ,
,  ,
,  , and
, and 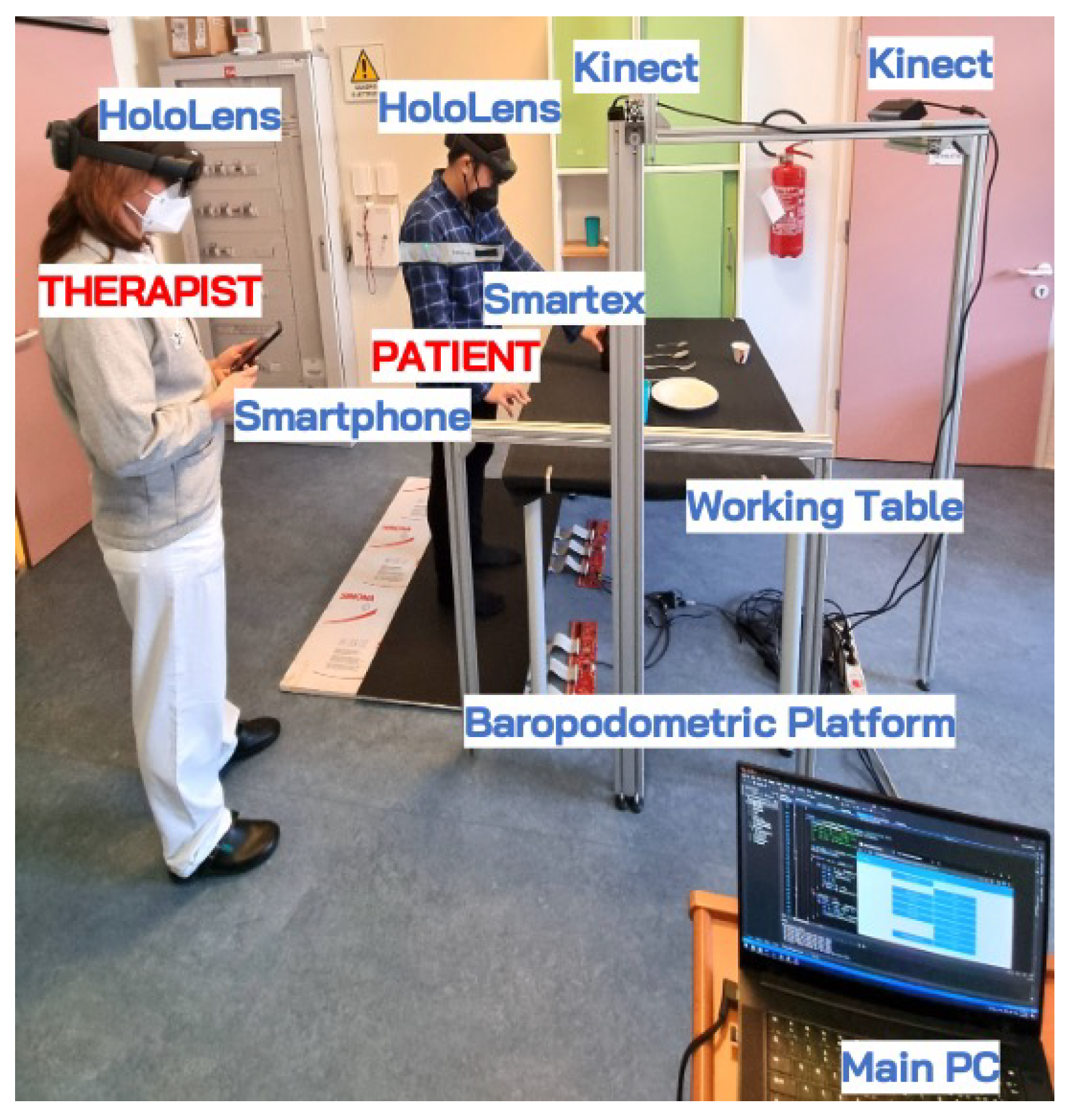{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- In the introduction, the issues about ADL assessment are discussed.
- In the section that follows, the current status and implementations of ADL assessment are examined.
- In the third section, the proposed ADL framework is explained in detail.
- In the fourth section, the specific ADL scenario for setting up the table is introduced.
- In the fifth section, the algorithm, and techniques used for detecting and identifying the objects of interest are presented.
- In the sixth section, the outcomes of the metric evaluation based on the acquired data are investigated.
- In the seventh section, the findings of the user study conducted, which compared healthy testers to patients, are reported.
- In the eighth section, the attributes and benefits of the offline interface provided to the therapists are shown.
- In the final section, the conclusions reached are elucidated.
2. Related Work
3. ADL Framework
3.1. Visualization Devices
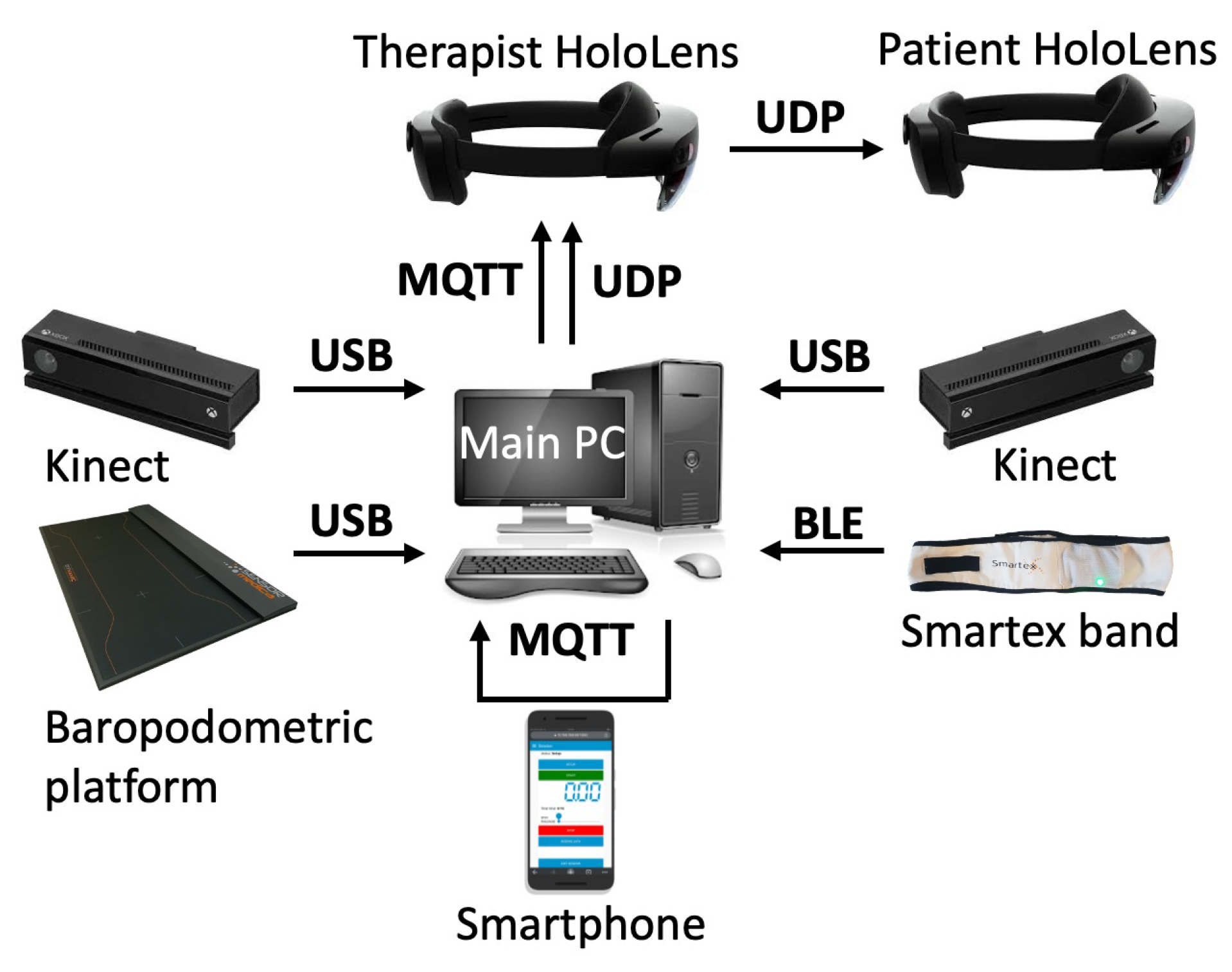
3.2. Distributed Measurement System
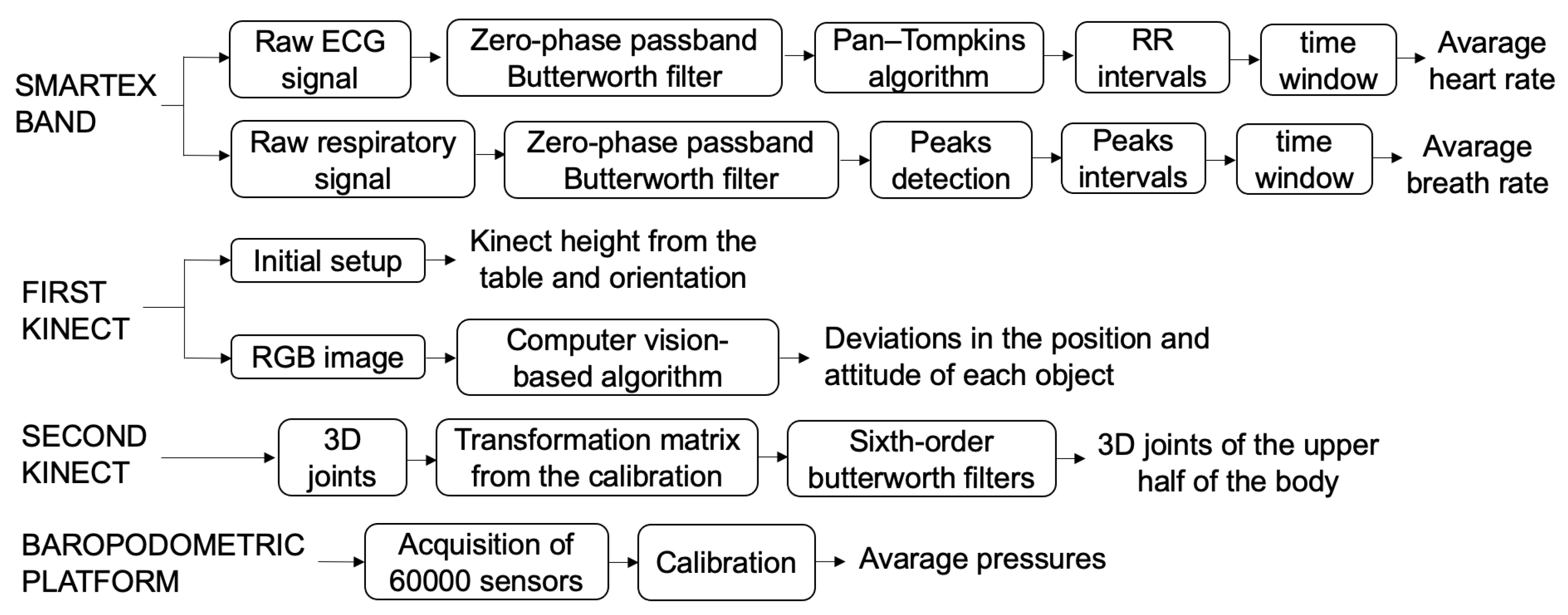
- Two time-of-flight depth cameras, such as the Microsoft Kinect v2, with the first one in front of the patient, used to determine where the position of the body joints are in 3D space [21]; the second one, above the table, used to capture an RGB image (1920 × 1080) for the computer vision based-algorithm and to measure the height from the table and and check its orientation during the initial setup phase.
