1. Introduction
We develop approaches to remedy the incompleteness of abstract interpretation [
1] of linear equation systems over the reals, in the algebra of booleans
and the structure of signs
. These abstractions have various applications: in systems biology, the boolean abstraction underlies abstractions of chemical reactions networks into Boolean networks [
2,
3]. In program analysis, the sign abstraction can be applied to functional programs with arithmetics for analyzing the signs of the possible values of floating-point variables [
4,
5].
The soundness of abstract interpretations of first-order logic formulas without negation was shown by John [
6,
7,
8,
9]. It applies to the interpretation in any concrete structure
S, as long as it is connected by a homomorphism
to the abstract structure
. The concrete interpretation of a first-order formula
is the set of concrete solutions
, and its abstract interpretation is the set of its abstract solutions
. John’s soundness theorem (see Theorem 1 below) states that the set of abstract solutions of overapproximates the abstraction by
h of the set of concrete solutions:
When choosing the operators in , the class of negation-free first-order formulas with operators in extends on the classes of linear and polynomial equation systems. In this article, we consider the boolean abstraction which is the unique homomorphism , and the sign abstraction which is the unique homomorphism with respect to the operators in . The boolean abstraction maps any strictly positive real to 1 and 0 to 0. The sign abstraction extends on the boolean abstraction while mapping all strictly negative reals to . We note that the structure of signs is not an algebra since the sum of a positive and a negative number may have any sign.
1.1. Problematics
A natural question is whether abstract interpretation is complete [
10] for the abstraction of formulas induced by a homomorphisms
, i.e, whether for all negation-free first-order formulas
with the same operators:
We call a formula h-exact if it satisfies this property. A counter example against the completeness of abstraction interpretation for the boolean and the sign abstraction is the linear equation equal to . Here, we write for the equality symbol inside the logic, to point out its difference from equality in the language of mathematics. Formula is neither -exact nor -exact. This can be seen as follows. Over the reals is equivalent to , so that all assignments that are abstractions of concrete solutions of must satisfy . When interpreted abstractly over or , however, admits the abstract solution which is not the abstraction of any concrete solution since .
To deal with the incompleteness of abstract interpretation, we propose to study the following two questions for homomorphism where h is either the boolean abstraction or the sign abstraction .
Exact Rewriting Can we rewrite linear equation systems to h-exact formulas?
Computing Abstractions Can we can compute the abstraction exactly for a given system of homogeneous linear equations ?
Geometrically speaking, the concrete solution sets and of homogeneous linear equation systems are polytopes—i.e., finite intersections of half-spaces in . The problem of computing boolean abstractions or sign abstraction is thus to compute the abstraction of a polytope given by a linear equation system.
For any
h-exact formula
, the computation of abstractions
is equivalent to the computation of
. Since the abstract structure
is finite for the boolean and sign abstraction, we can compute the set of abstract solutions in at most exponential time by a naive generate and test algorithm. Finite domain constraint programming [
11] can by used to avoid the naive generation of all variable assignments to
in many practical cases. Therefore, any algorithm for exact rewriting induces an algorithm for computing abstractions that may be feasible in practice.
1.2. Contributions
Our main result is the first algorithm for exact rewriting that applies to linear equation systems for the Boolean abstraction. Based on this algorithm, we present a novel algorithm for computing the sign abstraction of linear equation systems.
Exact Rewriting for the Boolean Abstraction. In the first step, we study exact rewriting of (homogeneous) linear equation systems for boolean abstraction. The counter example
, for instance, can be rewritten to
-exact formula
. The idea is to take the system of all linear consequences over
of the linear equation system. There may be infinitely many such consequences, but all of them are linear combinations of the extreme rays of the cone
. Up to normalization, there are only finitely many extreme rays, which are known as the elementary modes of the linear equation system [
12,
13,
14,
15]. These can be computed by libraries from computational geometry [
16] in at most exponential time. Nevertheless, the computation is often well-behaved in practice.
Based on the elementary modes (Folklore Theorem 2), we can rewrite any (homogeneous) linear equation system into quasi-positive and strongly-triangular linear equation system that is equivalent over (Corollary 1), that can be computed in at most exponential time. As we prove, such systems are always -exact (Theorem 3). Hence, any system of linear equations can be converted in at most exponential time to some -equivalent -exact formula.
Note that -exact formulas may still not be -exact. A counter example is the strongly-triangular quasi-positive linear system . It is not -exact, since it entails over but still has the abstract solution over which maps x and y to distinct signs. Indeed, we don’t have any idea of how to do exact rewriting for the sign abstraction. The problem is that positivity is essential for our approach, and since the addition of positive and negative numbers may have any sign, fails to be an algebra, making the analogous argument as in the proof of -exactness fail.
Extension to -Mixed Systems. In the second step, we introduce -mixed systems, which by Theorem 4 generalize on systems of 1. linear equations, 2. positive polynomial equations , and 3. positive polynomial inequations , where p is a positive polynomial without constant term. We then show our main result:
Theorem 5 (Main). Any -mixed systems can be converted to a -exact formula by converting its linear subsystem to an -exact formula.
The correctness of the algorithm for -mixed systems relies on the notion of -invariant formulas that we introduce. The class of -invariant formulas subsume systems of positive polynomial equations and inequations , where p is a positive polynomials without constant terms.
Computing Sign Abstractions. In the third step, we present an algorithm for computing the sign abstraction of (homogeneous) systems of linear equations based on exact rewriting for the boolean abstraction (Theorem 6). For this, we decompose the sign abstraction into the boolean abstraction based on a function that is definable in first-order logic. This function decomposes real numbers into their positive part x and negative part y. At least one of these two parts must be zero, which can be expressed by the polynomial equation . The positivity of x can be expressed by and the positivity of y in analogy. In this way, we can reduce the problem of computing to the problem of computing for some existentially quantified -mixed system that we can make -exact based on our main Theorem 5.
Application to Program Analysis. We show how to apply the computation of the sign abstraction of linear equation systems to improve the analysis of functional programs with arithmetics. For finding program errors there it can be useful to know about the possible signs of the values of program variables. We elaborate an example in the final
Section 10.
Implementation. We implemented the
-exact rewriting algorithm for
-mixed systems from the main Theorem 5 in Python. For this we used a library from computational geometry [
16] for computing elementary modes. We also used finite domain constraint programming with Minizinc [
17] for computing the set of boolean solutions over logical formulas. Some successful experiments are mentioned in the related work subsection below. We did not yet implemented the algorithm for computing sign abstractions, nor its application to program analysis though.
