A Mobile Acquisition System and a Method for Hips Sway Fluency Assessment



Abstract
:1. Introduction
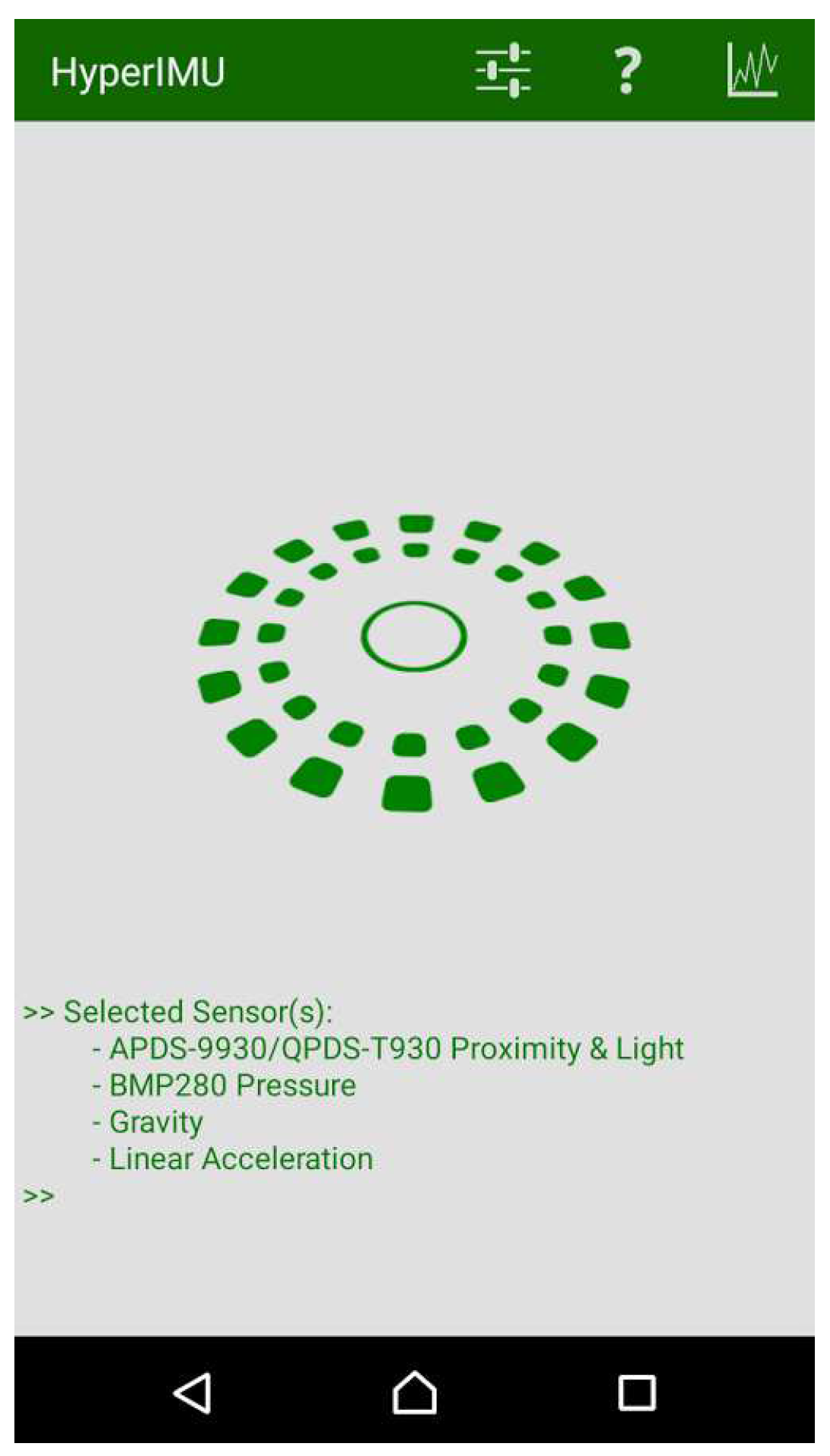
- a simple, inexpensive measurement setting based on a smartphone equipped with a free software application that reads the outcomes of the sensors embedded in the smartphone and transmits the readings to a personal computer via a wireless network. The necessary hardware is commonly available in every environment, including private houses, gymnasiums, clinics and public spaces.
- a specific Matlab software (made by the authors) that is able to read the data stream from a wireless network and to compute the kinematic jerk index associated with a body movement session, with a minimal amount of user setting effort. The developed Matlab software is made available within the paper for easy replicability.
