
Approximating Fixed Points of Nonexpansive Type Mappings via General Picard–Mann Algorithm


Abstract
:1. Introduction and Preliminaries
2. Various Iterative Methods (or Algorithms)
- Mann [4]
- Ishikawa [10]
- Noor [11]
- Agarwal et al. [12]
- Phuengrattana and Suantai [13]
- Chugh et al. [15]
- Karaca and Yildirim [16]
- Abbas and Nazir [17]
- Thakur et al. [18]
- Sintunavarat and Pitea [19]
- Thakur et al. [20]
- Ullah and Arshad et al. [22]
- Hussain et al. [24]
- Ullah and Arshad [25]
- Piri et al. [26]
- Bhutia and Tiwary [27]
- Garodia and Uddin [28]
- Ali et al. [30]
- Ali and Ali [31]
- Hassan et al. [32]
- Rani and Arti [33]
- Ahmad et al. [34]
3. A General Picard–Mann Iterative Method
4. Convergence Theorems
- (1)
- If , then exists;
- (2)
- exists, where denotes the distance from ϑto
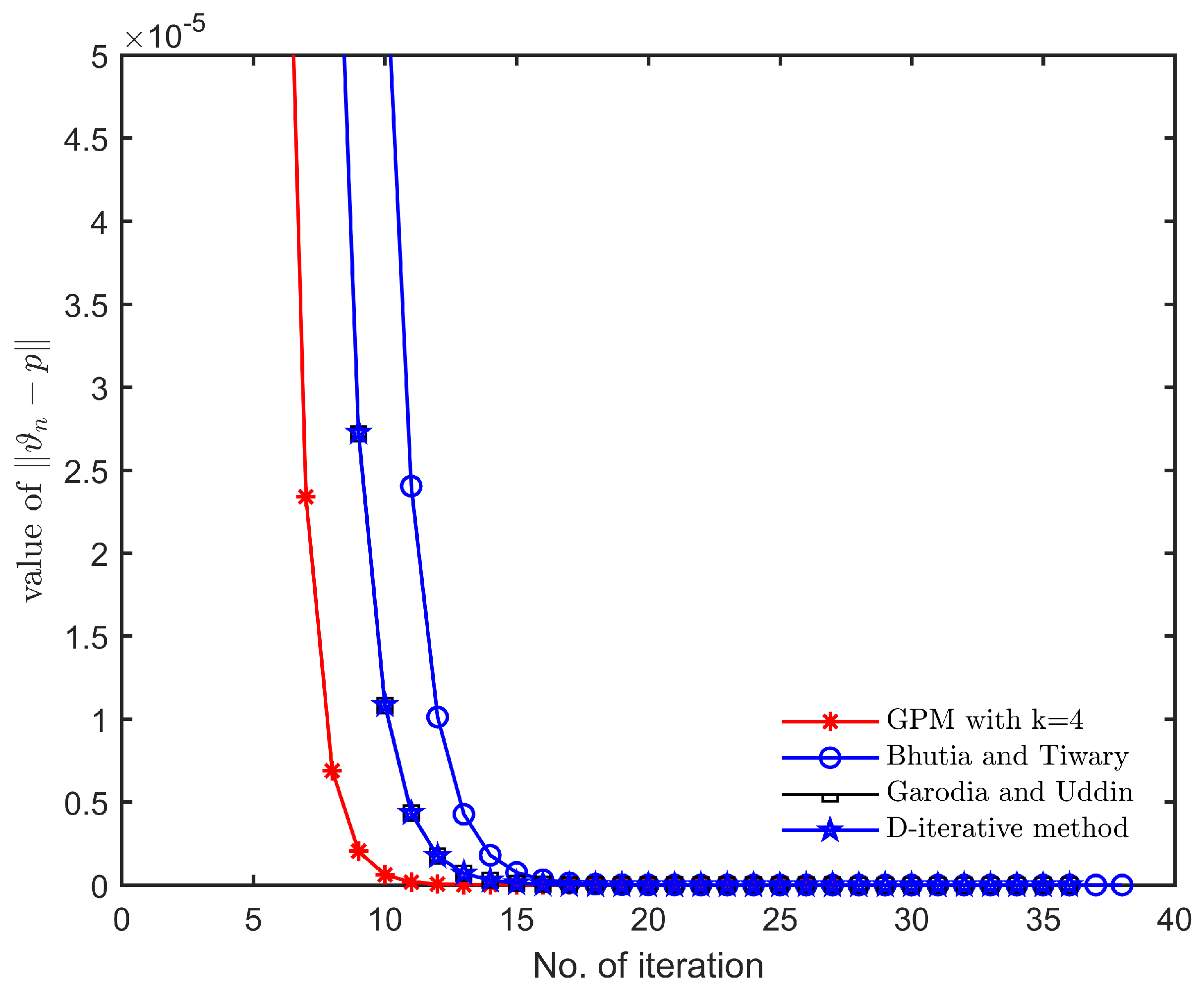
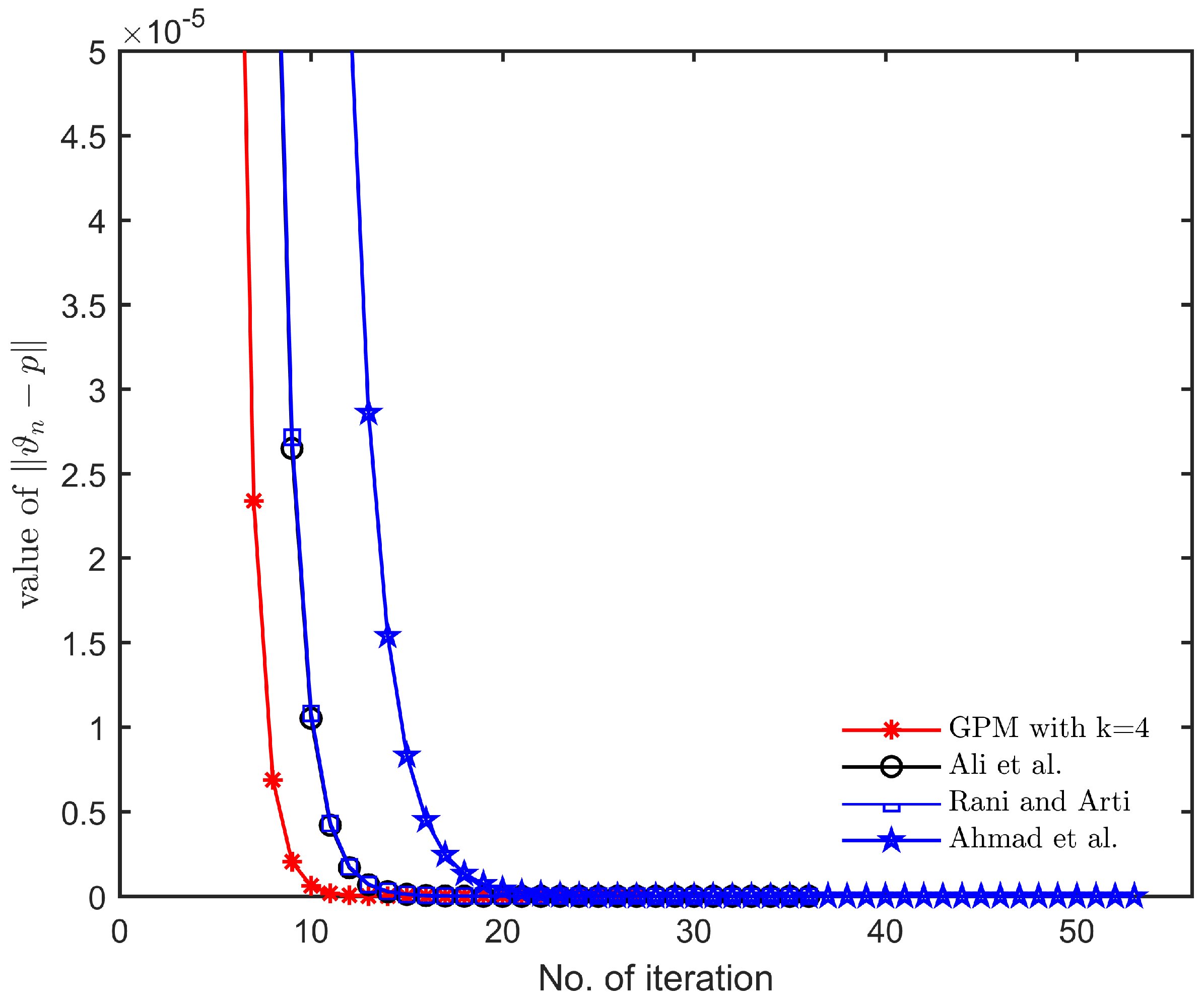
5. Numerical Results
- Case (i)
- Let If then,Let Now, we show thatNow, we can break the above inequality into two parts. First, we show the following inequality:From the triangle inequality, we haveFrom the considered range of and , we estimate that
- Case (ii)
- Let If , then is a contractive mapping and satisfies condition (E). Let We prove the following conditions:We shall break the above inequality into two parts. First, we shall prove the following inequality:By the triangle inequality, we have
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Picard, E. Mémoire sur la théorie des équations aux dérivées partielles et la méthodedes approximations successives. Mathématiques Pures Appliquées 1890, 6, 145–210. [Google Scholar]
- Krasnosel’skiĭ, M.A. Two remarks on the method of successive approximations. Uspehi Mat. Nauk 1955, 10, 123–127. [Google Scholar]
- Schaefer, H. Über die Methode sukzessiver Approximationen. Jber. Deutsch. Math.-Verein. 1957, 59, 131–140. [Google Scholar]
- Mann, W.R. Mean value methods in iteration. Proc. Amer. Math. Soc. 1953, 4, 506–510. [Google Scholar] [CrossRef]