- A wearable band system developed by the company Smartex s.r.l of Navacchio (PI), Italy. It continuously monitors several physiological parameters. In particular, the system can simultaneously acquire the patient’s electrocardiographic (ECG) and respiratory signals.
- The baropodometric platform used for non-invasive static and dynamic pressure measurement and body stability analysis is a customized mode of the FreeMed family manufactured by the italian company Sensor Medica of Guidonia Montecelio (RM). The platform, which measures 56 × 120 cm, consists of two units, the sum of which results in 6000 24k gold-coated resistive sensors with frequency acquisition up to 400 Hz.
- The main PC, where all raw sensor data are processed, stored, and sent.
3.3. Software Development and Communication Protocols
3.4. Extrinsic Parameters Calibration
4. Specific ADL in the Kitchen Environment
- (1)
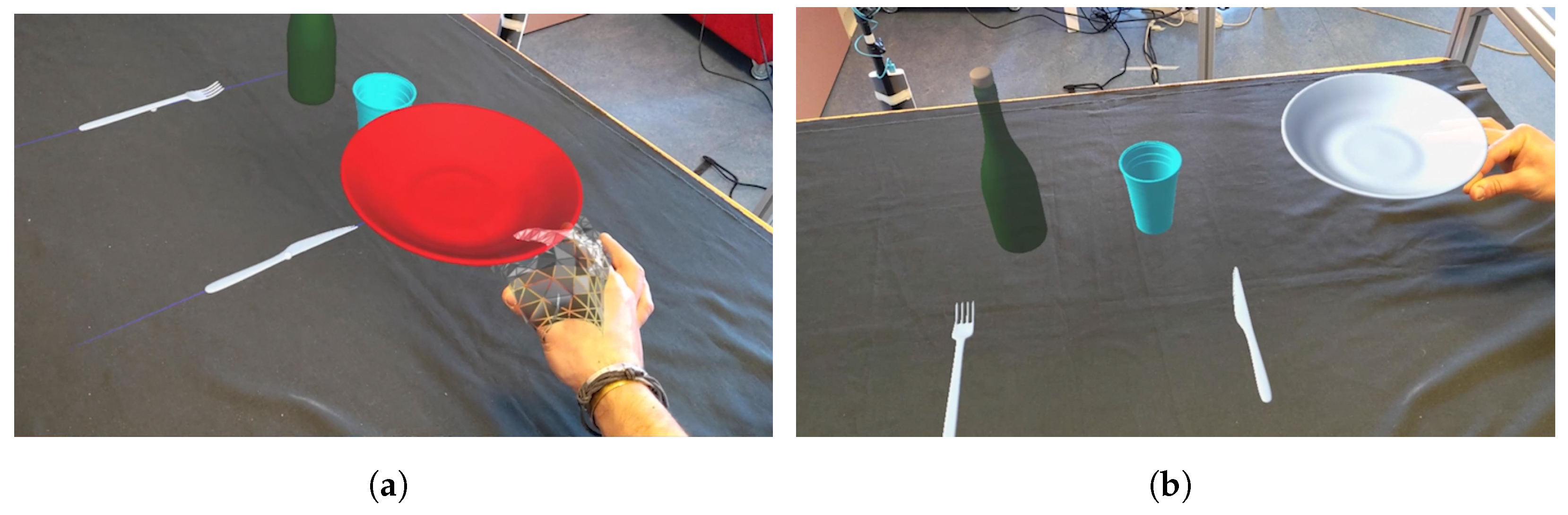
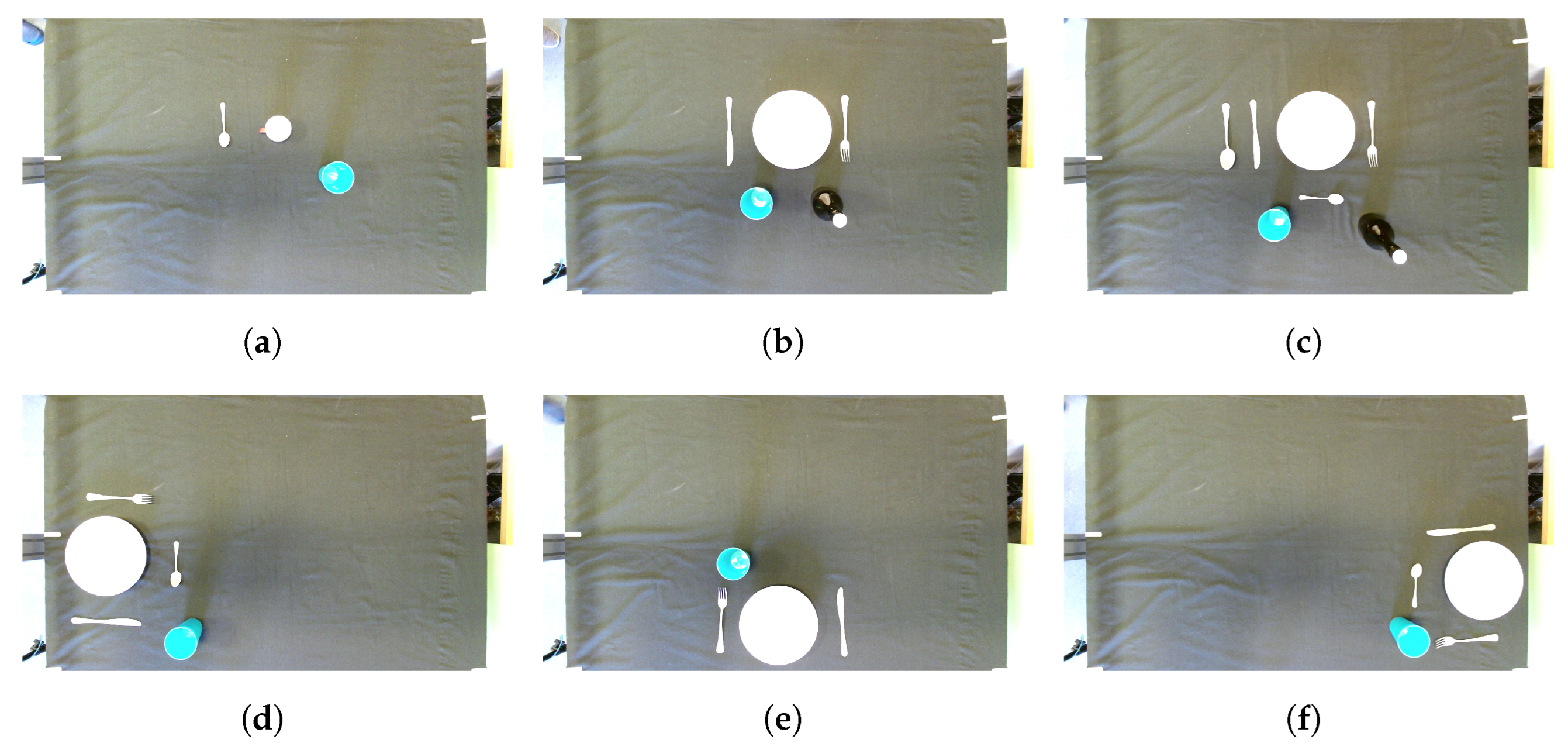
- Wearing a head-mounted Microsoft HoloLens 2, the therapist sets the table with virtual objects, Figure 5a. A handheld device’s graphical interface allows the therapist to select the type and number of objects. Depending on the type of patient being assessed, therapist can adjust the complexity of the setup as needed. During this phase, the patient wearing another HoloLens 2 can view the virtual environment setup from his point of view, Figure 5b.
