Effect of Surface Topography and Structural Parameters on the Lubrication Performance of a Water-Lubricated Bearing: Theoretical and Experimental Study



Abstract
:1. Introduction
2. Theoretical Model
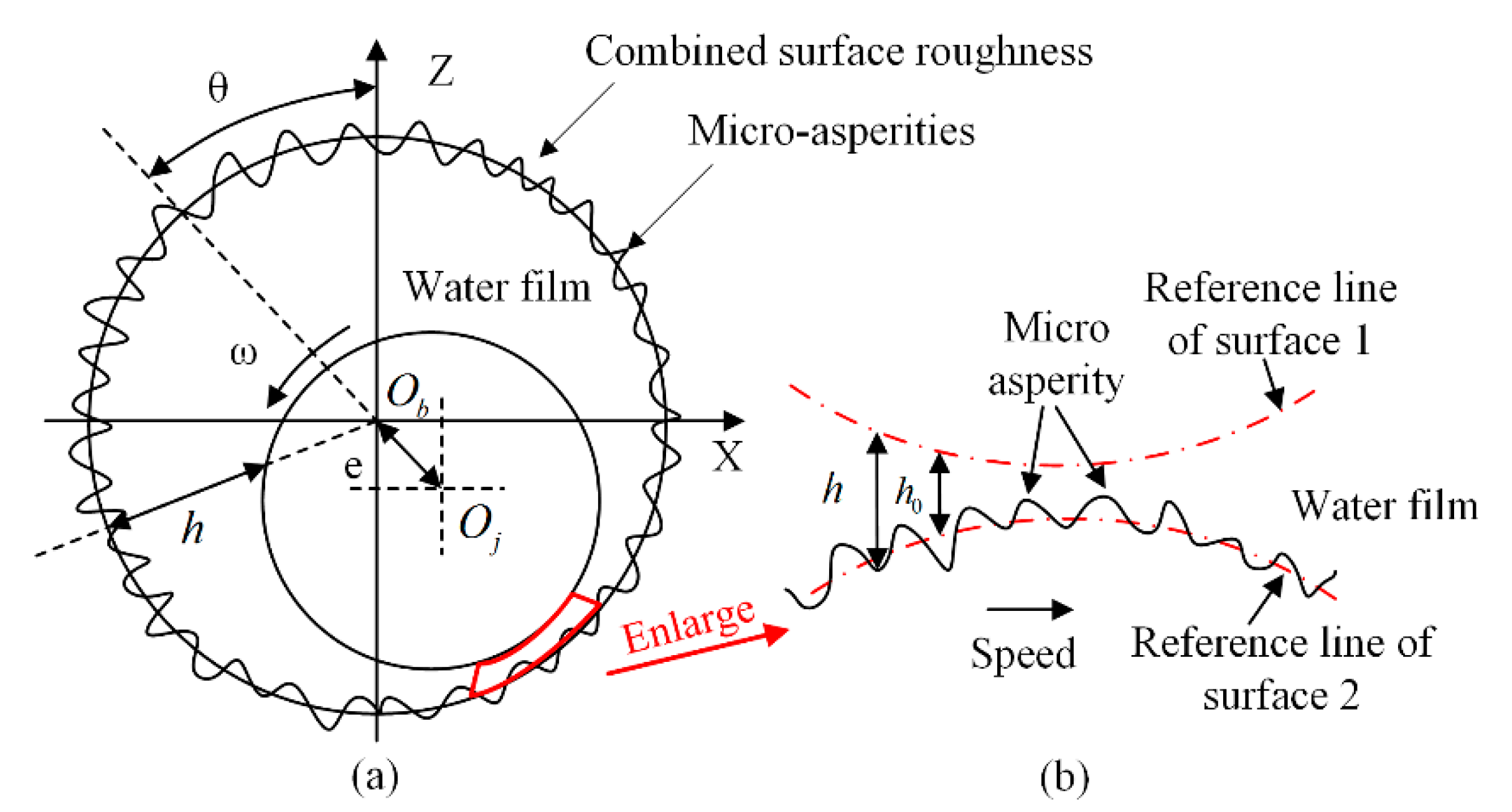
2.1. Mathematic Model
2.2. Boundary Conditions
3. Experimental Section
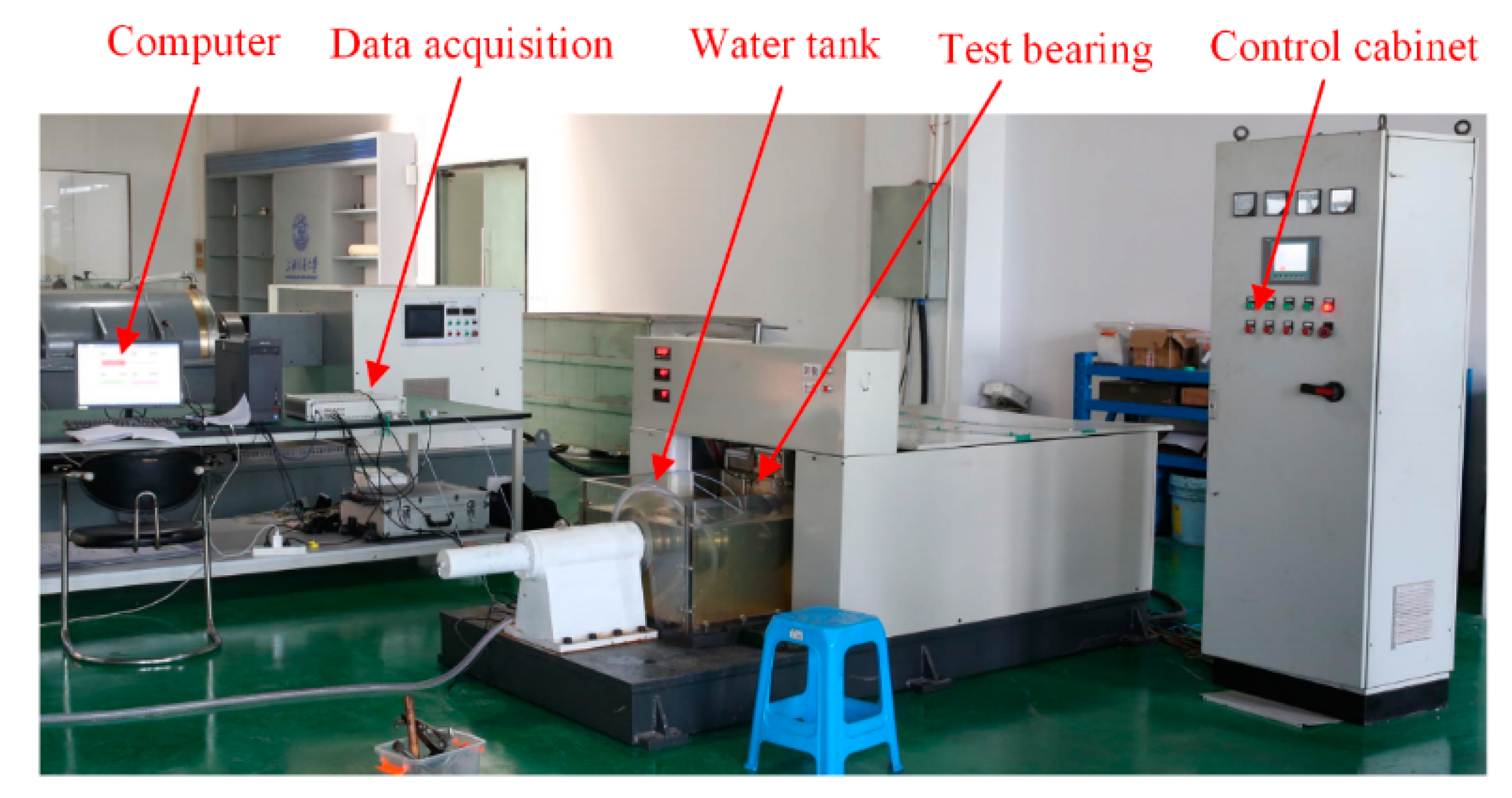