- Pant, R.; Shukla, R.; Patel, P. Nonexpansive mappings, their extensions, and generalizations in Banach spaces. In Metric Fixed Point Theory—Applications in Science, Engineering and Behavioural Sciences; Forum for Interdisciplinary Mathematics; Springer: Singapore, 2021; pp. 309–343. [Google Scholar] [CrossRef]
- García-Falset, J.; Llorens-Fuster, E.; Suzuki, T. Fixed point theory for a class of generalized nonexpansive mappings. J. Math. Anal. Appl. 2011, 375, 185–195. [Google Scholar] [CrossRef]
- Pandey, R.; Pant, R.; Rakočević, V.; Shukla, R. Approximating fixed points of a general class of nonexpansive mappings in Banach spaces with applications. Results Math. 2019, 74, 7. [Google Scholar] [CrossRef]
- Pant, R.; Patel, P.; Shukla, R. Fixed point results for a class of nonexpansive type mappings in Banach spaces. Adv. Theory Nonlinear Anal. Appl. 2021, 5, 368–381. [Google Scholar] [CrossRef]
- Pant, R.; Patel, P.; Shukla, R.; De la Sen, M. Fixed point theorems for nonexpansive type mappings in Banach spaces. Symmetry 2021, 13, 585. [Google Scholar] [CrossRef]
- Ishikawa, S. Fixed points by a new iteration method. Proc. Amer. Math. Soc. 1974, 44, 147–150. [Google Scholar] [CrossRef]
- Noor, M.A. New approximation schemes for general variational inequalities. J. Math. Anal. Appl. 2000, 251, 217–229. [Google Scholar] [CrossRef]
- Agarwal, R.P.; O’Regan, D.; Sahu, D.R. Iterative construction of fixed points of nearly asymptotically nonexpansive mappings. J. Nonlinear Convex Anal. 2007, 8, 61–79. [Google Scholar]
- Phuengrattana, W.; Suantai, S. On the rate of convergence of Mann, Ishikawa, Noor and SP-iterations for continuous functions on an arbitrary interval. J. Comput. Appl. Math. 2011, 235, 3006–3014. [Google Scholar] [CrossRef]
- Sahu, D.R. Applications of the S-iteration process to constrained minimization problems and split feasibility problems. Fixed Point Theory 2011, 12, 187–204. [Google Scholar]
- Chugh, R.; Kumar, V.; Kumar, S. Strong convergence of a new three step iterative scheme in Banach spaces. Am. J. Comput. Math. 2012, 2, 345. [Google Scholar] [CrossRef] [Green Version]
- Karaca, N.; Yildirim, I. Approximating fixed points of nonexpansive mappings by a faster iteration process. J. Adv. Math. Stud. 2015, 8, 257–264. [Google Scholar]