2. Acquisition of a Gyroscopic Data-Stream by a Smartphone and a Personal Computer
| Listing 1. The Matlab® script to acquire the gyroscopic signals from a smartphone via a wireless network. | |
| % MATLAB code to read data from a WiFi network by | 1 |
| % the UDP protocol (Dipartimento di Ingegneria | 2 |
| % dell’Informazione, Universita’ Politecnica | 3 |
| % delle Marche, Italy)% delle Marche, Italy) | 4 |
| DataStream = 99999; LstTime = 180; LPort = 1234; | 5 |
| UDPComIn = udp(’0.0.0.0’,’LocalPort’,LPort); | 6 |
| set(UDPComIn,’DatagramTerminateMode’,’off’,... | 7 |
| ’InputBufferSize’,DataStream,’TimeOut’,... | 8 |
| LstTime) | 9 |
| fopen(UDPComIn); | 10 |
| readout = fscanf(UDPComIn,’%s’,DataStream); | 11 |
| fclose(UDPComIn); | 12 |
| scandata = textscan(readout,’%s’,DataStream,... | 13 |
| ’Delimiter’,’, ,#’); | 14 |
| scan = scandata{1}; | 15 |
| scan=scan(~cellfun(’isempty’,scan)); | 16 |
| apparray = cellfun(@str2num,scan); | 17 |
| data = vec2mat(apparray,3)’; | 18 |
- the attribute UDPComIn.DatagramTerminateMode to the value off, in order to make the personal computer keep acquiring packets as they become available from the smartphone;
