
Deep Learning-Based Spectrum Reconstruction Method for Raman Spectroscopy

Abstract
:1. Introduction
2. Basic Concepts
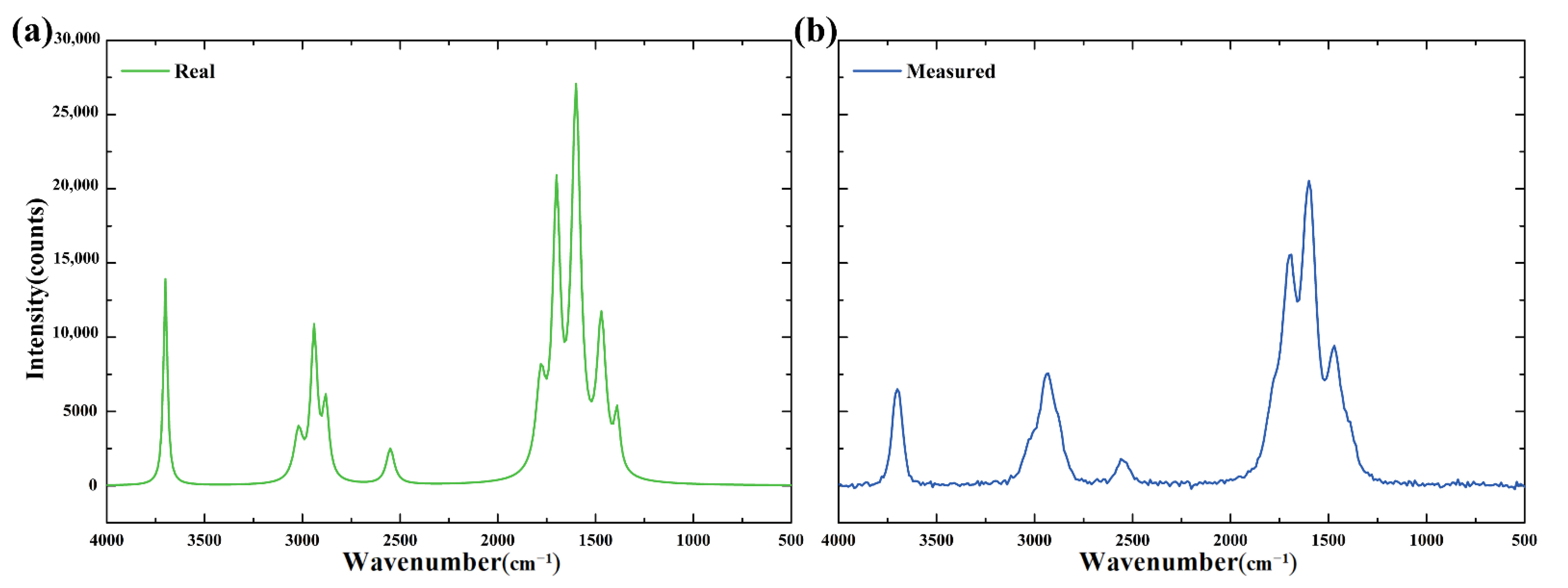
2.1. The Measured Spectral Model
2.2. Spectral Reconstruction Model
3. Raman Spectrum Reconstruction Method
3.1. Traditional Methods
3.2. Proposed Method
4. Simulations and Experiments
4.1. CNN Training Stage
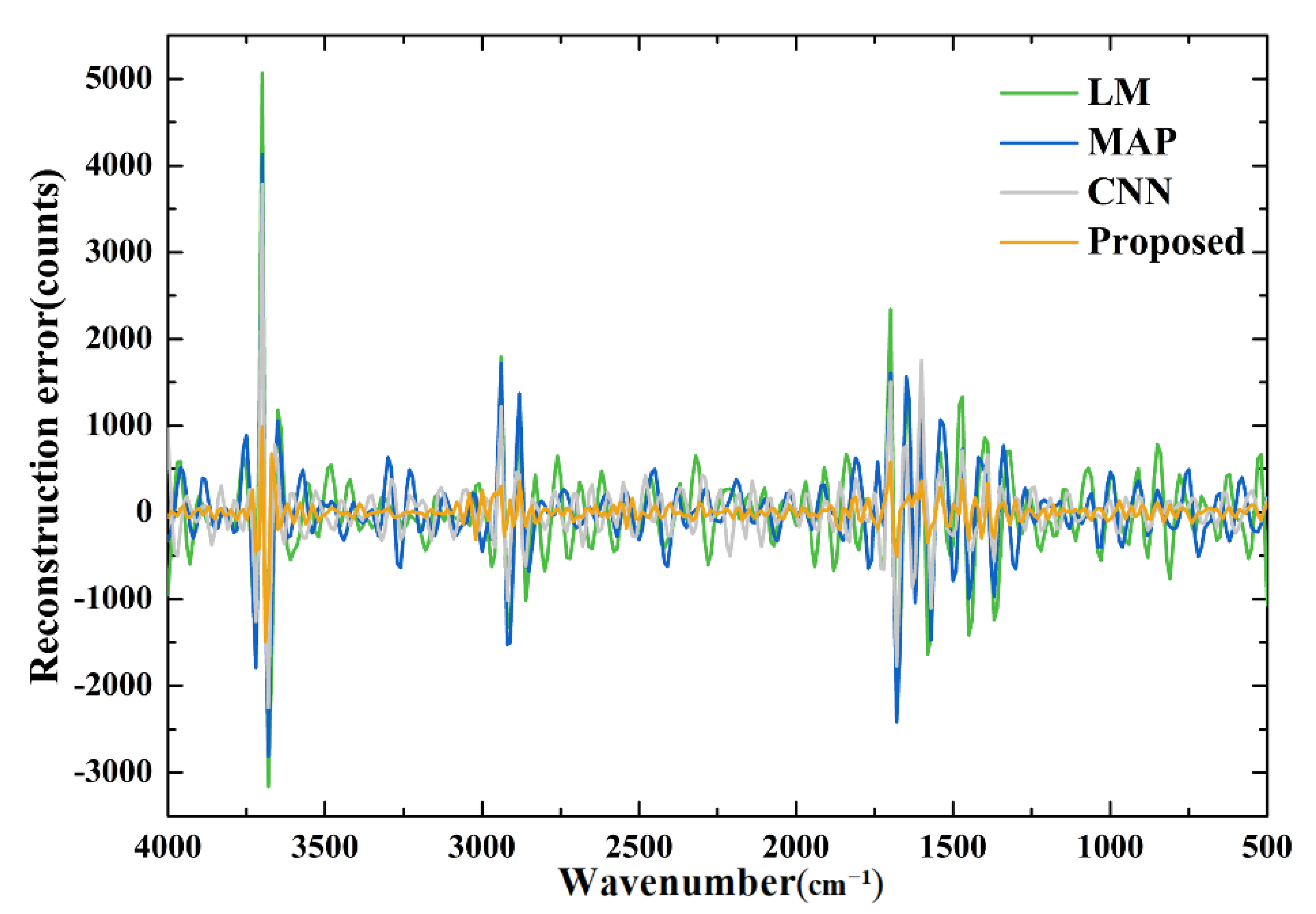
4.2. Simulations
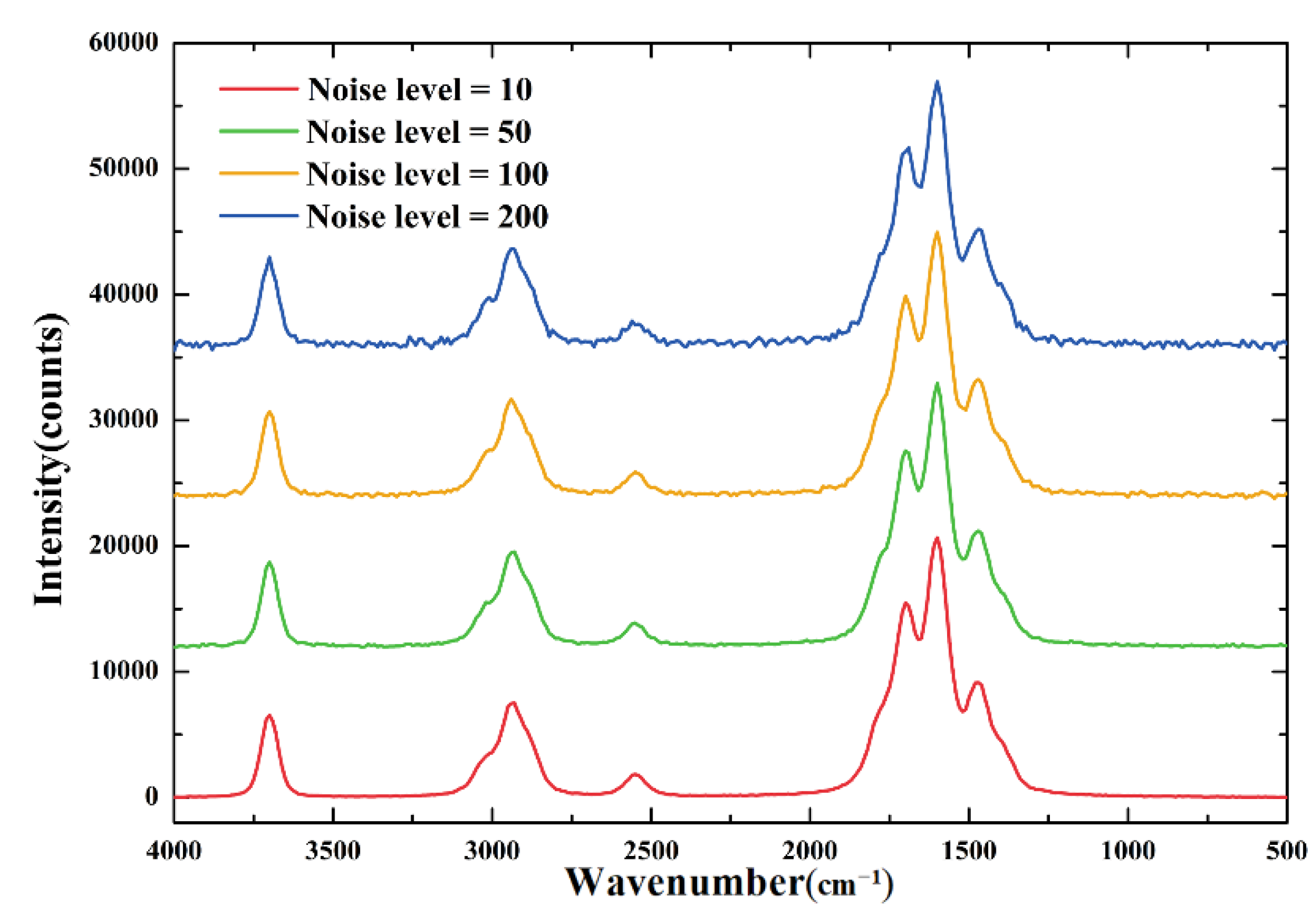
4.3. Influence of Noise
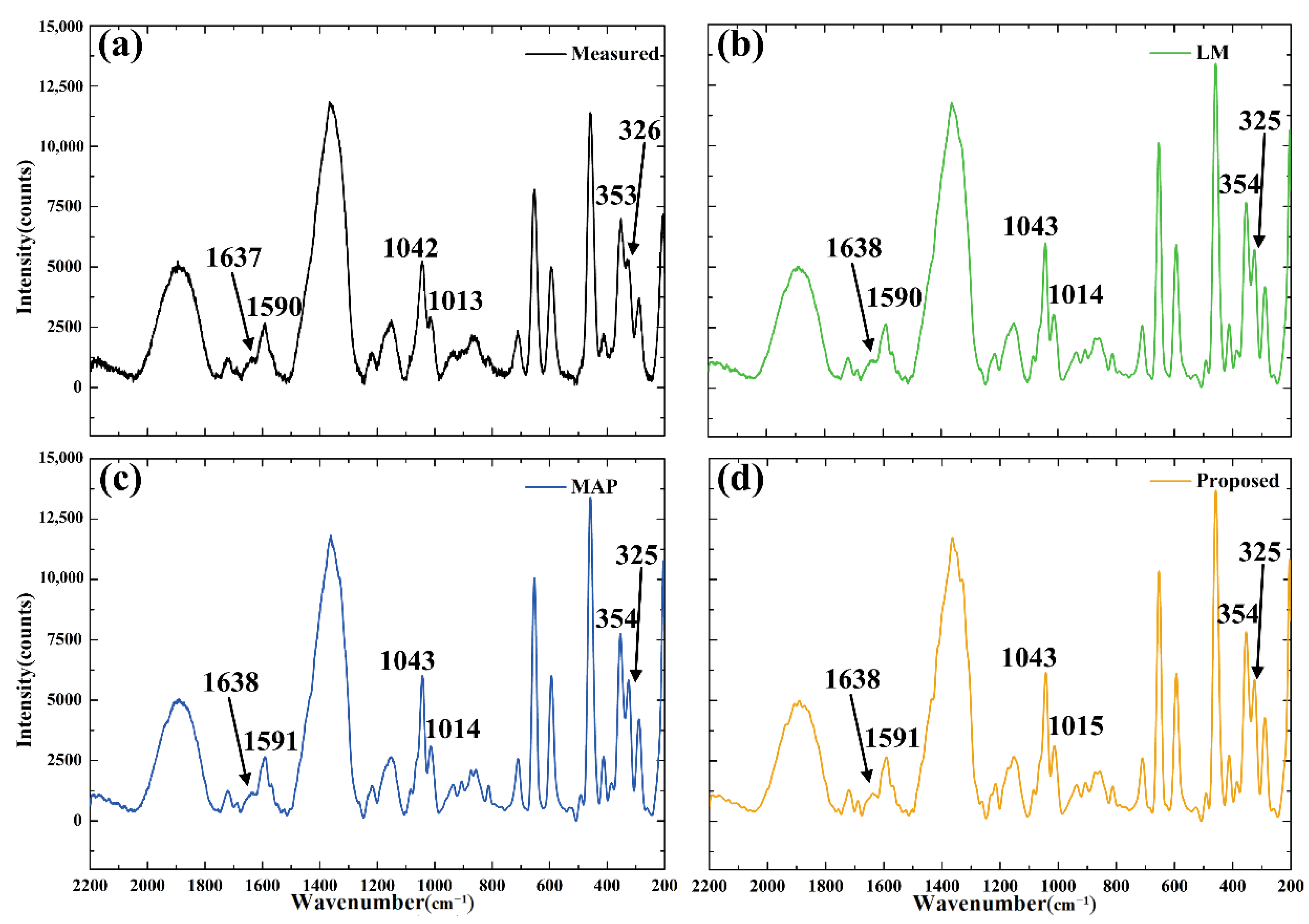
4.4. Experiments
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yang, Z.; Albrow-Owen, T.; Cai, W.; Hasan, T. Miniaturization of optical spectrometers. Science 2021, 371, eabe0722. [Google Scholar] [CrossRef] [PubMed]
- Wang, H.; Nan, L.; Huang, H.; Yang, P.; Song, H.; Han, J.; Wu, Y.; Yan, T.; Yuan, Z.; Chen, Y. Adaptive measurement method for miniature spectrometers used in cold environments. Appl. Opt. 2017, 56, 8029–8039. [Google Scholar] [CrossRef] [PubMed]
- Bandeliuk, O.; Assaf, A.; Bittel, M.; Durand, M.; Thouand, G. Development and Automation of a Bacterial Biosensor to the Targeting of the Pollutants Toxic Effects by Portable Raman Spectrometer. Sensors 2022, 22, 4352. [Google Scholar] [CrossRef] [PubMed]
- Jadidi, A.; Mi, Y.; Sikström, F.; Nilsen, M.; Ancona, A. Beam Offset Detection in Laser Stake Welding of Tee Joints Using Machine Learning and Spectrometer Measurements. Sensors 2022, 22, 3881. [Google Scholar] [CrossRef] [PubMed]