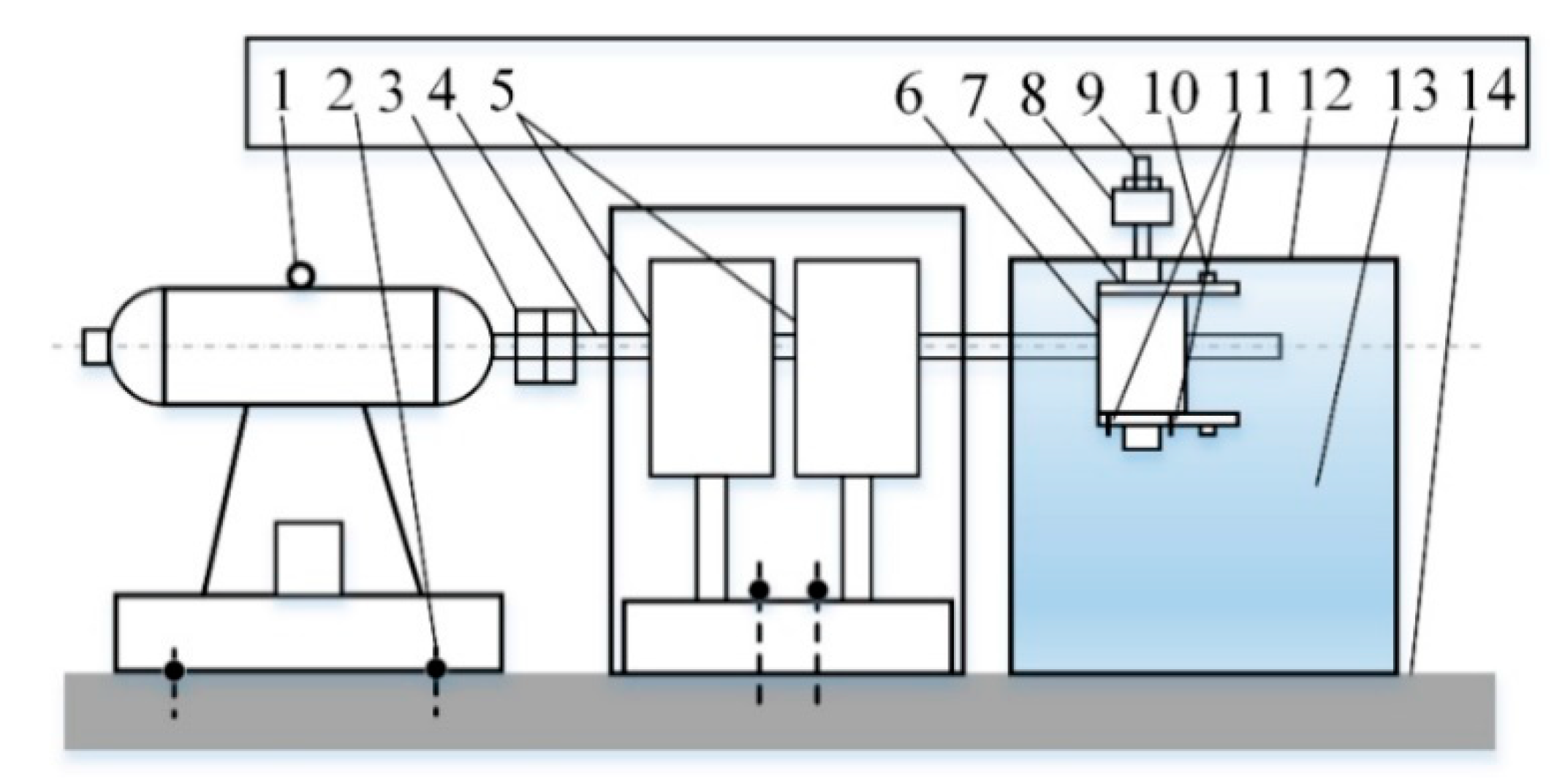
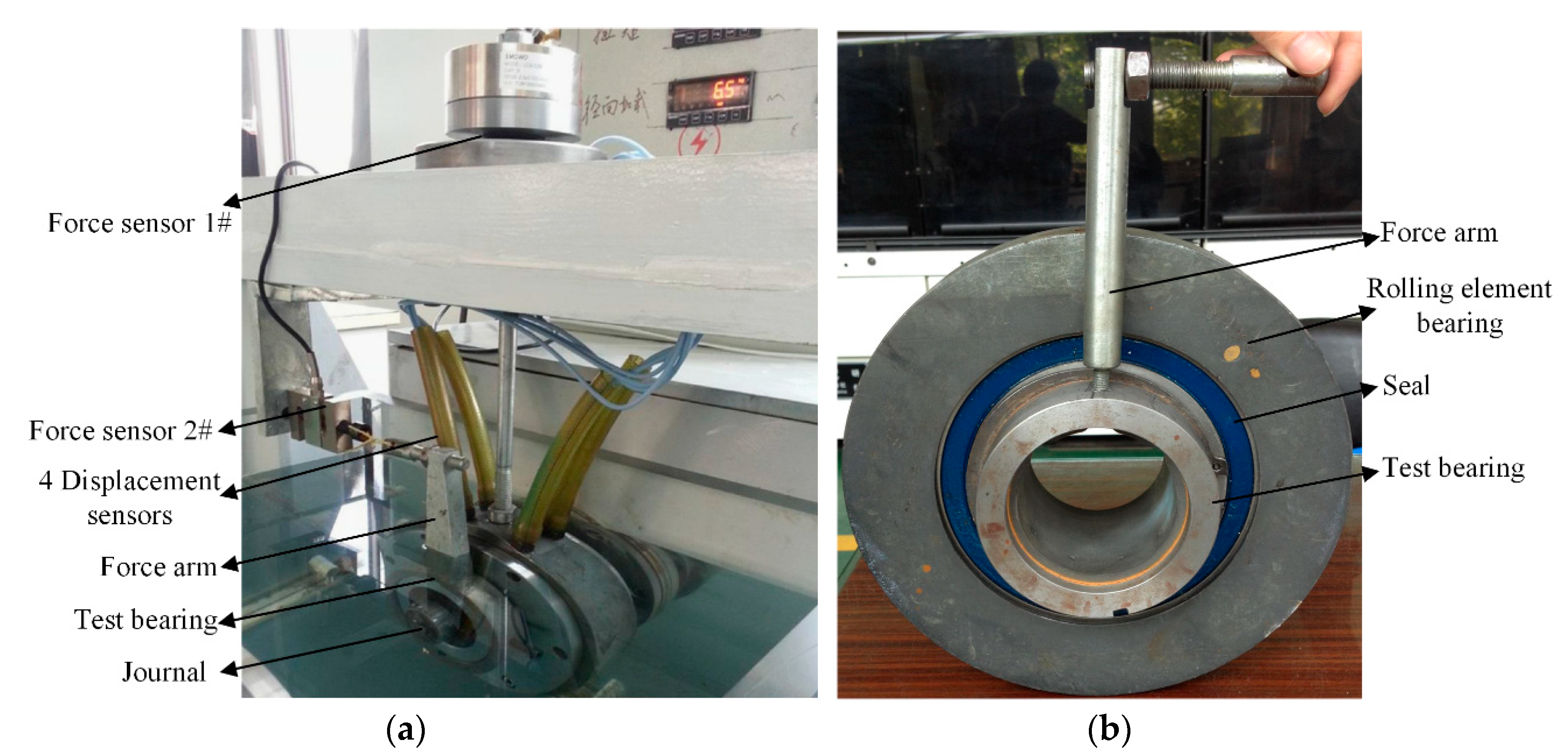
3.1. Test Apparatus
3.2. Experimental Procedure
3.3. Test Bearing
4. Results and Discussion
