

Study on Optical Positioning Using Experimental Visible Light Communication System

 , , ,
, , , 
Abstract
:1. Introduction
2. Theoretical Analysis of the Model
3. Experimental Setup and Process
3.1. Experimental Radiation Pattern of LEDs
3.2. Positioning
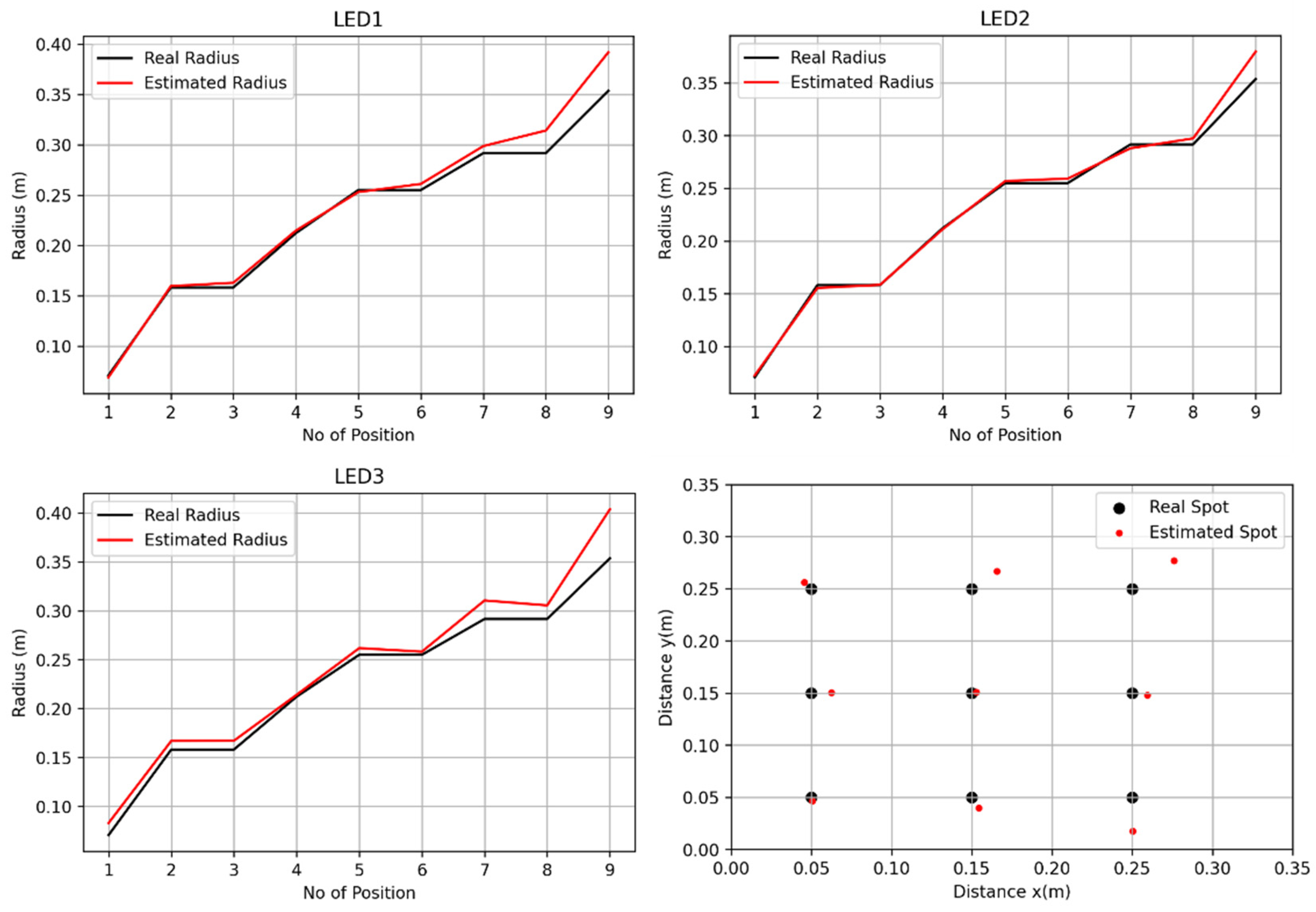
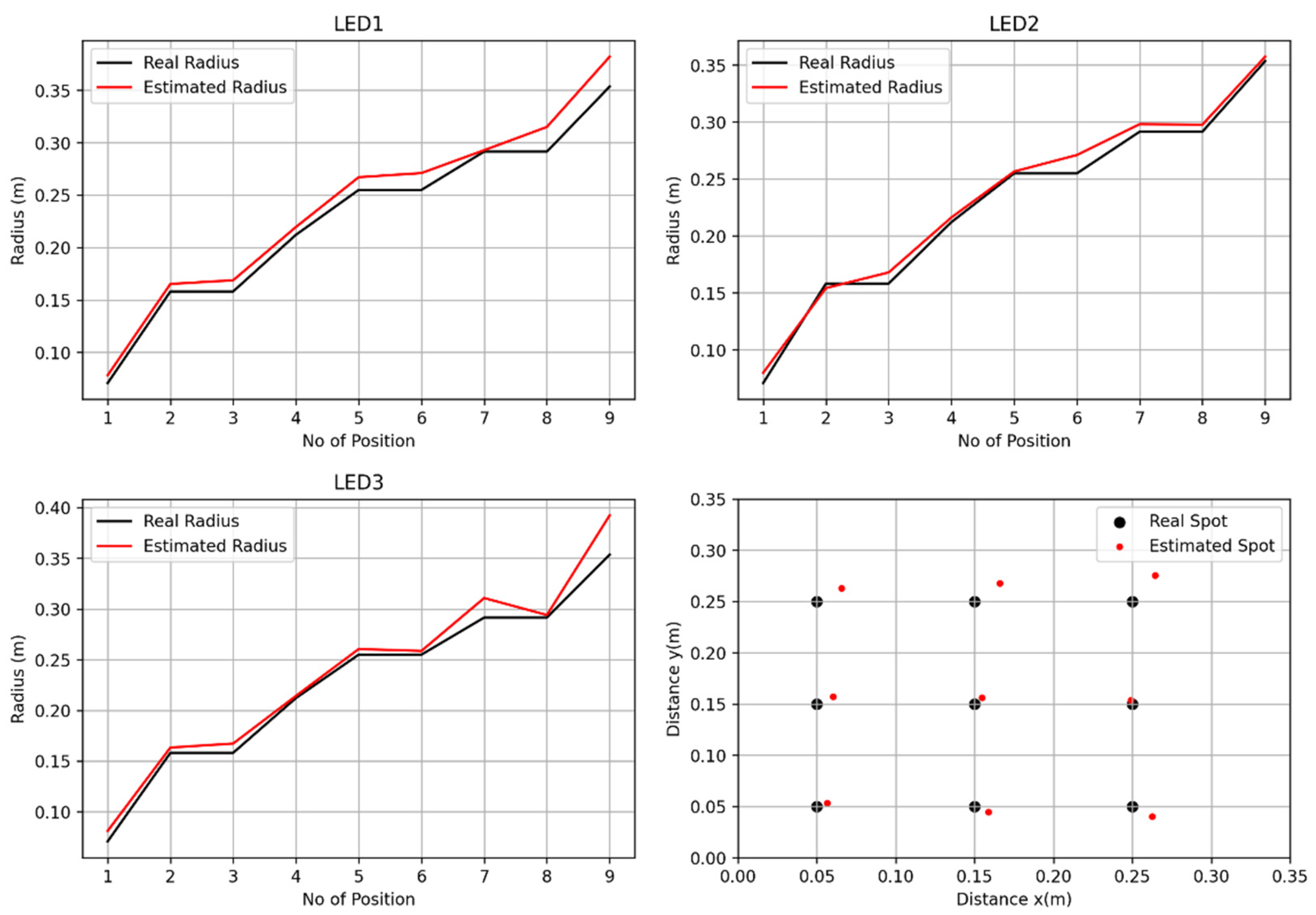
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Farid, A.A.; Hranilovic, S. Outage Capacity Optimization for Free-Space Optical Links with Pointing Errors. J. Light. Technol. 2007, 25, 1702–1710. [Google Scholar] [CrossRef]
- AlQuwaiee, H.; Ansari, I.S.; Alouini, M.-S. On the Performance of Free-Space Optical Communication Systems Over Double Generalized Gamma Channel. IEEE J. Sel. Areas Commun. 2015, 33, 1829–1840. [Google Scholar] [CrossRef]
- Jayasudha, S.; Bakkiyalakshmi, N.; Manju, M.; Sivabarani, R.; Subasridevi, M. Visible Light Communications For 5g Wireless Networking Technology. Adv. Nat. Appl. Sci. 2016, 10, 390–395. [Google Scholar]
- Manousou, D.K.; Stassinakis, A.N.; Syskakis, E.; Nistazakis, H.E.; Gardelis, S.; Tombras, G.S. Experimental Implementation and Theoretical Investigation of a Vanadium Dioxide Optical Filter for Bit Error Rate Enhancement of Enhanced Space Shift Keying Visible Light Communication Systems. Computation 2019, 7, 30. [Google Scholar] [CrossRef]
- Manousou, D.K.; Stassinakis, A.N.; Syskakis, E.; Nistazakis, H.E.; Tombras, G.S.; Volos, C.K.; Tsigopoulos, A.D. Estimation of the Influence of Vanadium Dioxide Optical Filters at the Performance of Visible Light Communication Systems. In Proceedings of the 2018 7th International Conference on Modern Circuits and Systems Technologies (MOCAST), Thessaloniki, Greece, 7–9 May 2018; IEEE: New York, NY, USA, 2018; pp. 1–4. [Google Scholar] [CrossRef]
- Menounou, S.; Stassinakis, A.N.; Nistazakis, H.E.; Tombras, G.S.; Sandalidis, H.G. Coverage Area Estimation for High Performance ESSK Visible Light Communication Systems. In Proceedings of the 2017 Panhellenic Conference on Electronics and Telecommunications (PACET), Xanthi, Greece, 17–19 November 2017; IEEE: New York, NY, USA, 2017; pp. 1–4. [Google Scholar] [CrossRef]
- Lin, B.; Ghassemlooy, Z.; Lin, C.; Tang, X.; Li, Y.; Zhang, S. An Indoor Visible Light Positioning System Based on Optical Camera Communications. IEEE Photonics Technol. Lett. 2017, 29, 579–582. [Google Scholar] [CrossRef]