- Merrick, T.; Bennartz, R.; Jorge, M.; Pua, S.; Rausch, J. Evaluation of Plant Stress Monitoring Capabilities Using a Portable Spectrometer and Blue-Red Grow Light. Sensors 2022, 22, 3441. [Google Scholar] [CrossRef]
- Otto, C.; Grauw, C.; Duindam, J.; Sijtsema, N.; Greve, J. Applications of Micro-Raman Imaging in Biomedical Research. J. Raman Spectrosc. 2017, 28, 143–150. [Google Scholar] [CrossRef]
- Hidi, I.; Grjasnow, A.; John, H.; Weber, K.; Popp, J.; Hauswald, W. Noise Sources and Requirements for Confocal Raman Spectrometers in Biosensor Applications. Sensors 2021, 21, 5067. [Google Scholar] [CrossRef]
- Yang, D.; Liu, Q.; Guo, J.; Wu, L.; Kong, A. Cavity Enhanced Multi-Channels Gases Raman Spectrometer. Sensors 2021, 21, 3803. [Google Scholar] [CrossRef]
- Innocenti, S.; Balbas, D.; Pezzati, L.; Fontana, R.; Striova, J. Portable Sequentially Shifted Excitation Raman Spectroscopy to Examine Historic Powders Enclosed in Glass Vials. Sensors 2022, 22, 3560. [Google Scholar] [CrossRef]
- Kauppinen, J.; Moffatt, D.; Cameron, D.; Mantsch, H. Noise in Fourier self-deconvolution. Appl. Opt. 1981, 20, 1866–1879. [Google Scholar] [CrossRef]
- Lórenz-Fonfría, V.; Villaverde, J.; Padrós, E. Fourier Deconvolution in Non-self-deconvolving Conditions. Effective Narrowing, Signal-to-Noise Degradation, and Curve Fitting. Appl. Spectroc. 2002, 56, 232–242. [Google Scholar] [CrossRef]
