
The Kalman Filtering Blind Adaptive Multi-user Detector Based on Tracking Algorithm of Signal Subspace


{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Signal and Channel Model
3. Kalman Filtering Blind Adaptive Multi-user Detector Based on Tracking Algorithm of Signal Subspace
3.1. Kalman Filtering Blind Adaptive Multi-user Detector
| Algorithm 1. Kalman filtering blind adaptive multi-user detector algorithm with direct sequence code division multiple access (DS-CDMA). |
| Initial condition: |
3.2. The Blind Adaptive Multi-user Detector Based on Subspace Tracking Algorithm

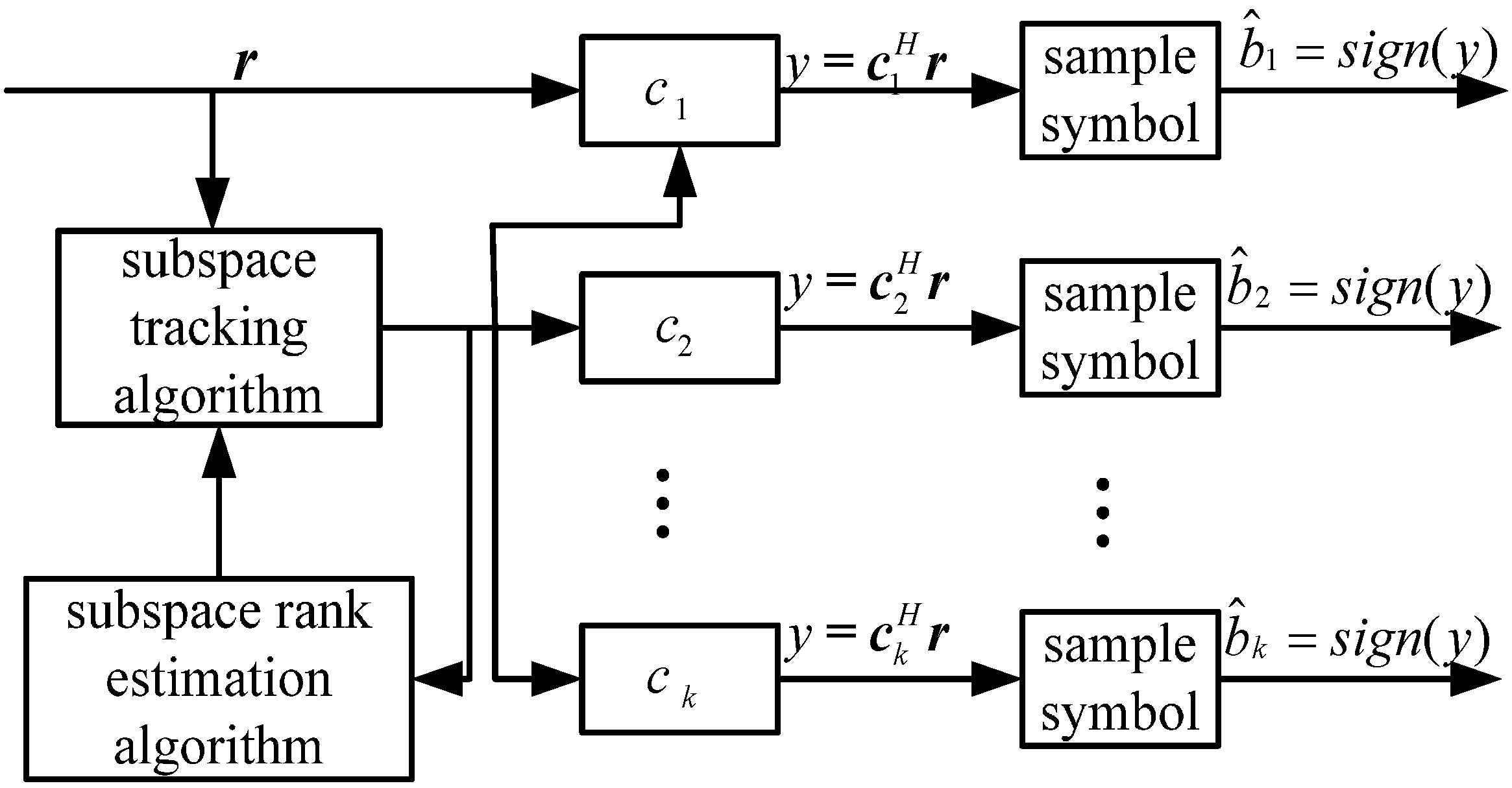
3.3. Kalman Filtering Blind Adaptive Multi-user Detector Based on Tracking the Signal Subspace
