


Digital Assistant for Arrival Scheduling with Conflict Prevention Capabilities



Abstract
:1. Introduction
2. State of the Art
2.1. Arrival Sequencing and Scheduling Problem
2.2. Conflict Detection and Resolution
3. ACOP Description
- The tool has an intrinsic capability to reduce conflict occurrences already at the sequencing and scheduling level, by employing the DTW distance concept;
- The tool also includes a preliminary automatic procedure for generating admissible paths starting from the STAR procedure of any airport;
- Finally, the tool employs reinforcement learning techniques for the CDR process in order to train an agent to detect and resolve conflicts in real-time by learning from past experiences.
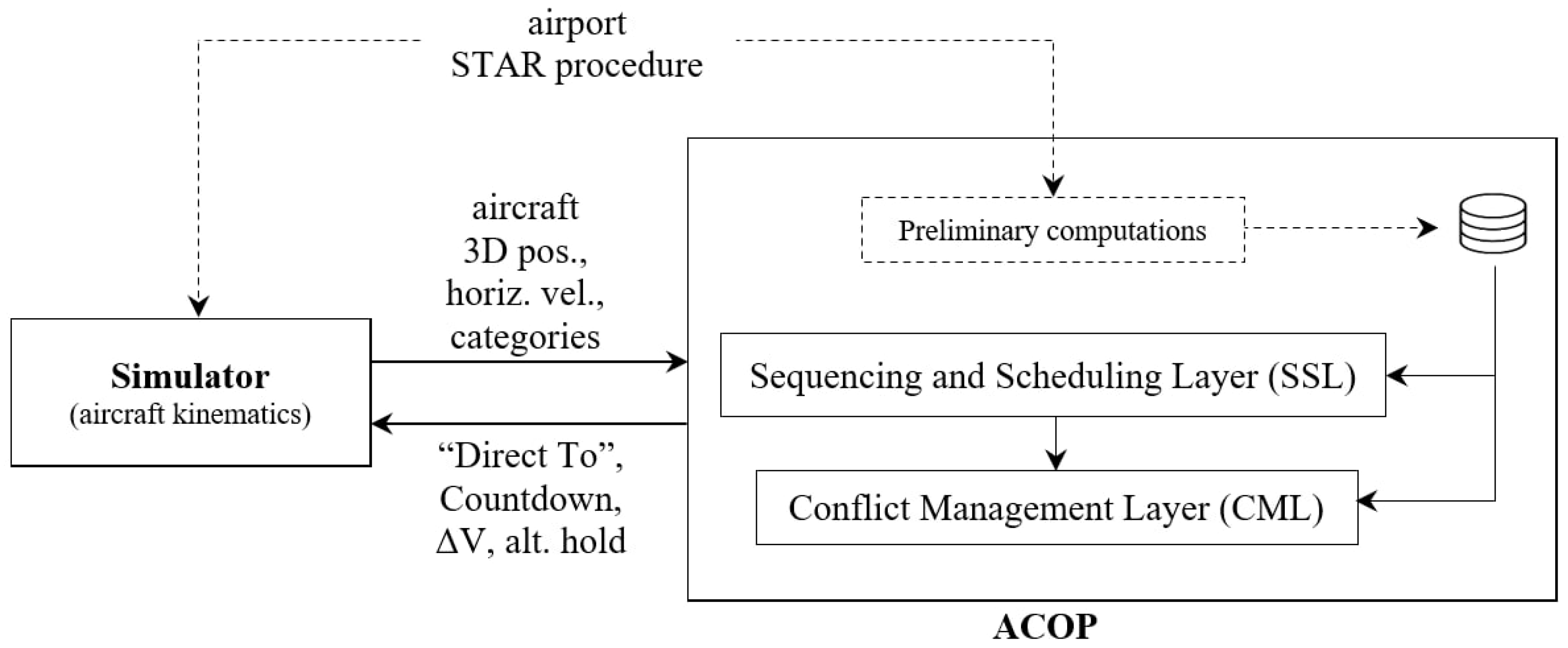
3.1. Functional Architecture
3.2. Design Assumptions and Limitations
- “Direct To” starting points:The starting points of the “Direct To” commands are always the current next waypoints. In other words, an aircraft cannot leave its leg at an intermediate point.
- Operational constraints:Each aircraft cannot be shifted in the landing sequence if this implies a delay at FAF greater than a user-defined value.
- CDR approach:The available conflict resolution actions are only deceleration and levelling (no path stretch or vectoring, for example). The CDR approach is pairwise. However, if two aircraft are both already engaged in conflict resolution maneuvers, their conflict is considered not solvable.
- Speed assumption:The ACOP ASSP solution involves the utilization of average speeds to calculate the ETAs in advance. This design assumption is necessary, and it may potentially result in slightly downgraded outcomes (for details, refer to Section 3.4.1).
- Other limitations:The following factors are not considered by ACOP:
- Previous delay cumulated by aircraft before entering the terminal area;
- Departures;
- Emergencies (for example, due to ground traffic or maintenance, adverse weather conditions, presence of drones, onboard health issues, commercial agreements with some airlines, etc.) that would give a higher priority to some specific aircraft.
3.3. Preliminary Computations
- Flight direction in each leg must be as specified in the STAR procedure;
- Turns on each WP cannot be made with an angle less than 90°.
3.4. Sequencing and Scheduling Layer
3.4.1. Flight Times Minimization
- is the time in which an aircraft arrives in the terminal area, and the optimizer is triggered;
- is the current next waypoint of the j-th aircraft;
- is the current horizontal velocity of the j-th aircraft;
- is the distance from the current position of the j-th aircraft up to ;
- is the distance from up to FAF, computed along the -th path;
- is the average velocity along the -th path, with respect to the allowed values in each leg (note: a different actual speed profile due, for example, to a CR maneuver, might lead to results slightly downgraded).
- and are vectors composed by the computed and nominal ETAs of the -ordered aircraft, respectively;
- represents a function providing the minima spacings for the -ordered aircraft. is reported in Table 1, while is a vector containing the -ordered aircraft categories;
- the operator calculates differences between adjacent elements of its vectorial argument.
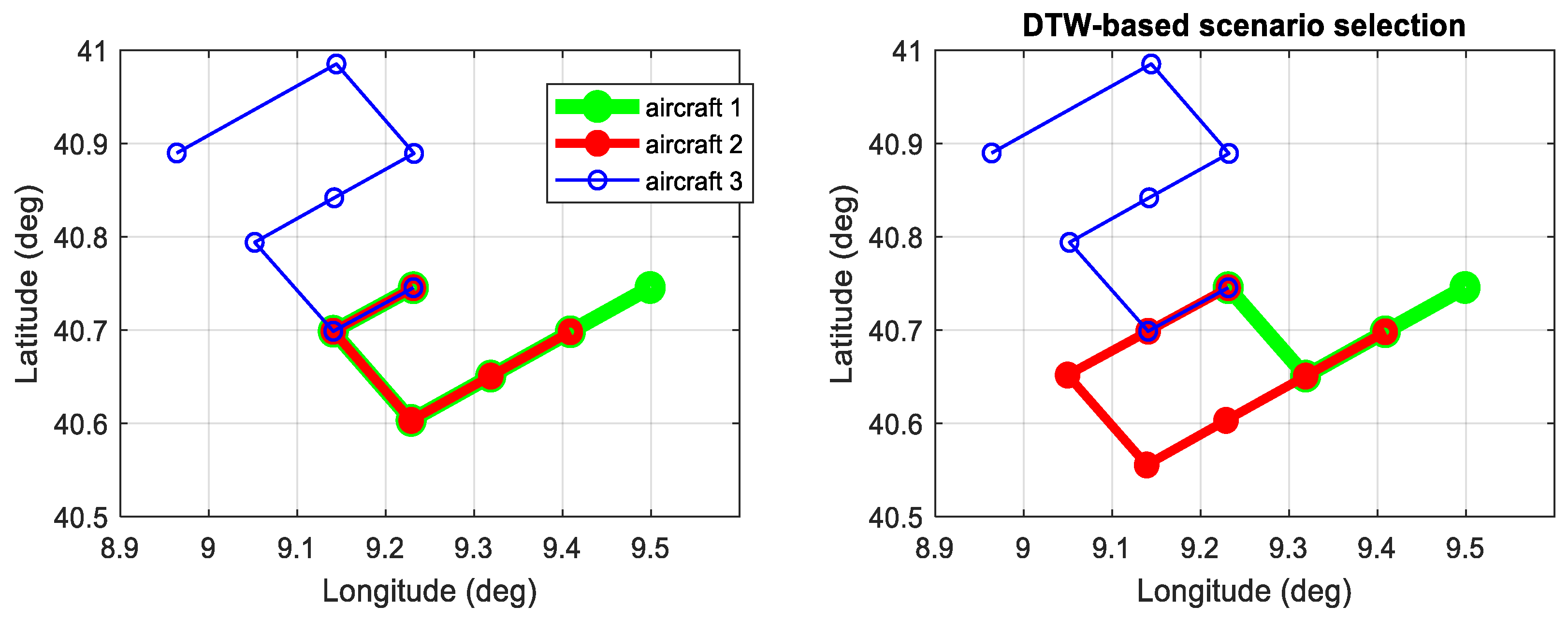
3.4.2. DTW-Based Filtering
3.5. Conflict Management Layer
- Conflict detection between all possible pairs of aircraft and;
- Conflict resolution to separate aircraft by reducing speed and/or holding altitude.