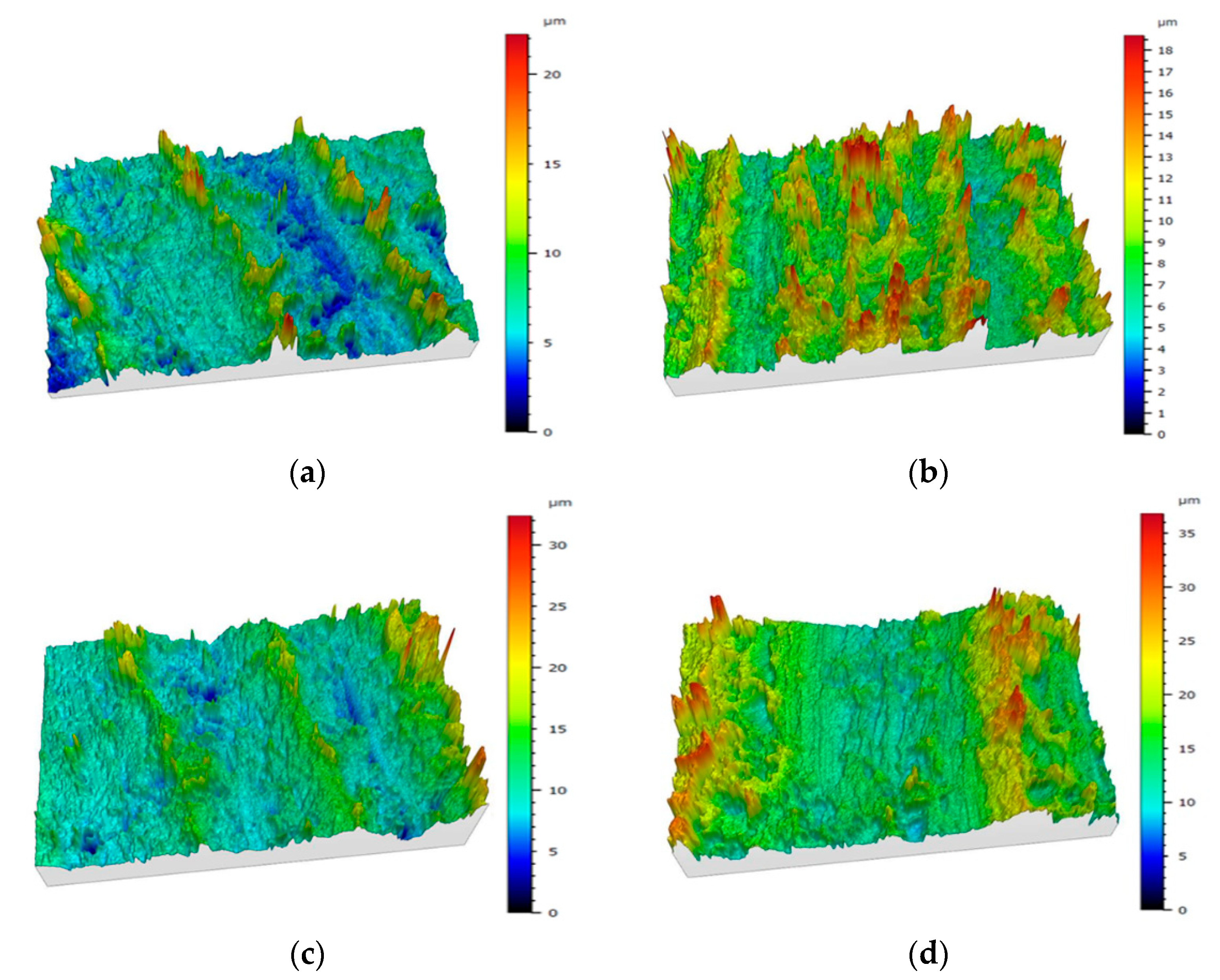
4.1. Measurement of Surface Topography
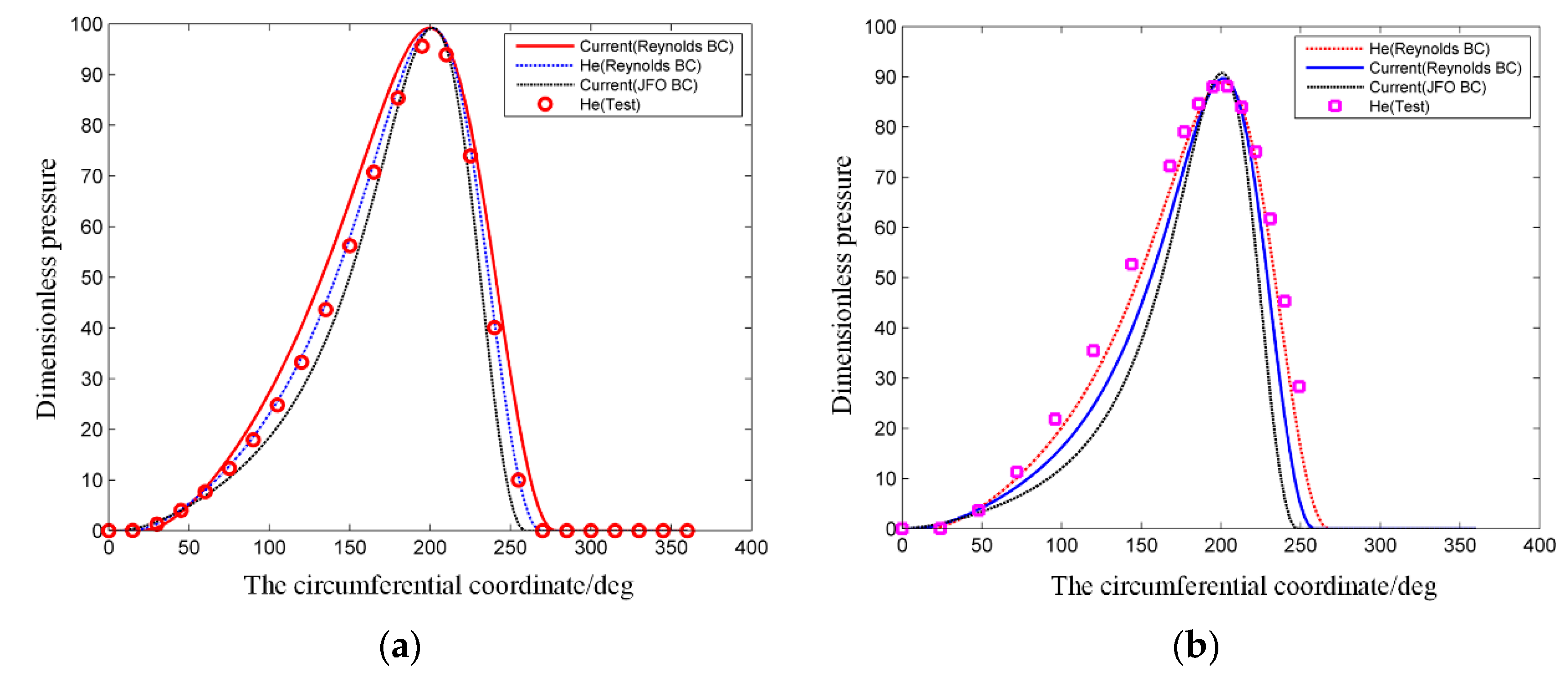
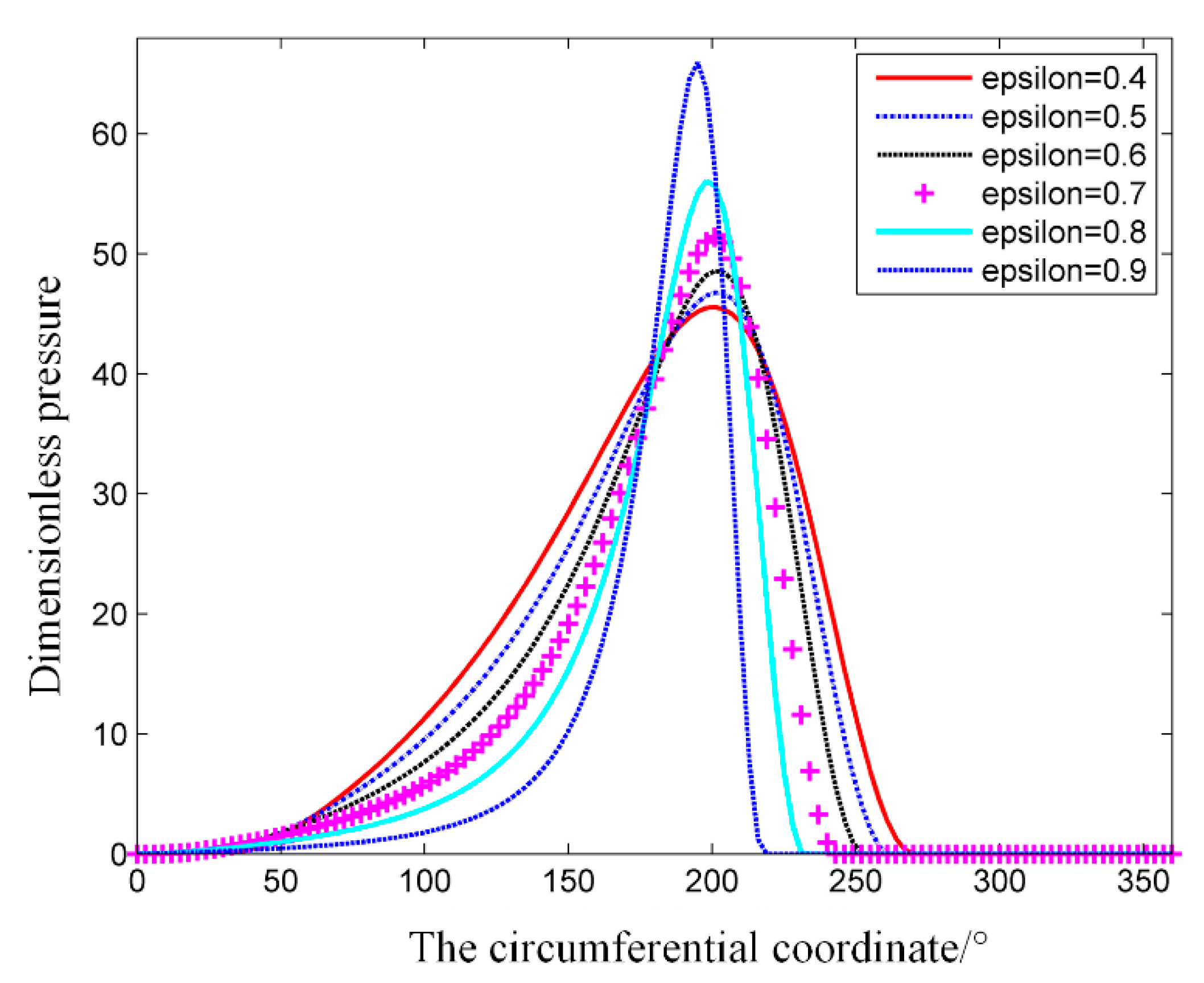