1.3. Related Work
We start with related work by the authors, and then move to related work by others.
Change Prediction of Reaction Networks. Our main Theorem 5 was recently applied to the change prediction of reaction networks in systems biology [
6]. Indeed, the development of the present article was originally motivated by this application. The problem there is to compute the difference abstraction of linear equation systems, expressing the steady state semantics of chemical reaction networks. Two difference abstractions were considered,
and a refinement thereof
. In analogy to the approach adopted for computing sign abstractions (step three above), the algorithmic approach presented there is to decompose the difference abstractions
and
into the boolean abstraction
and functions that are definable in first-order logic. The elaboration of this approach, however, is quite different for reflecting the nature of the difference abstractions.
Experimentation. We tested our implementation of the exact rewriting algorithm for the boolean abstraction successfully for computing difference abstractions in the application of change prediction in systems biology. The experimental results are presented in [
6] are generally encouraging. They show that
-exact rewriting based on elementary modes in combination with finite domain constraint programming may indeed avoid naive generate and test in many practical examples. In some of these examples, however, the overall computation time still took some hours.
Abstracting Reaction Networks to Boolean Networks. Independently, the authors proposed an abstraction of chemical reaction networks to boolean networks in [
18], whose precision can be improved by using the
-exact rewriting of
-mixed equation systems.
Alternative Algorithm for Computing Sign Abstractions. An alternative algorithm for computing the sign abstraction of linear equation systems (and thus also the boolean abstraction) can be obtained by John’s overapproximation Theorem 1. It shows that it is sufficient to generate the finitely many abstract solutions in
, and then to check for each of them whether there exists a concrete solution
such that
. To perform this latter test, note that
is equivalent to the strict inequation
and
by the equation
. Similarly,
can be defined by the strict inequation
. Whether there exists a concrete solution
such
is thus equivalent to the satisfiability of
over
, where
is the set of free variables of
. The satisfiability of systems of strict linear inequations and homogeneous linear equations without constant terms over
are known to be decidable since at least 1926 [
19]. But still, one has to generate the set of all abstract solutions
. The new algorithm presented above avoids generating this set.
Abstract Program Interpretation over Numerical Domains. In abstract interpretation [
20], nonrelational domains permit to approximate the set of values of program variables while ignoring the relationship to the values of others. Well-known nonrelational numerical domains include the interval domain [
21] describing invariants of the form
with reals
and the constant propagation domain for invariants of the form
[
22].
Abstract interpretation of relational domains may yield better approximations that with nonrelational domains, since relationships between the values of different variables can be taken into account. Well-known relational numerical domains include the polyhedral domain [
4]. A polyhedron is the solution set of systems of inhomogeneous linear inequations of the form
. Alternatively, the linear equality domain [
23] was considered. These are defined by system of inhomogeneous linear equations
.
In the present paper, we study the problem of computing the sign abstraction of polytopes represented by homogeneous linear equation systems. The polytopes can be obtained by existing methods for the abstract program interpretation over the polyhedral domain. One weakness of our approach is that we study the homogeneous case only, so that we can only abstract polytope and not more general polyhedrons.
1.4. Outline
In
Section 2, we recall preliminaries on homomorphisms between
-structures. In
Section 3, the first-order logic is recalled. John’s theorem and its relation to the soundness and completeness of abstract interpretation in the classical framework are discussed in
Section 4. We discuss how to make linear equation system quasipositive and strongly triangular based on elementary modes in
Section 5. These properties can be used to prove
-exactness as we show in
Section 6, and thus to obtain an
-exact rewriting of linear equation systems. We introduce the notion of
-invariance in
Section 7 and apply it in
Section 8 to lift the
-exact rewriting algorithm from linear to
-mixed systems. This allows us to define the sign abstraction of linear equation systems on
Section 9. We finally apply this result in
Section 10 to the sign analysis of functional programs with arithmetic.
2. Homomorphisms on -Structures
We need some basic notation from set theory and standard notion of universal algebra such as -algebras, -structures, and homomorphism.
For any set A and , the set of n-tuples of elements in A is denoted by . For finite sets A the number of elements of A is denoted by . Furthermore, for any function we define the function such that for all .
2.1. -Algebras
We next recall the notion of -algebras. Let be a ranked signature. We call the elements of are called n-ary function symbols, even though we may also use them as -ary relation symbols later on when moving to -structures. The elements in are called the constants of .
Definition 1. A-algebra consists of a set and an interpretation such that for all , and for all .
Let be the set of booleans, the set of natural numbers including 0, the set of integers, the set of real numbers, and the set of positive real numbers including 0. Note that and . Let the addition on the reals be the binary function and the multiplication the binary function . Let the addition on the positive real numbers be equal to the restriction and the multiplication be the restriction .
Let be the set of boolean operators where + and * are binary function symbols and 0 and 1 constants. Note that constant 0 is freely overloaded with the boolean 0 and the constant 1 with the boolean 1.
Example 1. The set of positive reals can be turned into a -algebra, in which the functions symbols are interpreted as binary functions and . The constants are interpreted by themselves and .
Example 2. The set of Booleans equally defines a -algebra. There, the function symbols are interpreted as a disjunction and conjunction on Booleans. The constants are interpreted by themselves and .
2.2. -Structures
We next recall the usual generalization of -algebras to -structures. The objective is to generalize from functions to relations. For this, we consider n-ary function symbols as -ary relation symbols.
Definition 2. A-structure consists of a set and an interpretation such that for all and for all .
Clearly, any -algebra is also a -structure. Note also that symbols in are interpreted as monadic relations, i.e., as subsets of the domain, in contrast to constants in C that are interpreted as elements of the domain.
We denote the subtraction on the reals by the binary function and the division on the reals by the ternary relation . Note that division by zero is undefined. Note also that subtraction on would yield only a partial function.
Let be the arithmetic signature, where 0 and 1 are constants, and all other operators are binary function symbols. Again, we freely overlead to constant 0 with real number 0 and the constant 1 with the real number 1.
Example 3. The set of reals can be turned into a -structure, with the interpretation of the binary functions symbols as the ternary relations , , , . The constants are interpreted by themselves and . Note that is a partial but not a total function, since division by 0 is not defined. So we must see as a ternary relation, so that is not a -algebra. It still is a -algebra though.