3.5.1. Conflict Detection
3.5.2. Conflict Resolution
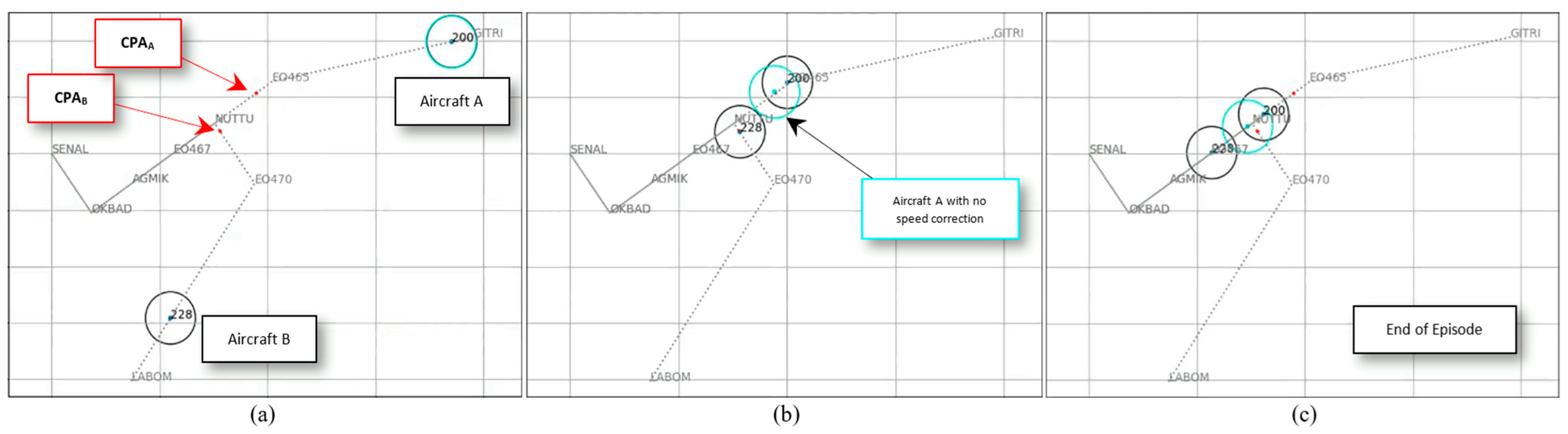
- Immediate speed reduction within the admissible speed range of kts is applied to resolve the conflict. In the presented approach, it is assumed that the controller and pilot tasks are highly automated with minimal latency. However, if an estimation of the average response times and latencies is known, ACOP is capable of considering it in its computations and accounts for possible delays. In Section 5 of this study, we leverage this functionality to analyze the CDR in the context of current operational procedures with respect to different response times settings.
- If there is no feasible speed reduction value within the admissible range, the altitude of the highest aircraft is held until the CPA is reached. More specifically, the holding altitude is set at 1000 feet above the expected conflict altitude. Of course, this maneuver breaks the CDO-like profile if the altitude holding lasts longer than 20 s [12]; however, it is necessary to avoid conflict and maintain safety.
- If there is no speed reduction value capable of solving the detected conflict and the aircraft are only vertically separated (the aircraft are “one above the other”), we combine a predefined deceleration with an altitude holding of the highest airplane.
- Reset the environment:
- ○
- Select two random paths .
- ○
- Generate aircraft and at random positions on the first leg of each path.
- ○
- Assign random initial velocities and between 210 kts and 230 kts.
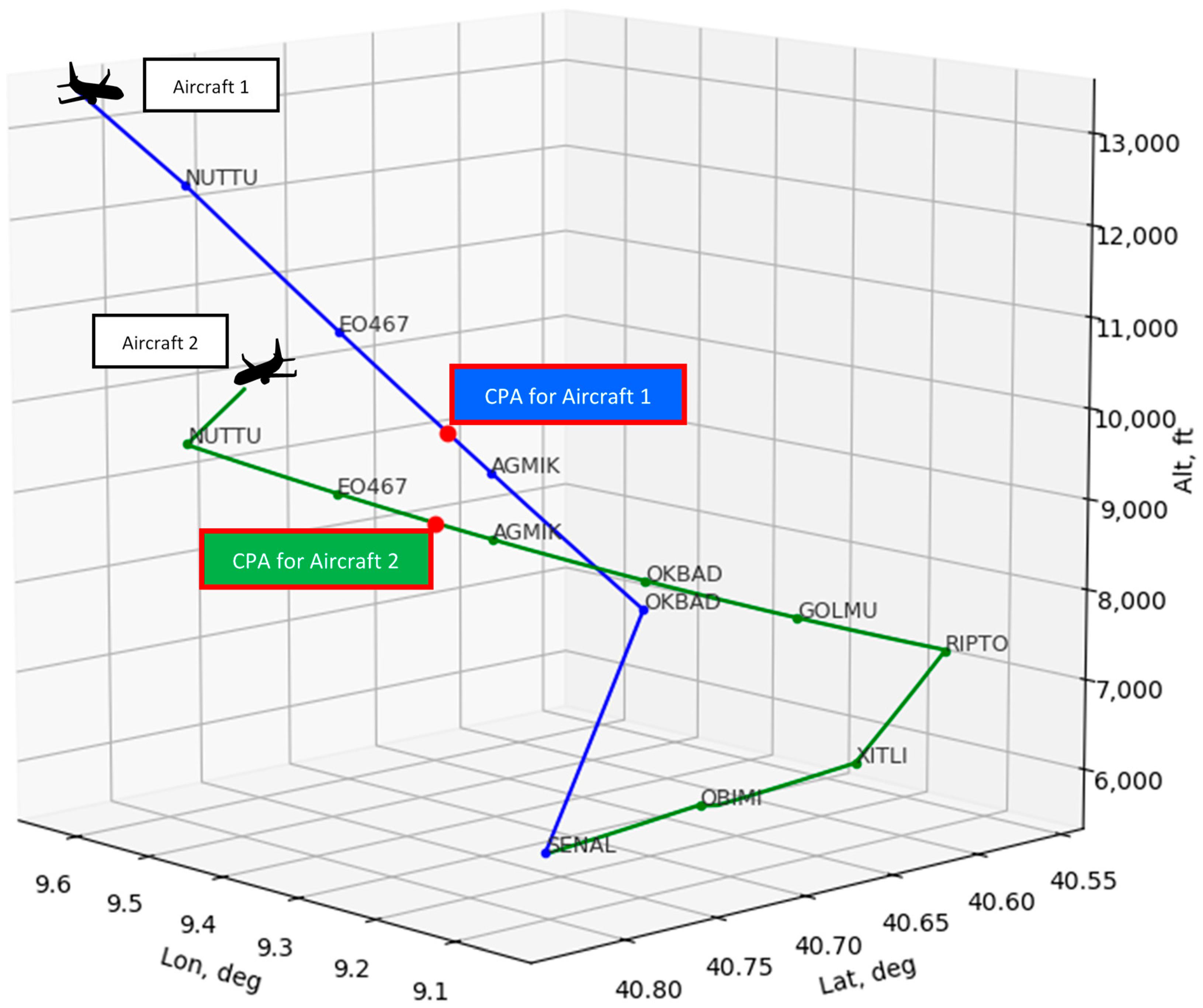
- Calculate CPA and determine , , , .
- Check for potential conflict. If no conflict, skip scenario with probability ε and reset.
- Generate state observation and normalize values to [0, 1].
- Select aircraft to control: choose if otherwise choose .
- Select the action: choose a speed reduction in the integer range [10, 30] kts.
- Apply speed reduction to the selected aircraft.
- Receive reward:
- ○
- If loss of separation,
- ○
- If safe arrival,
4. ACOP Performance Assessment
4.1. ACOP Settings
- The list of waypoints to which the aircraft are assumed non-reschedulable (see Section 3.4.1), as a kind of “frozen horizon” (in our settings, only the planes directly heading to the FAF are considered non-reschedulable);
- The maximum delay on FAF tolerated by each aircraft, with respect to its nominal arrival time (in our settings, it is assumed equal to 15 min for all aircraft);
- The target altitude on FAF for all aircraft (in our settings, it is assumed equal to 5500 ft for all aircraft).
4.2. Reference Strategy
- The historical data do not capture all the significant factors that influence the controller’s actions;
- Given the low traffic volume conditions of LIEO (less than two arriving aircraft per hour), a sequencing strategy is not mandatory, rendering a legitimate comparison with the output of ACOP unmeaningful.
4.3. Simulation Features and Justifications
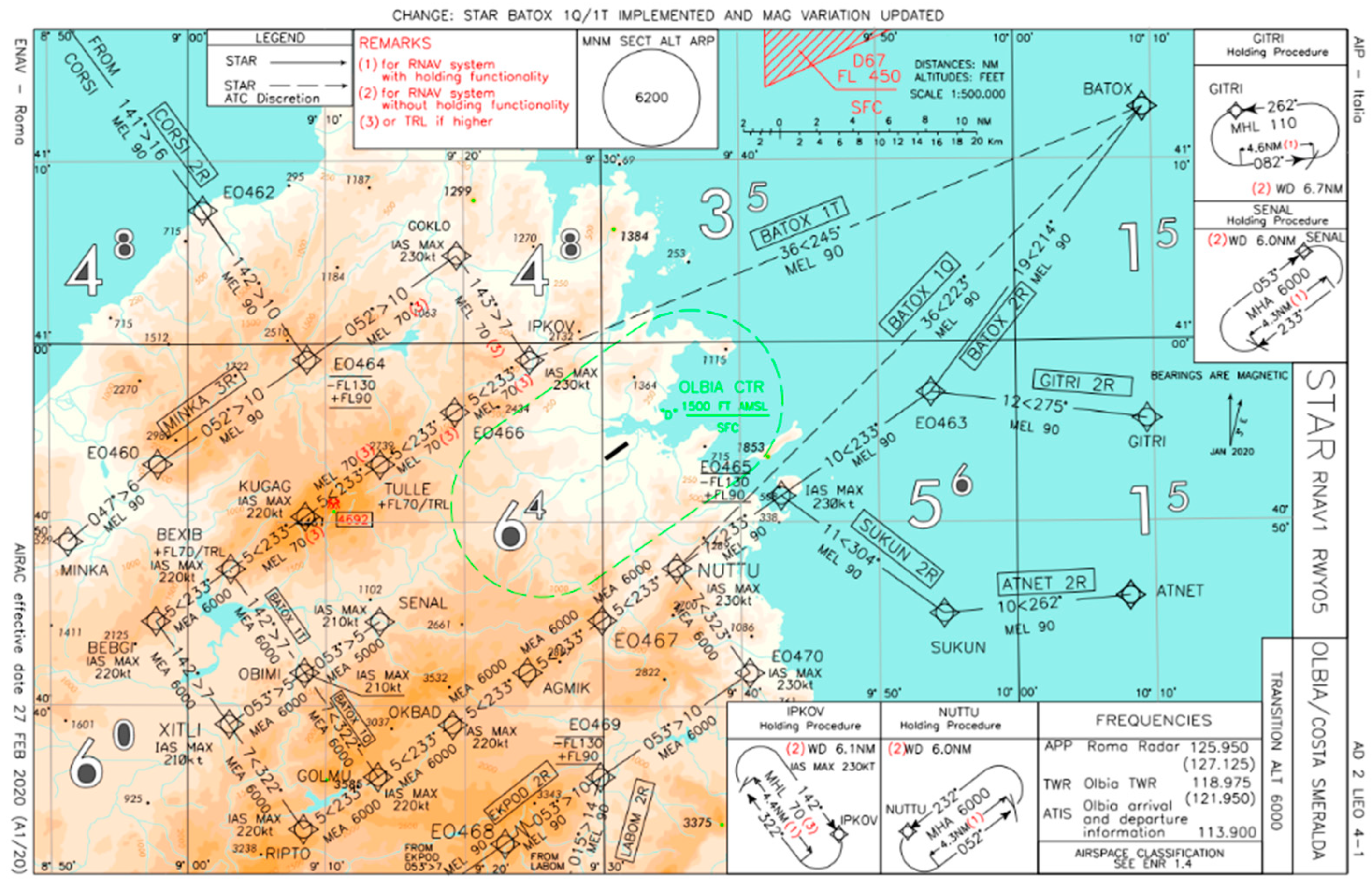
- Olbia Costa Smeralda airport:The assumed STAR procedures are related to the LIEO airport [53]. These procedures are defined within the Sardegna CTA [54]. As seen in Section 3.2 and Section 3.3, some airport data are used for the ACOP design, but actually they are used for the simulation too. In particular, the STAR procedure also provides the upper bounds for altitude and IAS for each leg.
