
An Invariant-Preserving Scheme for the Viscous Burgers-Poisson System



Abstract
:1. Introduction
2. Analytic Property
3. Finite Difference Method
3.1. Discretization
3.2. Formulation of the FDM
3.3. Stability Analysis
4. Convergence Analysis
- 1.
- We are losing power in τ because of the initial approximation step. However, using a predictor–corrector method, one may obtain in time.
- 2.
- As a consequence, we obtain the estimates and .
5. Numerical Results
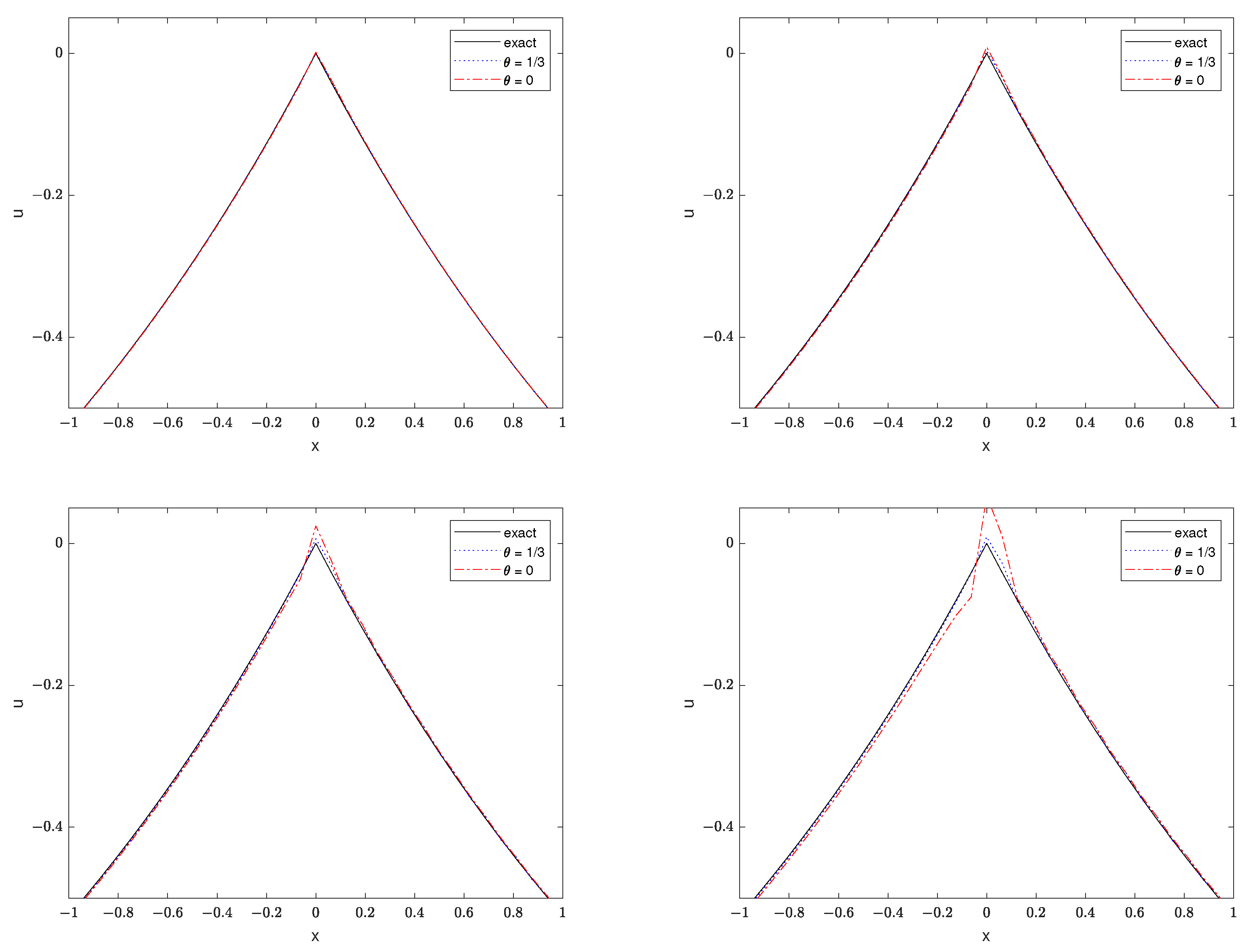
5.1. Accuracy Test for the Inviscous Problem
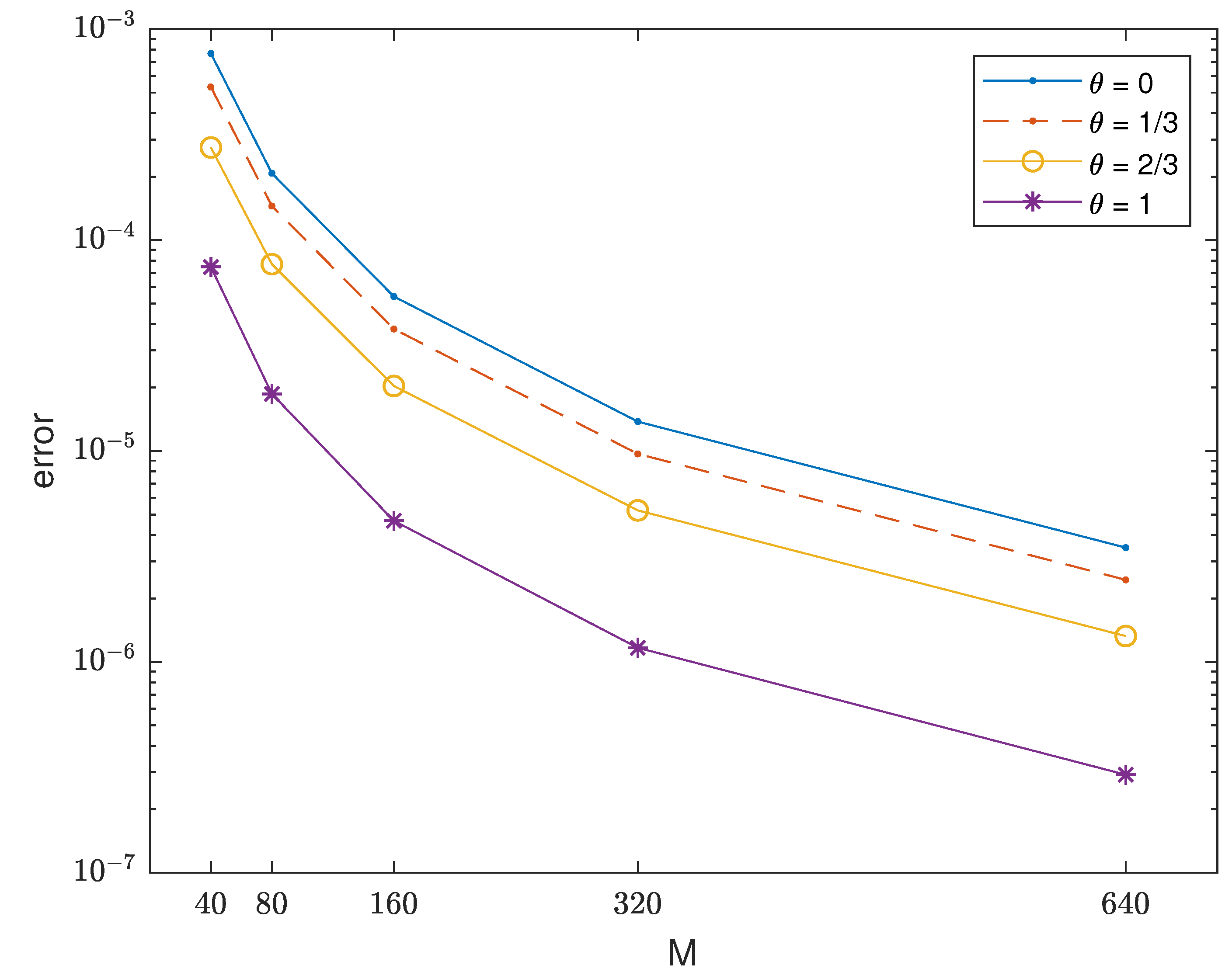
5.2. Accuracy Test for the Viscous Problem
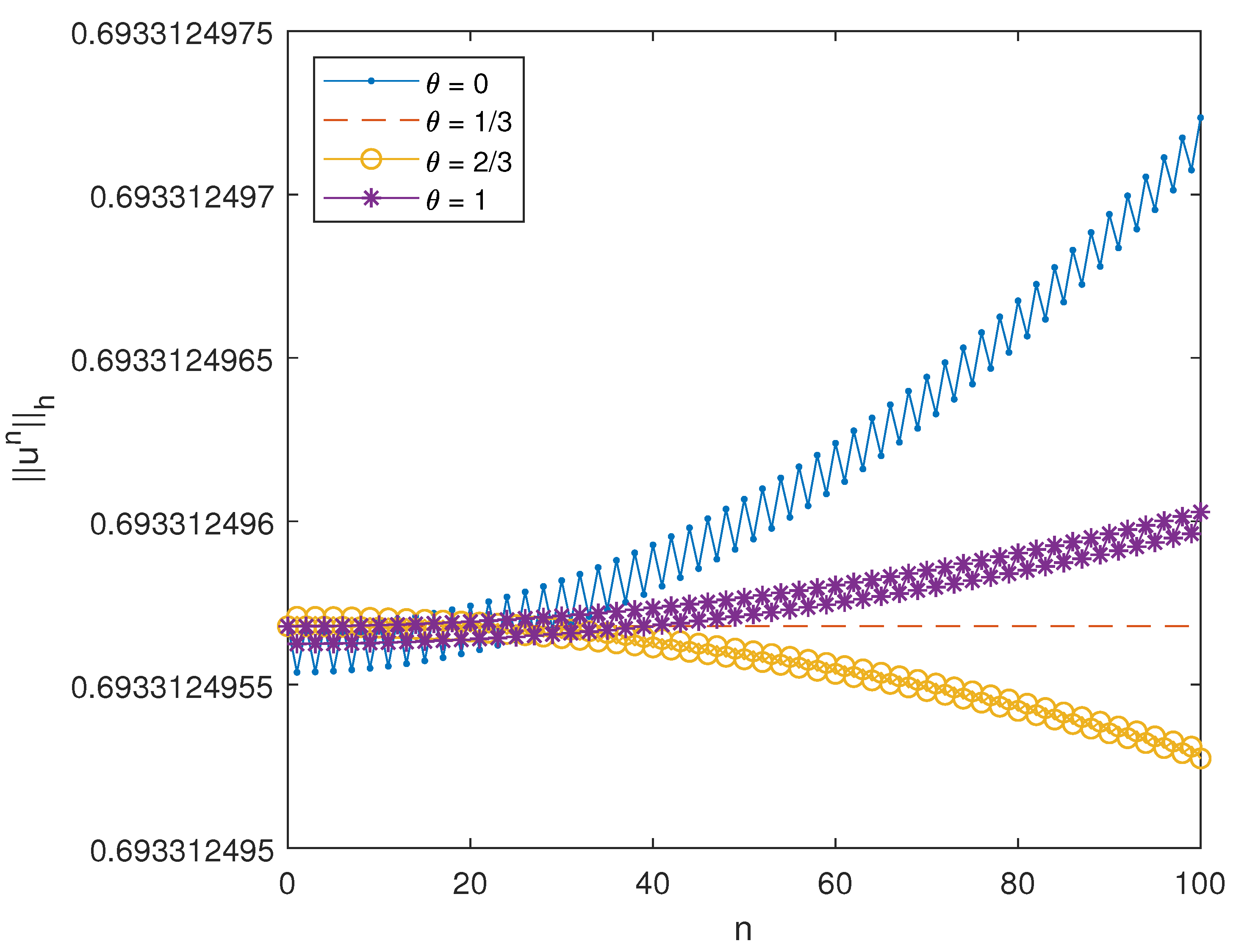
5.3. Invariant-Preserving Test
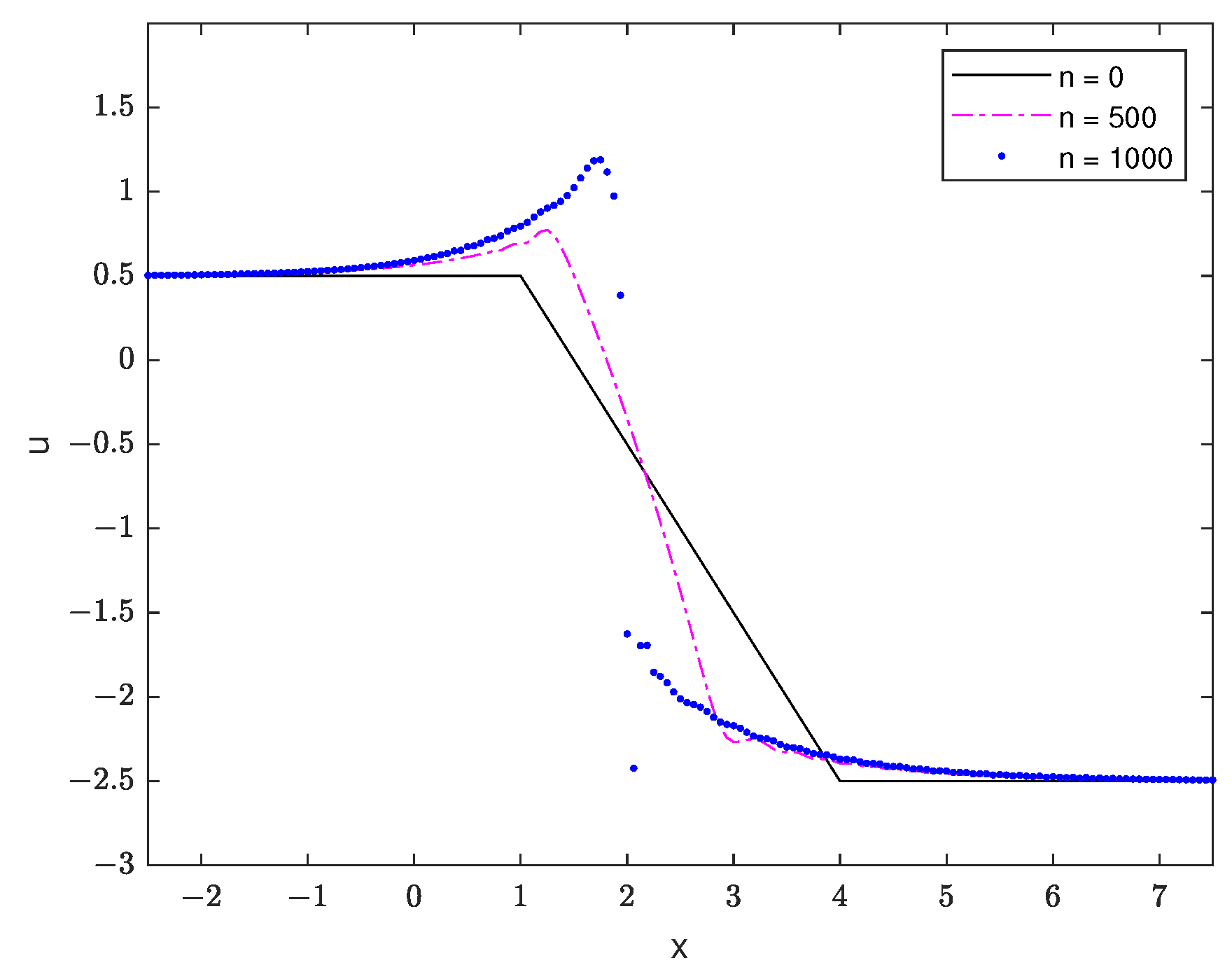
5.4. Asymptotic Test
6. Discussion
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Korteweg, D.J.; de Vries, G. On the change of form of long waves advancing in a rectangular canal, and on a new type of long stationary waves. Philos. Mag. 1895, 39, 422–443. [Google Scholar] [CrossRef]
- Whitham, G.B. Pure and Applied Mathematics. In Linear and Nonlinear Waves; Wiley-Interscience [John Wiley & Sons]: New York, NY, USA; London, UK; Sydney, Australia, 1974. [Google Scholar]
- Fellner, K.; Schmeiser, C. Burgers-Poisson: A nonlinear dispersive model equation. SIAM J. Appl. Math. 2004, 64, 1509–1525. [Google Scholar] [CrossRef] [Green Version]
- Ploymaklam, N.; Kumbhar, P.M.; Pani, A.K. A Priori Error Anal. Local Discontinuous Galerkin Method Viscous Burgers-Poisson Syst. Int. J. Numer. Anal. Model. 2017, 14, 784–807. [Google Scholar]