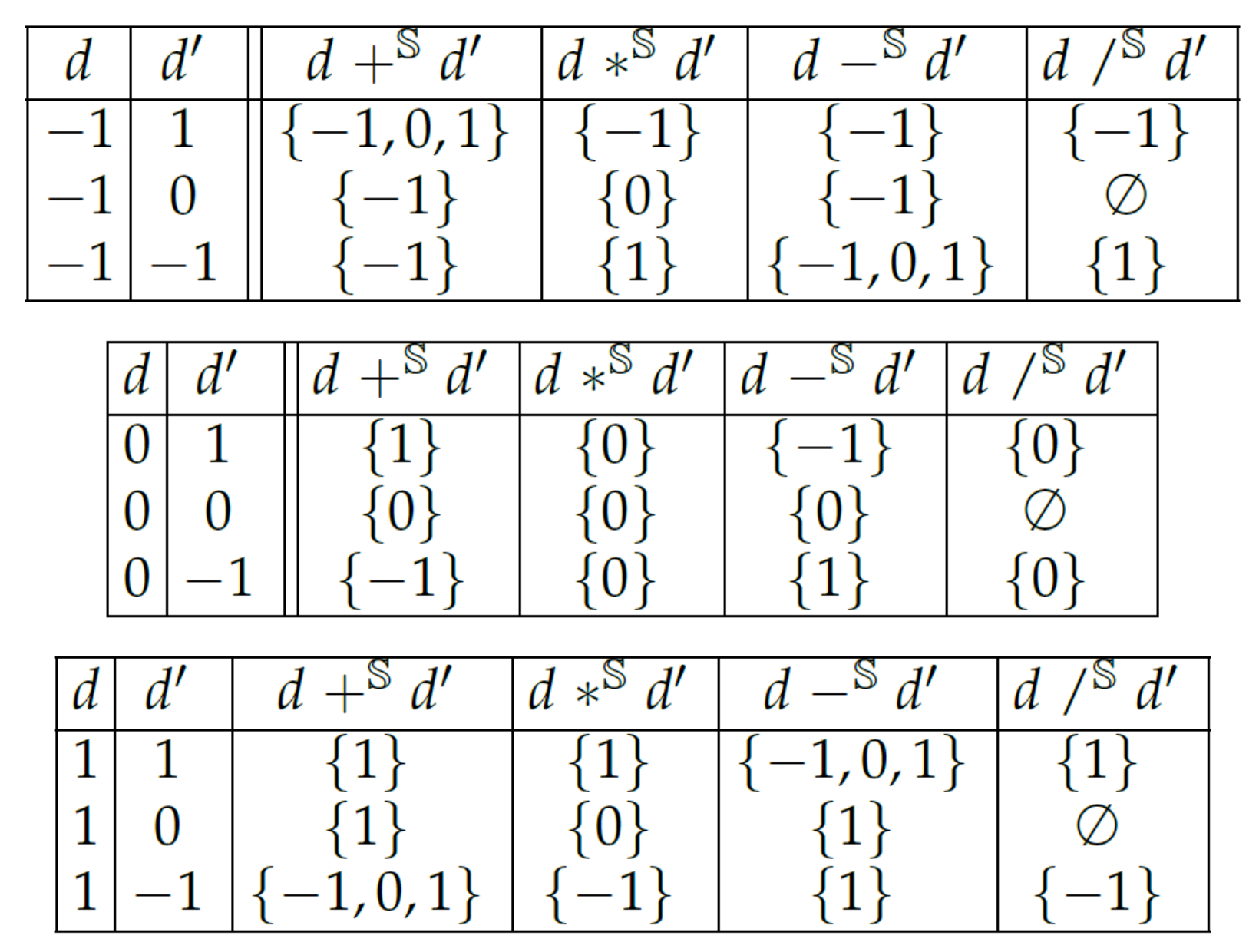
Example 4. The set of signs can be turned into a -structure with the interpretation , , and, given in Figure 1. The constants are interpreted by themselves and . Note that all contains , and meaning that the sum of a strictly negative and a strictly positive real has a sign in , so it may either be strictly positive, strictly negative, or zero. So is a -structure and even when restricting the signature to it remains a -structure that is not a -algebra. 2.3. Homomorphisms
We recall the standard notion of homomorphism for -structures which can also be applied to -algebras.
Definition 3. A homomorphism between two Σ-structures S and Δ is a function such that for , , , and :
- 1
, and
- 2
if then .
We can convert any -ary relation to a n-ary set valued functions. In this way, any n-function is converted to a n-ary set valued n-functions. In other words, functions of type are converted to functions of type where . In set-valued notation, the second condition on homomorphism can then be rewritten equivalently as . A homomorphism for -algebras thus satisfies and for all function symbols and it satisfies
The boolean abstraction is the function with and if .
Lemma 1. The boolean abstraction is a homomorphism between -algebras.
Proof. For all
we have:
Hence,
and
. Finally, for both constants
we have that
. □
The sign abstraction is the function with , for all strictly negative reals and for all strictly positive reals .
Lemma 2. The sign abstraction h𝕊 is a homomorphism between -structures.
Proof. Let . For the multiplication we have and thus . For the addition, we have to distinguish cases. If r and have the same sign, so has the same sign, so that we have . If and or vice versa then we have so that . The treatment of and is similar. For the constants, we have and . □
3. First-Order Logic
We recall the syntax and semantics of first-order logic with equality. For this, we fix a countably infinite set of variables that will be ranged over by .
3.1. Expressions
Given a ranked signature with constants and function symbols
, the set of
-expressions contains all terms that can be constructed from constants and variables by using function symbols:
| | | ::= | where , , ,
|
Let be the set of all variables that occur in e. Given a subset let be the subset of expression with .
The semantics of
-expressions is defined in
Figure 2. For any
-structure
S and variable assignment
, any expression
denotes a set of values
. This set is defined recursively by set-valued interpretation of the operators of the expressions in the structure
S. If
S is a
-algebra, then the result will always be a singleton.
3.2. Logic Formulas
The set of first-order formulas is the set of terms constructed with the usual first-order connectives from equations with symbols in
and variables in
:
| | | ::= | where and |
A -formula is a term, which either is a -equation with variables in , an existentially quantified formula , a conjunction , or a negation . A system of -equations is a conjunction of equations where .
The set of free variables contains all those variables of that occur outside the scope of any existential quantifier in . Given a subset we write for the subset of formulas such that .
First-order formulas can be defined for providing the missing logical operators. Firstly, we can define disjunctions and implications , and secondly, universally quantified formulas . Note that these formulas are not negation-free (and thus John’s theorem cannot be applied to them). Third, we define the valid formula . Fourth, we write instead of . In the case the conjunction is . Fifth, for any vector of variables we will write instead of .
For any
, the semantics of first-order formulas
for a
-structure
S and a variable assignment
is the truth value
defined in
Figure 3.