- Aircraft simulation model:The behavior of each aircraft is modeled as a point mass with three translational degrees of freedom. The aircraft minimum approach speed is assumed to be equal to 200 kts. A sample time of one second is adopted.
- No turn dynamics:The aircraft reach waypoints without simulating the turn dynamics.
- Initial paths:The initial paths of all aircraft are the nominal sequences, specified in [53] for each initial fix.
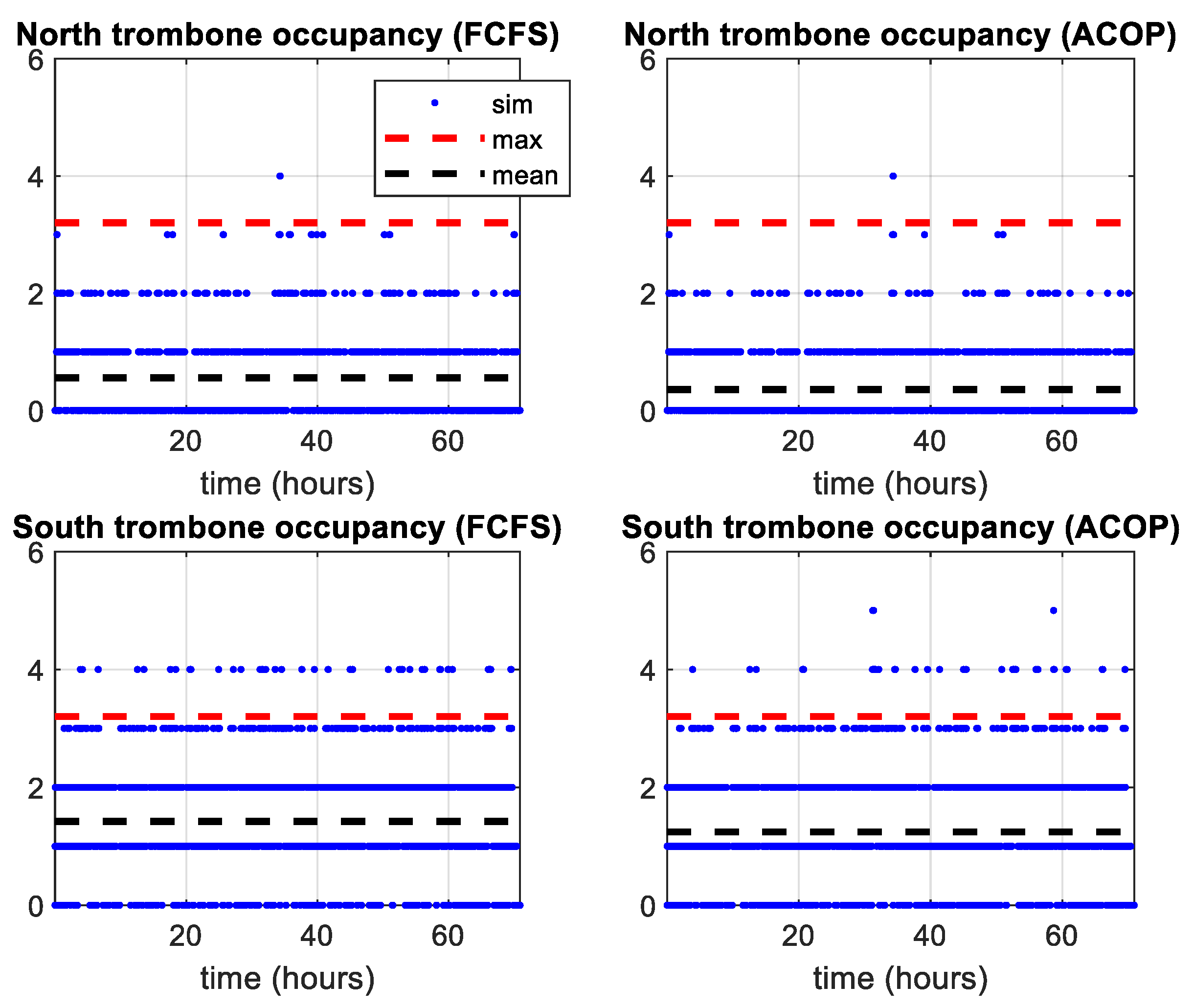
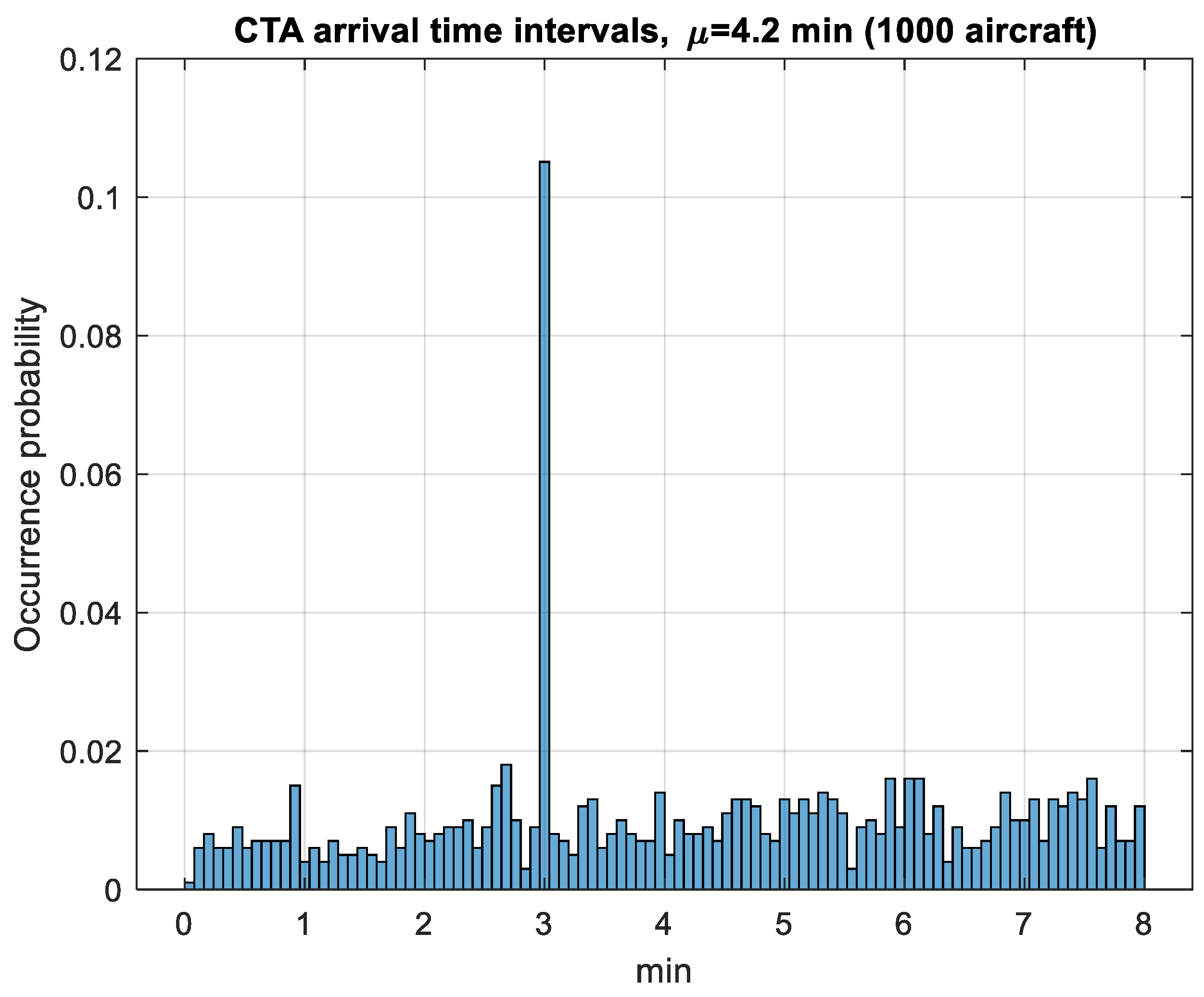
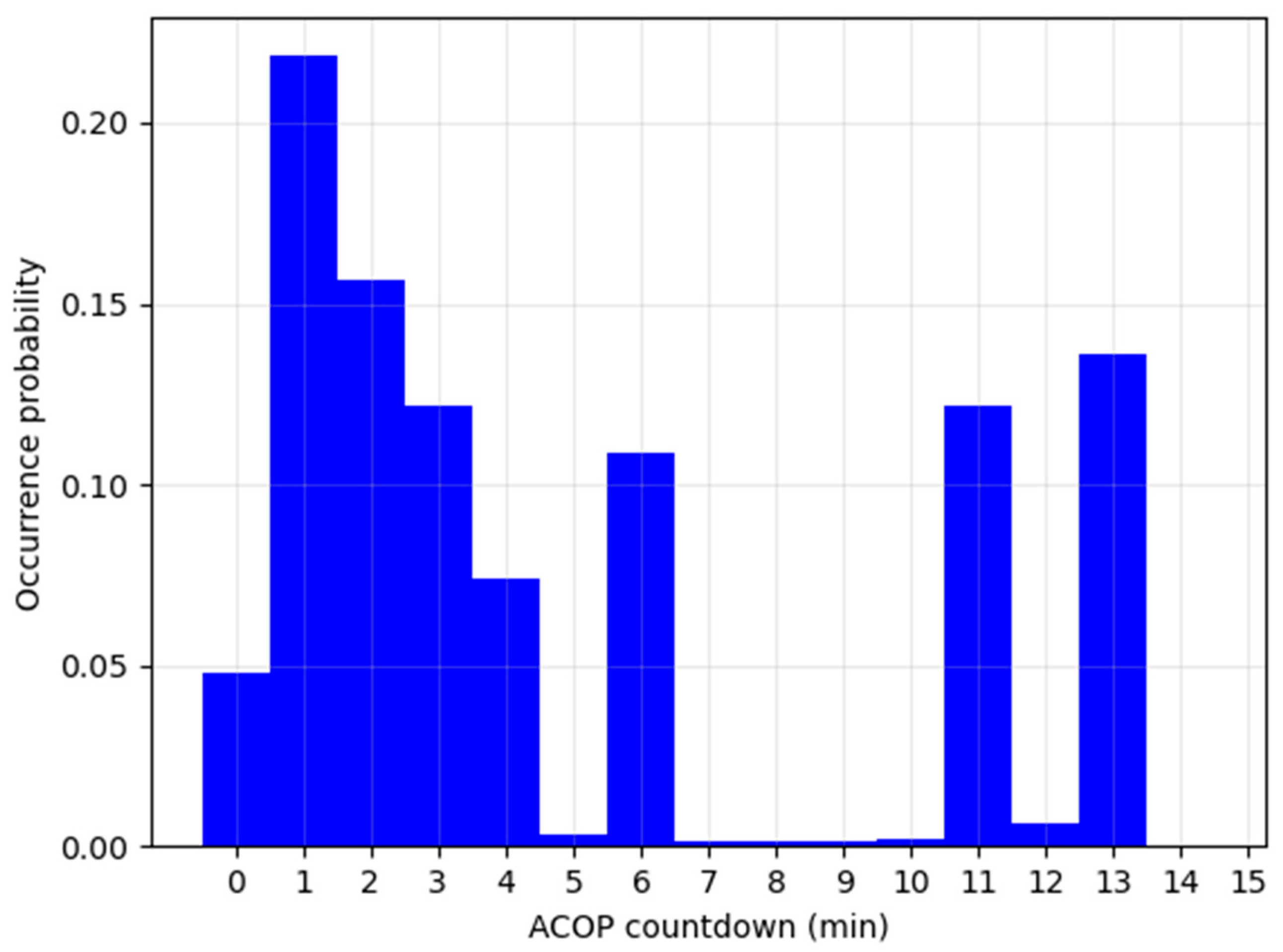
- Traffic level:A rule of thumb for the estimation of the maximum number of the aircraft allowed in the trombone pattern is given by (D + B)/10 = (25 + 7)/10 = 3.2 ≅ 3, being the lengths of the downwind and base legs for LIEO airport equal to D = 25 NM and B = 7 NM, respectively. Of course, this condition is an indirect requirement for the traffic level simulation. In Figure 8, the trombone occupancies are reported for the assumed 1000 aircraft stream. The north and south trombone average occupancies result, respectively, on 0.56 and 1.42 for FCFS and 0.36 and 1.24 for ACOP. The related initial fix arrival times distribution is shown in Figure 9.In more detail, the CTA time intervals are selected uniformly random between 0 and 8 min but, to avoid unrecoverable collisions at the beginning, never less than 3 min for same or adjacent initial fixes (we assume that this condition is ensured by the upstream controller). This is the reason for the peak in Figure 9 in correspondence of this specific value.
- Weather conditions:
- No wind. The zero-wind assumption is adopted by both the simulation and ACOP sides as we aim to isolate and evaluate the functioning of ACOP exclusively. In any case, the trombone geometry is aligned with prevailing wind directions and runway orientation. Therefore, neglecting the