- the attribute UDPComIn.InputBufferSize to the value DataStream, whose value is set in Line 5, so that the personal computer will stop listening after a sufficiently large number of acquired bytes;
- the attribute UDPComIn.TimeOut to the value LstTime, expressed in seconds and set in Line 5, so that the personal computer will stop listening after a sufficient time-span to allow acquiring the gyroscopic signals pertaining to a sufficiently long experiment.
3. Computational Estimation of the Kinematic Jerk Index Associated with a Gyroscopic Data Stream
| Listing 2. The Matlab® function to calculate the Cartesian kinematic jerk. | |
| % MATLAB function to compute the Cartesian | 1 |
| % kinetic jerk (Dipartimento di Ingegneria | 2 |
| % dell’Informazione, Universita’ Politecnica | 3 |
| % delle Marche, Italy) | 4 |
| function J = jerk(R,DT) | 5 |
| L = size(R,3); | 6 |
| z = zeros(3,L-1); | 7 |
| for k=2:L, | 8 |
| Omega = (1/DT)*real(logm(R(:,:,k-1)’*R(:,:,k))); | 9 |
| z(:,k-1) = [Omega(1,2),Omega(1,3),Omega(2,3)]; | 10 |
| end | 11 |
| d = T*sum(sqrt(sum(z.^2,1))); | 12 |