- Lórenz-Fonfría, V.; Padrós, E. The Role and Selection of the Filter Function in Fourier Self-Deconvolution Revisited. Appl. Spectroc. 2009, 63, 791–799. [Google Scholar] [CrossRef] [PubMed]
- Stearns, E.; Stearns, R. An example of a method for correcting radiance data for bandpass error. Color Res. Appl. 1988, 13, 257–259. [Google Scholar] [CrossRef]
- Woolliams, E.; Baribeau, R.; Bialek, A.; Cox, M. Spectrometer bandwidth correction for generalized bandpass functions. Metrologia 2011, 48, 164–172. [Google Scholar] [CrossRef]
- Yuan, J.; Hu, Z. High-order statistical blind deconvolution of spectroscopic data with a Gauss-Newton algorithm. Appl. Spectrosc. 2006, 60, 692–697. [Google Scholar] [CrossRef] [PubMed]
- Reiter, J. An algorithm for deconvolution by the maximum entropy method with astronomical applications. J. Comput. Phys. 1992, 103, 169–183. [Google Scholar] [CrossRef]
- Fish, D.; Brinicombe, A.; Walker, R. Blind deconvolution by means of the Richardson–Lucy algorithm. J. Opt. Soc. Am. A 1995, 12, 58–65. [Google Scholar] [CrossRef] [Green Version]
- Kennett, T.; Prestwich, W.; Robertson, A. Bayesian deconvolution I: Convergent properties. Nucl. Instrum. Methods 1978, 151, 285–292. [Google Scholar] [CrossRef]