wind would result in a constant offset to the velocities of the involved aircraft, with minimal alteration to their relative positions. In addition, speeds received by ACOP are ground speeds. No input information on forecast wind is usually available to the controllers; therefore, the internal ACOP computations are carried out using inertial data only, and the resulting deceleration commands are also with respect to ground. It is worth noting that, even in a real operational environment, a hybrid situation exists where the speed limits on the STAR procedure and the speed considered by pilots are both indicated airspeeds (IAS), while the controller visualizes ground speed. This discrepancy between IAS and inertial speed can result in tracking errors and is a well-known limitation of the current interaction between the controller and aircraft, which is compensated by the controller’s expertise.
- International standard atmosphere [55]. Upon arrival, all aircraft must adopt a common altimeter setting. Specifically, in the case of Olbia airport and many other airports, the QNH setting must be used, which provides all altitudes referenced to the mean sea level (MSL). As a result, the QNH altitudes will not be affected by the current atmospheric pressure. In fact, it is essential to have a common altitude reference for all aircraft to ensure comparable results and to conduct an accurate assessment of ACOP performances. Therefore, the assumption of an international standard atmosphere (ISA) is useful only to homogenize altitudes and flight levels.
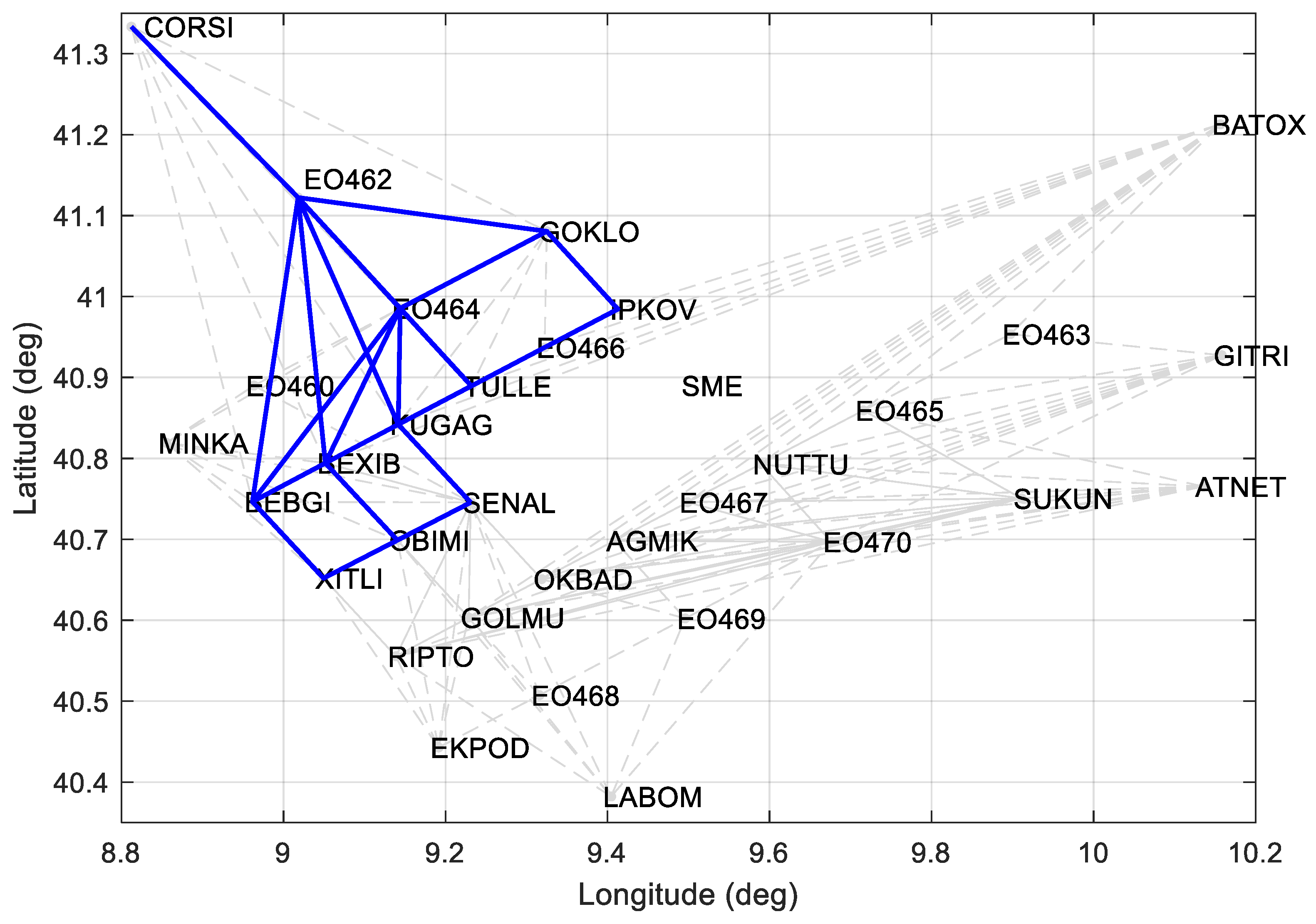
- Flight phase definition:Each aircraft appears on an initial fix with an altitude ranging from 110 to 190 FL with steps of 1000 ft. Then, it will end its flight in correspondence with FAF (SENAL waypoint, see Figure 6), in this way excluding approach and landing from our problem.