- Turgay, N.C.; Hizel, E. Group invariant solutions of Burgers-Poisson equation. Int. Math. Forum 2007, 2, 2701–2710. [Google Scholar] [CrossRef] [Green Version]
- Grunert, K.; Nguyen, K.T. On the Burgers-Poisson equation. J. Differ. Equ. 2016, 261, 3220–3246. [Google Scholar] [CrossRef] [Green Version]
- Camassa, R.; Holm, D.D. An integrable shallow water equation with peaked solitons. Phys. Rev. Lett. 1993, 71, 1661–1664. [Google Scholar] [CrossRef] [Green Version]
- Camassa, R.; Holm, D.D.; Hyman, J.M. A new integrable shallow water equation. In Advances in Applied Mechanics; Elsevier: Amsterdam, The Netherlands, 1994; Volume 31, pp. 1–33. [Google Scholar]
- Benjamin, T.B. Internal waves of permanent form in fluids of great depth. J. Fluid Mech. 1967, 29, 559–592. [Google Scholar] [CrossRef]
- Ono, H. Algebraic solitary waves in stratified fluids. J. Phys. Soc. Jpn. 1975, 39, 1082–1091. [Google Scholar] [CrossRef]
- Rosenau, P. A quasi-continuous description of a nonlinear transmission line. Phys. Scr. 1986, 34, 827–829. [Google Scholar] [CrossRef]
- Rosenau, P. Dynamics of Dense Discrete Systems: High Order Effects. Prog. Theor. Phys. 1988, 79, 1028–1042. [Google Scholar] [CrossRef] [Green Version]
- Peregrine, D.H. Calculations of the development of an undular bore. J. Fluid Mech. 1966, 25, 321–330. [Google Scholar] [CrossRef]
- Peregrine, D.H. Long waves on a beach. J. Fluid Mech. 1967, 27, 815–827. [Google Scholar] [CrossRef]