- (2)
- Once finished, the patient can view the virtual environment previously set up by the therapist and must try to match the virtual objects with the real ones.
- (3)
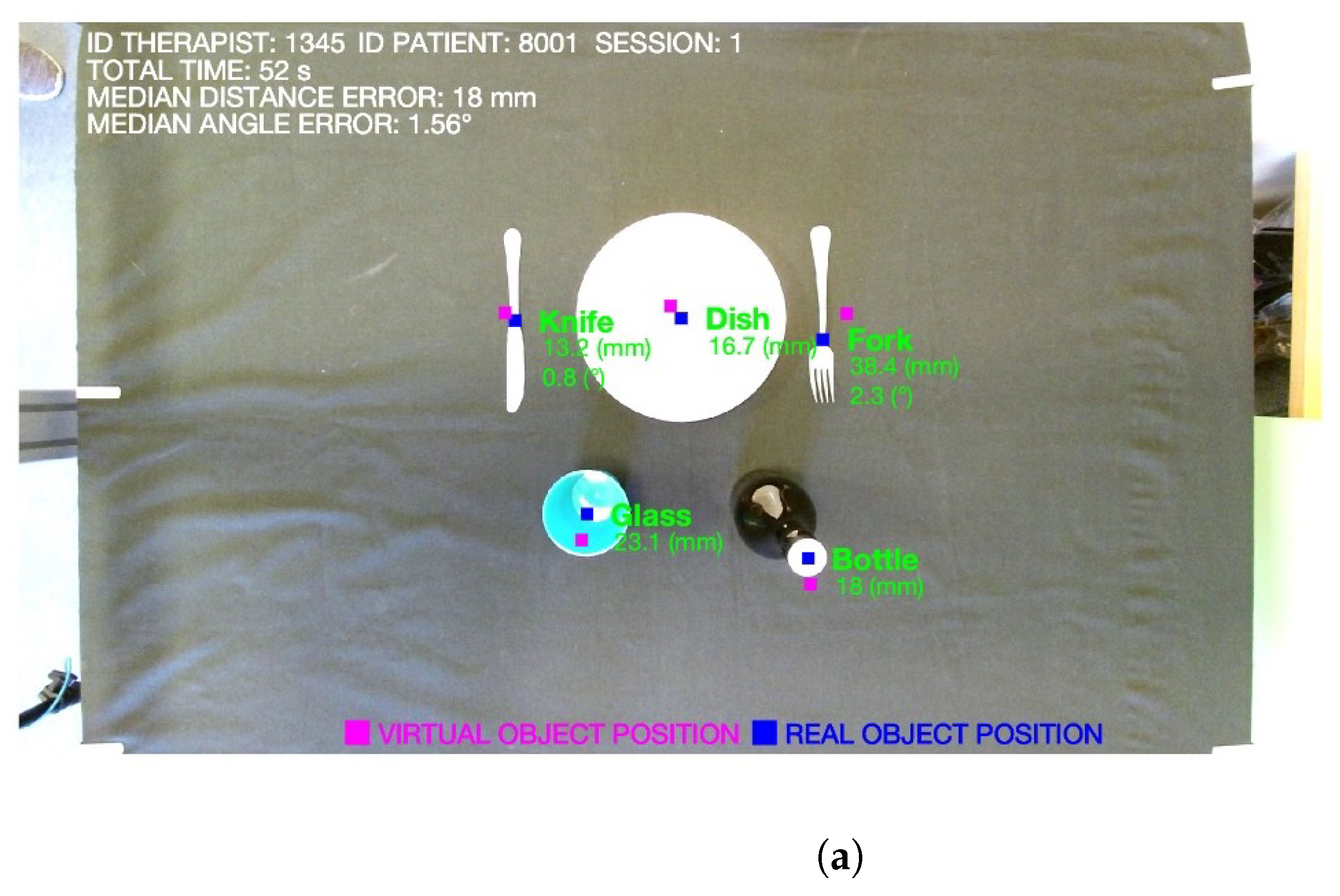
- Once the table setting is completed, the patient is asked to move his hands away from the table to avoid hiding real objects from the camera’s view. Then, by pressing a button on the smartphone, the therapist estimates how far the real objects are from the virtual ones based on the position and angle errors that appear in AR next to each object with numbers following the therapist’s gaze in Figure 6a. Numbers are displayed in different colors (green-yellow-red) according to the tolerance and, therefore, the threshold of error acceptability set by the therapist. If the algorithm does not find a match between a real object and a virtual object because, for example, the patient forgot to add the corresponding real object above the table, the associated virtual object is completely colored red. This indicates that the patient made an error with this virtual object; it is then up to the therapist to assess what kind of error because the algorithm could not return an output.
- (4)
- Another panel in AR summarizes the average angles and the average distances between the barycenters of the virtual and real models with the total task execution time, shown in Figure 6b.
- (5)