- CDO-like profiles:Accurate CDO simulation is out of scope in this work. Our scenarios begin when the aircraft reach the arrival sector, while CDOs are usually established at TOD. We therefore only emulate a continuous descent behavior assuming that the optimal FPA is the one that is determined considering the DTG to the FAF and the relative altitude between the aircraft and the FAF. While usually the resulting FPAs are compatible with typical vertical speeds, the FPA is nonetheless lower saturated to −5°. The descent profile is suspended only if the minimum altitude of the current leg is reached or if a leveling command is issued by ACOP to solve a conflict. Once the minimum altitude constraint is removed (or the conflict is solved), the aircraft recomputes the FPA towards the FAF and continues its descent.
- ACOP inputs:The ACOP inputs are supposed not affected by any measurement error or delay.
- Latency between ACOP outputs and their actuation:The simulation results presented in Section 4.5 are obtained using zero latency. However, in Section 5, non-zero latencies are considered.
4.4. Metrics Definition
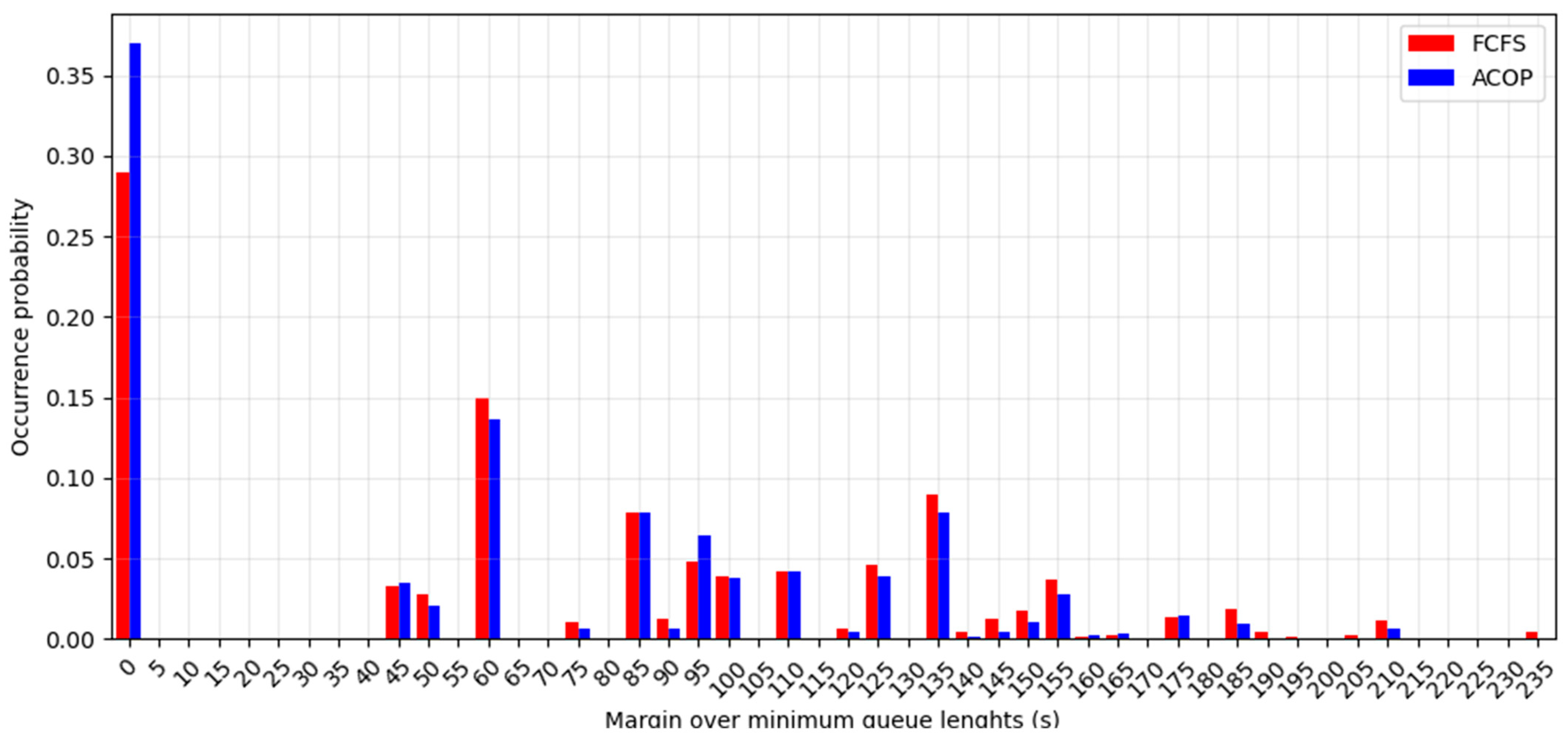
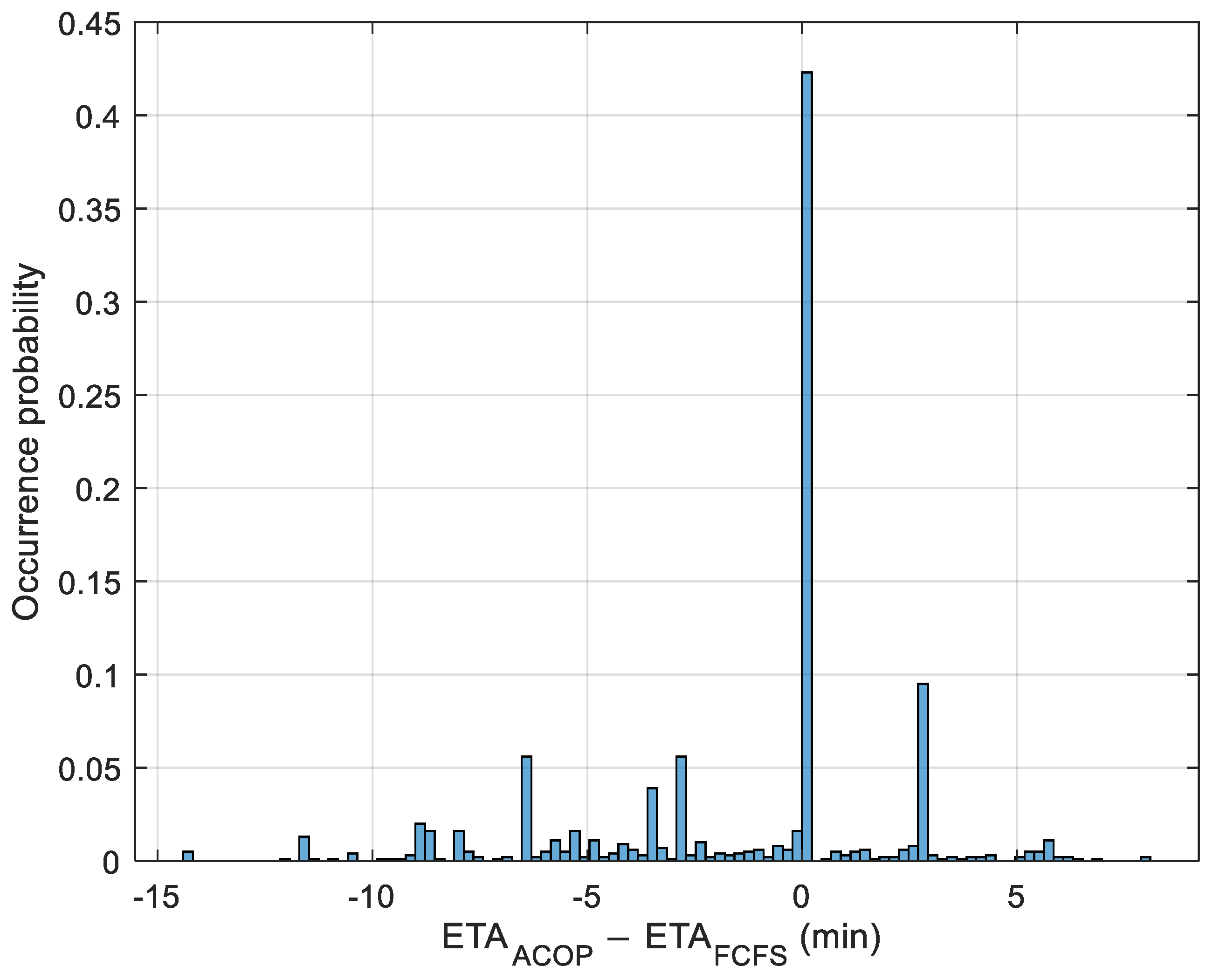
- A performance indicator for the efficiency could be trivially represented by the ACOP objective function, i.e., the sum of the arrival times on FAF (see Section 3.4.1). In Section 4.5.1, flight time reduction for each aircraft due to ACOP SSL will be quantified. It is worth noting that these ETA differences are strongly related to the well-known KPIs about runway capacity and throughput [56]. However, in our simulation environment, the improvements of capacity and throughput cannot be immediately appreciated because the CTA arrival frequency is kept fixed, regardless of the downstream management.