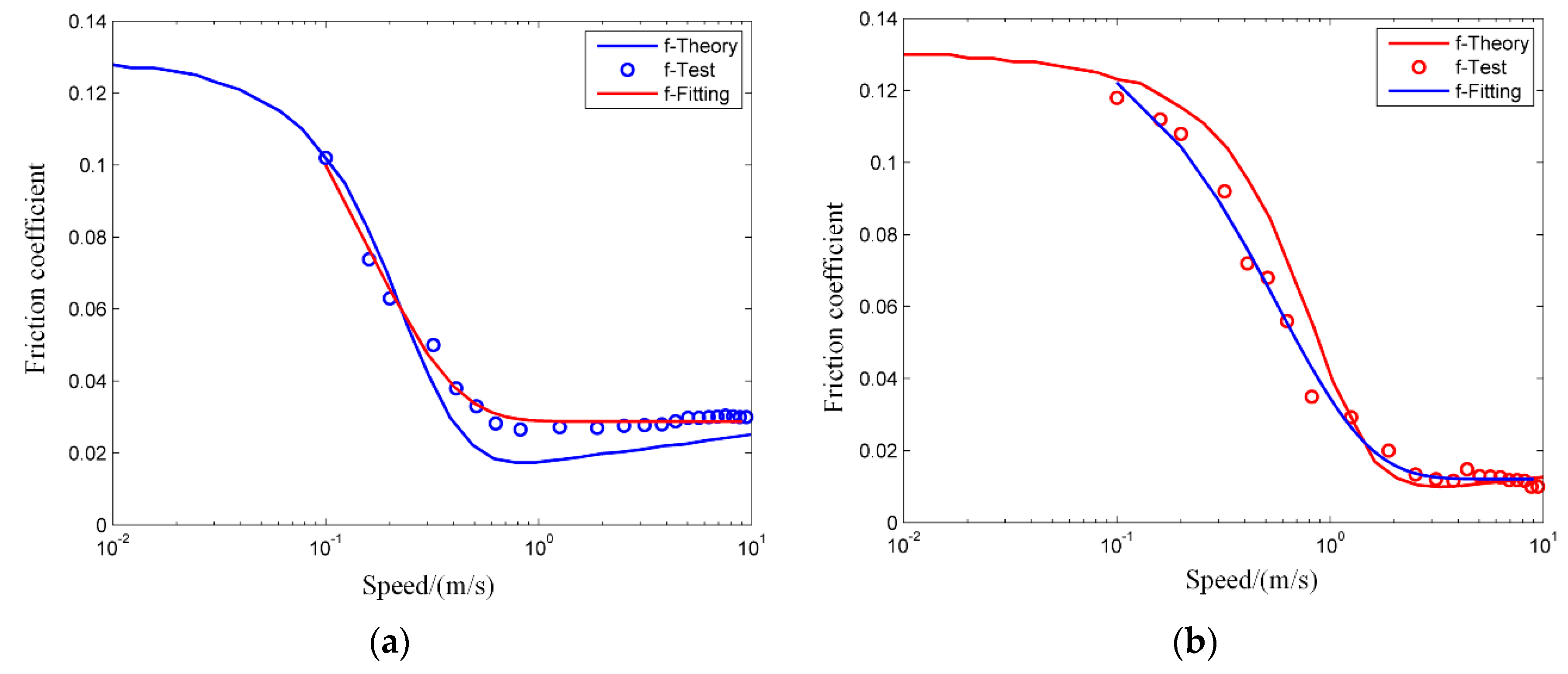
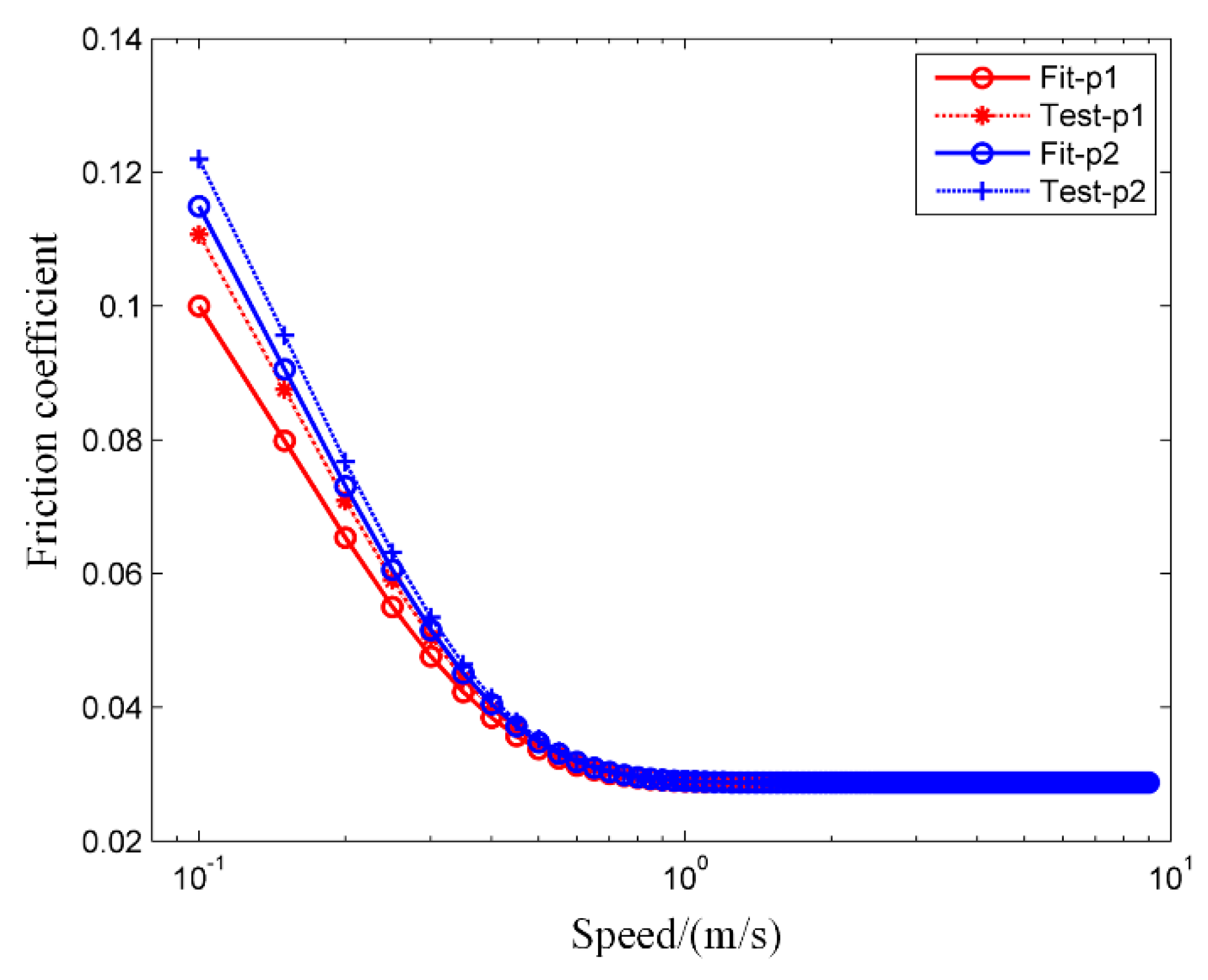
4.2. Verification of the Model
4.3. Effect of Elastic Deformation of the Bushing