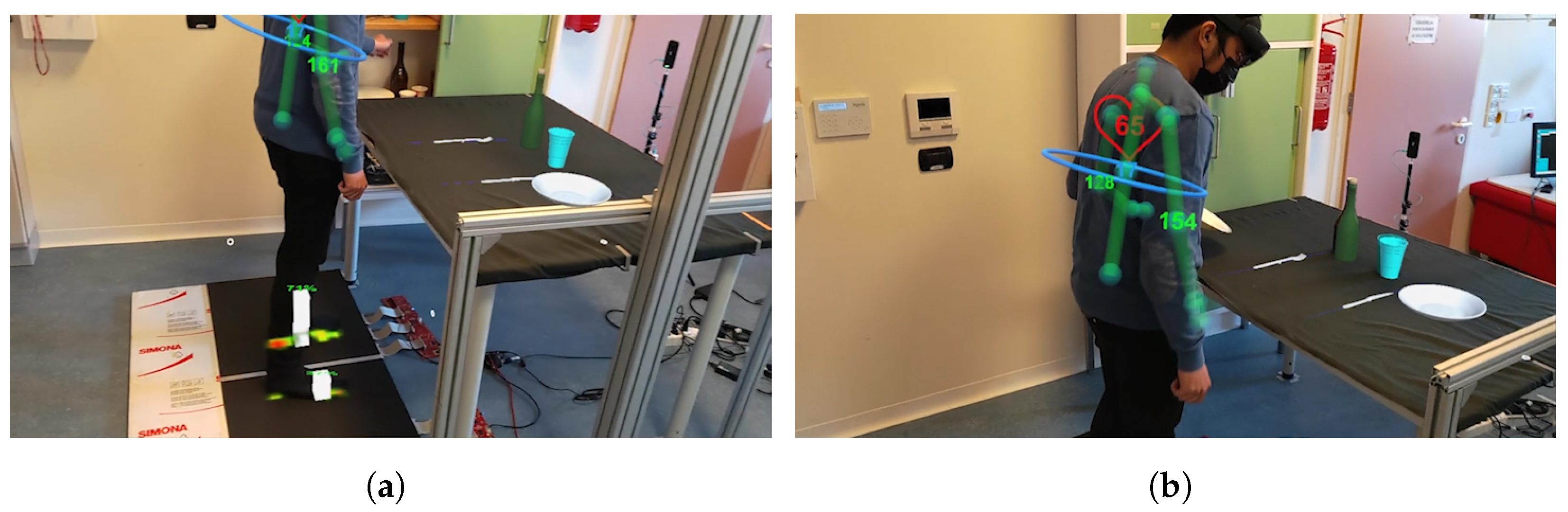
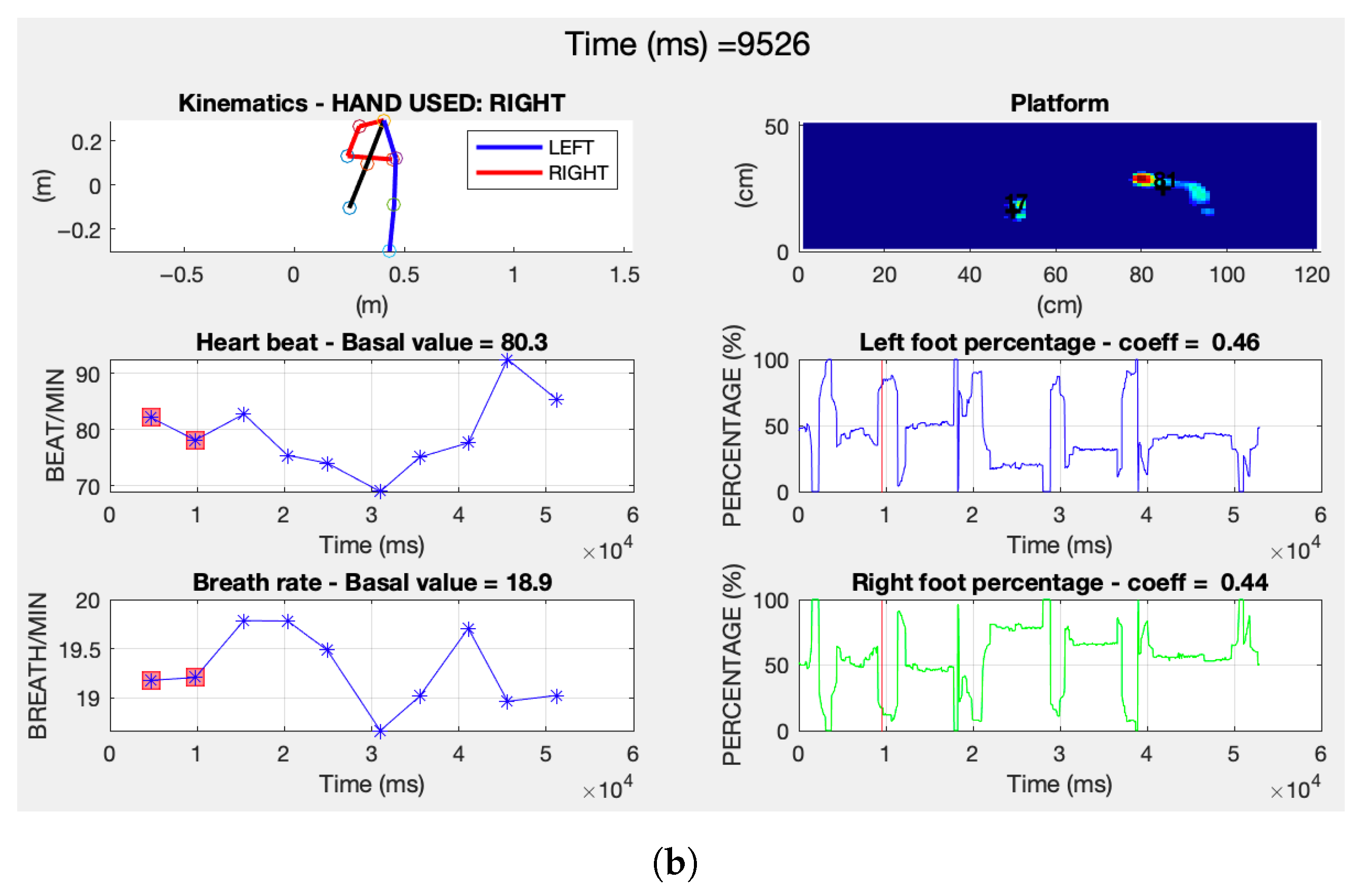
- Therapists can decide with a smartphone whether to display additional information about the patient in AR during the exercise session, such as the reconstruction of the patient’s kinematics and angles between the limbs, the load distribution of the legs, and his physiological parameters (Figure 7).
- (6)
- At the end of each session, the therapist can decide to save all captured data to a text file.
5. Algorithm for Object Segmentation, Localization & Identification
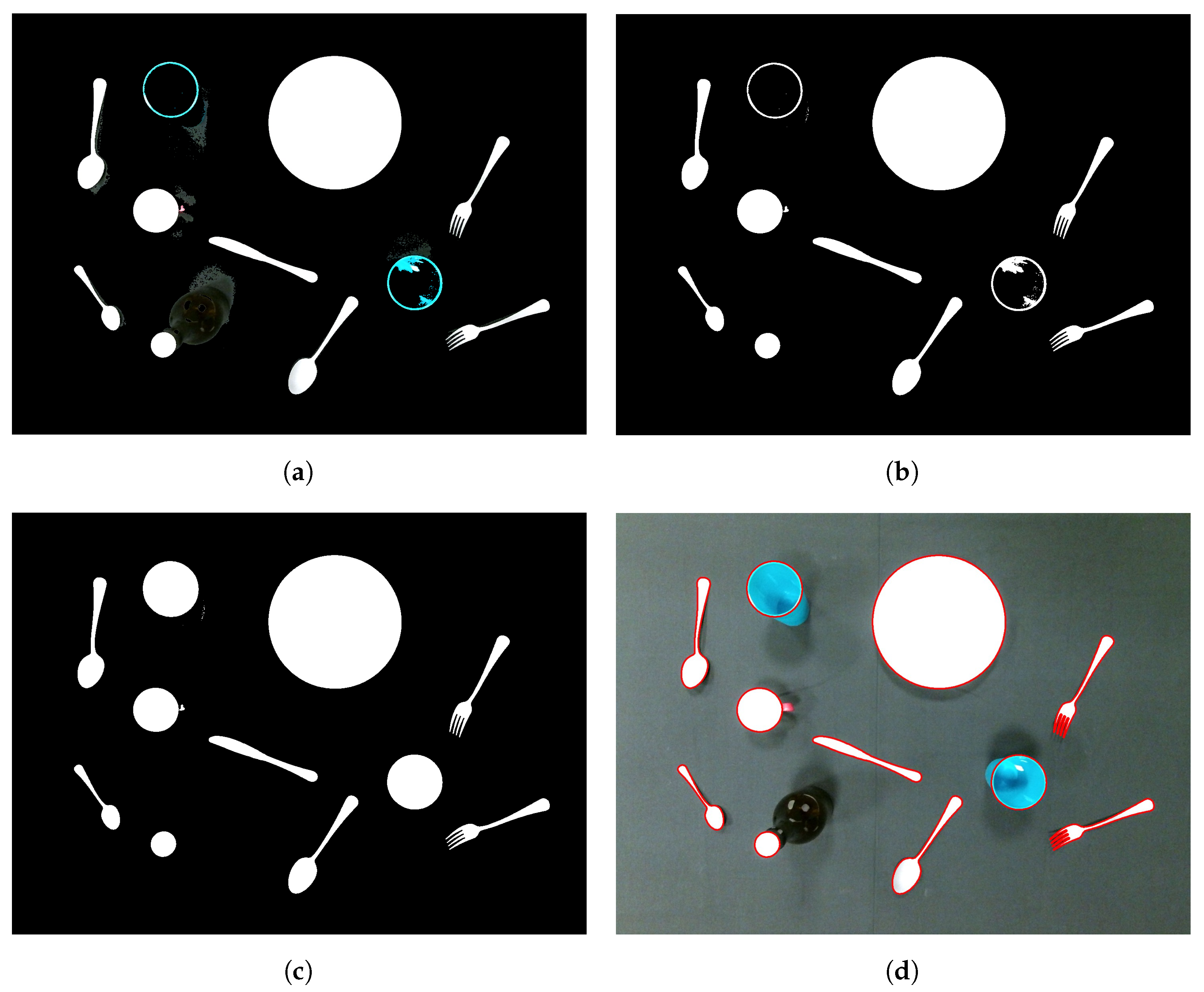
5.1. Segmentation and Localization
- (1)
- Using a Kinect, grayscale images were acquired of the empty table and the same table covered with real objects.
- (2)
- Images were cropped to take into account only the table region of interest (ROI).
- (3)
- Each pixel was subtracted from the two previous images following background subtraction, and a threshold was selected to convert the result to a binary image.
- (4)
- (5)
- (6)
- A boundary label was applied to the filtered image [24].
- (7)
- Noise was removed by applying a threshold on the minimum number of pixels over the area of each labeled object.
- (8)
- (9)
- Objects were localized by taking the mean of their boundary coordinates and by rotating them using Singular Value Decomposition (SVD).
- (10)
- In the end, a mask with each object-centered and aligned was stored.