Note that the equality symbol is interpreted as nondisjointness, i.e., an equation is true if and only if . In the case of -algebras, the equality symbol is indeed interpreted as equality of singletons. In the case of more general -structures, though, it is not interpreted as set equality.
The set of solutions with domain
V of a formula
over a
-algebra
S is:
If
we omit the index
V, i.e.,
.
Two formulas are called S-equivalent if they have the same solution sets over S on , that is . Note that is equivalent to and also to , i.e., to .
3.3. Examples
Since
we can define the boolean abstraction by a formula
in
over
with two variables
:
Since
we can define the sign abstraction by a formula
in
over
with two variables
:
where:
These definitions illustrate that both abstraction are closely related to strict inequations and . The boolean abstraction is concerned with strict positivity , while the sign abstraction is also concerned with strict negativity .
3.4. Semantic Properties of Free and Bound Variables
We need the following two standard lemmas on the role of free and bound variables for the solution sets of logic formulas. For any subset of variable assignments R of type and any disjoint sets of variables we define .
Lemma 3 (Cylindrification). If then .
Proof. We can show that for all expressions with disjoint to V and any variable assignment by induction on the structure of expressions. From this, we can prove for all formulas such that is disjoint from V and that by induction on the structure of -formulas. This implies the lemma. □
The projection of a function is its restriction . The projection of a set F of functions is .
Lemma 4 (Quantification is projection). .
Proof. This is follows from the semantics of existential quantified formulas as follows:
□
5. Equation Systems, Positivity, and Triangularity
We study systems of -equations for positivity and triangularity. These notions will be essential for showing -exactness. We are not only interested in homogeneous linear equations but also in more general polynomial equations without constant term.
5.1. Classes of Equation Systems
Let
be a sequence of expressions and
. If
we define
and
. For
, we define
and
. Furthermore, for any expression
we define:
A
polynomial (with natural coefficients) is a
-expression of the following form:
where
l and
are natural numbers,
variables, all
are natural numbers called the
coefficients, and all
are natural numbers called the
exponents. The products
are called the
monomials of the polynomial.
Definition 7. A polynomial with natural coefficients has no constant term if none of its monomials are equal to 1, i.e., for all . It is linear if all its monomials are variables, i.e., and for all .
A polynomial equation is a -equation between polynomials. A polynomial equation system is a system of polynomial equations.
Linear polynomials have the form where l and all are naturals and all are variables. In particular, linear polynomials do not have a constant term. Note that the constant 0 is equal to the linear polynomial with . A (homogeneous) linear equation is a polynomial equation with linear polynomials, so without constant terms. A (homogeneous) linear equation system is a system of linear equations.
A
(homogeneous) integer matrix equation has the form
where
A is a
matrix of integers for some naturals
such that
and
. Any integer matrix equation can be turned into a linear equation system with natural coefficients, by bringing the negative coefficients positively on the right-hand side. For instance, the linear integer matrix equation:
corresponds to the following system of linear
-equations:
Therefore, we will sometimes confuse an integer matrix equations with the corresponding system of linear -equations. Conversely, any system of linear -equations can be converted into a integer matrix equation by moving the positive right-hand sides negatively to the left and factorizing the expressions for the different occurrences of the same variable.
5.2. Positivity and Triangularity
such that We next define positivity and triangularity properties for equation systems. These are key properties to show -exactness of linear equation systems.
Definition 8. A -equation is called positive if it has the form and quasi-positive if it has the form , where , , and . We call a system of -equations positive respectively quasi-positive if all its equations are.
This definition makes sense, since all constants in -expressions are positive and all operators of -expressions preserve positivity. Note also that any positive equation is quasipositive since the constant 0 is equal to the polynomial .
This above system of linear equations is quasipositive, but not positive since appears on a right-hand side. More generally, the linear equation system for a integer matrix equation is positive if and only if all integers in A are positive, and quasipositive if each line of A contains at most one negative integer.
Definition 9. We call a quasipositive system of -equations triangular if it has the form such that the variables are l-fresh for all , i.e., and if then . We call the quasi-positive polynomial system strongly-triangular if it is triangular and satisfies for all .
The above linear equation system is triangular, but not strongly triangular since the right-hand side of the first equation is 0. Consider an integer matrix equation . If A is positive and triangular, then the corresponding linear equation system is positive and triangular too. For being quasipositive and strongly-triangular, the integers below the diagonal of A must be negative, those on the diagonal must be strictly negative, and those on the right of the diagonal must be positive.
5.3. Linear Equation Systems and Elementary Modes
We next show that elementary modes [
12,
13,
14,
15] can be used to transform systems of linear equations into
-equivalent systems that are
quasi-positive and
strongly-triangular.
We first recall the necessary definitions and folklore results on elementary modes and the double description method. We limit the presentation to equations with integer coefficients solved in , since more general definitions and results for elementary modes in are not needed for this paper.
Definition 10. The support of a function is .
Definition 11 (Elementary Modes). An elementary mode of an integer matrix is a vector such that for any sequence of pairwise distinct variables the function is a solution in such that:
is minimal, i.e., there exist no such that ,
σ is normalized, i.e., there exist variables in such that and are coprimes (their greatest common divisor is 1).
The elementary modes of a matrix A are the extreme directions of the polyhedral cone . This implies that any solution of the linear system can be expressed as a weighted sum of its elementary modes, where all the weights are non negative. Due to normalization, the number of elementary modes is finite for all integer matrices.
Theorem 2 (Folklore). For any integer matrix one can compute a matrix of natural numbers in at most exponential time, such that the -formulas for and are -equivalent for all vectors and of pairwise distince variables. Furthermore, the o columns of E are the elementary modes of A.
We note that Theorem 2 can be lifted to matrices of rational numbers
, since any rational matrix equation
can be rewritten to a integer matrix equation with the same
-solution set, by multiplying with the natural numbers in the denominators of the rational numbers. The freely available cddlib tool in the rational mode [
24] inputs a matrix
, and outputs the list of (integer) elementary modes of
A. From this list, we can construct the matrix
E for
A by aligning the elementary modes of
A as the columns of
E.
Note that the interface of the cddlib tool is more general, in that it applies to rational matrix inequations interpreted over the reals, rather than to rational matrix equations interpreted over the positive reals: it permits to compute the normalized extreme directions of the polyedral cone for any rational matrix inequation B over the reals. If one wants to compute the elementary modes of a rational matrix A – that is the normalized extreme directions of polyhedral cones of over the positive reals – then one can chose where is the identity matrix with as many columns as A.