4.4. Minimum Film Thickness
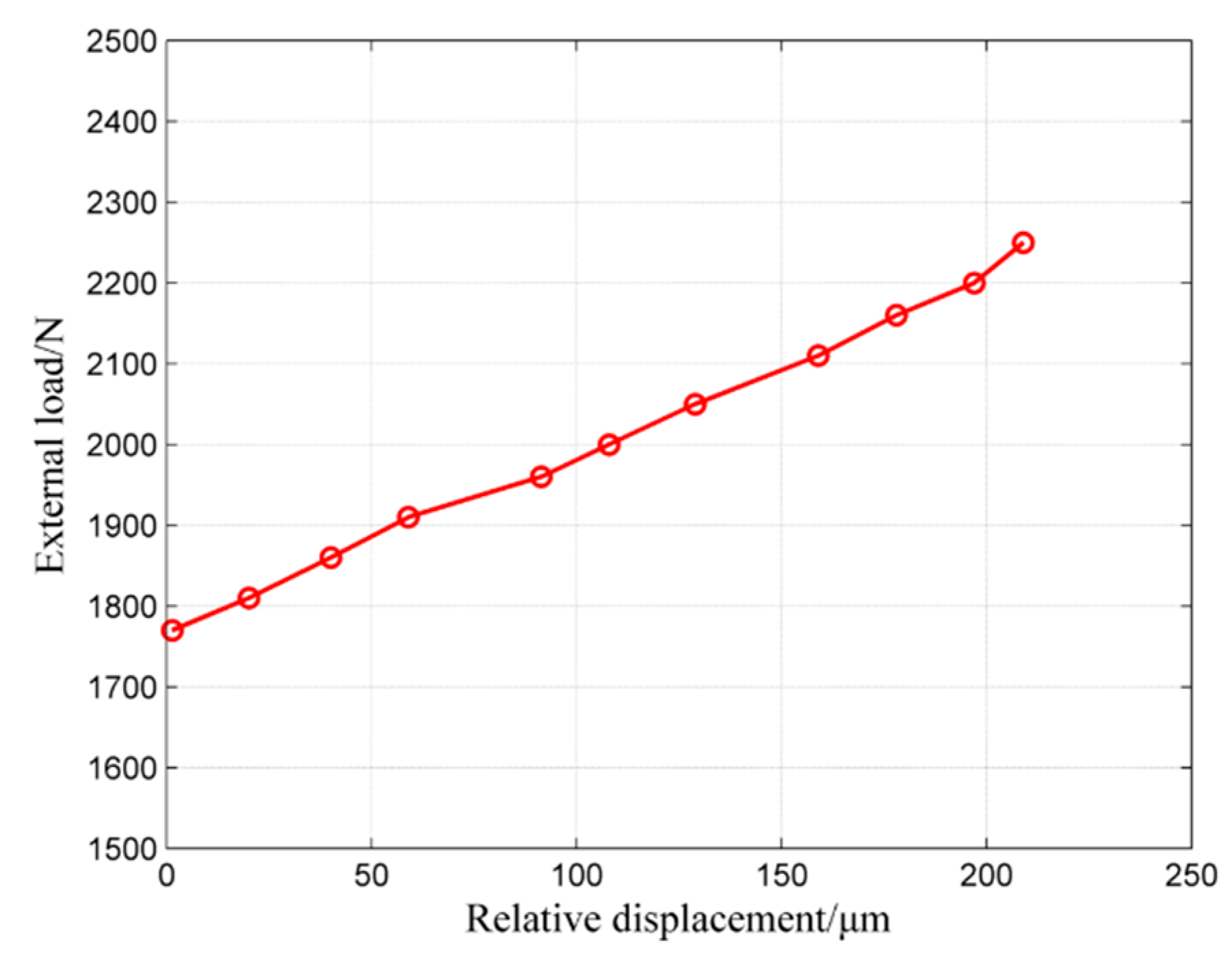
4.5. Stiffness Coefficients
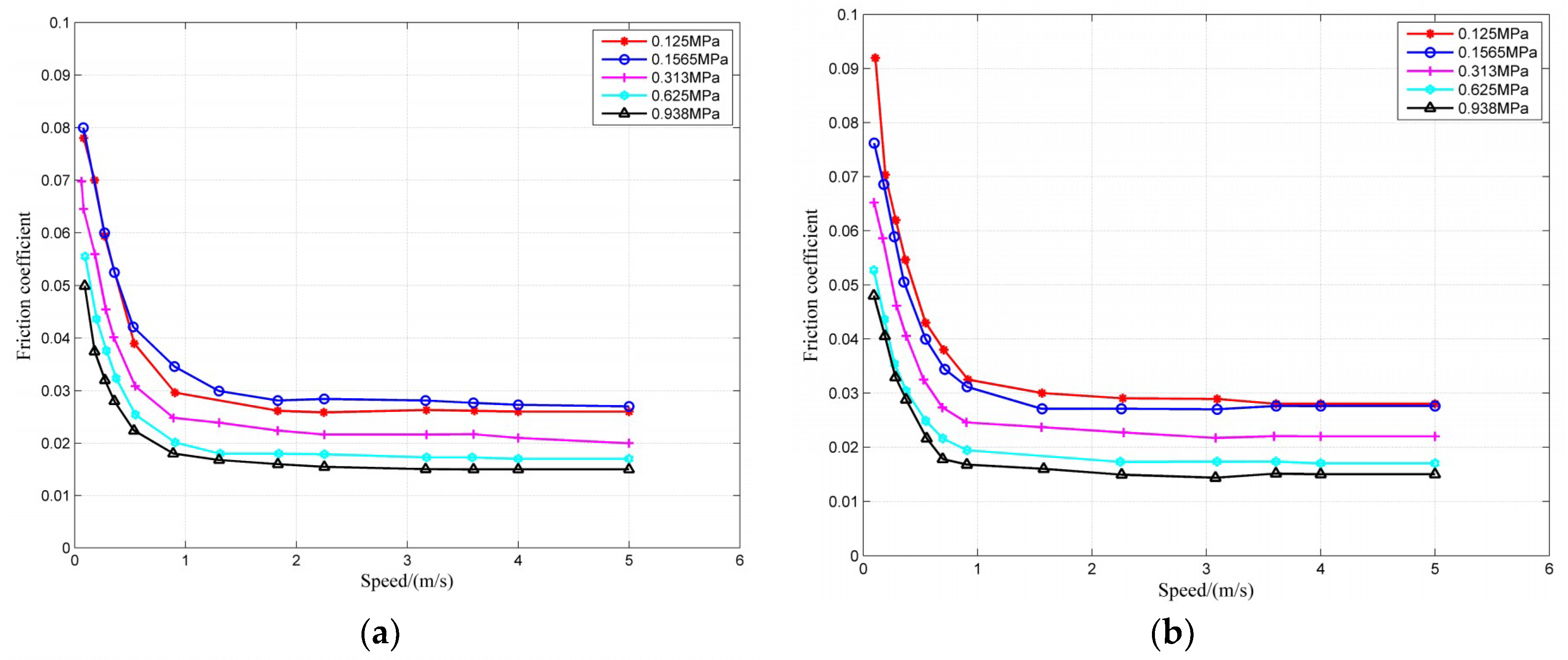
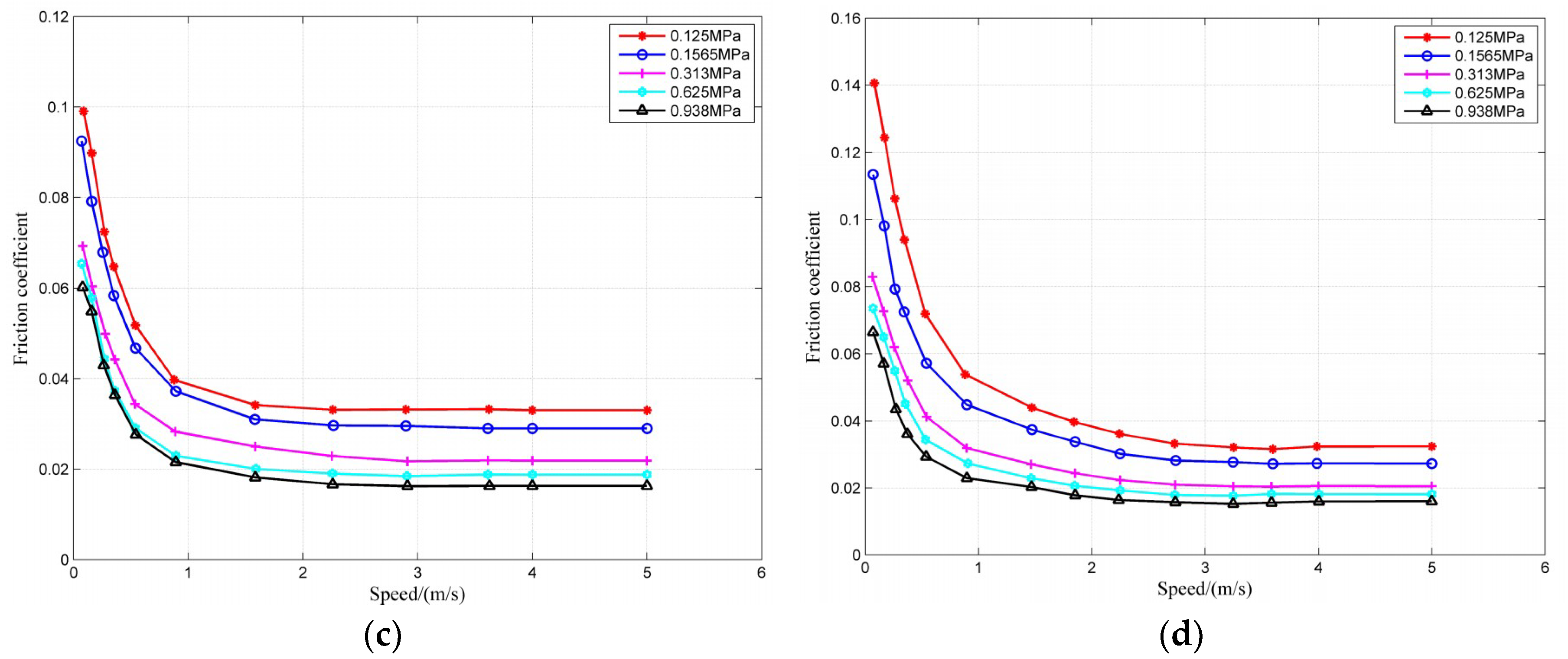