5.2. Identification
6. Metric Calibration of the Working Table
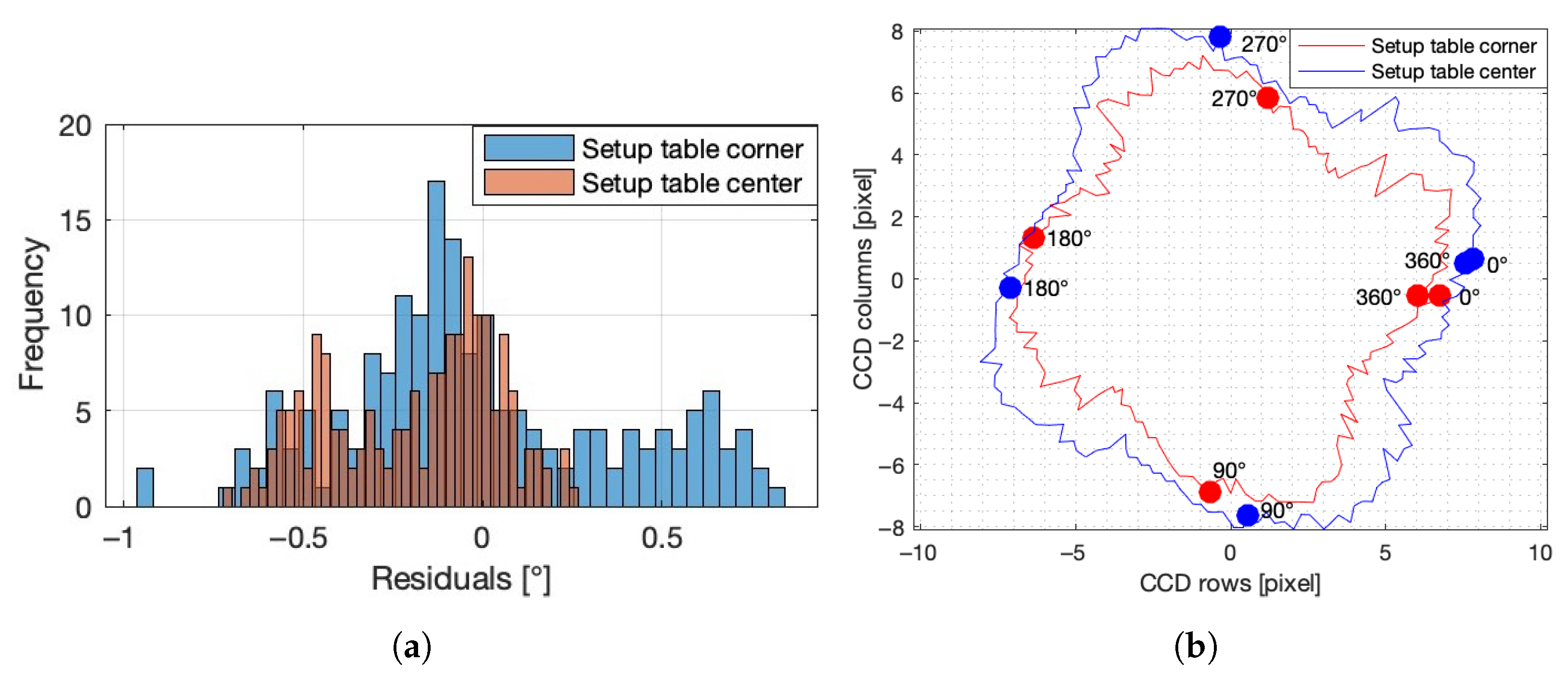
6.1. Camera Calibration
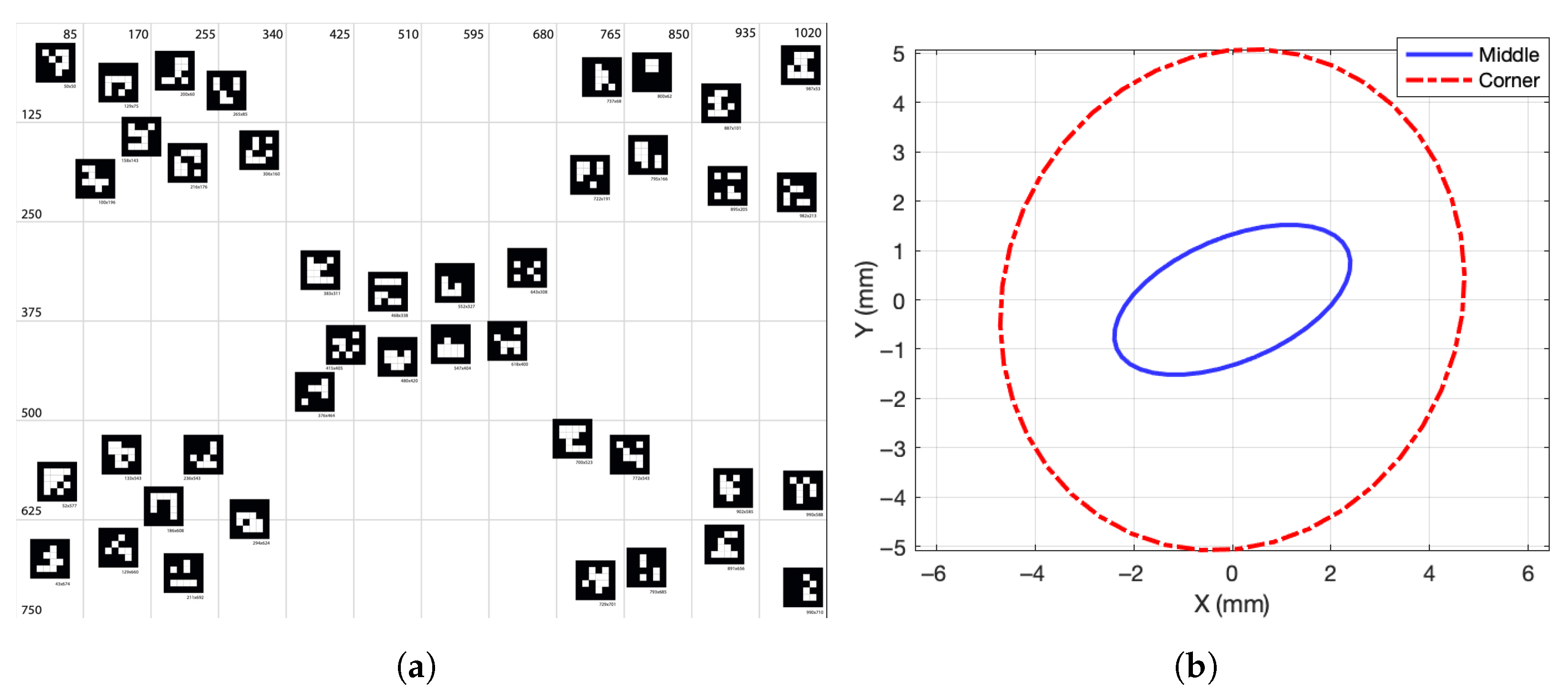
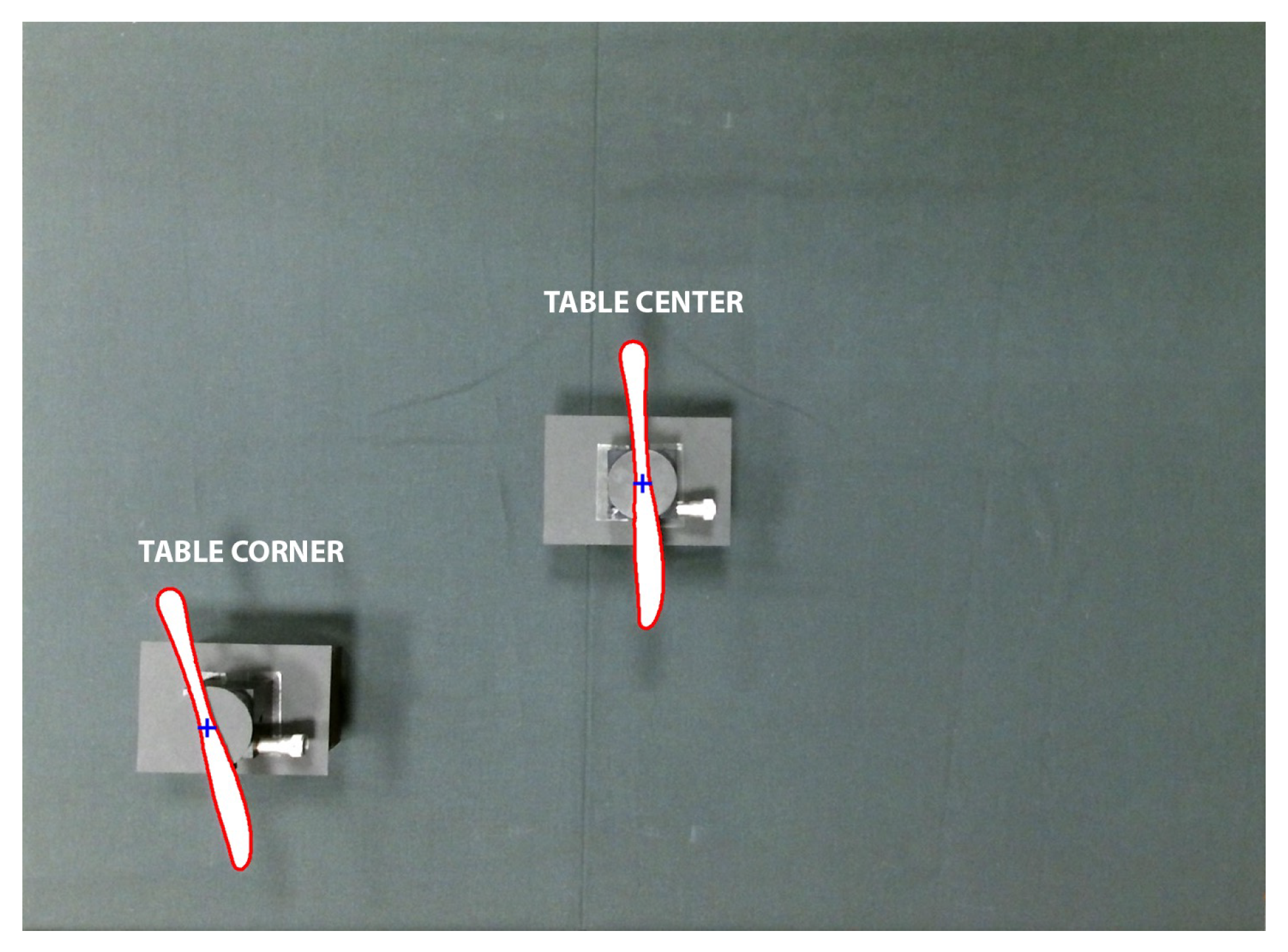
6.2. Accuracy in the Image-Pattern-Recognition Tool
6.3. Algorithm Accuracy for Object Segmentation, Localization & Identification
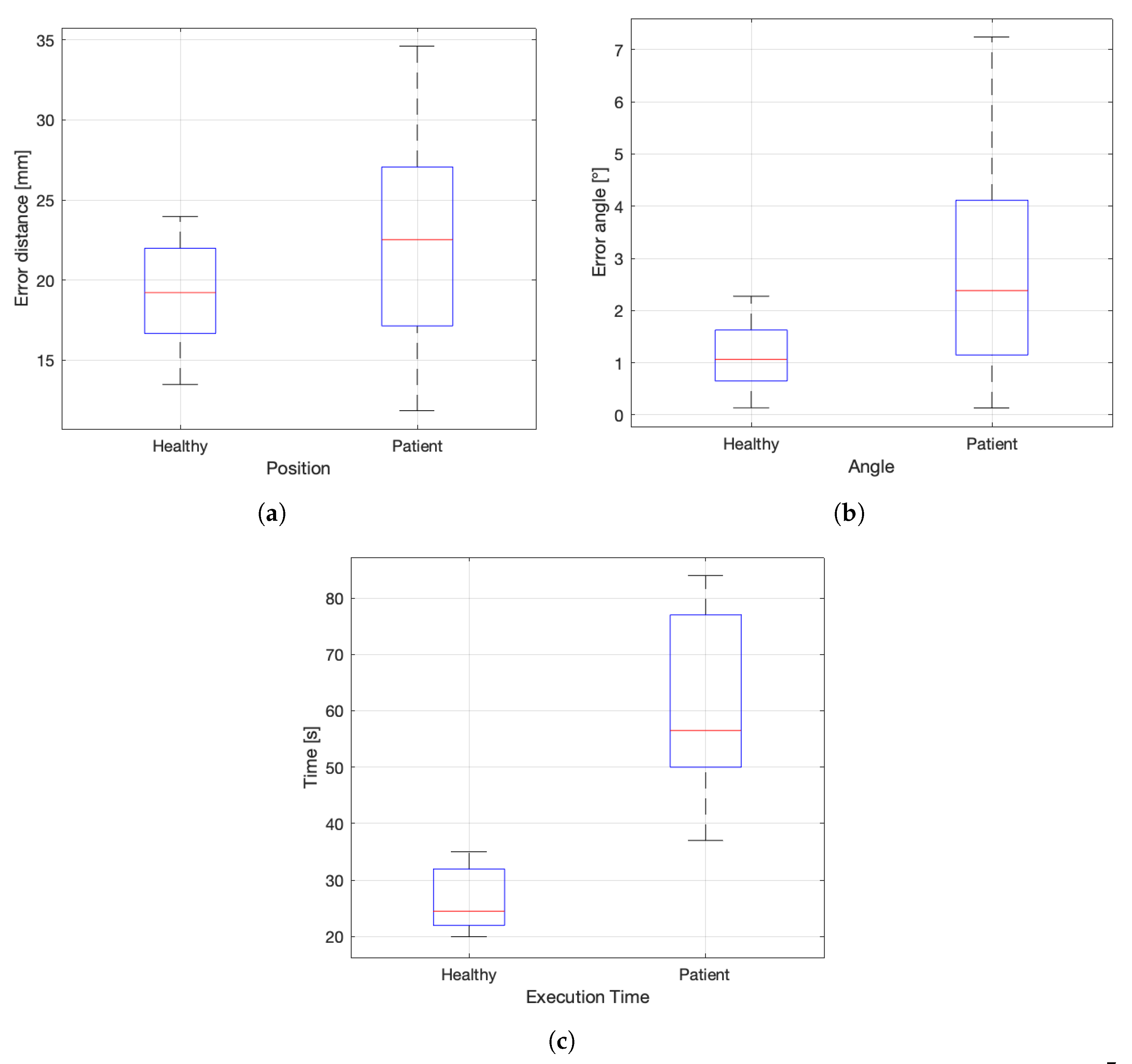
7. User Study