| je = (1/DT^2)*diff(diff(z,1,2)); | 13 |
| Cj = (L-3)^2*DT^2/d; | 14 |
| J = Cj*DT*sum(sqrt(sum(je.^2,1))); | 15 |
4. Experimental Results
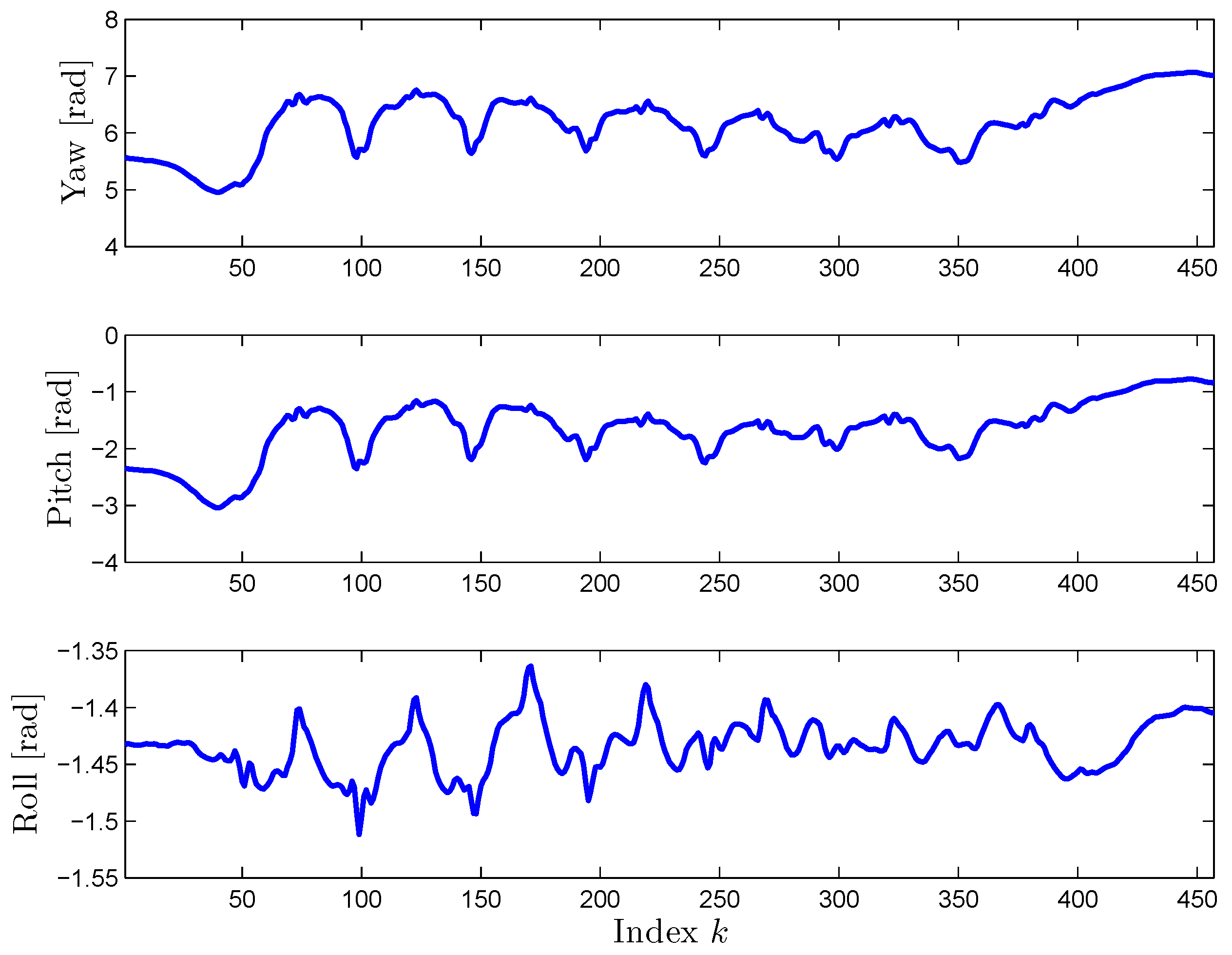
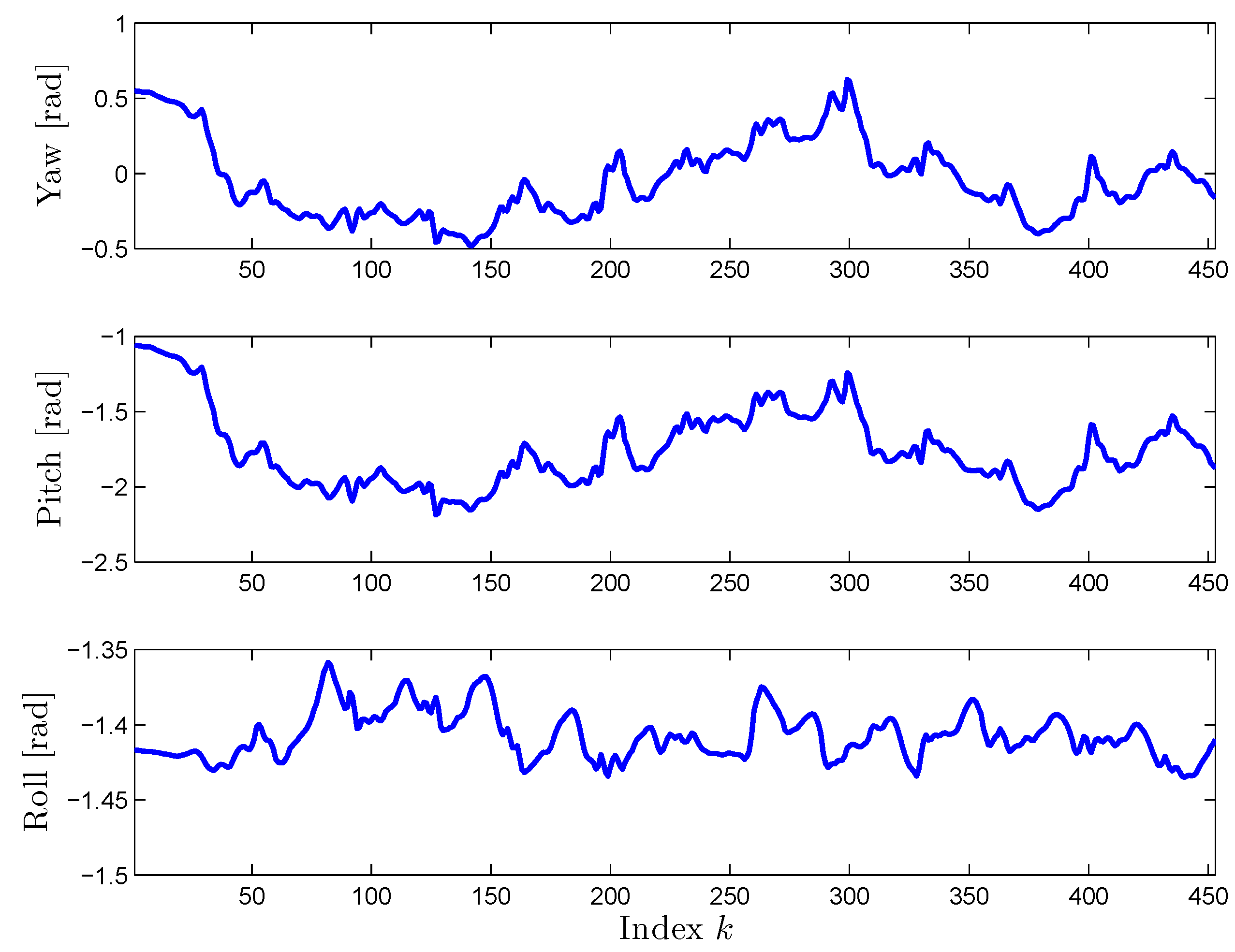
4.1. Acquisition and Evaluation of Test-Type Complex-Body-Movement Signals
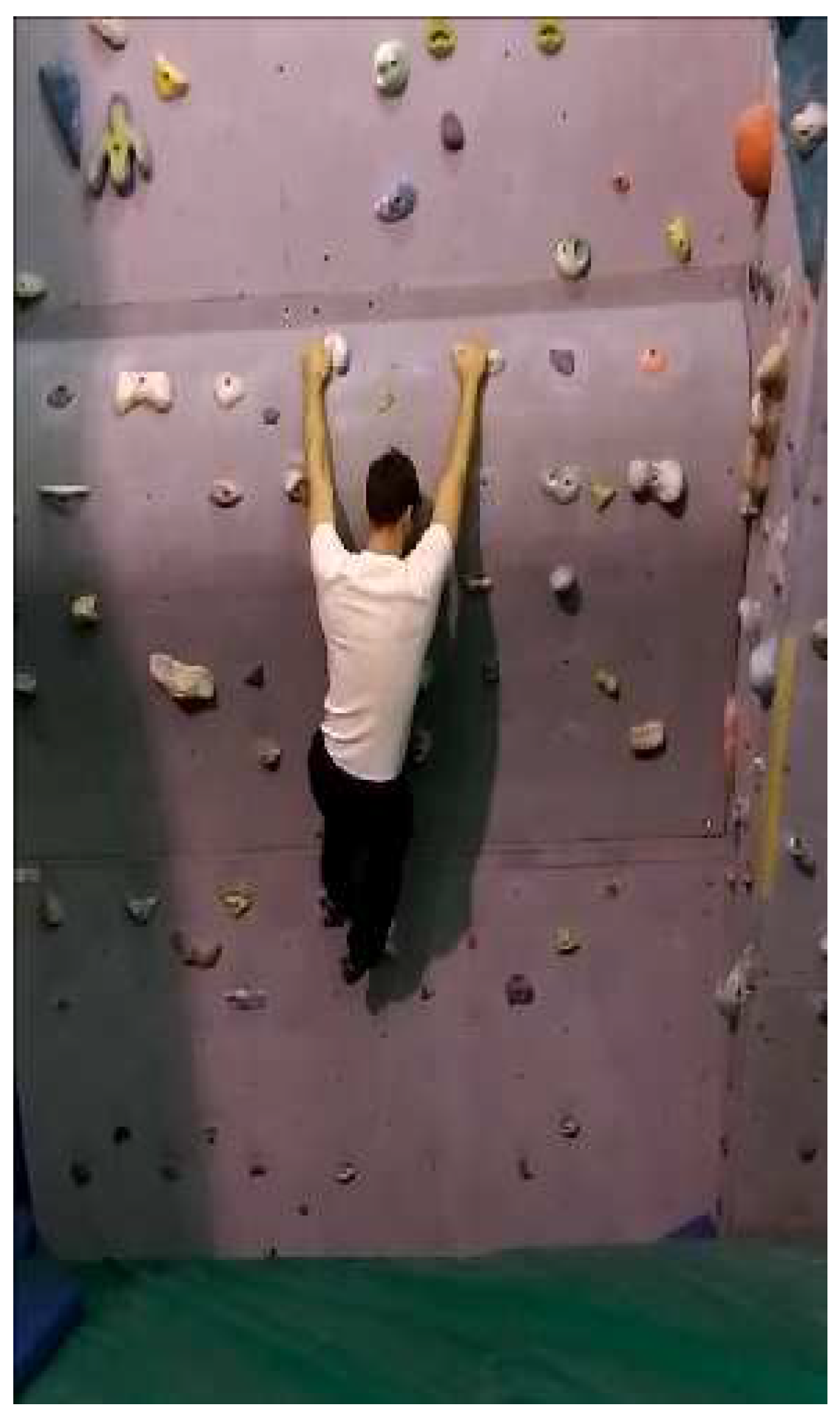
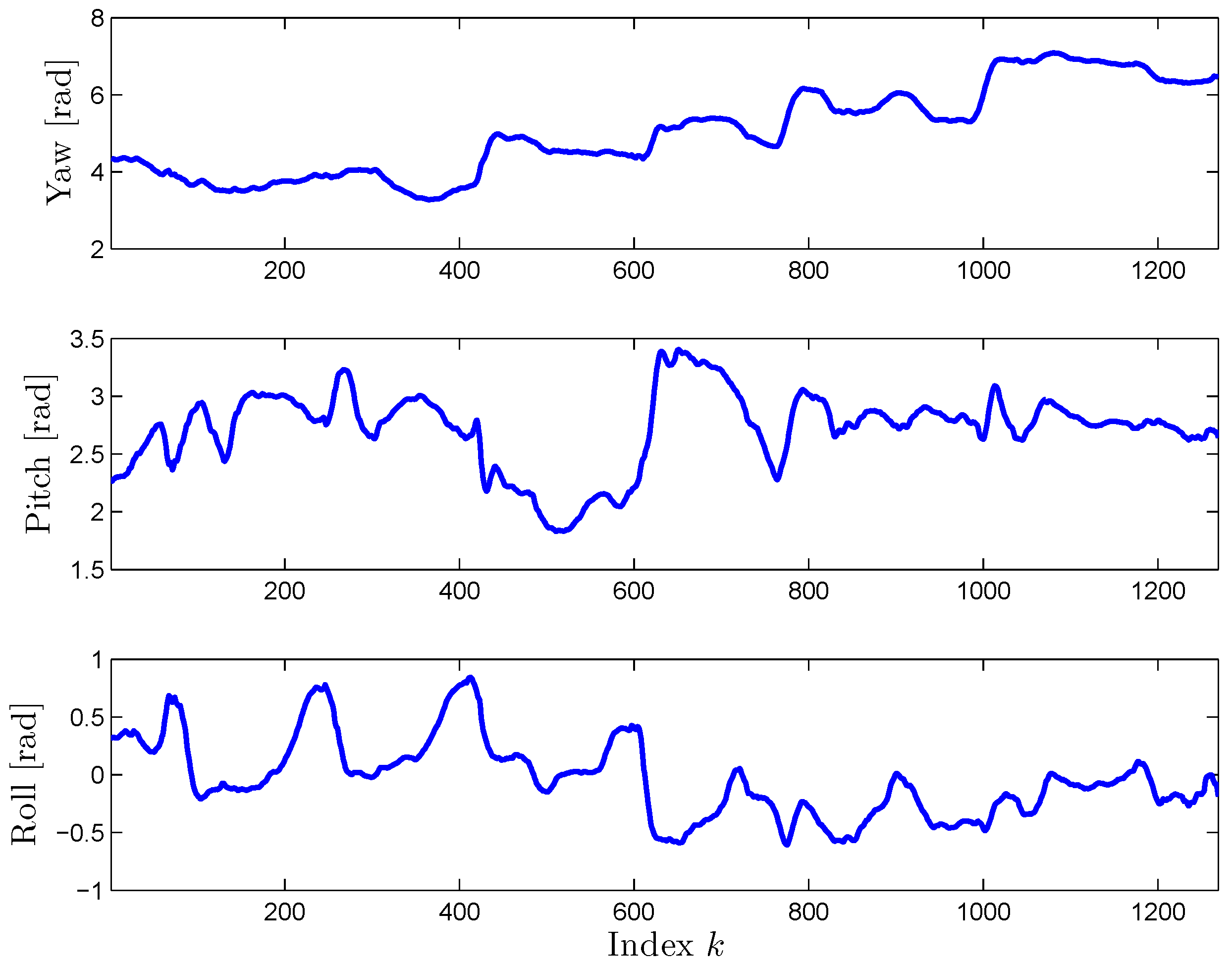
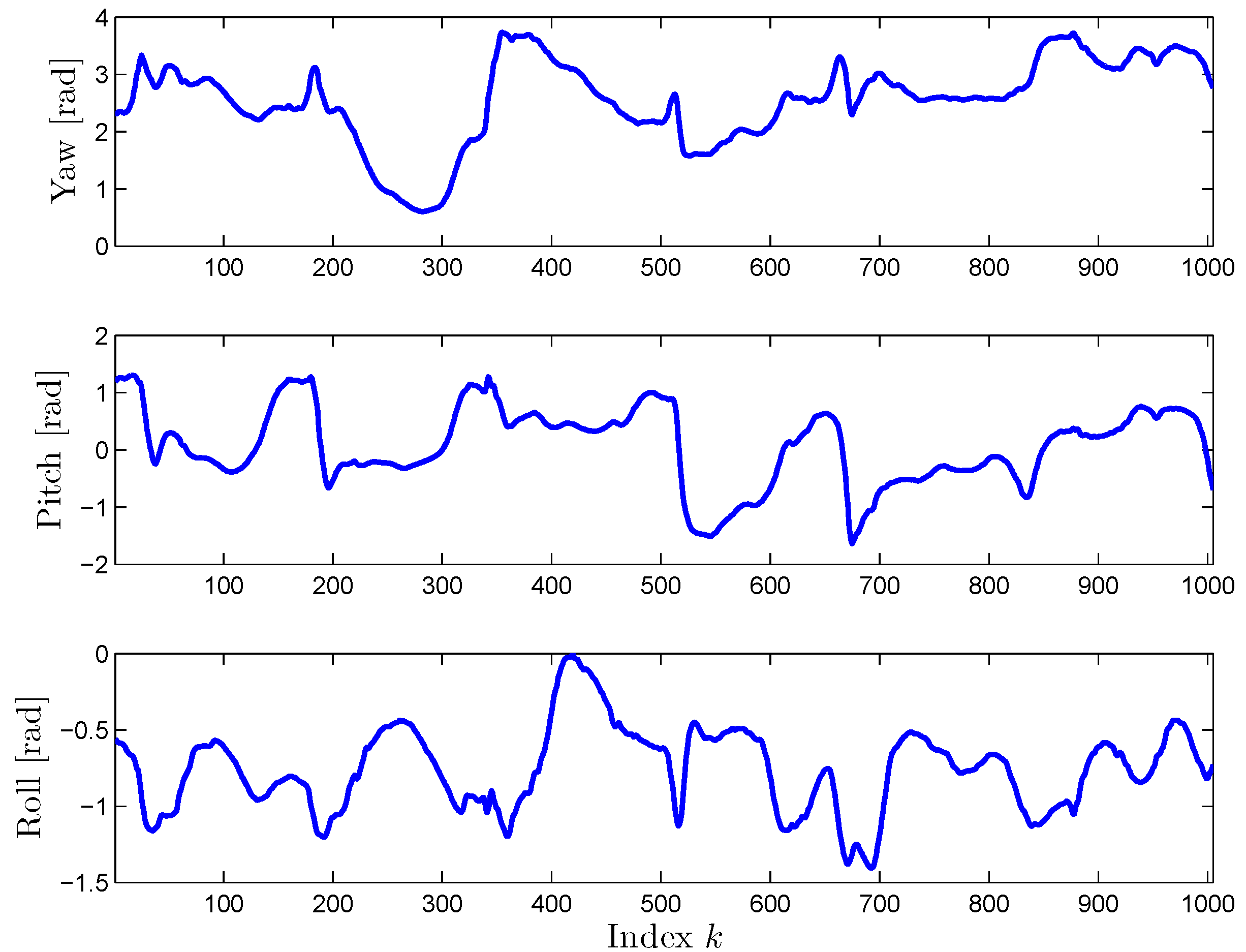
4.2. Acquisition and Evaluation of Signals during Indoor Wall Climbing Sessions
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Biess, A.; Liebermann, D.G.; Flash, T. A computational model for redundant human three-dimensional pointing movements: Integration of independent spatial and temporal motor plans simplifies movement dynamics. J. Neurosci. 2007, 27, 13045–13064. [Google Scholar] [CrossRef] [PubMed]
- Russell, S.D.; Zirker, C.A.; Blemker, S.S. Computer models offer new insights into the mechanics of rock climbing. Sports Technol. 2012, 5, 120–131. [Google Scholar] [CrossRef]