- Kennett, T.; Prestwich, W.; Robertson, A. Bayesian deconvolution II: Noise properties. Nucl. Instrum. Methods 1978, 151, 293–301. [Google Scholar] [CrossRef]
- Kennett, T.; Prestwich, W.; Robertson, A. Bayesian deconvolution III: Applications and algorithm implementation. Nucl. Instrum. Methods 1978, 153, 125–135. [Google Scholar] [CrossRef]
- Hansen, P. Analysis of Discrete Ill-Posed Problems by Means of the L-Curve. SIAM Rev. 1992, 34, 561–580. [Google Scholar] [CrossRef]
- Eichstädt, S.; Schmähling, F.; Wübbeler, G.; Anhalt, K.L.; Bünger, L.; Krüger, U.; Elster, C. Comparison of the Richardson-Lucy method and a classical approach for spectrometer bandpass correction. Metrologia 2013, 50, 107–118. [Google Scholar] [CrossRef]
- Jin, S.; Huang, C.; Xia, G.; Hu, M.; Liu, Z. Bandwidth correction in the spectral measurement of light-emitting diodes. J. Opt. Soc. Am. A 2017, 34, 1476–1480. [Google Scholar] [CrossRef]
- Levenberg, K. A method for the solution of certain non-linear problems in least squares. Q. Appl. Math. 1944, 2, 164–168. [Google Scholar] [CrossRef] [Green Version]
- Marquardt, D. An Algorithm for Least-Squares Estimation of Nonlinear Parameters. J. Soc. Ind. Appl. Math. 1963, 11, 431–441. [Google Scholar] [CrossRef]
- He, G.; Zheng, L. A model for LED spectra at different drive currents. Chin. Opt. Lett. 2010, 8, 1090–1094. [Google Scholar] [CrossRef]