| Algorithm 2. Orthogonal projection approximation subspace tracking (OPAST) algorithm. |
| Algorithm 3. Minimum description length (MDL) criterion. |
Adjust weight vector to the size of and initialize again. |
| Algorithm 4. Kalman adaptive filtering estimation. |
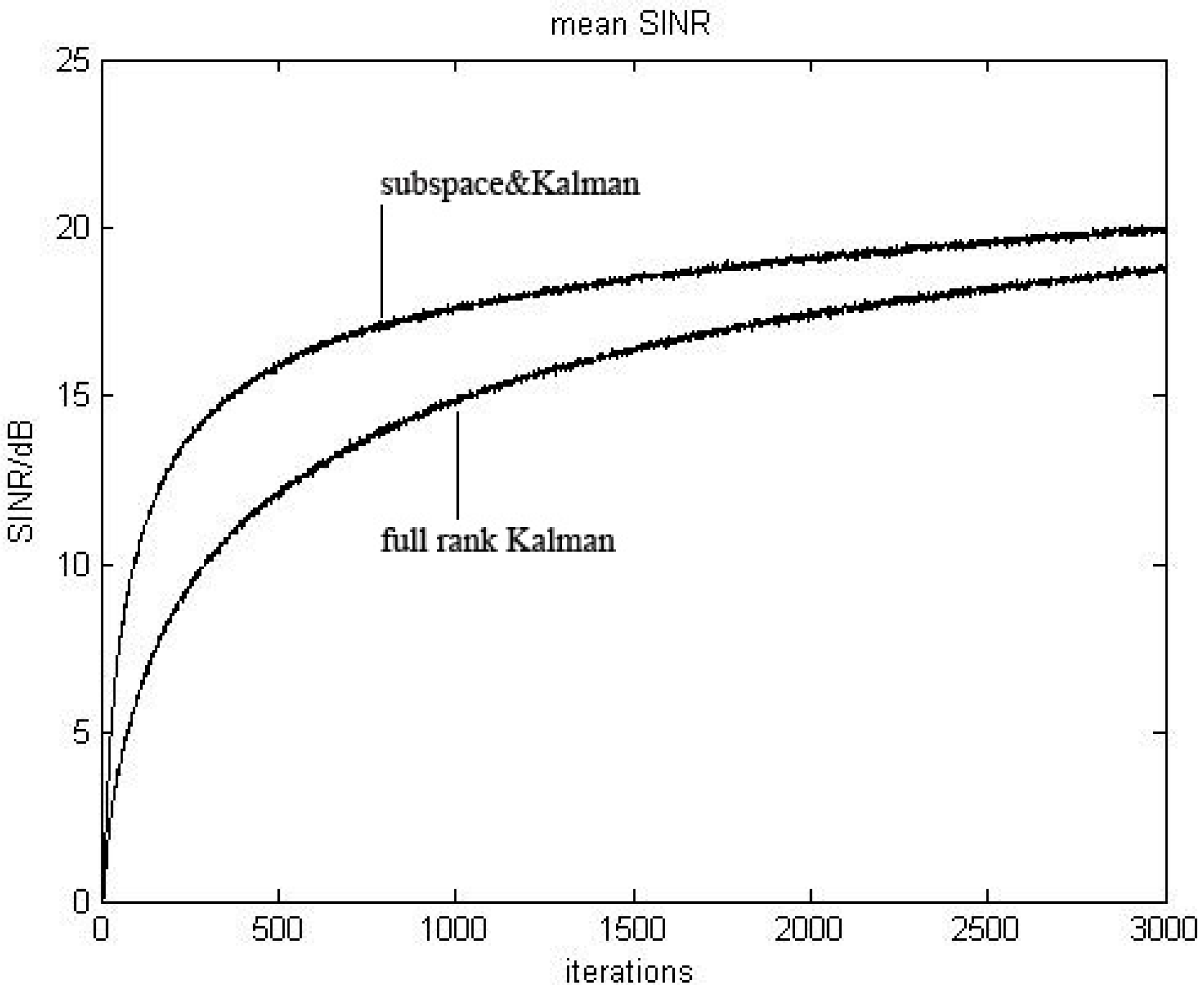
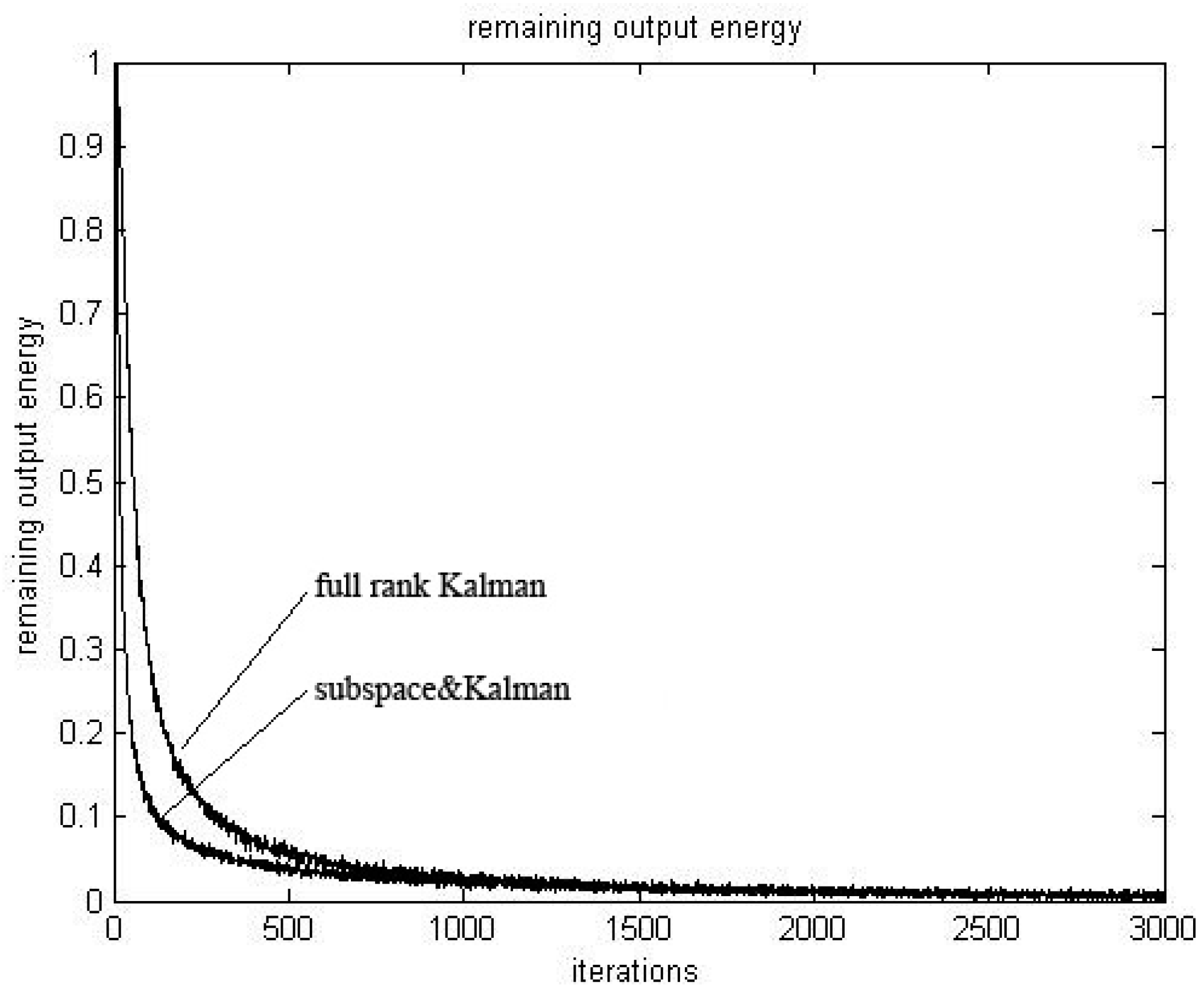
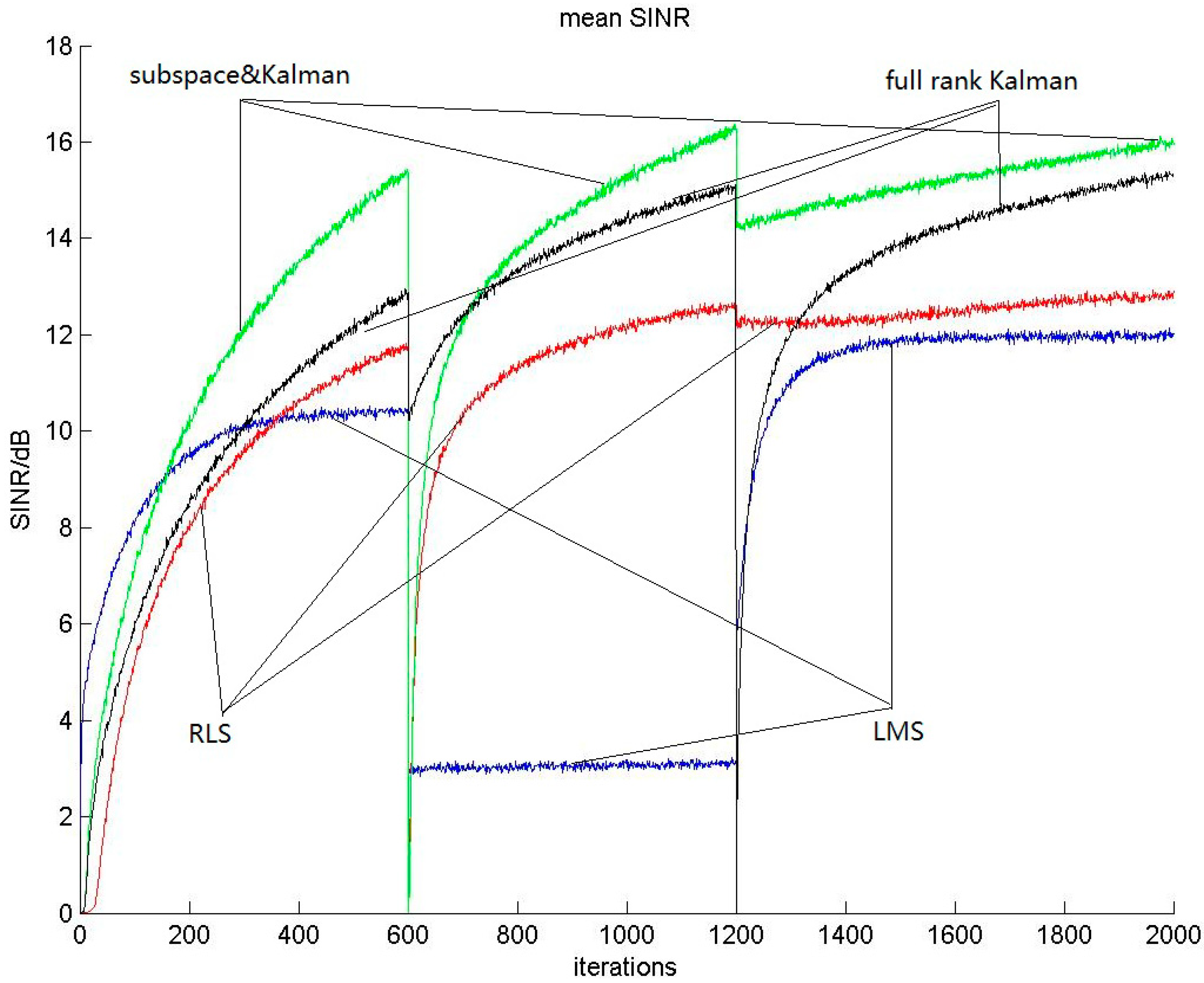
4. Simulation Results and Analyses



5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Moshavi, S. Multi-user detection for DS-CDMA communications. IEEE Commun. Mag. 1996, 34, 124–136. [Google Scholar] [CrossRef]
- Zhang, J.; Zhang, H.; Cui, Z. Dual-antenna-based blind joint hostile jamming cancellation and multi-user detection for uplink of asynchronous direct-sequence code-division multiple access systems. IET Commun. 