- Seifert, L.; Orth, D.; Boulanger, J.; Dovgalecs, V.; Hérault, R.; Davids, K. Climbing skill and complexity of climbing wall design: Assessment of jerk as a novel indicator of performance fluency. J. Appl. Biomech. 2014, 30, 619–625. [Google Scholar] [CrossRef] [PubMed]
- Kerr, A.; Pomeroy, V.P.; Rowe, P.J.; Dall, P.; Rafferty, D. Measuring movement fluency during the sit-to-walk task. Gait Posture 2013, 37, 598–602. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Seifert, L.; Orth, D.; Mantel, B.; Boulanger, J.; Hérault, R.; Dicks, M. Affordance realization in climbing: Learning and transfer. Front. Psychol. 2018, 9, 280. [Google Scholar] [CrossRef] [PubMed]
- Gouttebarge, V.; Inklaar, H.; Backx, F.; Kerkhoffs, G. Prevalence of osteoarthritis in former elite athletes: A systematic overview of the recent literature. Rheumatol. Int. 2015, 35, 405–418. [Google Scholar] [CrossRef] [PubMed]
- Cordier, P.; Dietrich, G.; Pailhous, J. Harmonic analysis of a complex motor behavior. Hum. Mov. Sci. 1996, 15, 789–807. [Google Scholar] [CrossRef]
- Sibella, F.; Frosio, I.; Schena, F.; Borghese, N.A. 3D analysis of the body center of mass in rock climbing. Hum. Mov. Sci. 2007, 26, 841–852. [Google Scholar] [CrossRef] [PubMed]