- Chen, Y.; Zheng, H.; Liu, H.; Han, Z.; Ren, Z. Indoor High Precision Three-Dimensional Positioning System Based on Visible Light Communication Using Improved Hybrid Bat Algorithm. IEEE Photonics J. 2020, 12, 6802513. [Google Scholar] [CrossRef]
- Mautz, R.; Tilch, S. Survey of Optical Indoor Positioning Systems. In Proceedings of the 2011 International Conference on Indoor Positioning and Indoor Navigation, Guimaraes, Portugal, 21–23 September 2011. [Google Scholar]
- Elgala, H.; Mesleh, R.; Haas, H. Indoor Optical Wireless Communication: Potential and State-of-the-Art. IEEE Commun. Mag. 2011, 49, 56–62. [Google Scholar] [CrossRef]
- Wu, Y.-C.; Hsu, K.-L.; Liu, Y.; Hong, C.-Y.; Chow, C.-W.; Yeh, C.-H.; Liao, X.-L.; Lin, K.-H.; Chen, Y.-Y. Using Linear Interpolation to Reduce the Training Samples for Regression Based Visible Light Positioning System. IEEE Photonics J. 2020, 12, 7901305. [Google Scholar] [CrossRef]
- Beguni, C.; Done, A.; Căilean, A.-M.; Avătămăniței, S.-A.; Zadobrischi, E. Experimental Demonstration of a Visible Light Communications System Based on Binary Frequency-Shift Keying Modulation: A New Step toward Improved Noise Resilience. Sensors 2023, 23, 5001. [Google Scholar] [CrossRef]
- Keskin, M.F.; Gezici, S.; Arikan, O. Direct and Two-Step Positioning in Visible Light Systems. IEEE Trans. Commun. 2018, 66, 239–254. [Google Scholar] [CrossRef]
- Lin, P.; Hu, X.; Ruan, Y.; Li, H.; Fang, J.; Zhong, Y.; Zheng, H.; Fang, J.; Jiang, Z.L.; Chen, Z. Real-Time Visible Light Positioning Supporting Fast Moving Speed. Opt. Express 2020, 28, 14503. [Google Scholar] [CrossRef] [PubMed]
- Fang, J.; Yang, Z.; Long, S.; Wu, Z.; Zhao, X.; Liang, F.; Jiang, Z.L.; Chen, Z. High-Speed Indoor Navigation System Based on Visible Light and Mobile Phone. IEEE Photonics J. 2017, 9, 8200711. [Google Scholar] [CrossRef]
- Guan, W.; Chen, S.; Wen, S.; Tan, Z.; Song, H.; Hou, W. High-Accuracy Robot Indoor Localization Scheme Based on Robot Operating System Using Visible Light Positioning. IEEE Photonics J. 2020, 12, 7901716. [Google Scholar] [CrossRef]
- Guan, W.; Zhang, X.; Wu, Y.; Xie, Z.; Li, J.; Zheng, J. High Precision Indoor Visible Light Positioning Algorithm Based on Double LEDs Using CMOS Image Sensor. Appl. Sci. 2019, 9, 1238. [Google Scholar] [CrossRef]