- Hizel, E.; Küçükarslan, S. A numerical analysis of the Burgers-Poisson (BP) equation using variational iteration method. In Proceedings of the 3rd WSEAS International Conference on Applied and Theoretical Mechanics, Tenerife, Canary Islands, Spain, 14–16 December 2007. [Google Scholar]
- Zeng, C.; Yang, Q.; Zhang, B. Homotopy perturbation method for fractional-order Burgers-Poisson equation. arXiv 2010, arXiv:1003.1828. [Google Scholar]
- Nwamba, J.I. Exact and explicit approximate solutions to the multi-order fractional Burgers-Poisson and fractional Burgers-Poisson equations. Appl. Comput. Math. 2013, 2, 78–85. [Google Scholar] [CrossRef]
- Liu, H.; Ploymaklam, N. A local discontinuous Galerkin method for the Burgers-Poisson equation. Numer. Math. 2015, 129, 321–351. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Zhang, Q.; Sun, Z.Z. The pointwise error estimates of two energy-preserving fourth-order compact schemes for viscous Burgers’ equation. Adv. Comput. Math. 2021, 47, 42. [Google Scholar] [CrossRef]
- Kannan, R.; Wang, Z.J. A high order spectral volume solution to the Burgers’ equation using the Hopf-Cole transformation. Int. J. Numer. Methods Fluids 2012, 69, 781–801. [Google Scholar] [CrossRef]
- Kannan, R.; Wang, Z.J. A study of viscous flux formulations for a p-multigrid spectral volume Navier Stokes solver. J. Sci. Comput. 2009, 41, 165–199. [Google Scholar] [CrossRef]
- Kannan, R.; Wang, Z.J. LDG2: A variant of the LDG flux formulation for the spectral volume method. J. Sci. Comput. 2011, 46, 314–328. [Google Scholar] [CrossRef]