- Kettunen, J.A.; Kujala, U.M.; Räty, H.; Videman, T.; Sarna, S.; Impivaara, O.; Koskinen, S. Factors associated with hip joint rotation in former elite athletes. Br. J. Sports Med. 2000, 34, 44–48. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Flash, T.; Hogans, N. The coordination of arm movements: An experimentally confirmed mathematical model. J. Neurosci. 1985, 5, 1688–1703. [Google Scholar] [CrossRef]
- Rubio, F.; Valero, F.; Sunyer, J.; Cuadrado, J. Optimal time trajectories for industrial robots with torque, power, jerk and energy consumed constraints. Ind. Robot Int. J. 2012, 39, 92–100. [Google Scholar] [CrossRef] [Green Version]
- Tack, G.-R.; Choi, J.S.; Yi, J.H.; Kim, C.H. Relationship between jerk cost function and energy consumption during walking. In Proceedings of the 2006 World Congress on Medical Physics and Biomedical Engineering, Seoul, Korea, 27 August–1 September 2006; Volume 14, pp. 2917–2918. [Google Scholar]
- He, H.; Li, R.; Chen, K. Characteristics of jerk response spectra for elastic and inelastic systems. Shock Vib. 2015, 2015, 782748. [Google Scholar] [CrossRef]