- Abbas, M.; Nazir, T. A new faster iteration process applied to constrained minimization and feasibility problems. Mat. Vesnik 2014, 66, 223–234. [Google Scholar]
- Thakur, D.; Thakur, B.S.; Postolache, M. New iteration scheme for numerical reckoning fixed points of nonexpansive mappings. J. Inequal. Appl. 2014, 2014, 328. [Google Scholar] [CrossRef]
- Sintunavarat, W.; Pitea, A. On a new iteration scheme for numerical reckoning fixed points of Berinde mappings with convergence analysis. J. Nonlinear Sci. Appl. 2016, 9, 2553–2562. [Google Scholar] [CrossRef]
- Thakur, B.S.; Thakur, D.; Postolache, M. A new iterative scheme for numerical reckoning fixed points of Suzuki’s generalized nonexpansive mappings. Appl. Math. Comput. 2016, 275, 147–155. [Google Scholar] [CrossRef]
- Thakur, B.S.; Thakur, D.; Agarwal, R.P. Convergence theorems for total asymptotically nonexpansive mappings in CAT(0) spaces. J. Nonlinear Convex Anal. 2017, 18, 2059–2074. [Google Scholar]
- Ullah, K.; Arshad, M. New iteration process and numerical reckoning fixed points in Banach spaces. Politehn. Univ. Bucharest Sci. Bull. Ser. A Appl. Math. Phys. 2017, 79, 113–122. [Google Scholar]
- Ullah, K.; Arshad, M. Numerical reckoning fixed points for Suzukis generalized nonexpansive mappings via new iteration process. Filomat 2018, 32, 187–196. [Google Scholar] [CrossRef]
- Hussain, N.; Ullah, K.; Arshad, M. Fixed point approximation of Suzuki generalized nonexpansive mappings via new faster iteration process. J. Nonlinear Convex Anal. 2018, 19, 1383–1393. [Google Scholar]
- Ullah, K.; Arshad, M. New three-step iteration process and fixed point approximation in Banach spaces. J. Linear. Topological. Algebra. 2018, 7, 87–100. [Google Scholar]
- Piri, H.; Daraby, B.; Rahrovi, S.; Ghasemi, M. Approximating fixed points of generalized α-nonexpansive mappings in Banach spaces by new faster iteration process. Numer. Algorithms 2019, 81, 1129–1148. [Google Scholar] [CrossRef]
- Bhutia, J.; Tiwary, K. New iteration process for approximating fixed points in Banach spaces. J. Linear. Topological. Algebra. 2019, 8, 237–250. [Google Scholar]