- Lee, Y.U.; Baang, S.; Park, J.; Zhou, Z.; Kavehrad, M. Hybrid Positioning with Lighting LEDs and Zigbee Multihop Wireless Network. In Proceedings of the Broadband Access Communication Technologies VI, San Francisco, CA, USA, 24 January 2012; p. 82820L. [Google Scholar] [CrossRef]
- Do, T.-H.; Yoo, M. An In-Depth Survey of Visible Light Communication Based Positioning Systems. Sensors 2016, 16, 678. [Google Scholar] [CrossRef] [PubMed]
- Yang, S.-H.; Kim, H.-S.; Son, Y.-H.; Han, S.-K. Three-Dimensional Visible Light Indoor Localization Using AOA and RSS With Multiple Optical Receivers. J. Light. Technol. 2014, 32, 2480–2485. [Google Scholar] [CrossRef]
- Kim, H.-S.; Kim, D.-R.; Yang, S.-H.; Son, Y.-H.; Han, S.-K. An Indoor Visible Light Communication Positioning System Using a RF Carrier Allocation Technique. J. Light. Technol. 2013, 31, 134–144. [Google Scholar] [CrossRef]
- Wang, T.Q.; Sekercioglu, Y.A.; Neild, A.; Armstrong, J. Position Accuracy of Time-of-Arrival Based Ranging Using Visible Light With Application in Indoor Localization Systems. J. Light. Technol. 2013, 31, 3302–3308. [Google Scholar] [CrossRef]
- Jung, S.-Y.; Hann, S.; Park, C.-S. TDOA-Based Optical Wireless Indoor Localization Using LED Ceiling Lamps. IEEE Trans. Consum. Electron. 2011, 57, 1592–1597. [Google Scholar] [CrossRef]
- Ghassemlooy, Z.; Popoola, W.; Rajbhandari, S. Optical Wireless Communications System and Channel Modelling with 354 MATLAB; Taylor & Francis Group: Abingdon, UK; CRC Press: Boca Raton, FL, USA, 2013. [Google Scholar]
- Matta, G.; Bahl, R.; Agarwal, M. Capacity Analysis of Indoor Visible Light Communication Systems. In Proceedings of the 2019 Global LIFI Congress (GLC), Paris, France, 12–13 June 2019; IEEE: New York, NY, USA, 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Tronghop, D.; Hwang, J.; Jung, S.; Shin, Y.; Yoo, M. Modeling and Analysis of the Wireless Channel Formed by LED Angle in Visible Light Communication. In Proceedings of the International Conference on Information Network 2012, Bali, Indonesia, 1–3 February 2012; IEEE: New York, NY, USA, 2012; pp. 354–357. [Google Scholar] [CrossRef]
- Yang, S.-H.; Jung, E.-M.; Han, S.-K. Indoor Location Estimation Based on LED Visible Light Communication Using Multiple Optical Receivers. IEEE Commun. Lett. 2013, 17, 1834–1837. [Google Scholar] [CrossRef]