- errors in object placement;
- execution time;
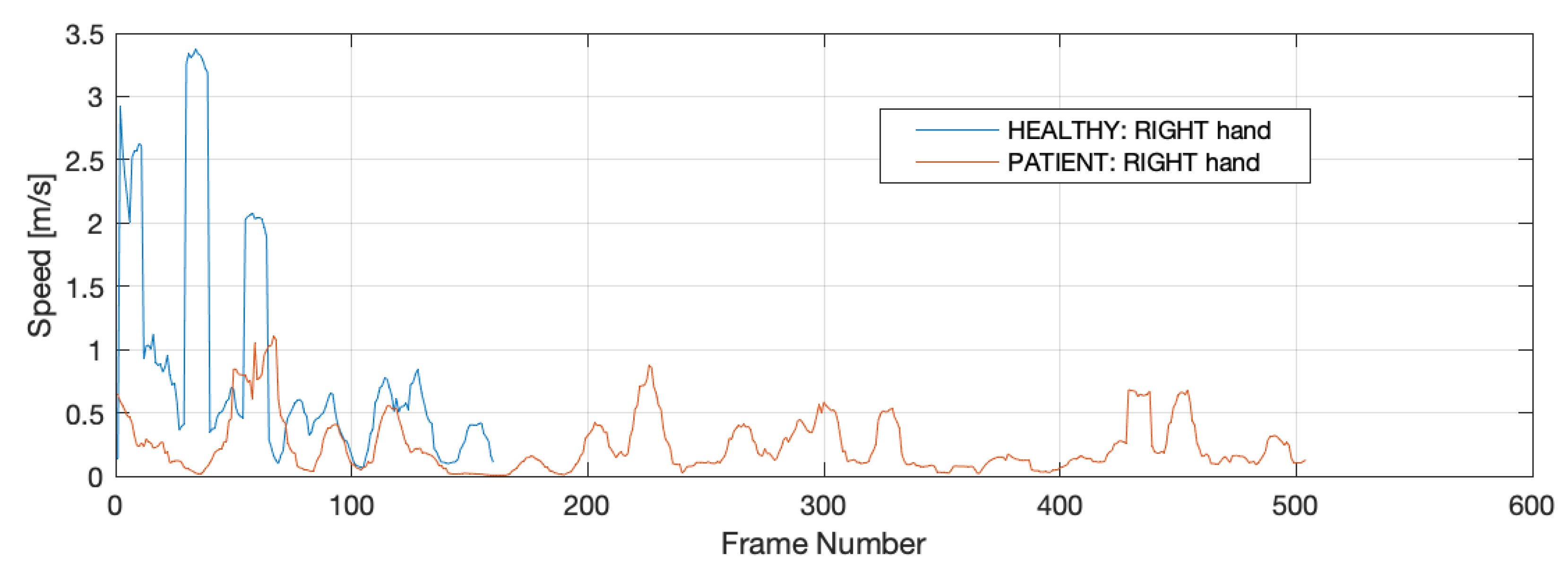
- hand speed;
- breath rate;
- heart beat;
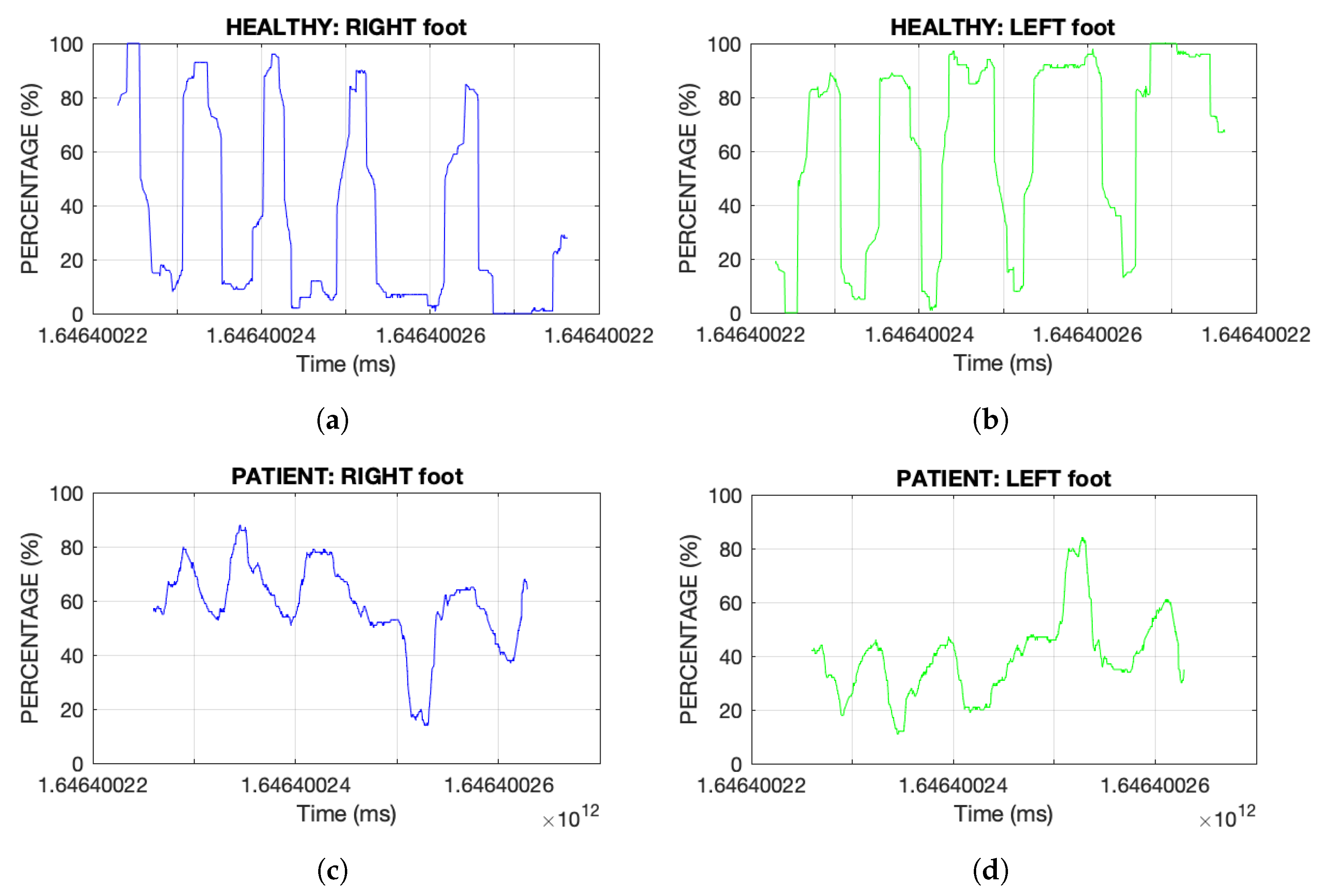
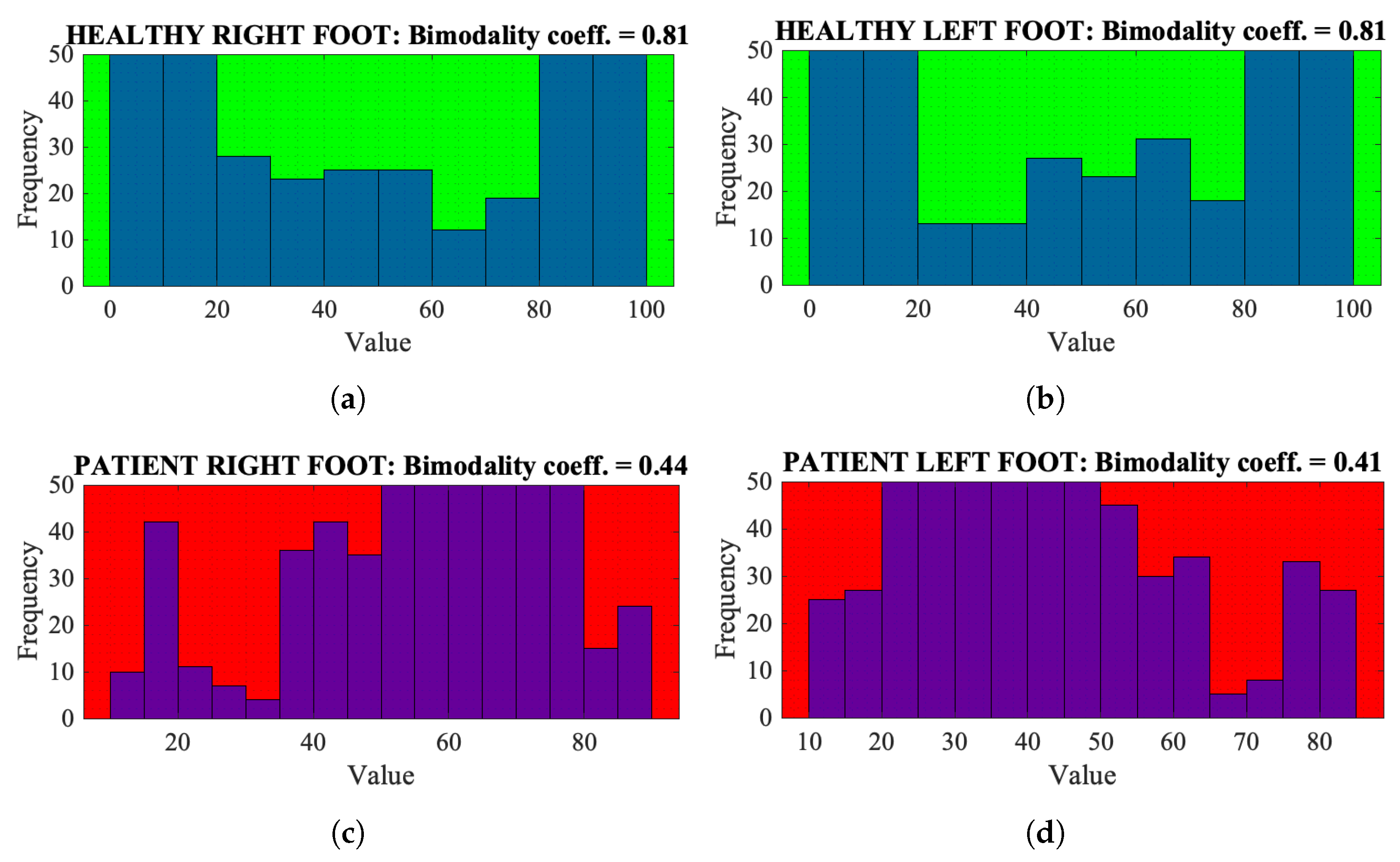
- pressure distribution.
- User 1, C5 incomplete tetraplegia, the major deficit in the left hand.
- User 2, cerebellar ataxia, balance, and stability problems.
- User 3, tetraparesis from Guillain–Barré outcomes, upper limb manipulation deficit.
- (1)
- After completing a consent form, the tester receives an initial explanation of the task.
- (2)
- Before starting, basal values of physiological data, such as heartbeat and breath rate, were estimated by acquiring data for 5 min.
- (3)
- The therapist starts the tests in sequence: each tester must set the table in any configuration provided by the therapist.