Corollary 1 (Elementary Mode Rewriting). Given a system of linear equations , one can compute in at most exponential time an -equivalent formula that has the form where is quasi-positive and strongly-triangular system of equations.
Proof. Any system of linear equations can be converted into some integer matrix equation where is a vector that contains all variables in exactly once. Let E be a matrix of elementary modes of A from Theorem 2. This theorem states that and thus is -equivalent to for some vector of fresh variables . So let be and be . Since all entries of E are positive, the variables in are pairwise distinct, and the variables in are chosen freshly, it follows that is both quasi-positive and strongly-triangular. □
We have implemented the elementary mode rewriting in Python based on the cddlib tool, and plan to make our tool publically available soon. An example input is the system of linear
-equations
given in
Figure 4. The corresponding integer matrix equation system is given there too. The elementary modes of the matrix of this system are the vectors
and
. When putting these vectors in the columns of a new matrix, our tool returns the elementary mode rewriting
in
Figure 5.
6. -Exact Rewriting of Linear Equation Systems
Our next objective is to study the preservation of h-exactness by logical operators. The main difficulty of this paper is the fact that h-exactness is not preserved by conjunction. Nevertheless, as we will show next, it is preserved by disjunction and existential quantification.
To do so we first show that h-exactness is preserved when adding variables. For this, we have to assume that the -abstraction h is sujective, which will be the case of all -abstractions of interest.
Lemma 6 (Variable extension preserves exactness). Let be a Σ-abstraction that is surjective and a formula. Then the h-exactness of ϕ implies the h-exactness of ϕ with respect to V.
Proof. This follows from that abstractions of solutions of can be extended arbitrarily to variables that do not appear freely in as stated by the following claim.
Claim 1. For all : iff .
For the one direction let . Then, there exists such that . Since it follows that . Furthermore and thus .
For the other direction let . Then, there exists such that . For any let be such that . Such values exists since h is surjective. Now define . Since it follows that . Furthermore, , so . □
For the case of disjunction, we need a basic property of unions (joins) which fails for intersections (meets).
Lemma 7 (Abstraction
preserves joins).
Let V be a set of variables, and be subsets of assignments of type and be a Σ-abstraction. Then: Proof. This lemma follows from the following equivalences:
□
Proposition 1. The disjunction of h-exact formulas is h-exact.
Proof. Let
and
be negation free formulas that are
h-exact. Let
. Lemma 6 shows that
and
are also
h-exact with respect to the extended variable set
V, i.e., for both
:
The
h-exactness of the disjunction
can now be shown as follows:
□
Lemma 8 (Projection commutes with abstraction). For any Σ-abstraction , subset R of assignments of type , and variable : .
Proof. For all we have . □
Proposition 2 (Quantification preserves exactness). For any surjective Σ-abstraction and formula , if ϕ is h-exact then is h-exact.
Proof. Let
be
h-exact. By definition
is
h-exact with respect to
. Since
h is assumed to be surjective, Lemma 6 implies that
is
h-exact with respect to
(independently of whether
x occurs freely in
or not). Hence:
□
We next study the h-exactness for strongly-triangular systems of -equations, under the condition that h is an abstraction between -algebras with unique division (see Definition 12).
Lemma 9 (Singleton property). If S is a Σ-algebra, , and a variable assignment, then the set is a singleton.
Proof. By induction on the structure of expressions :
Case of constants . The set is a singleton.
Case of variables . The set is a singleton.
Case where
and
.
This set is a singleton since are singletons by induction hypothesis, meaning that is also a singleton since S is a -algebra. □
A -algebra is a -structure with the singleton property. Let be the function that maps any singleton to the element that it contains.
Definition 12. We say that a -structure S has unique division if it satisfies the first-order formula for all nonzero natural numbers .
Clearly, the -structures , , and have unique division. Note, however, that is not a -algebra, so that the following two Propositions 3 and 4 cannot be applied to instead of .
For any element s of the domain of a -structure S with unique division and any nonzero natural number , we denote by the unique element of .
Lemma 10. Let be a formula and S a -algebra with unique division. For nonzero natural number n, variable , and expression : Proof. We fix some arbitrarily. Since S is a -algebra, is a singleton and , is defined uniquely. Furthermore S has unique division, so that is a well-defined element of . Therefore and since , is the unique solution of the equation that extends on .
Firstly, we prove the inclusion “⊇”. Let , , and is a solution of , it follows that is a solution of .
Secondly, we prove the inverse inclusion “⊆”. Let . Since is the unique solution of the equation that extends on it follows that so that while . □
Proposition 3. Let a formula, a natural number, an expression, , and a -abstraction between -algebras with unique division. Under these conditions, if ϕ is h-exact then is h-exact.
Proof. Let an expression. □
Claim 2. For any : .
This can be seen as follows. For any Theorem 1 on homomorphism yields . Since S and are both -algebras, the sets and are both singletons by Lemma 9, so that .
Claim 3. For any and a natural number: .
Since S is assumed to have unique division is well-defined as the unique element of such that . Hence, and since h is a homomorphism, it follows that . Since is assumed to have unique division, this implies that .
The Proposition can now be shown based on these two claims. Let
be
h-exact,
, and
. We have to show that
is
h-exact too:
Proposition 4. Let be a -abstraction between algebras with unique division. Then any strongly-triangular system of -equations is h-exact.
Proof. Any strongly-triangular system of equations has the form where n and are naturals and is i-fresh for all . The proof is by induction on n. In the case , the conjunction is equal to which is h-exact since . In the case , we have by induction hypothesis that is h-exact. Since it follows from Proposition 3 that that is h-exact. □
We notice that Proposition 4 remains true for triangular systems that are not strongly-triangular. This follows from results that we can only present in the next section (Theorem 4 and Proposition 5), since they require an additional argument.
Theorem 3 (-Exactness). Quasi-positive strongly-triangular polynomial systems are -exact.
Proof. The -algebras and have unique division, so we can apply Proposition 4 for proving the theorem. □
We note that the analogous statement for
instead of
fails, even though
has unique division. The problem is that
is not a
-algebra. As a counter-example, reconsider the strongly-triangular system of quasi-positive system equations:
This system implies over but accept the abstract solution mapping x and y to distinct signs, so it is not -exact. Nevertheless, it is -exact by Theorem 3.
Corollary 2 (-exact rewriting of linear equation systems). For any linear -equations ϕ the elementary mode rewriting is -equivalent, -exact, and can be computed in at most exponential time from ϕ.