2013, 10, 911–921. [Google Scholar] [CrossRef]
- Shi, P.; Li, H.; Ren, M. Multiuser detector based on blind adaptive Kalman filtering. Comput. Eng. Appl. 2012, 48, 131–134. (In Chinese) [Google Scholar]
- Ravindrababu, J.; Rao, E.V.K.; Rao, Y.R. Interference and Complexity Reduction in Multi-stage Multi-user Detection in DS-CDMA. Wirel. Pers. Commun. 2014, 79, 1385–1400. [Google Scholar] [CrossRef]
- Zhang, D.; Wang, K.; Zhang, X. Blind adaptive affine projection algorithm-based multiuser detector over a multipath fading channel. Signal Process. 2010, 90, 2102–2106. [Google Scholar] [CrossRef]
- Moghari, M.H.; Shahrrava, B. Group-blind turbo multiuser detection for CDMA using a Gaussian approximation. In Proceedings of 2005 IEEE Wireless Communications and Networking Conference, New Orleans, LA, USA, 13–17 March 2005; pp. 333–339.
- Zhang, X.; Wei, W. Blind adaptive multiuser detection based on Kalman filtering. IEEE Trans. Signal Process. 2002, 50, 87–95. [Google Scholar] [CrossRef]
- Wang, X.; Poor, H.V. Blind multiuser detection: A subspace approach. IEEE Trans. Inf. Theory 1998, 44, 677–690. [Google Scholar] [CrossRef]
- Meng, Y.; Wang, J.; Zhu, J.; Wang, H. Blind multiuser detection using the subspace-based linearly constrained LSCMA. Signal Process. 2008, 88, 2246–2253. [Google Scholar] [CrossRef]
- Liu, X.; Teh, K.C.; Gunawan, E. A blind adaptive MMSE multiuser detector over multipath CDMA channels and its analysis. IEEE Trans. Wirel. Commun. 2008, 7, 90–97. [Google Scholar] [CrossRef]
- Roy, S. Subspace blind adaptive detection for multiuser CDMA. IEEE Trans. Commun. 2000, 48, 169–175. [Google Scholar] [CrossRef]
- Liu, X.; Han, Y. Multi-User Detection of DS-CDMA Based on Improved-ICA. In Proceedings of 2010 International Conference on Multimedia Technology (ICMT), Ningbo, China, 29–31 October 2010; pp. 1–4.
- Liu, X.; Han, Y. Multi-user detection of DS-CDMA based on noise-ICA. In Proceedings of 2010 International Conference on Computer Application and System Modeling (ICCASM), Taiyuan, China, 22–24 October 2010; pp. V2-177–V2-180.