8. Offline Interface
9. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Ethical Statement
References
- Luchetti, A.; Tomasin, P.; Fornaser, A.; Tallarico, P.; Bosetti, P.; De Cecco, M. The Human Being at the Center of Smart Factories Thanks to Augmented Reality. In Proceedings of the 2019 IEEE 5th International Forum on Research and Technology for Society and Industry (RTSI), Florence, Italy, 9–12 September 2019; pp. 51–56. [Google Scholar]
- Butaslac, I., III; Luchetti, A.; Parolin, E.; Fujimoto, Y.; Kanbara, M.; Cecco, M.D.; Kato, H. The Feasibility of Augmented Reality as a Support Tool for Motor Rehabilitation. In Proceedings of the International Conference on Augmented Reality, Virtual Reality and Computer Graphics, Lecce, Italy, 7–10 September 2020; Springer: Cham, Switzerland, 2020; pp. 165–173. [Google Scholar]
- Luchetti, A.; Parolin, E.; Butaslac, I.; Fujimoto, Y.; Kanbara, M.; Bosetti, P.; De Cecco, M.; Kato, H. Stepping over Obstacles with Augmented Reality based on Visual Exproprioception. In Proceedings of the 2020 IEEE International Symposium on Mixed and Augmented Reality Adjunct (ISMAR-Adjunct), Recife, Brazil, 9–13 November 2020; pp. 96–101. [Google Scholar]
- Katz, S. Assessing self-maintenance: Activities of daily living, mobility, and instrumental activities of daily living. J. Am. Geriatr. Soc. 1983, 31, 721–727. [Google Scholar] [CrossRef] [PubMed]
- Fisher, A.G.; Marterella, A. Powerful Practice: A Model for Authentic Occupational Therapy; CIOTS-Center for Innovative OT Solutions: Fort Collins, CO, USA, 2019. [Google Scholar]
- Chard, G. An investigation into the use of the Assessment of Motor and Process Skills (AMPS) in clinical practice. Br. J. Occup. Ther. 2000, 63, 481–488. [Google Scholar] [CrossRef]
- Rohrbach, N.; Gulde, P.; Armstrong, A.R.; Hartig, L.; Abdelrazeq, A.; Schröder, S.; Neuse, J.; Grimmer, T.; Diehl-Schmid, J.; Hermsdörfer, J. An augmented reality approach for ADL support in Alzheimer’s disease: A crossover trial. J. Neuroeng. Rehabil. 2019, 16, 66. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wolf, D.; Besserer, D.; Sejunaite, K.; Riepe, M.; Rukzio, E. Care: An augmented reality support system for dementia patients. In Proceedings of the 31st Annual ACM Symposium on User Interface Software and Technology Adjunct Proceedings, Berlin, Germany, 14–17 October 2018; pp. 42–44. [Google Scholar]
- Nakamura, Y.; Yamamoto, S.; Tamai, M.; Yasumoto, K. Supporting daily living activities using behavior logs and Augmented Reality. In Proceedings of the 2013 IEEE International Conference on Pervasive Computing and Communications Workshops (PERCOM Workshops), San Diego, CA, USA, 18–22 March 2013; pp. 658–663. [Google Scholar]
- Khademi, M.; Hondori, H.M.; Dodakian, L.; Cramer, S.; Lopes, C.V. Comparing “pick and place” task in spatial augmented reality versus non-immersive virtual reality for rehabilitation setting. In Proceedings of the 2013 35th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Osaka, Japan, 3–7 July 2013; pp. 4613–4616. [Google Scholar]
- De Cecco, M.; Fornaser, A.; Tomasin, P.; Zanetti, M.; Guandalini, G.; Ianes, P.G.; Pilla, F.; Nollo, G.; Valente, M.; Pisoni, T. Augmented reality to enhance the clinician’s observation during assessment of daily living activities. In Proceedings of the International Conference on Augmented Reality, Virtual Reality and Computer Graphics, Ugento, Italy, 12–15 June 2017; Springer: Cham, Switzerland, 2017; pp. 3–21. [Google Scholar]
- Piumsomboon, T.; Lee, Y.; Lee, G.A.; Dey, A.; Billinghurst, M. Empathic mixed reality: Sharing what you feel and interacting with what you see. In Proceedings of the 2017 International Symposium on Ubiquitous Virtual Reality (ISUVR), Nara, Japan, 27–29 June 2017; pp. 38–41. [Google Scholar]
- Oyeleke, R.O.; Yu, C.-Y.; Chang, C.K. Situ-Centric Reinforcement Learning for Recommendation of Tasks in Activities of Daily Living In Smart Homes. In Proceedings of the IEEE 42nd Annual Computer Software and Applications Conference, Tokyo, Japan, 23–27 July 2018. [Google Scholar]
- Ohiwa, T.; Yamamoto, H.; Yamazaki, K. Sensor system to advice health-aware information for elderly people on daily living activities. In Proceedings of the International Conference on Computing, Networking and Communications, Kauai, HI, USA, 15–18 February 2016. [Google Scholar]
- Karakostas, A.; Lazarou, I.; Meditskos, G.; Stavropoulos, T.G.; Kompatsiaris, I.; Tsolaki, M. Supporting Cognitive Skills of People Suffering from Dementia through a Sensor-Based System. In Proceedings of the IEEE 15th International Conference on Advanced Learning Technologies, Hualien, Taiwan, 6–9 July 2015. [Google Scholar]
- Hall, A.M.; Ferreira, P.H.; Maher, C.G.; Latimer, J.; Ferreira, M.L. The influence of the therapist-patient relationship on treatment outcome in physical rehabilitation: A systematic review. Phys. Ther. 2010, 90, 1099–1110. [Google Scholar] [CrossRef] [PubMed]
- Peitso, L.E.; Michael, J.B. The promise of interactive shared augmented reality. Computer 2020, 53, 45–52. [Google Scholar] [CrossRef]
- Kiyokawa, K.; Takemura, H.; Yokoya, N. A collaboration support technique by integrating a shared virtual reality and a shared augmented reality. In Proceedings of the IEEE SMC’99 Conference Proceedings. 1999 IEEE International Conference on Systems, Man, and Cybernetics (Cat. No. 99CH37028), Tokyo, Japan, 12–15 October 1999; Volume 6, pp. 48–53. [Google Scholar]
- Qiu, S.; Liu, H.; Zhang, Z.; Zhu, Y.; Zhu, S.C. Human-robot interaction in a shared augmented reality workspace. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 25–29 October 2020; pp. 11413–11418. [Google Scholar]
- Grisenti, A.; Nollo, G.; Dalprá, M.; Natale, F.D.; Cecco, M.D.; Francesconi, A.; Fornaser, A.; Tomasin, P.; Garau, N.; Guandalini, L.; et al. Technological Infrastructure Supports New Paradigm of Care for Healthy Aging: The Living Lab Ausilia. In Italian Forum of Ambient Assisted Living; Springer: Cham, Switzerland, 2019; pp. 85–99. [Google Scholar]
- Otte, K.; Kayser, B.; Mansow-Model, S.; Verrel, J.; Paul, F.; Brandt, A.U.; Schmitz-Hübsch, T. Accuracy and reliability of the kinect version 2 for clinical measurement of motor function. PLoS ONE 2016, 11, e0166532. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pan, J.; Tompkins, W.J. A real-time QRS detection algorithm. IEEE Trans. Biomed. Eng. 1985, BME-32, 230–236. [Google Scholar] [CrossRef] [PubMed]
- Soille, P. Morphological Image Analysis: Principles and Applications; Springer: Berlin/Heidelberg, Germany, 1999; pp. 173–174. [Google Scholar]
- Haralick, R.M.; Shapiro, L.G. Computer and Robot Vision; Addison-Wesley: Washington, DC, USA, 1992; Volume I, pp. 28–48. [Google Scholar]
- Gonzalez, R.C.; Woods, R.E.; Eddins, S.L. Digital Image Processing Using MATLAB; Pearson Prentice Hall: Hoboken, NJ, USA, 2004. [Google Scholar]
- Wang, Z.; Bovik, A.C.; Sheikh, H.R.; Simoncelli, E.P. Image Qualifty Assessment: From Error Visibility to Structural Similarity. IEEE Trans. Image Process. 2004, 13, 600–612. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Garrido-Jurado, S.; Muñoz-Salinas, R.; Madrid-Cuevas, F.J.; Marín-Jiménez, M.J. Automatic generation and detection of highly reliable fiducial markers under occlusion. Pattern Recogn. 2014, 47, 2280–2292. [Google Scholar] [CrossRef]
- Smith, R.C.; Cheeseman, P. On the representation and estimation of spatial uncertainty. Int. J. Robot. Res. 1986, 5, 56–68. [Google Scholar] [CrossRef]
- Pérez-Pachón, L.; Sharma, P.; Brech, H.; Gregory, J.; Lowe, T.; Poyade, M.; Gröning, F. Effect of marker position and size on the registration accuracy of HoloLens in a non-clinical setting with implications for high-precision surgical tasks. Int. J. Comput. Assist. Radiol. Surg. 2021, 16, 955–966. [Google Scholar] [CrossRef] [PubMed]
- Pfister, R.; Schwarz, K.A.; Janczyk, M.; Dale, R.; Freeman, J.B. Good things peak in pairs: A note on the bimodality coefficient. Front. Psychol. 2013, 4, 700. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kim, T.K. T test as a parametric statistic. Korean J. Anesthesiol. 2015, 68, 540–546. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhai, S.; Kong, J.; Ren, X. Speed–accuracy tradeoff in Fitts’ law tasks—On the equivalency of actual and nominal pointing precision. Int. J. Hum. Comput. Stud. 2004, 61, 823–856. [Google Scholar] [CrossRef]




















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
De Cecco, M.; Luchetti, A.; Butaslac, I., III; Pilla, F.; Guandalini, G.M.A.; Bonavita, J.; Mazzucato, M.; Hirokazu, K. Sharing Augmented Reality between a Patient and a Clinician for Assessment and Rehabilitation in Daily Living Activities. Information 2023, 14, 204. https://doi.org/10.3390/info14040204
De Cecco M, Luchetti A, Butaslac I III, Pilla F, Guandalini GMA, Bonavita J, Mazzucato M, Hirokazu K. Sharing Augmented Reality between a Patient and a Clinician for Assessment and Rehabilitation in Daily Living Activities. Information. 2023; 14(4):204. https://doi.org/10.3390/info14040204
Chicago/Turabian StyleDe Cecco, Mariolino, Alessandro Luchetti, Isidro Butaslac, III, Francesco Pilla, Giovanni Maria Achille Guandalini, Jacopo Bonavita, Monica Mazzucato, and Kato Hirokazu. 2023. "Sharing Augmented Reality between a Patient and a Clinician for Assessment and Rehabilitation in Daily Living Activities" Information 14, no. 4: 204. https://doi.org/10.3390/info14040204
APA StyleDe Cecco, M., Luchetti, A., Butaslac, I., III, Pilla, F., Guandalini, G. M. A., Bonavita, J., Mazzucato, M., & Hirokazu, K. (2023). Sharing Augmented Reality between a Patient and a Clinician for Assessment and Rehabilitation in Daily Living Activities. Information, 14(4), 204. https://doi.org/10.3390/info14040204