- Kannan, R. A high order spectral volume formulation for solving equations containing higher spatial derivative terms: Formulation and analysis for third derivative spatial terms using the LDG discretization procedure. Commun. Comput. Phys. 2011, 10, 1257–1279. [Google Scholar] [CrossRef]
- Kannan, R. A high order spectral volume formulation for solving equations containing higher spatial derivative terms II: Improving the third derivative spatial discretization using the LDG2 method. Commun. Comput. Phys. 2012, 12, 767–788. [Google Scholar] [CrossRef]
- Kuo, P.Y.; Sanz-Serna, J.M. Convergence of methods for the numerical solution of the Korteweg-de Vries equation. IMA J. Numer. Anal. 1981, 1, 215–221. [Google Scholar] [CrossRef]
- Zhang, L. A finite difference scheme for generalized regularized long-wave equation. Appl. Math. Comput. 2005, 168, 962–972. [Google Scholar] [CrossRef]
- Zuo, J.M.; Zhang, Y.M.; Zhang, T.D.; Chang, F. A new conservative difference scheme for the general Rosenau-RLW equation. Bound. Value Probl. 2010, 2010, 516260. [Google Scholar] [CrossRef] [Green Version]
- Pan, X.; Zhang, L. On the convergence of a conservative numerical scheme for the usual Rosenau-RLW equation. Appl. Math. Model. 2012, 36, 3371–3378. [Google Scholar] [CrossRef]
- Wang, X.; Sun, Z.Z. A second order convergent difference scheme for the initial-boundary value problem of Korteweg–de Vires equation. Numer. Methods Partial Differ. Equ. 2021, 37, 2873–2894. [Google Scholar] [CrossRef]