Proof. The elementary modes rewriting Corollary 1 shows that any linear -equation system is -equivalent a formula of the form such that is a quasi-positive strongly-triangular linear equation system. Theorem 3 shows that any quasi-positive strongly-triangular linear equation system is -exact, so is . Existential quantification preserves -exactness by Proposition 2, so is -exact too. □
This -exact rewriting permits us to compute the boolean abstraction of any system of linear -equations by computing the -solutions of the -equivalent -exact formula. The latter can be done by finite domain constraint programming.
Our objective to find an algorithm for computing the sign abstraction of a system of linear
-equations remains open. We finally approach it in
Section 9. While the idea is to use the
-exact rewriting algorithm, we first need to generalize it from linear systems to mixed systems. This is done in
Section 8. The generalization relies on the notion of
-invariance, which we discuss next in
Section 7.
7. Invariance
A problem that we need to overcome is that conjunctions of two h-exact formulas may not be h-exact. The situation changes when assuming the following notion of h-invariance for at least one of the two formulas.
Definition 13 (Invariance).
Let be a Σ-abstraction and a subset of variables. We call a subset R of variable assignments of type h-invariant iff:We call a Σ-formula ϕ h-invariant if its solution set is.
The relevance of the notion of invariance for exactness of conjunctions—that we will formalize in Proposition 5—is due to the the following lemma:
Lemma 11. If either or are h-invariant then: .
Proof. The one inclusion is straightforward without invariance:
For the other inclusion, we can assume without loss of generality that is h-invariant. So let . Then, there exist and such that . By h-invariance of it follows that . So , and hence, . □
We can now present the algebraic characterization of h-invariance based on the concretization function of the Galois connection of h. Recall that for all subsets of concrete variable assignments R. The inverse inclusion characterizes the h-invariance of R.
Lemma 12 (Algebraic characterization). Let be a Σ-abstraction. A subset R of concrete variable assignment is h-invariant for h iff h .
Proof. “⇒”. Let R be h-invariant and . Then, there exists such that . The h-invariance of R thus implies that .
“⇐”. Suppose that . Let such that and . We have to show that . From and it follows that and thus as required. □
Lemma 13 (Variable extension preserves invariance). Let h be a surjective abstraction and R a subset of functions of type and V a subset of variables disjoint from . If R is h-invariant then is h-invariant too.
Proof. This follows straightforwardly from the characterization of h-invariance in Lemma 12 and the following two claims:
Claim 4.
If h is surjective then .
This follows from where we use the surjectivity of h in the last step.
Claim 5.
for any subset
of functions of type
.
□
Lemma 14. Let be a surjective Σ-abstraction, ϕ be a Σ-formula, and . Then, the h-invariance of ϕ implies the h-invariance of .
Proof. This follows from the cylindrification Lemma 3 and that extension preserves h-invariance as shown in Lemma 13. □
Proposition 5 (Exactness is preserved by conjunction when assuming invariance). Let h be a surjective Σ-abstraction. If and are h-exact Σ-formulas and or are h-invariant then the conjunction is h-exact.
Proof. Let
and
be
h-exact
-formulas. We assume without loss of generality that
is
h-invariant. Let
. Since
the set
is
h-invariant too by Lemma 14. We can now show that
is
h-exact as follows:
□
Our next objective is to show that h-invariant formulas are closed under conjunction, disjunction, and existential quantification. The two former closure properties rely on the following two algebraic properties of abstraction decomposition.
Lemma 15 (Concretization preserves join and meet). For any Σ-abstraction , any subsets of assignments of type and and V a subset of variables:
For general Galois connections, concretization is well-known to preserve joins but may not preserve meets. Still, meets are preserved for any Galois connections where the the concrete and abstract domains C and A are powersets as in our setting, so that joins are unions and meets intersections.
Proof. The case of unions follows straightforwardly from the definitions:
The case of intersection is symmetric:
□
Lemma 16 (Intersection and union preserve invariance). Let be a Σ-abstraction. Then, the intersection and union of any two h-invariant subsets and of variables assignments of type is h-invariant.
Proof. This follows from the algebraic characterization Lemma 12 for invariance, in combination with the algebraic properties of composition and decomposition given in Lemmas 7, 11, and 15. □
Lemma 17 (Concretization commutes with projection). .
Proof. For all we have . □
Proposition 6 (Invariance is preserved by conjunction, disjunction, and quantification). If h is a surjective abstraction, then the class of h-invariant FO-formulas is closed under conjunction, disjunction, and existential quantification.
Proof. Let be a -abstraction.
Case of conjunction: Let
and
be
h-invariant and
. By Lemma 14 the sets
and
are both
h-invariant, and so by Lemma 16 is their intersection. Hence:
By Lemma 12 in the other direction, this implies that is h-invariant.
Case of disjunction: Analogous to the case of conjunction.
Case of existential quantification:
By Lemma 12, this implies that is h-invariant. □
We do not know whether negation preserves h-invariance in general, but for finite it can be shown that if is h-exact and h-invariant, then is h-exact and h-invariant too.
Proposition 7. Let h be a surjective Σ-abstraction. Then, the class of h-exact and h-invariant Σ-formulas is closed under conjunction, disjunction, and existential quantification.
Proof. Closure under conjunction follows from Propositions 5 and 6, closure under disjunction from Propositions 1 and 6, and closure under existential quantification by Propositions 2 and 6. □
Theorem 4 (-invariance and -exactness of polynomial equations). Any positive polynomial equation such that p has no constant term is -exact and -invariant.
Proof. Consider a positive polynomial equation such that p has no constant term and only positive coefficients. Thus, p has the form where , and .
Claim 6.
For both algebras :
The polynomial has a value of zero if and only if all its monomials do, that is: for all . Since constant terms are ruled out, we have . Furthermore, we assumed for all polynomials that . So for all there must exist such that .
Claim 7.
The equation is -exact and -invariant.
This proof of this claim is straightforward from the definitions.
With these two claims, we are now in the position to prove the Theorem 4. Since the class of
-exact and
-invariant formulas is closed under conjunction and disjunction by Proposition 7, it follows from by Claim 7 that
is both
-exact and
-invariant. Since this formula is equivalent over
to the polynomial equation by Claim 6, the
-invariance carries over to
. The
-exactness also carries over based on the equivalence for both structures
and
:
□
8. -Exact Rewriting of -Mixed Systems
In this section, we lift our main result to -mixed system, presenting a rewrite algorithm that makes any -mixed system -exact.
Definition 14. A -mixed system is a formula in of the form where ϕ is a system of linear -equations and a -invariant and -exact first-order formula.