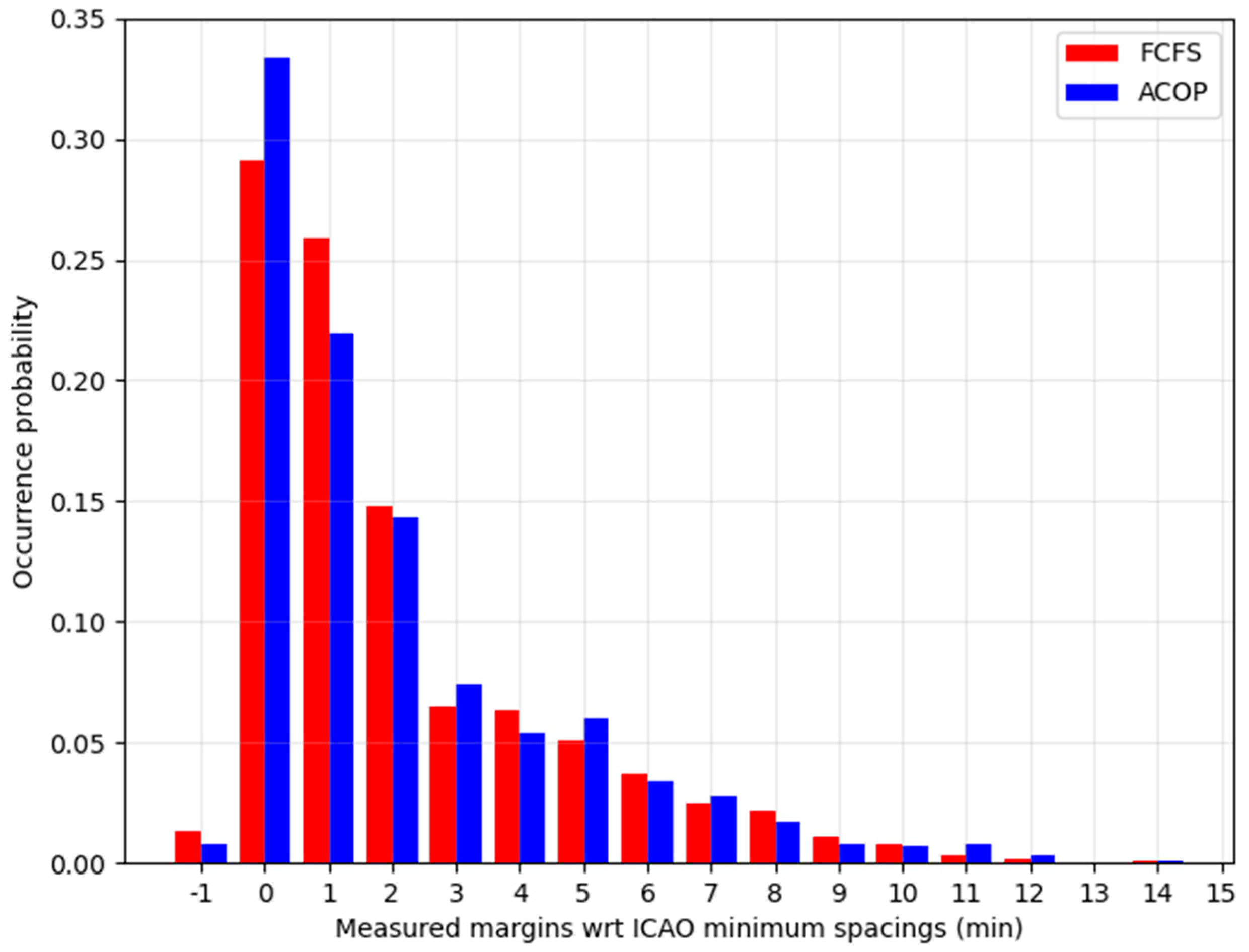
- The predictability is defined as the percentage of the aircraft arriving on FAF with a time difference not greater than ±15 min with respect to the nominal ETAs [56]. It is clear that this indicator penalizes both too early and too late aircraft. This metric will be verified in Section 4.5.1.
- Regarding the safety aspects, usually the main indicator is the number of LOSs, and it will be evaluated in Section 4.5.2.
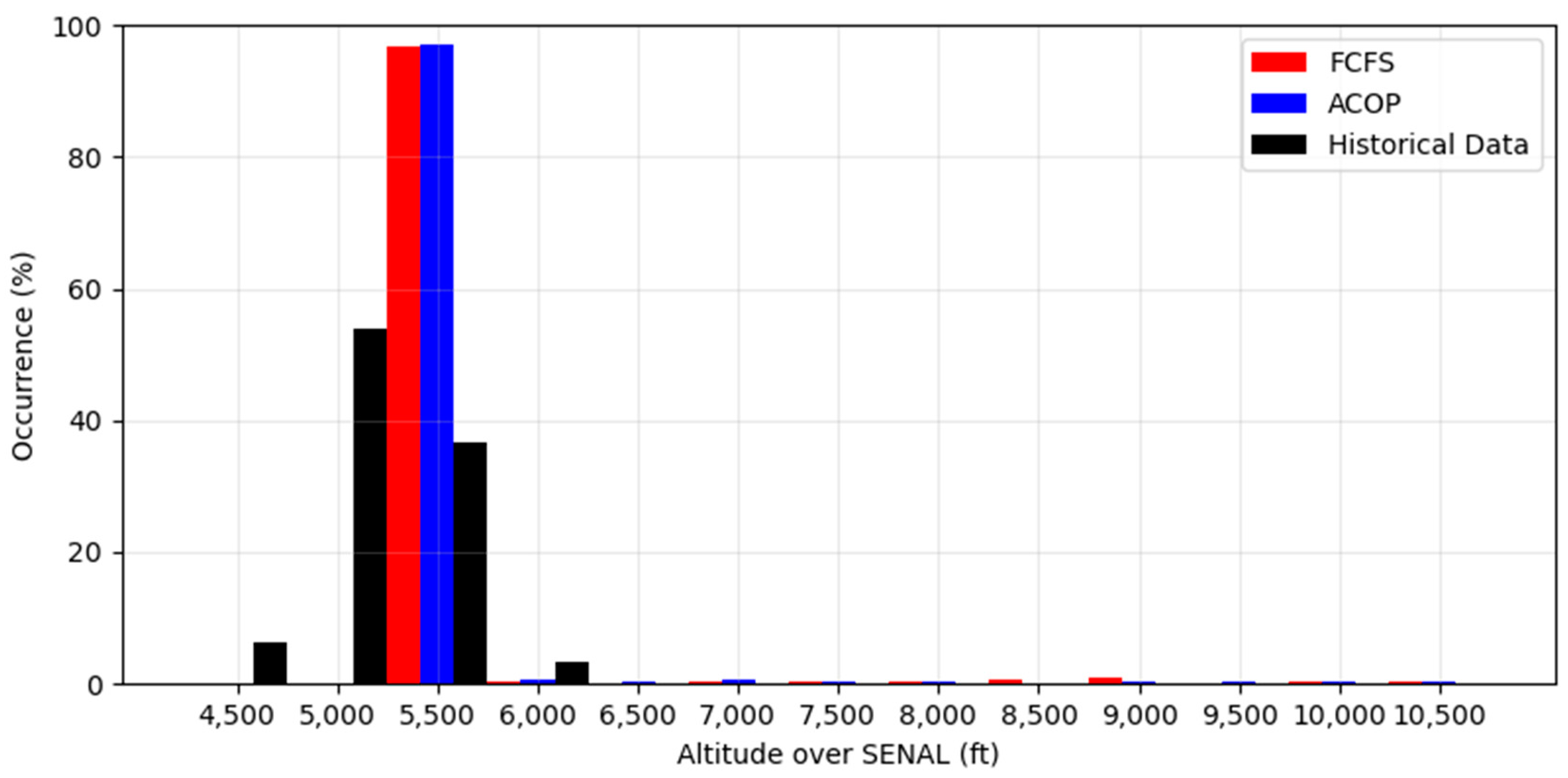
- Finally, regarding the environmental impact, a relevant indicator is related to the adherence to CDO procedures, which results from the amount of time (larger than or equal to 20 s) spent in level flight from the top of descent (TOD) to the FAF [12]. In our case, we consider only the aircraft descent from the initial fix of the STAR procedure to the FAF. We also considered the number of performed horizontal flight segments not shorter than 20 s. Of course, it should be noted that an accurate CDO simulation is out of the scope of this work, therefore we assumed that the vertical profile is simply computed by imposing a FPA that constantly points to SENAL at an altitude of 5500 ft (a tunable parameter).
4.5. Results
4.5.1. Flight Time Reduction
4.5.2. Conflict Prevention
4.5.3. CDO-Like Facilitation
4.6. ACOP Strengths and Weaknesses
- Reduced flight times and increased runway throughput, thanks to the global optimal sequencing;
- Reduced infringements, thanks to the DTW-based conflict reduction capability;
- Optimized resolution maneuvers, thanks to reinforcement learning approach;
- The aircraft paths are known in advance because the possible resolution maneuvers do not involve vectoring or path stretching, resulting in a better situational awareness;
- Adherence to CDO-like procedures, i.e., reduced number of levelings;
- Adaptability to any airport, regardless of its size;
- Very low computational load.
- Information about the airport STAR procedure must be collected before use;
- Pairwise conflict acceptance and workload related to the use of ACOP are not yet evaluated;
- The controller acceptance and workload related to the use of ACOP are not yet evaluated.
5. Operational Aspects
6. Future Work
- Financial aspects (throughput, fuel consumption, delays);
- Environmental aspects (air pollution and noise pollution).
7. Conclusions
- Sequencing and scheduling, which consists of determining the sequence of aircraft and their arrival times at intermediate (or final) approach fix, in order to make the best use of the terminal area space and to increase overall runway throughput and capacity. The provided solution must always meet the ICAO requirements for minima longitudinal separations, depending on the type of aircraft pairs (Table 1).
- Conflict detection and resolution (CDR), which consists of preventing loss of separations (LOS), i.e., simultaneous violations of ICAO minima horizontal and vertical separation distances, assumed equal to 5 NM and 1000 ft, respectively. To achieve this objective, each aircraft was assumed to be able to decelerate and/or level its flight (the latter action is used the minimum necessary, to maximize compliance with CDO-like procedures).
- The average flight time to FAF of each aircraft is reduced by 1.44 min, with a cumulative time saving of more than 24 h. In addition, the average time length of the arrival queue is reduced by about 11.6 s. This better use of airspace opens the possibility of increasing runway capacity and throughput by properly tuning the upstream traffic.
- Regarding the safety aspects, it should be noted that:
- Thanks to the ACOP conflict reduction capability of the SSL—performed by the dynamic time warping (DTW) technique—the number of conflict detections decreases from 175 to 119, while the percentage of the successful CDRs increases from 92% to 99%;
- The applicable ICAO safety rules are always respected, except for one case, where both aircraft were already involved in a conflict resolution maneuver. This situation can be tolerated because it is strongly related to the traffic level, which is clearly too high for the adopted airport.
- Regarding the environmental aspects focusing on CDO, the leveled segments in the CDO-like procedures are minimized to about 2%.
- The short ACOP response time (~1 s) and the high usability of the user interface is also an important feature, which is particularly promising with respect to the next real applications.