- Zhang, Q.; Qin, Y.; Wang, X.; Sun, Z.Z. The study of exact and numerical solutions of the generalized viscous Burgers’ equation. Appl. Math. Lett. 2021, 112, 106719. [Google Scholar] [CrossRef]
- Hu, J.; Xu, Y.; Hu, B. Conservative Linear Difference Scheme for Rosenau-KdV Equation. Available online: https://www.hindawi.com/journals/amp/2013/423718/ (accessed on 27 September 2021).
- Janwised, J.; Wongsaijai, B.; Mouktonglang, T.; Poochinapan, K. A Modified Three-Level Average Linear-Implicit Finite Difference Method for the Rosenau-Burgers Equation. Available online: https://www.hindawi.com/journals/amp/2014/734067/ (accessed on 27 September 2021).
- Hu, J.; Xu, Y.; Hu, B.; Xie, X. Two conservative difference schemes for Rosenau-Kawahara equation. Adv. Math. Phys. 2014, 11, 217393. [Google Scholar] [CrossRef] [Green Version]
- Wongsaijai, B.; Poochinapan, K. A three-level average implicit finite difference scheme to solve equation obtained by coupling the Rosenau-KdV equation and the Rosenau-RLW equation. Appl. Math. Comput. 2014, 245, 289–304. [Google Scholar] [CrossRef]
- Zhang, Q.; Wang, X.; Sun, Z.Z. The pointwise estimates of a conservative difference scheme for Burgers’ equation. Numer. Methods Partial Differ. Equ. 2020, 36, 1611–1628. [Google Scholar] [CrossRef]
- Zhou, Y. Applications of Discrete Functional Analysis to the Finite Difference Method; Pergamon Press: Oxford, UK, 1991. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| N | ||||||||
|---|---|---|---|---|---|---|---|---|
| Error | Order | Error | Order | Error | Order | Error | Order | |