- Huang, C.; Chang, Y.; Han, L.; Chen, F.; Hong, J. Bandwidth correction of spectral measurement based on Levenberg–Marquardt algorithm with improved Tikhonov regularization. Appl. Opt. 2019, 58, 2166–2173. [Google Scholar] [CrossRef]
- Liu, H.; Zhang, T.; Yan, L.; Fang, H.; Chang, Y. A MAP-based algorithm for spectroscopic semi-blind deconvolution. Analyst 2012, 137, 3862–3873. [Google Scholar] [CrossRef]
- Liu, T.; Liu, H.; Chen, Z.; Lesgold, A. Fast Blind Instrument Function Estimation Method for Industrial Infrared Spectrometers. IEEE Trans. Ind. Inform. 2018, 14, 5268–5277. [Google Scholar] [CrossRef]
- Liu, H.; Li, Y.; Zhang, Z.; Liu, S.; Liu, T. Blind Poissonian reconstruction algorithm via curvelet regularization for an FTIR spectrometer. Opt. Express 2018, 26, 22837–22856. [Google Scholar] [CrossRef]
- Liu, T.; Liu, H.; Li, Y.; Zhang, Z.; Liu, S. Efficient Blind Signal Reconstruction with Wavelet Transforms Regularization for Educational Robot Infrared Vision Sensing. IEEE/ASME Trans. Mechatron. 2019, 24, 384–394. [Google Scholar] [CrossRef]
- Liu, H.; Zhang, Z.; Liu, S.; Liu, T.; Yan, L.; Zhang, T. Richardson–Lucy blind deconvolution of spectroscopic data with wavelet regularization. Appl. Opt. 2015, 54, 1770–1775. [Google Scholar] [CrossRef]
- Liu, H.; Liu, S.; Huang, T.; Zhang, Z.; Hu, Y.; Zhang, T. Infrared spectrum blind deconvolution algorithm via learned dictionaries and sparse representation. Appl. Opt. 2016, 55, 813–2818. [Google Scholar] [CrossRef]