- Garodia, C.; Uddin, I. A new fixed point algorithm for finding the solution of a delay differential equation. AIMS Math. 2020, 5, 3182–3200. [Google Scholar] [CrossRef]
- Garodia, C.; Uddin, I. A new iterative method for solving split feasibility problem. J. Appl. Anal. Comput. 2020, 10, 986–1004. [Google Scholar] [CrossRef]
- Ali, F.; Ali, J.; Nieto, J.J. Some observations on generalized non-expansive mappings with an application. Comput. Appl. Math. 2020, 39, 74. [Google Scholar] [CrossRef]
- Ali, J.; Ali, F. A new iterative scheme to approximating fixed points and the solution of a delay differential equation. J. Nonlinear Convex Anal. 2020, 21, 2151–2163. [Google Scholar]
- Hassan, S.; De la Sen, M.; Agarwal, P.; Ali, Q.; Hussain, A. A new faster iterative scheme for numerical fixed points estimation of Suzuki’s generalized nonexpansive mappings. Math. Probl. Eng. 2020, 2020, 3863819. [Google Scholar] [CrossRef]
- Rani, A.; Arti. A new iteration process for approximation of fixed points for Suzuki’s generalized non-expansive mappings in uniformly convex Banach spaces. J. Math. Comput. Sci. 2020, 10, 2110–2125. [Google Scholar]
- Ahmad, J.; Ullah, K.; Arshad, M.; Ma, Z. A New Iterative Method for Suzuki Mappings in Banach Spaces. J. Math. 2021, 2021. [Google Scholar] [CrossRef]
- Zeidler, E. Nonlinear Functional Analysis and Its Applications. I; Wadsack, P.E., Translator; Fixed-Point Theorems; Springer: New York, NY, USA, 1986; pp. xxi+897. [Google Scholar] [CrossRef]
- Khan, S.H. A Picard-Mann hybrid iterative process. Fixed Point Theory Appl. 2013, 2013, 69. [Google Scholar] [CrossRef]
- Ali, F.; Ali, J. Convergence, stability, and data dependence of a new iterative algorithm with an application. Comput. Appl. Math. 2020, 39, 267. [Google Scholar] [CrossRef]
- Hussain, A.; Ali, D.; Karapinar, E. Stability data dependency and errors estimation for a general iteration method. Alex. Eng. J. 2021, 60, 703–710. [Google Scholar] [CrossRef]
- Hussain, A.; Hussain, N.; Ali, D. Estimation of Newly Established Iterative Scheme for Generalized Nonexpansive Mappings. J. Funct. Spaces 2021, 2021, 6675979. [Google Scholar] [CrossRef]