- Bhalerao, M.V.; Sumathi, M.; Sonavane, S.S. Line of Sight Model for Visible Light Communication Using Lambertian Radiation Pattern of LED. Int. J. Commun. Syst. 2017, 30, e3250. [Google Scholar] [CrossRef]
- Yang, H.; Bergmans, J.; Schenk, T.; Linnartz, J.; Rietman, R. An Analytical Model for the Illuminance Distribution of a Power LED. Opt. Express 2008, 16, 21641–21646. [Google Scholar]
- Ding, J.; Xu, Z.; Hanzo, L. Accuracy of the Point-Source Model of a Multi-LED Array in High-Speed Visible Light Communication Channel Characterization. IEEE Photonics J. 2015, 7, 14. [Google Scholar] [CrossRef]
- Ghassemlooy, Z.; Popoola, W.; Rajbhandari, S. Optical Wireless Communications, 2nd ed.; CRC Press: Boca Raton, FL, USA, 2018; Taylor & Francis Group: Abingdon, UK, 2019. [Google Scholar] [CrossRef]
- Maheepala, M.; Kouzani, A.Z.; Joordens, M.A. Light-Based Indoor Positioning Systems: A Review. IEEE Sens. J. 2020, 20, 3971–3995. [Google Scholar] [CrossRef]
- Fang, B.T. Trilateration and Extension to Global Positioning System Navigation. J. Guid. Control Dyn. 1986, 9, 715–717. [Google Scholar] [CrossRef]
- Plets, D.; Almadani, Y.; Bastiaens, S.; Ijaz, M.; Martens, L.; Joseph, W. Efficient 3D Trilateration Algorithm for Visible Light Positioning. J. Opt. 2019, 21, 05LT01. [Google Scholar] [CrossRef]
- Yang, B.; Guo, L.; Guo, R.; Zhao, M.; Zhao, T. A Novel Trilateration Algorithm for RSSI-Based Indoor Localization. IEEE Sens. J. 2020, 20, 8164–8172. [Google Scholar] [CrossRef]
- Ruiz, D.; Ureña, J.; García, J.C.; Pérez, C.; Villadangos, J.M.; García, E. Efficient Trilateration Algorithm Using Time Differences of Arrival. Sens. Actuators A Phys. 2013, 193, 220–232. [Google Scholar] [CrossRef]
- Doukhnitch, E.; Salamah, M.; Ozen, E. An Efficient Approach for Trilateration in 3D Positioning. Comput. Commun. 2008, 31, 4124–4129. [Google Scholar] [CrossRef]
- Morales-Céspedes, M.; Haas, H.; Armada, A.G. Optimization of the Receiving Orientation Angle for Zero-Forcing Precoding in VLC. IEEE Commun. Lett. 2020, 25, 921–925. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Transmitter | Receiver | ||
|---|---|---|---|
| Vcc | 24 V | Vc | 5 V |
| Rc | 50 Ω/100 Ω/150 Ω/200 Ω | R1 | 1 kΩ |