Note that linear equation systems , with A an integer matrix and a sequence of pairwise distinct variables, need not to be -exact, if A is not positive. However, as shown by the elementary mode rewriting Corollary 1 any linear equation systems is -equivalent to some quasipositive strongly-triangular linear system, that is -exact by Theorem 3.
Our next objective is to rewrite formulas to reduce the overapproximation coming with the abstract interpretation over the Booleans by John’s theorem. The idea is to make a linear equation system -exact that are used as subformulas as for instance of -mixed systems.
We recall from Corollary 1 that the elementary mode rewriting
of a linear equation system is an
-exact formula that is
-equivalent to
. We now introduce the boolean rewriting by lifting the elementary mode rewriting to a richer class of formulas. Given a vector
, a linear equation system
, and a formula
, the boolean rewriting is defined by:
The boolean rewriting may indeed reduce the overapproximation coming with abstract interpretation of formulas over the booleans, as show by the following proposition.
Proposition 8. .
Proof. Let
be a linear equation system,
,
and
. Since
is
-equivalent to
, it follows that
is
-equivalent to
. Hence,
so that:
By John’s theorem, we have:
Furthermore, by
-exactness,
-equivalence, and again John’s theorem, we have:
Therefore, it follows that:
In combination this yields the inclusions of the proposition. □
Theorem 5 (Main). For any -mixed system the boolean rewriting is -exact, -equivalent to ψ, and can be computed in at most exponential time.
Proof. Let be a -mixed system . where is a linear equation system and a first-order formula that is -exact and -invariant. Based on the elementary modes rewriting Corollary 1, the linear equation system can be transformed in at most exponential time to the form where is a quasipositive strongly-triangular system of linear equations. Such polynomial equation systems are -exact by Theorem 3, and so is . The Invariance Proposition 5 shows that the conjunction is -exact too, since was assumed to be -exact and -invariant. The -exactness is preserved by existential quantification by Proposition 2, so the formula is -exact too. □
Corollary 3. The -abstraction of the -solution set of a -mixed system ϕ, that is , can be computed in at most exponential time in the size of the system ϕ.
Proof. Given a -mixed system , we can apply Theorem 5 to compute in at most exponential time a -equivalent formula that is -exact. It is then sufficient to compute in exponential time in the size of . This can be done in the naive manner, that is by evaluating the formula —which may be of exponential size—over all possible boolean variable assignments, of which there may be exponentially many. For each assignment, the evaluation can be done in PSpace, and thus in exponential time. The overall time required is thus a product of two exponentials, which remains exponential. □
The algorithm from the proof Corollary 3 can be improved so that it becomes sufficiently efficient for practical use. For this the two steps with exponential worst case complexity must be made polynomial for the particular instances. Firstly, note that the computation of the elementary modes (Corollary 1) is known to be computationally feasible. Various algorithms for this purpose were implemented [
16,
24,
25,
26] and applied successfully to problems in systems biology [
14]. The second exponential step concerns the enumeration of all boolean variable assignments. This enumeration may be avoided by using constraint programming techniques for computing the solution set
. For those
-mixed systems for which both steps can be done in polynomial time, we can compute the boolean abstraction of the
-solution set in polynomial time too. The practical feasibility of this approach was demonstrated recently at an application to knockout prediction in systems biology [
6], where previously only over-approximations could be computed.
10. Application to Program Analysis
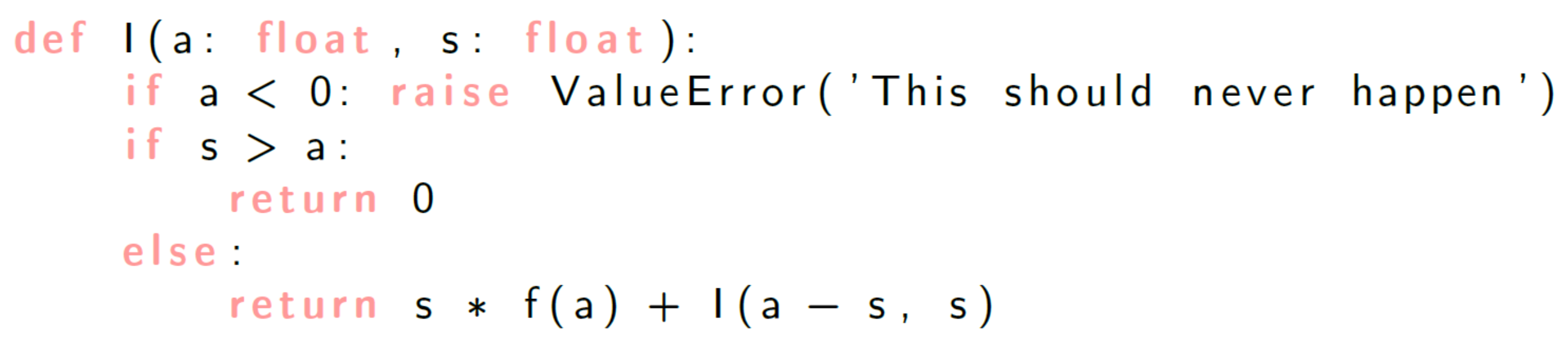
We illustrate our results by applying the sign abstraction for program analysis based on abstract interpretation. We consider the Python implementation in
Figure 6 of the function
. A call
supposedly computes the approximation of the integral
with step width
for some total function
. Abstract interpretation allows us to find out the conditions that must hold on the input parameters for
to work properly, and in particular to avoid exception throwing.
We can first interpret numeric programs abstractly as a formula of first-order logic with signature
. We illustrate this in an ad hoc manner on the integral example
:
The variables and are the formal parameters in the definition of . The others are fresh variables introduced to handle exceptions or function calls: the boolean flag represents exception throwing, the boolean flag has a true value only when a recursive call is made to with actual parameters represented by the variables and return value represented by , while is the variable for the return value of the call to the function . The final return value of is represented by the variable . In what follows, we are not interested in the signs of the last three variables, so we quantify them existentially.
The sign behavior of function is given by the formula’s sign abstraction . Given that is not -mixed system, we cannot apply the algorithm from Theorem 6 directly to compute this sign abstraction. Nevertheless, it will be beneficial as we will illustrate below.
By John’s theorem, the sign abstraction
can be overapproximated by the abstract interpretation
. Since
is a finite structure, this abstract interpretation can be computed by finite domain constraint programming. For this, we implemented a solver for first-order formulas over the structure
with Minizinc [
17]. When applied to
it returns the set of abstract solutions
given in
Table 1. This set contains the 6 unjustified abstract solutions
outside
. In the table they are distinguished by gray background color. We also note that the last three solutions
could be ruled out when using a more precise abstract program interpretation, taking into account that no recursive call is possible when an exception is thrown.