- Meng, Y.; You, M.; Luo, H.; Liu, G. The Subspace-Based Linear Conjugate CMA in BPSK-Modulated MC-CDMA Systems. Wirel. Pers. Commun. 2011, 56, 761–777. [Google Scholar] [CrossRef]
- Li, J.; Zhang, X.D. Blind adaptive multiuser detection based on affine projection algorithm. IEEE Signal Process. Lett. 2005, 12, 673–676. [Google Scholar] [CrossRef]
- Liu, X.; Teh, K.C.; Gunawan, E. Blind adaptive Kalman filter-based multiuser detector over a multipath fading channel. IEEE Commun. Lett. 2004, 8, 342–344. [Google Scholar] [CrossRef]
- Zhang, Y.; Cao, J. Dynamic blind source separation using subspace method. In Proceedings of 2010 International Conference on Web Information Systems and Mining (WISM), Sanya, China, 23–23 October 2010; pp. 433–436.
- DeGroat, R.D.; Dowling, E.M.; Ye, H.; Linebarger, D.A. Spherical subspace tracking for efficient, high performance adaptive signal processing applications. Signal Process. 1996, 50, 101–121. [Google Scholar] [CrossRef]
- Ali, I.; Kim, D.N.; Lim, J.S. Blind adaptive multiuser detection for the MC-CDMA systems using orthogonalized subspace tracking. ETRI J. 2009, 31, 193–200. [Google Scholar] [CrossRef]
- Zhang, H.; Ren, G.; Zhang, H.; Zhang, J. An improved OPAST algorithm for spatio-temporal multiuser detection technique based on subspace tracking. In Proceedings of the 9th International Conference on Communication Systems (ICCS 2004), Singapore, Singapore, 7 September 2004; pp. 401–404.
- Yang, B. Projection approximation subspace tracking. IEEE Trans. Signal Process. 1995, 43, 95–107. [Google Scholar] [CrossRef]
- Ali, I.; Kim, D.N.; Song, Y.J.; Azeemi, N.Z. A novel subspace tracking algorithm and its application to blind multiuser detection in cellular CDMA systems. J. Commun. Netw. 2010, 12, 216–221. [Google Scholar] [CrossRef]
- Zamiri-Jafarian, H.; Rastgoo, H. Recursive maximum SINR blind beamforming algorithm for CDMA systems. In Proceedings of IEEE International Conference on Communications (ICC’06), Istanbul, Turkey, 11–15 June 2006; pp. 3323–3327.
- Coulon, M.; Roviras, D. Multi-user adaptive receivers for a multiple-access system based on random permutations on time-varying frequency-selective channels with unknown delays and coefficients. IET Commun. 2012, 11, 1562–1572. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, L.; Leung, H.; Xu, P.; Ru, G.; Zhao, Q.; Xu, D. The Kalman Filtering Blind Adaptive Multi-user Detector Based on Tracking Algorithm of Signal Subspace. Information 2015, 6, 3-13. https://doi.org/10.3390/info6010003
Zhou L, Leung H, Xu P, Ru G, Zhao Q, Xu D. The Kalman Filtering Blind Adaptive Multi-user Detector Based on Tracking Algorithm of Signal Subspace. Information. 2015; 6(1):3-13. https://doi.org/10.3390/info6010003
Chicago/Turabian StyleZhou, Liqing, Henry Leung, Peng Xu, Guobao Ru, Quansheng Zhao, and Da Xu. 2015. "The Kalman Filtering Blind Adaptive Multi-user Detector Based on Tracking Algorithm of Signal Subspace" Information 6, no. 1: 3-13. https://doi.org/10.3390/info6010003
APA StyleZhou, L., Leung, H., Xu, P., Ru, G., Zhao, Q., & Xu, D. (2015). The Kalman Filtering Blind Adaptive Multi-user Detector Based on Tracking Algorithm of Signal Subspace. Information, 6(1), 3-13. https://doi.org/10.3390/info6010003