- Shukla, R.; Pant, R.; Sinkala, W. A General Picard–Mann iterative method for approximating fixed points of nonexpansive mappings with applications. Symmetry 2022, 14, 1741. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Iterations | Initial Points | ||
|---|---|---|---|
| (0.3, 0.3) | (0.6, 0.6) | (0.9, 0.9) | |
| Case (i): , , | |||
| GPM with (27) | 26 | 25 | 27 |
| Bhutia and Tiwary (19) | 38 | 35 | 38 |
| Garodia and Uddin (20) | 35 | 33 | 36 |
| Garodia and Uddin, and Hussain et al. (D-iterative method) (21) | 35 | 33 | 36 |
| Hussain et al. (16) | 38 | 36 | 38 |
| Ullah and Arshad (17) | 53 | 49 | 53 |
| Piri et al. (18) | 52 | 49 | 53 |
| Ali et al. (23) | 35 | 33 | 36 |
| Rani and Arti (25) | 35 | 33 | 36 |
| Ahmad et al. (26) | 53 | 49 | 53 |
| Case (ii): , , | |||
| GPM with (27) | 25 | 24 | 26 |
| Bhutia and Tiwary (19) | 38 | 33 | 38 |
| Garodia and Uddin (20) | 33 | 31 | 34 |
| Garodia and Uddin, and Hussain et al. (D-iterative method) (21) | 33 | 31 | 34 |
| Hussain et al. (16) | 38 | 36 | 38 |
| Ullah and Arshad (17) | 48 | 45 | 48 |
| Piri et al. (18) | 48 | 45 | 49 |
| Ali et al. (23) | 33 | 31 | 34 |
| Rani and Arti (25) | 33 | 31 | 34 |
| Ahmad et al. (26) | 48 | 45 | 49 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shukla, R.; Panicker, R. Approximating Fixed Points of Nonexpansive Type Mappings via General Picard–Mann Algorithm. Computation 2022, 10, 151. https://doi.org/10.3390/computation10090151
Shukla R, Panicker R. Approximating Fixed Points of Nonexpansive Type Mappings via General Picard–Mann Algorithm. Computation. 2022; 10(9):151. https://doi.org/10.3390/computation10090151
Chicago/Turabian StyleShukla, Rahul, and Rekha Panicker. 2022. "Approximating Fixed Points of Nonexpansive Type Mappings via General Picard–Mann Algorithm" Computation 10, no. 9: 151. https://doi.org/10.3390/computation10090151
APA StyleShukla, R., & Panicker, R. (2022). Approximating Fixed Points of Nonexpansive Type Mappings via General Picard–Mann Algorithm. Computation, 10(9), 151. https://doi.org/10.3390/computation10090151