- Angelini, F.; Santoro, S.; Colao, F. Chemical Identification from Raman Peak Classification Using Fuzzy Logic and Monte Carlo Simulation. Chemosensors 2022, 10, 295. [Google Scholar] [CrossRef]
- Zhao, X.; Liu, G.; Sui, Y.; Xu, M.; Tong, L. Denoising method for Raman spectra with low signal-to-noise ratio based on feature extraction. Spectrochim. Acta A 2021, 250, 119374. [Google Scholar] [CrossRef]
- Barton, S.; Ward, T.; Hennelly, B. Algorithm for optimal denoising of Raman spectra. Anal. Methods UK 2018, 10, 3759–3769. [Google Scholar] [CrossRef]
- Machado, L.; Silva, M.; Campos, J.; Silva, D.; Cancado, L.; Neto, O. Deep-learning-based denoising approach to enhance Raman spectroscopy in mass-produced graphene. J. Raman Spectrosc. 2022, 53, 863–871. [Google Scholar] [CrossRef]
- Liu, H.; Fang, S.; Zhang, Z.; Li, D.; Li, K.; Wang, J. MFDNet: COllaborative poses perception and matrix Fisher distribution for head pose estimation. IEEE Trans. Multimed. 2021, 99, 2449–2460. [Google Scholar] [CrossRef]
- Li, Z.; Liu, H.; Zhang, Z.; Liu, T.; Xiong, N. Learning knowledge graph embedding with heterogeneous relation attention networks. IEEE Trans. Neural Netw. Learn. Syst. 2021, 33, 3961–3973. [Google Scholar] [CrossRef]
- Zhang, Z.; Li, Z.; Liu, H.; Xiong, N. Multi-scale dynamic convolutional network for knowledge graph embedding. IEEE Trans. Knowl. Data Eng. 2020, 34, 2335–2347. [Google Scholar] [CrossRef]