| Rb | 1 kΩ | R2 | 390 kΩ |
| BJT | BD139 | C | 47 nF |
| Vin | 5 V | ||
| PL = 1.5 W | PL = 0.8 W | |||||
|---|---|---|---|---|---|---|
| y = 0 m | y = 0.1 m | y = 0.15 m | y = 0 m | y = 0.1 m | y = 0.15 m | |
| LED1 | 0.175 | 0.172 | 0.171 | 0.095 | 0.093 | 0.095 |
| LED2 | 0.17 | 0.175 | 0.18 | 0.091 | 0.096 | 0.094 |
| LED3 | 1.165 | 0.172 | 0.175 | 0.095 | 0.092 | 0.097 |
| Height | PL | Noise | |
|---|---|---|---|
| Case 1 | 0.22 m | 1.5 W | Low |
| Case 2 | 0.26 m | 1.5 W | Low |
| Case 3 | 0.26 m | 0.8 W | Low |
| Case 4 | 0.26 m | 0.8 W | High |
| Case 1 | Case 2 | Case 3 | Case 4 | |
|---|---|---|---|---|
| RMSE LED 1 | 0.0155 | 0.0062 | 0.1177 | 0.0151 |
| RMSE LED 2 | 0.0094 | 0.0036 | 0.0075 | 0.0079 |
| RMSE LED 3 | 0.0193 | 0.0112 | 0.0103 | 0.0154 |
| RMSE x axis | 0.0111 | 0.0079 | 0.0096 | 0.0112 |
| RMSE y axis | 0.0153 | 0.0068 | 0.0097 | 0.0123 |
| MAE LED1 | 0.0083 | 0.0044 | 0.0092 | 0.0127 |
| MAE LED2 | 0.0032 | 0.0001 | 0.0054 | 0.0059 |
| MAE LED 3 | 0.0143 | 0.0091 | 0.0079 | 0.0107 |
| MAE x axis | 0.0072 | 0.0061 | 0.0072 | 0.0097 |
| MAE y axis | 0.0002 | 0.0007 | 0.0056 | 0.0068 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vitsi, N.; Stassinakis, A.N.; Androutsos, N.A.; Roumelas, G.D.; Varotsos, G.K.; Aidinis, K.; Nistazakis, H.E. Study on Optical Positioning Using Experimental Visible Light Communication System. Computation 2023, 11, 161. https://doi.org/10.3390/computation11080161
Vitsi N, Stassinakis AN, Androutsos NA, Roumelas GD, Varotsos GK, Aidinis K, Nistazakis HE. Study on Optical Positioning Using Experimental Visible Light Communication System. Computation. 2023; 11(8):161. https://doi.org/10.3390/computation11080161
Chicago/Turabian StyleVitsi, Nikoleta, Argyris N. Stassinakis, Nikolaos A. Androutsos, George D. Roumelas, George K. Varotsos, Konstantinos Aidinis, and Hector E. Nistazakis. 2023. "Study on Optical Positioning Using Experimental Visible Light Communication System" Computation 11, no. 8: 161. https://doi.org/10.3390/computation11080161
APA StyleVitsi, N., Stassinakis, A. N., Androutsos, N. A., Roumelas, G. D., Varotsos, G. K., Aidinis, K., & Nistazakis, H. E. (2023). Study on Optical Positioning Using Experimental Visible Light Communication System. Computation, 11(8), 161. https://doi.org/10.3390/computation11080161