- Finally, a dedicated sensitivity analysis was conducted to evaluate ACOP’s robustness to CDR with respect to potential delays resulting from human–machine interaction.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ACOP | Arrival digital assistant with COnflict Prevention |
| AI | Artificial intelligence |
| ANSP | Air navigation services provider |
| APP | Approach control unit |
| ASSP | Arrival sequencing and scheduling problem |
| ATC | Air traffic control |
| ATM | Air traffic management |
| ATCO | ATC Operator |
| CDO | Continuous descent operation |
| CDR | Conflict detection and resolution |
| CML | Conflict management layer |
| CPA | Closest point of approach |
| CR | Conflict resolution |
| CPS | Constrained positioning shifting |
| CTA | Control area |
| CTSP | Cumulative traveling salesman problem |
| DPS | Dynamic positioning shifting |
| DQN | Deep Q-network |
| DTG | Distance to go |
| DTW | Dynamic time warping |
| ENAV | Ente Nazionale per l’Assistenza al Volo |
| ETA | Estimated time of arrival |
| FAA | Federal Aviation Administration |
| FAF | Final approach fix |
| FCFS | First come, first served |
| FL | Flight level |
| FPA | Flight path angle |
| GLS | Genetic local search |
| IAS | Indicated air speed |
| ICAO | International Civil Aviation Organization |
| KPI | Key performance indicator |
| LOS | Loss of separation |
| ML | Machine learning |
| MPC | Model predictive control |
| MST | Mean separation time |
| NextGen | Next generation air transportation system |
| RL | Reinforcement learning |
| RNAV | aRea NAVigation |
| SESAR | Single European Sky ATM Research |
| SSL | Sequencing and scheduling layer |
| STAR | Standard terminal arrival route |
| TMA | Terminal maneuvering area |
| TOD | Top of descent |
| TSP | Travelling salesman problem |
References
- Kistan, T.; Gardi, A.; Sabatini, R.; Ramasamy, S.; Batuwangala, E. An Evolutionary Outlook of Air Traffic Flow Management Techniques. Prog. Aerosp. Sci. 2017, 88, 15–42. [Google Scholar] [CrossRef]
- Anagnostakis, I.; Clarke, J.-P.; Bohme, D.; Volckers, U. Runway Operations Planning and Control Sequencing and Scheduling. In Proceedings of the 34th Annual Hawaii International Conference on System Sciences, Maui, HI, USA, 6 January 2001. [Google Scholar] [CrossRef]
- Artiouchine, K.; Baptiste, P.; Dürr, C. Runway Sequencing with Holding Patterns. Eur. J. Oper. Res. 2008, 189, 1254–1266. [Google Scholar] [CrossRef] [Green Version]
- Bäuerle, N.; Engelhardt-Funke, O.; Kolonko, M. On the Waiting Time of Arriving Aircrafts and the Capacity of Airports with One or Two Runways. Eur. J. Oper. Res. 2007, 177, 1180–1196. [Google Scholar] [CrossRef] [Green Version]
- Xu, B.; Ma, W.; Huang, H.; Yue, L. Weighted Constrained Position Shift Model for Aircraft Arrival Sequencing and Scheduling Problem. Asia-Pac. J. Oper. Res. 2016, 33, 1650028. [Google Scholar] [CrossRef]
- EASA. Easy Access Rules for ATM-ANS (Regulation (EU) 2017/373). 2022. Available online: https://www.easa.europa.eu/en/document-library/easy-access-rules/online-publications/easy-access-rules-atm-ans-regulation-eu?page=2#_DxCrossRefBm2104645389 (accessed on 27 March 2023).
- Ma, J.; Delahaye, D.; Sbihi, M.; Scala, P.; Mujica Mota, M.A. Integrated Optimization of Terminal Maneuvering Area and Airport at the Macroscopic Level. Transp. Res. Part C Emerg. Technol. 2019, 98, 338–357. [Google Scholar] [CrossRef] [Green Version]
- Cao, J.-M.; Kanafani, A. The Value of Runway Time Slots for Airlines. Eur. J. Oper. Res. 2000, 126, 491–500. [Google Scholar] [CrossRef] [Green Version]
- Hardell, H.; Lemetti, A.; Polishchuk, T.; Smetanová, L. Evaluation of the Sequencing and Merging Procedures at Three European Airports Using Opensky Data. Eng. Proc. 2022, 13, 13. [Google Scholar] [CrossRef]
- Sáez, R.; Prats, X.; Polishchuk, T.; Polishchuk, V. Traffic Synchronization in Terminal Airspace to Enable Continuous Descent Operations in Trombone Sequencing and Merging Procedures: An Implementation Study for Frankfurt Airport. Transp. Res. Part C Emerg. Technol. 2020, 121, 102875. [Google Scholar] [CrossRef]
- Post, W.; de Jonge, H.W.G. Free Flight in a Ground-Controlled ATM Environment; National Aerospace Laboratory NLR: Amsterdam, The Netherlands, 1997. [Google Scholar]
- EUROCONTROL. European CCO/CDO Action Plan; Eurocontrol: Brussels, Belgium, 2020. [Google Scholar]
- Clarke, J.-P.B.; Ho, N.T.; Ren, L.; Brown, J.A.; Elmer, K.R.; Tong, K.-O.; Wat, J.K. Continuous Descent Approach: Design and Flight Test for Louisville International Airport. J. Aircr. 2004, 41, 1054–1066. [Google Scholar] [CrossRef]
- Coppenbarger, R.A.; Mead, R.W.; Sweet, D.N. Field Evaluation of the Tailored Arrivals Concept for Datalink-Enabled Continuous Descent Approach. J. Aircr. 2009, 46, 1200–1209. [Google Scholar] [CrossRef]
- Weitz, L.A.; Hurtado, J.E.; Barmore, B.E.; Krishnamurthy, K. An Analysis of Merging and Spacing Operations with Continuous Descent Approaches. In Proceedings of the 24th Digital Avionics Systems Conference, Washington, DC, USA, 30 October 2005–3 November 2005; Volume 1, pp. 2–21. [Google Scholar] [CrossRef]
- Knote, R.; Söllner, M.; Leimeister, J.M. Towards a Pattern Language for Smart Personal Assistants. In Proceedings of the 25th Conference on Pattern Languages of Programs, PLoP ’18, Portland, OR, USA, 25 October 2018; pp. 1–16. [Google Scholar]
- Su, H.; Liu, S.; Zheng, B.; Zhou, X.; Zheng, K. A Survey of Trajectory Distance Measures and Performance Evaluation. VLDB J. 2020, 29, 3–32. [Google Scholar] [CrossRef]
- EUROCONTROL. European ATM Master Plan-SESAR Joint Undertaking; Eurocontrol: Brussels, Belgium, 2015. [Google Scholar]
- Federal Aviation Administration. NextGEN AVS Work Plan 2016; Federal Aviation Administration: Washington, DC, USA, 2016. [Google Scholar]
- Bianco, L.; Dell’Olmo, P.; Giordani, S. Minimizing Total Completion Time Subject to Release Dates and Sequence-dependentprocessing Times. Ann. Oper. Res. 1999, 86, 393–415. [Google Scholar] [CrossRef]
- Erzberger, H. Design Principles and Algorithms for Automated Air Traffic Management. Change 1995, 7, 2. [Google Scholar]
- Psaraftis, H.N. A Dynamic Programming Approach for Sequencing Groups of Identical Jobs. Oper. Res. 1980, 28, 1347–1359. [Google Scholar] [CrossRef] [Green Version]
- Trivizas, D.A. Optimal Scheduling with Maximum Position Shift (MPS) Constraints: A Runway Scheduling Application. J. Navig. 1998, 51, 250–266. [Google Scholar] [CrossRef]
- Bianco, L.; Dell’Olmo, P.; Giordani, S. Scheduling Models for Air Traffic Control in Terminal Areas. J. Sched. 2006, 9, 223–253. [Google Scholar] [CrossRef]
- Malaek, S.M.B.; Naderi, E. A New Scheduling Strategy for Aircraft Landings under Dynamic Position Shifting. In Proceedings of the 2008 IEEE Aerospace Conference, Big Sky, MT, USA, 1–8 March 2008; pp. 1–8. [Google Scholar] [CrossRef]
- Bennell, J.A.; Mesgarpour, M.; Potts, C.N. Airport Runway Scheduling. 4OR 2011, 9, 115–138. [Google Scholar] [CrossRef]
- Samà, M.; D’Ariano, A.; Corman, F.; Pacciarelli, D. Metaheuristics for Efficient Aircraft Scheduling and Re-Routing at Busy Terminal Control Areas. Transp. Res. Part C Emerg. Technol. 2017, 80, 485–511. [Google Scholar] [CrossRef]
- D’Ariano, A.; Pacciarelli, D.; Pistelli, M.; Pranzo, M. Real-Time Scheduling of Aircraft Arrivals and Departures in a Terminal Maneuvering Area. Networks 2015, 65, 212–227. [Google Scholar] [CrossRef]
- Samà, M.; D’Ariano, A.; D’Ariano, P.; Pacciarelli, D. Optimal Aircraft Scheduling and Routing at a Terminal Control Area during Disturbances. Transp. Res. Part C Emerg. Technol. 2014, 47, 61–85. [Google Scholar] [CrossRef]
- Tavakkoli-Moghaddam, R.; Yaghoubi-Panah, M.; Radmehr, F. Scheduling the Sequence of Aircraft Landings for a Single Runway Using a Fuzzy Programming Approach. J. Air Transp. Manag. 2012, 25, 15–18. [Google Scholar] [CrossRef]
- Ernst, A.T.; Krishnamoorthy, M.; Storer, R.H. Heuristic and Exact Algorithms for Scheduling Aircraft Landings. Networks 1999, 34, 229–241. [Google Scholar] [CrossRef]
- Bencheikh, G.; Khoukhi, F.; Baccouche, M.; Boudebous, D.; Belkadi, A.; Ouahman, A. Hybrid Algorithms for the Multiple Runway Aircraft Landing Problem. Int. J. Comput. Sci. Appl. 2013, 10, 53–71. [Google Scholar]