| 40 | 6.7498 × 10−4 | 7.8284 × 10−4 | 4.2413 × 10−4 | 5.4619 × 10−4 | ||||
| 80 | 1.7452 × 10−4 | 1.95 | 2.0982 × 10−4 | 1.90 | 1.1021 × 10−4 | 1.94 | 1.4711 × 10−4 | 1.89 |
| 160 | 4.4369 × 10−5 | 1.98 | 5.4335 × 10−5 | 1.95 | 2.8086 × 10−5 | 1.97 | 3.8179 × 10−5 | 1.95 |
| 320 | 1.1186 × 10−5 | 1.99 | 1.3826 × 10−5 | 1.97 | 7.0886 × 10−6 | 1.99 | 9.7254 × 10−6 | 1.97 |
| 640 | 2.8083 × 10−6 | 1.99 | 3.4874 × 10−6 | 1.99 | 1.7806 × 10−6 | 1.99 | 2.4543 × 10−6 | 1.99 |
| N | ||||||||
|---|---|---|---|---|---|---|---|---|
| Error | Order | Error | Order | Error | Order | Error | Order | |
| 40 | 1.7901 × 10−4 | 2.7492 × 10−4 | 9.8426 × 10−5 | 7.4600 × 10−5 | ||||
| 80 | 4.7136 × 10−5 | 1.93 | 7.6875 × 10−5 | 1.84 | 2.4617 × 10−5 | 2.00 | 1.8652 × 10−5 | 2.00 |
| 160 | 1.2084 × 10−5 | 1.96 | 2.0333 × 10−5 | 1.92 | 6.1550 × 10−6 | 2.00 | 4.6661 × 10−6 | 2.00 |
| 320 | 3.0585 × 10−6 | 1.98 | 5.2290 × 10−6 | 1.96 | 1.5388 × 10−6 | 2.00 | 1.1665 × 10−6 | 2.00 |
| 640 | 7.6934 × 10−7 | 1.99 | 1.3259 × 10−6 | 1.98 | 3.8470 × 10−7 | 2.00 | 2.9163 × 10−7 | 2.00 |
| N | ||||||||
|---|---|---|---|---|---|---|---|---|
| Error | Order | Error | Order | Error | Order | Error | Order | |
| 80 | 9.8070 × 10−1 | 8.8961 × 10−1 | 1.0900 | 1.0686 | ||||
| 160 | 1.5003 × 10−1 | 2.71 | 1.6312 × 10−1 | 2.45 | 1.4306 × 10−1 | 2.93 | 1.5557 × 10−1 | 2.78 |
| 320 | 3.0028 × 10−2 | 2.32 | 3.0737 × 10−2 | 2.41 | 2.9229 × 10−2 | 2.29 | 3.1383 × 10−2 | 2.31 |
| 640 | 7.0535 × 10−3 | 2.09 | 7.3580 × 10−3 | 2.06 | 7.0430 × 10−3 | 2.05 | 7.6141 × 10−3 | 2.04 |