- Hansen, D. Using deep neural networks to reconstruct non-uniformly sampled NMR spectra. J. Biomol. NMR 2019, 73, 577–585. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, D.; Hansen, A.; Yuan, C.; Li, L.; Brüschweiler, R. DEEP picker is a deep neural network for accurate deconvolution of complex two-dimensional NMR spectra. Nat. Commun. 2021, 12, 5229. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Xue, Y.; Tian, L. Deep speckle correlation: A deep learning approach toward scalable imaging through scattering media. Optica 2018, 5, 1181–1190. [Google Scholar] [CrossRef]
- Gu, Z.; Gao, Y.; Liu, X. Optronic convolutional neural networks of multi-layers with different functions executed in optics for image classification. Opt. Express 2021, 29, 5877–5889. [Google Scholar] [CrossRef] [PubMed]
- Chen, L.; Peng, B.; Gan, W.; Liu, Y. Plaintext attack on joint transform correlation encryption system by convolutional neural network. Opt. Express 2020, 28, 28154–28163. [Google Scholar] [CrossRef] [PubMed]
- Huang, C.; Xia, G.; Jin, S.; Hu, M.; Wu, S.; Xing, J. Denoising analysis of compact CCD-based spectrometer. Optik 2018, 157, 693–706. [Google Scholar] [CrossRef]
- The KnowItAll Raman Spectral Library. Available online: https://sciencesolutions.wiley.com/solutions/technique/raman/knowitall-raman-collection/ (accessed on 10 June 2022).