- Birt, J.; Stromberga, Z.; Cowling, M.; Moro, C. Mobile mixed reality for experiential learning and simulation in medical and health sciences education. Information 2018, 9, 31. [Google Scholar] [CrossRef]
- Van, D.D.; Ai, Q.; Liu, Q. Vertical handover algorithm for WBANs in ubiquitous healthcare with quality of service guarantees. Information 2017, 8, 34. [Google Scholar] [CrossRef]
- Mellone, S.; Tacconi, C.; Chiari, L. Validity of a smartphone-based instrumented timed up and go. Gait Posture 2012, 36, 163–165. [Google Scholar] [CrossRef]
- Nishiguchi, S.; Yamada, M.; Nagai, K.; Mori, S.; Kajiwara, Y.; Sonoda, T.; Yoshimura, K.; Yoshitomi, H.; Ito, H.; Okamoto, K.; et al. Reliability and validity of gait analysis by android-based smartphone. Telemed. e-Health 2012, 18, 292–296. [Google Scholar] [CrossRef]
- Kim, A.; Kim, J.; Rietdyk, S.; Ziaie, B. Field Assessment of Gait: Accurate Measures of Step Length and Step Length Variability Provided With a Simple, Inexpensive Device. June 2014. Available online: http://www.purdue.edu/newsroom/releases/2014/Q2/smartphone-adapted-to-measure-persons-gait,-reduce-falls.html (accessed on 11 December 2018).