| 1280 | 1.7182 × 10−3 | 2.04 | 1.8173 × 10−3 | 2.02 | 1.7445 × 10−3 | 2.01 | 1.8972 × 10−3 | 2.00 |
| N | ||||||||
|---|---|---|---|---|---|---|---|---|
| Error | Order | Error | Order | Error | Order | Error | Order | |
| 80 | 1.1878 | 1.2909 | 1.2501 | 1.4776 | ||||
| 160 | 1.5447 × 10−1 | 2.94 | 1.7385 × 10−1 | 2.89 | 1.7512 × 10−1 | 2.84 | 2.0320 × 10−1 | 2.86 |
| 320 | 3.3077 × 10−2 | 2.22 | 3.5948 × 10−2 | 2.27 | 3.7731 × 10−2 | 2.21 | 4.1052 × 10−2 | 2.31 |
| 640 | 8.0712 × 10−3 | 2.03 | 8.7244 × 10−3 | 2.04 | 9.2118 × 10−3 | 2.03 | 9.9053 × 10−3 | 2.05 |
| 1280 | 2.0101 × 10−3 | 2.01 | 2.1747 × 10−3 | 2.00 | 2.2928 × 10−3 | 2.01 | 2.4630 × 10−3 | 2.01 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Darayon, C.; Khebchareon, M.; Ploymaklam, N. An Invariant-Preserving Scheme for the Viscous Burgers-Poisson System. Computation 2021, 9, 115. https://doi.org/10.3390/computation9110115
Darayon C, Khebchareon M, Ploymaklam N. An Invariant-Preserving Scheme for the Viscous Burgers-Poisson System. Computation. 2021; 9(11):115. https://doi.org/10.3390/computation9110115
Chicago/Turabian StyleDarayon, Chayapa, Morrakot Khebchareon, and Nattapol Ploymaklam. 2021. "An Invariant-Preserving Scheme for the Viscous Burgers-Poisson System" Computation 9, no. 11: 115. https://doi.org/10.3390/computation9110115
APA StyleDarayon, C., Khebchareon, M., & Ploymaklam, N. (2021). An Invariant-Preserving Scheme for the Viscous Burgers-Poisson System. Computation, 9(11), 115. https://doi.org/10.3390/computation9110115