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Details |
|---|---|
| Spectral function type | Lorentz function |
| Numbers of peaks | 9~15 randomly generated |
| FWHM | 20~200 randomly generated |
| Peak intensity | 2000~30,000 randomly generated |
| Peak position | Randomly generated within the measurement range |
| Method | Parameter | |
|---|---|---|
| RMSE | NMSE | |
| LM | 2.82 × 102 | 3.95 × 102 |
| MAP | 3.02 × 102 | 4.38 × 102 |
| CNN | 3.17 × 102 | 4.41 × 102 |
| Proposed | 1.43 × 102 | 2.03 × 102 |
| Noise Level | Method | Parameter | |
|---|---|---|---|
| RMSE | NMSE | ||
| 10 | LM | 2.32 × 102 | 3.27 × 102 |
| MAP | 2.62 × 102 | 3.70 × 102 | |
| CNN | 2.75 × 102 | 3.84 × 102 | |
| Proposed | 1.45 × 102 | 2.04 × 102 | |
| 50 | LM | 3.42 × 102 | 4.78 × 102 |
| MAP | 3.62 × 102 | 5.14 × 102 | |
| CNN | 3.90 × 102 | 5.49 × 102 | |
| Proposed | 1.68 × 102 | 2.35 × 102 | |
| 100 | LM | 4.17 × 102 | 5.84 × 102 |
| MAP | 4.08 × 102 | 5.71 × 102 | |
| CNN | 4.66 × 102 | 6.57 × 102 | |
| Proposed | 1.76 × 102 | 2.48 × 102 | |
| 200 | LM | 5.94 × 102 | 8.32 × 102 |
| MAP | 4.97 × 102 | 7.00 × 102 | |
| CNN | 4.56 × 102 | 6.29 × 102 | |
| Proposed | 2.02 × 102 | 2.85 × 102 | |
| Sample | Method | Parameter | |
|---|---|---|---|
| RMSE | NMSE | ||
| Caffeine | LM | 1.11 × 102 | 1.58 × 102 |
| MAP | 1.02 × 102 | 1.44 × 102 | |
| Proposed | 7.24 × 101 | 1.02 × 102 | |
| Ketamine | LM | 1.00 × 102 | 1.41 × 102 |
| MAP | 9.26 × 101 | 1.31 × 102 | |
| Proposed | 7.02 × 101 | 9.83 × 101 | |
| Methamphetamine | LM | 9.47 × 101 | 1.33 × 102 |
| MAP | 8.76 × 101 | 1.24 × 102 | |
| Proposed | 7.04 × 101 | 9.79 × 101 | |
| Ibuprofen | LM | 1.05 × 102 | 1.48 × 102 |
| MAP | 1.00 × 102 | 1.42 × 102 | |
| Proposed | 6.99 × 101 | 9.86 × 101 | |
| Analytes | Measured | Method | ||
|---|---|---|---|---|
| LM | MAP | Proposed | ||
| caffeine | 0.8143 | 0.9814 | 0.9866 | 0.9979 |
| ketamine | 0.8024 | 0.9883 | 0.9917 | 0.9986 |
| methamphetamine | 0.8091 | 0.9910 | 0.9932 | 0.9983 |
| ibuprofen | 0.7962 | 0.9846 | 0.9884 | 0.9992 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, Q.; Zou, Z.; Han, L. Deep Learning-Based Spectrum Reconstruction Method for Raman Spectroscopy. Coatings 2022, 12, 1229. https://doi.org/10.3390/coatings12081229
Zhou Q, Zou Z, Han L. Deep Learning-Based Spectrum Reconstruction Method for Raman Spectroscopy. Coatings. 2022; 12(8):1229. https://doi.org/10.3390/coatings12081229
Chicago/Turabian StyleZhou, Qian, Zhiyong Zou, and Lin Han. 2022. "Deep Learning-Based Spectrum Reconstruction Method for Raman Spectroscopy" Coatings 12, no. 8: 1229. https://doi.org/10.3390/coatings12081229
APA StyleZhou, Q., Zou, Z., & Han, L. (2022). Deep Learning-Based Spectrum Reconstruction Method for Raman Spectroscopy. Coatings, 12(8), 1229. https://doi.org/10.3390/coatings12081229