- Fujinami, K. On-body smartphone localization with an accelerometer. Information 2016, 7, 21. [Google Scholar] [CrossRef]
- Camurri, A.; Mazzarino, B.; Ricchetti, M.; Timmers, R.; Volpe, G. Multimodal analysis of expressive gesture in music and dance performances. In Gesture-Based Communication in Human-Computer Interaction (GW 2003); Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2003; Volume 2915. [Google Scholar]
- Uemura, M.; Tomikawa, M.; Kumashiro, R.; Miao, T.; Souzaki, R.; Ieiri, S.; Ohuchida, K.; Lefor, A.T.; Hashizume, M. Analysis of hand motion differentiates expert and novice surgeons. J. Surg. Res. 2014, 188, 8–13. [Google Scholar] [CrossRef]
- Klaas, V.C.; Troster, G.; Walt, H.; Jenewein, J. Remotely monitoring cancer-related fatigue using the smart-phone: Results of an observational study. Information 2018, 9, 271. [Google Scholar] [CrossRef]
- Seifert, L.; Cordier, R.; Orth, D.; Courtine, Y.; Croft, J.L. Role of route previewing strategies on climbing fluency and exploratory movements. PLoS ONE 2017, 12, e0176306. [Google Scholar] [CrossRef]
- Hyper IMU Mobile App. Available online: https://play.google.com/store/apps/details?id=com.ianovir.hyper_imu (accessed on 11 December 2018).
- Postel, J. RFC 768: User Datagram Protocol. Internet Engineering Task Force, August 1980. Available online: https://tools.ietf.org/html/rfc768 (accessed on 11 December 2018).
- Greenwood, D.T. Principles of Dynamics, 2nd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 1988. [Google Scholar]
- Chirikjian, G.S. Stochastic Models, Information Theory, and Lie Groups, Volume 2: Analytic Methods and Modern Applications, 1st ed.; Birkhäuser: Basel, Switzerland, 2011. [Google Scholar]
- Tsao, C.-C.; Mirbagheri, M.M. Upper limb impairments associated with spasticity in neurological disorders. J. NeuroEng. Rehabil. 2007, 4, 1–15. [Google Scholar] [CrossRef] [PubMed]
- Edelman, A.; Arias, T.A.; Smith, S.T. The geometry of algorithms with orthogonality constraints. SIAM J. Matrix Anal. Appl. 1998, 20, 303–353. [Google Scholar] [CrossRef]
- Fiori, S.; Tanaka, T. An algorithm to compute averages on matrix Lie groups. IEEE Trans. Signal Process. 2009, 57, 4734–4743. [Google Scholar] [CrossRef]
- Saha, J.; Chowdhury, C.; Chowdhury, I.R.; Biswas, S.; Aslam, N. An ensemble of condition based classifiers for device independent detailed human activity recognition using smartphones. Information 2018, 9, 94. [Google Scholar] [CrossRef]
- Timmins, K.A.; Leech, R.D.; Batt, M.E.; Edwards, K.L. Running and knee osteoarthritis: A systematic review and meta-analysis. Am. J. Sports Med. 2017, 45, 1447–1457. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cartesian Kinematic Jerk | |
|---|---|
| Walking | 104,517 |
| Running | 158,509 |
| Jumping | 206,153 |
| Experiment | Distance (12) | Kin. Jerk Index (9) |
|---|---|---|
| Inexpert—Task | 78 | 3,190,177 |
| Intermediate-level—Task | 28 | 1,136,228 |
| Expert—Task | 41 | 695,616 |
| Inexpert—Task | 39 | 797,533 |
| Intermediate-level—Task | 24 | 674,140 |
| Expert—Task | 22 | 377,639 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Civita, A.; Fiori, S.; Romani, G. A Mobile Acquisition System and a Method for Hips Sway Fluency Assessment. Information 2018, 9, 321. https://doi.org/10.3390/info9120321
Civita A, Fiori S, Romani G. A Mobile Acquisition System and a Method for Hips Sway Fluency Assessment. Information. 2018; 9(12):321. https://doi.org/10.3390/info9120321
Chicago/Turabian StyleCivita, Andrea, Simone Fiori, and Giuseppe Romani. 2018. "A Mobile Acquisition System and a Method for Hips Sway Fluency Assessment" Information 9, no. 12: 321. https://doi.org/10.3390/info9120321
APA StyleCivita, A., Fiori, S., & Romani, G. (2018). A Mobile Acquisition System and a Method for Hips Sway Fluency Assessment. Information, 9(12), 321. https://doi.org/10.3390/info9120321