- Hansen, J.V. Genetic Search Methods in Air Traffic Control. Comput. Oper. Res. 2004, 31, 445–459. [Google Scholar] [CrossRef]
- Hu, X.-B.; Di Paolo, E. An Efficient Genetic Algorithm with Uniform Crossover for Air Traffic Control. Comput. Oper. Res. 2009, 36, 245–259. [Google Scholar] [CrossRef]
- Liu, Y.-H. A Genetic Local Search Algorithm with a Threshold Accepting Mechanism for Solving the Runway Dependent Aircraft Landing Problem. Optim. Lett. 2011, 5, 229–245. [Google Scholar] [CrossRef]
- Deau, R.; Gotteland, J.-B.; Durand, N. Airport Surface Management and Runways Scheduling; ATM Seminar: Savannah, GA, USA, 2009. [Google Scholar]
- Samà, M.; D’Ariano, A.; D’Ariano, P.; Pacciarelli, D. Scheduling Models for Optimal Aircraft Traffic Control at Busy Airports: Tardiness, Priorities, Equity and Violations Considerations. Omega 2017, 67, 81–98. [Google Scholar] [CrossRef]
- Samà, M.; D’Ariano, A.; Pacciarelli, D. Rolling Horizon Approach for Aircraft Scheduling in the Terminal Control Area of Busy Airports. Transp. Res. Part E Logist. Transp. Rev. 2013, 60, 140–155. [Google Scholar] [CrossRef]
- Kuchar, J.K.; Yang, L.C. A Review of Conflict Detection and Resolution Modeling Methods. IEEE Trans. Intell. Transp. Syst. 2000, 1, 179–189. [Google Scholar] [CrossRef] [Green Version]
- Yang, Y.; Zhang, J.; Cai, K.-Q.; Prandini, M. Multi-Aircraft Conflict Detection and Resolution Based on Probabilistic Reach Sets. IEEE Trans. Control Syst. Technol. 2017, 25, 309–316. [Google Scholar] [CrossRef]
- Hao, S.; Cheng, S.; Zhang, Y. A Multi-Aircraft Conflict Detection and Resolution Method for 4-Dimensional Trajectory-Based Operation. Chin. J. Aeronaut. 2018, 31, 1579–1593. [Google Scholar] [CrossRef]
- Yokoyama, N. Decentralized Conflict Detection and Resolution Using Intent-Based Probabilistic Trajectory Prediction. In 2018 AIAA Guidance, Navigation, and Control Conference; AIAA SciTech Forum; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2018. [Google Scholar] [CrossRef]
- Jilkov, V.P.; Ledet, J.H.; Li, X.R. Multiple Model Method for Aircraft Conflict Detection and Resolution in Intent and Weather Uncertainty. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 1004–1020. [Google Scholar] [CrossRef]
- Radanovic, M.; Piera Eroles, M.A.; Koca, T.; Ramos Gonzalez, J.J. Surrounding Traffic Complexity Analysis for Efficient and Stable Conflict Resolution. Transp. Res. Part C Emerg. Technol. 2018, 95, 105–124. [Google Scholar] [CrossRef]
- Sutton, R.S.; Barto, A.G. Reinforcement Learning: An Introduction, 2nd ed.; A Bradford Book; The MIT Press: Cambridge, MA, USA, 2015. [Google Scholar]
- Wang, Z.; Pan, W.; Li, H.; Wang, X.; Zuo, Q. Review of Deep Reinforcement Learning Approaches for Conflict Resolution in Air Traffic Control. Aerospace 2022, 9, 294. [Google Scholar] [CrossRef]
- The Mathworks, Inc. MATLAB Version 9.10.0.1613233 (R2021a); The Mathworks, Inc.: Natick, MA, USA, 2021. [Google Scholar]
- Goldberg, D.E. Genetic Algorithms in Search, Optimization and Machine Learning, 1st ed.; Addison-Wesley Longman Publishing Co., Inc.: Boston, MA, USA, 1989. [Google Scholar]
- Errico, A.; Di Vito, V. Methodology for Estimation of Closest Point of Approach between Aircraft in ATM. In AIAA Aviation 2019 Forum; AIAA AVIATION Forum; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2019. [Google Scholar] [CrossRef]
- Van Rossum, G.; Drake, F.L. Python 3 Reference Manual; CreateSpace: Scotts Valley, CA, USA, 2009. [Google Scholar]
- Brockman, G.; Cheung, V.; Pettersson, L.; Schneider, J.; Schulman, J.; Tang, J.; Zaremba, W. OpenAI Gym. arXiv 2016. Available online: http://arxiv.org/abs/1606.01540 (accessed on 11 February 2023).
- Raffin, A.; Hill, A.; Gleave, A.; Kanervisto, A.; Ernestus, M.; Dormann, N. Stable-Baselines3: Reliable Reinforcement Learning Implementations. J. Mach. Learn. Res. 2021, 22, 12348–12355. [Google Scholar]
- ENAV. AIP-Italia AD 2 LIEO 4-1. 2020. Available online: https://www.enav.it/services/list/aip (accessed on 27 March 2023).
- ENAV. AIP-Italia ENR2.1.1.4.5-2. 2018. Available online: https://www.enav.it/services/list/aip (accessed on 27 March 2023).
- ICAO. Manual of the ICAO Standard Atmosphere: Extended to 80 Kilometres (262 500 Feet), 3rd ed.; International Civil Aviation Organization: Montreal, QC, Canada, 1993. [Google Scholar]
- APACHE Project Consortium. Review of Current KPIs and Proposal for New Ones; SESAR Joint Undertaking: Brussels, Belgium, 2017. [Google Scholar]
- Feigh, K.M. An Airspace Simulator for Air Traffic Management Research. Master’s Thesis, Department of Power, Propulsion and Aerospace Engineering, Cranfield University, Bedford, UK, 2003. [Google Scholar]
- Blom, H.A.; Bakker, B.G. Can Ground-Based Separation Accommodate Very High En Route Traffic Demand as Well as Advanced Self-Separation? In Proceedings of the 15th AIAA Aviation Technology, Integration, and Operations Conference, Dallas, TX, USA, 22–26 June 2015; p. 3180. [Google Scholar]
- Ziccardi, J.; Roberts, Z.; O’Connor, R.; Rorie, C.; Morales, G.; Battiste, V.; Strybel, T.; Chiappe, D.; Vu, K.-P.L.; Shively, J. Measuring UAS Pilot Responses to Common Air Traffic Clearances. In Human Interface and the Management of Information. Information and Interaction for Health, Safety, Mobility and Complex Environments; Yamamoto, S., Ed.; Springer Berlin Heidelberg: Berlin/Heidelberg, Germany, 2013; pp. 606–612. [Google Scholar]
- Palumbo, R.; Errico, A.; Pascarella, D.; Gargiulo, F.; Filippone, E. Modeling Approach for Resilience Engineering of the Future ATM System. In Proceedings of the 15th AIAA Aviation Technology, Integration, and Operations Conference, Dallas, TX, USA, 22–26 June 2015. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Trailing Aircraft Category | ||||
|---|---|---|---|---|
| 1 | 2 | 3 | ||
| Leading Aircraft Category | 1 | 82 | 69 | 60 |
| 2 | 131 | 69 | 60 | |
| 3 | 196 | 157 | 96 | |
| Arrival Time Interval (Min) | Nr. of LOSs (FCFS SSL) | Nr. of LOSs (ACOP SSL) | Difference |
|---|---|---|---|
| 2 | 35 | 32 | −3 |
| 3 | 16 | 15 | −1 |
| 4 | 9 | 7 | −2 |
| 5 | 5 | 3 | −2 |
| 6 | 6 | 4 | −2 |
| 7 | 5 | 4 | −1 |
| 8 | 3 | 2 | −1 |
| 9 | 2 | 2 | 0 |
| 10 | 1 | 1 | 0 |
| 11 | 1 | 1 | 0 |
| 12 | 1 | 1 | 0 |
| 13 | 1 | 1 | 0 |
| 14 | 1 | 1 | 0 |
| Description | FCFS | ACOP |
|---|---|---|
| Nr. of LOSs | 5 | 1 |
| Nr. of LOS due to failed CDs | 1 | 0 |
| Nr. of LOS due to failed CRs | 4 | 1 |
| Nr. of detected conflicts | 175 | 119 |
| Percentage of successful CDRs | 92% | 99% |
| Nr. of DTW-based path selections | N/A | 9 |
| Description | FCFS | ACOP | Historical Data |
|---|---|---|---|
| Perc. of aircraft involved in levelings ≥ 20 s | 8% | 7.5% | 54% |
| Nr. of levelings ≥ 20 s | 105 | 85 | 87 |
| Nr. of levelings < 20 s | 3 | 0 | 36 |
| Nr. of levelings imposed by STAR procedure | 288 | 174 | 60 |
| Total leveling time (≥20 s) | 264.8 min | 335.1 min | 124.5 min |
| Total flight time | 13,546 min | 12,101.7 min | 726.5 min |
| Perc. total lev. time (≥20 s) over tot. flight time | 1.9% | 2.8% | 17.14% |
| Actor | Response Time (s) |
|---|---|
| Pilot | between 10 and 25 |
| Controller | between 5 and 10 |
| Voice communications | less than 10 |
| Transmission delay | less than 1 |
| Simulated Latency (s) | ACOP Average Latency Parameter (s) | Nr. of LOS |
|---|---|---|
| 0 | 0 | 1 |
| [15, 35] unif. distrib. | 0 and 25 | 2 and 1 |
| [35, 55] unif. distrib. | 0 and 45 | 7 and 6 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nebula, F.; Palumbo, R.; Gigante, G.; Vozella, A. Digital Assistant for Arrival Scheduling with Conflict Prevention Capabilities. Information 2023, 14, 216. https://doi.org/10.3390/info14040216
Nebula F, Palumbo R, Gigante G, Vozella A. Digital Assistant for Arrival Scheduling with Conflict Prevention Capabilities. Information. 2023; 14(4):216. https://doi.org/10.3390/info14040216
Chicago/Turabian StyleNebula, Francesco, Roberto Palumbo, Gabriella Gigante, and Angela Vozella. 2023. "Digital Assistant for Arrival Scheduling with Conflict Prevention Capabilities" Information 14, no. 4: 216. https://doi.org/10.3390/info14040216
APA StyleNebula, F., Palumbo, R., Gigante, G., & Vozella, A. (2023). Digital Assistant for Arrival Scheduling with Conflict Prevention Capabilities. Information, 14(4), 216. https://doi.org/10.3390/info14040216