The sets of abstract solutions provide information on possible sign of values of the parameters in a call
. For example, solution 1 in
Table 1 states that when called with values of signs
the function
will not raise an exceptions nor make a recursive call. Solution 8 states that when called with values of signs
function
may go into recursion with signs
without raising an exception.
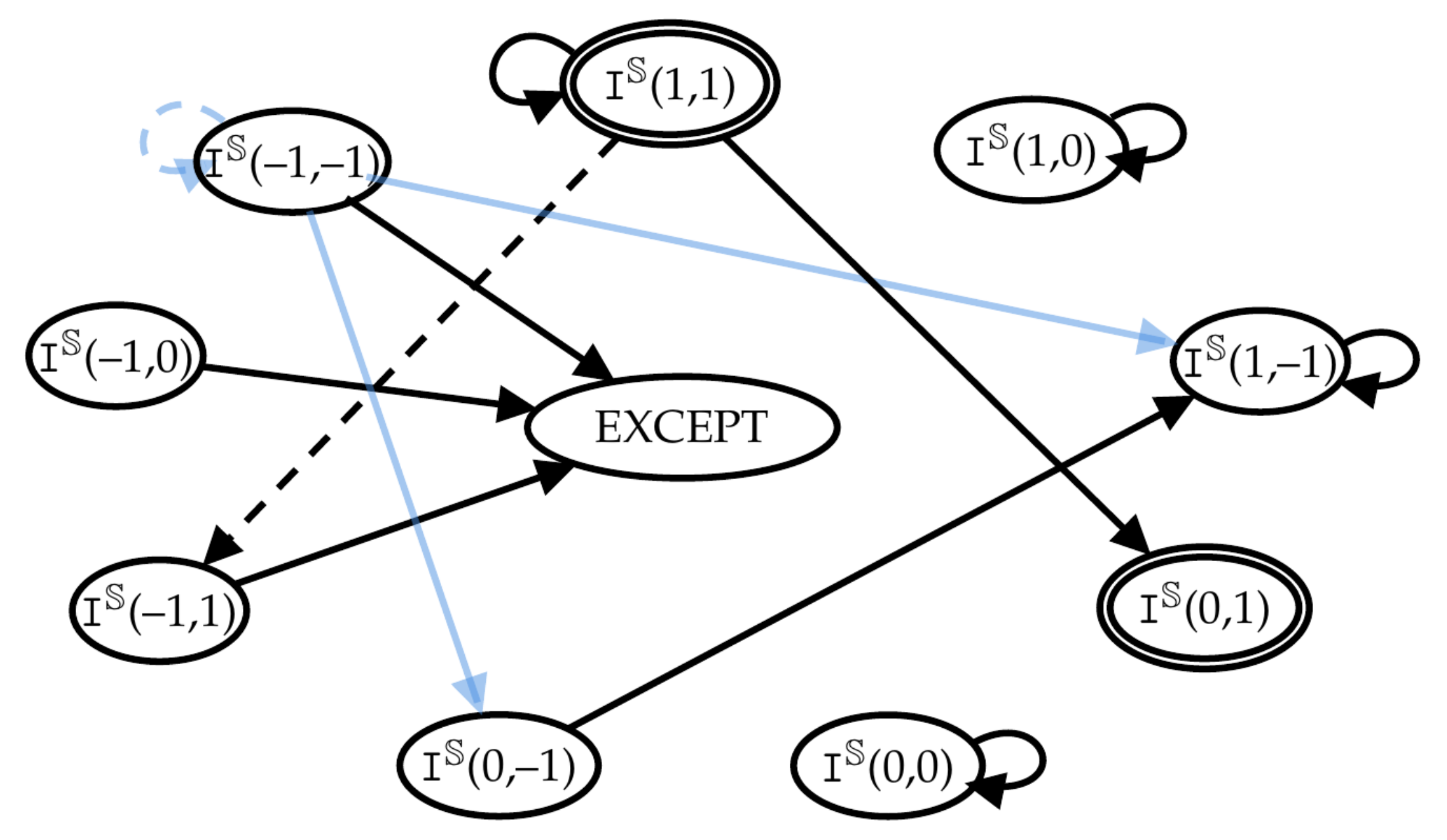
Any set of abstract solutions defines an abstract call graph. The abstract call graphs of
and
from
Table 1 are given in
Figure 7. Solution 1 in
Table 1 implies a solid edge from the node
to the node
. The edge is solid since solution 1 is justified. Edges induced by unjustified solutions are dashed. The unjustified solution 10 for instance induces the dashed edge from
to
. Solutions with
and
do not induce any edge. Instead, they show that the computation may stop, producing final nodes that are surrounded by a double circle. The final nodes are
and
. Note that for all nonfinal nodes, either an exception is raised or the computation loops endlessly. Solutions with
induce an edge to the
except node.
Given that only 2 unjustified solutions with and (10 and 18), there are only 2 dashed edges in the graph. Furthermore, the edges induced by the last three solutions 17, 18, 19 are drawn in blue, since these could be removed with a more precise abstract program interpretation than .
The sign analysis without the unjustified dashed edges yields the following result: the program in state , where and may either terminate, loop indefinitely, or go to state and terminate there immediately. With the unjustified dashed edges, however, it wrongly seems possible that the program may also raise an exception by passing through . This overapproximation would be particularly unfortunate since state is the only useful state to call .
We next show how to remove the unjustified solutions by applying the overapproxmation algorithm for the sign abstraction from Proposition 10, that lifts the algorithm for exact sign abstraction from Theorem 6 to a richer class of formulas. The idea is to split the formula
into its linear part and the rest. Before doing so, we preprocess the inequation
: We introduce a fresh variable
, add the equation
, and rewrite
to
. The linear part of
then becomes:
We can then rewrite the linear part into the signature
by moving the negative parts positively onto the other side. This yields the following linear equation system:
The remainder of
can be rewritten as follows:
It is not clear whether the conjunction of both parts is a
-mixed system, since it is not clear how to show the
-invariance of the equation
. Still, we can apply the overapproximation algorithm of the sign abstraction from Proposition 10. It indeed improves on John’s approximation, ruling out both unjustified solutions. The details are worked out in
Appendix A.
In the general case, linear equation systems are not enough, in which case our algorithm from Theorem 6 for computing sign abstractions cannot be applied. But then we can still apply the overapproximation algorithm from Proposition 10 which rewrites a linear part of the formula exactly. As illustrated by the present example, this overapproximation is often way more precise than John’s.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}