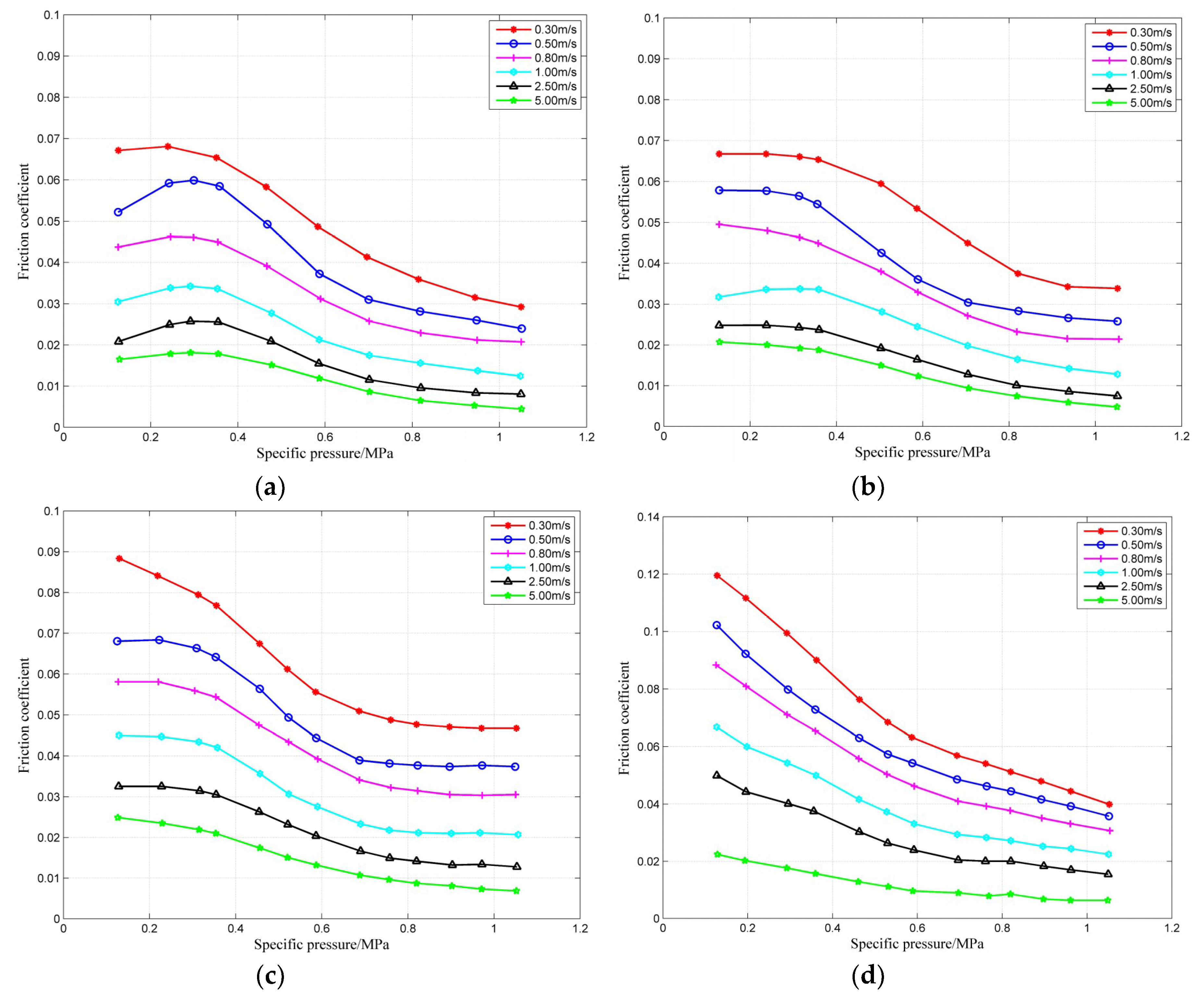
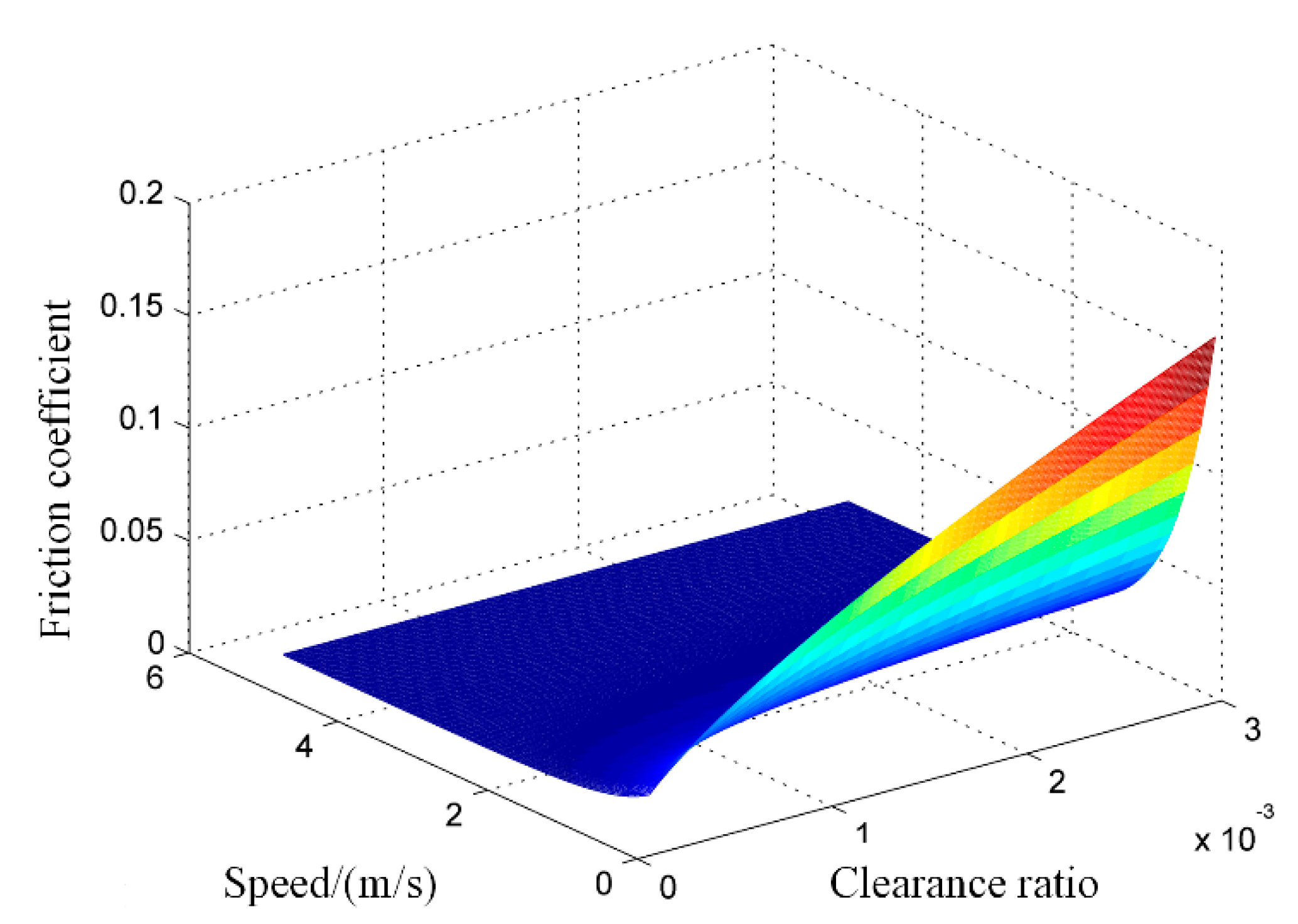
4.6. Empirical Formula of Friction Coefficient
5. Conclusions
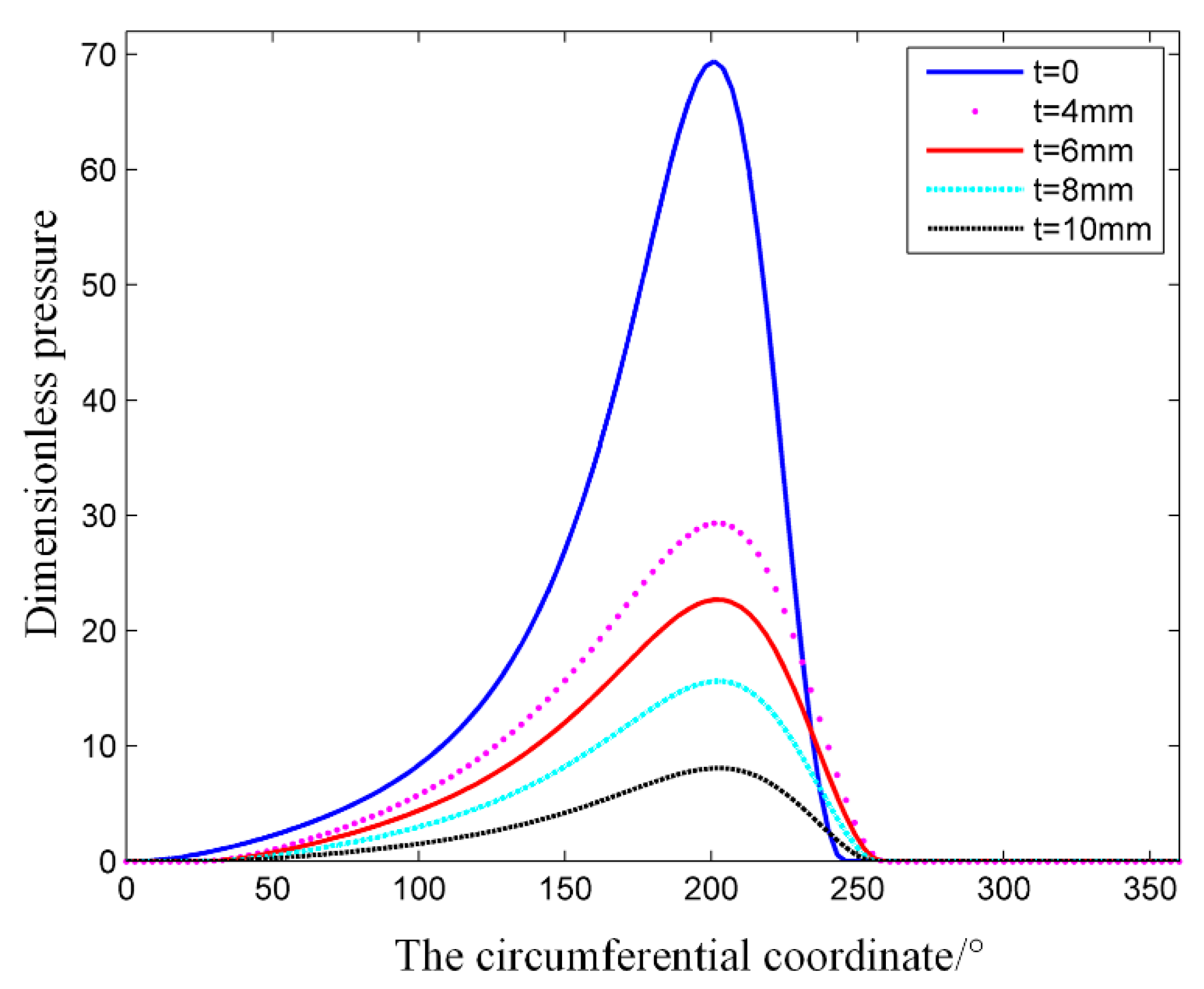
- The existence of bushing decreases the dimensionless pressure. With the increase in the bushing thickness, the dimensionless pressure decreases correspondingly;
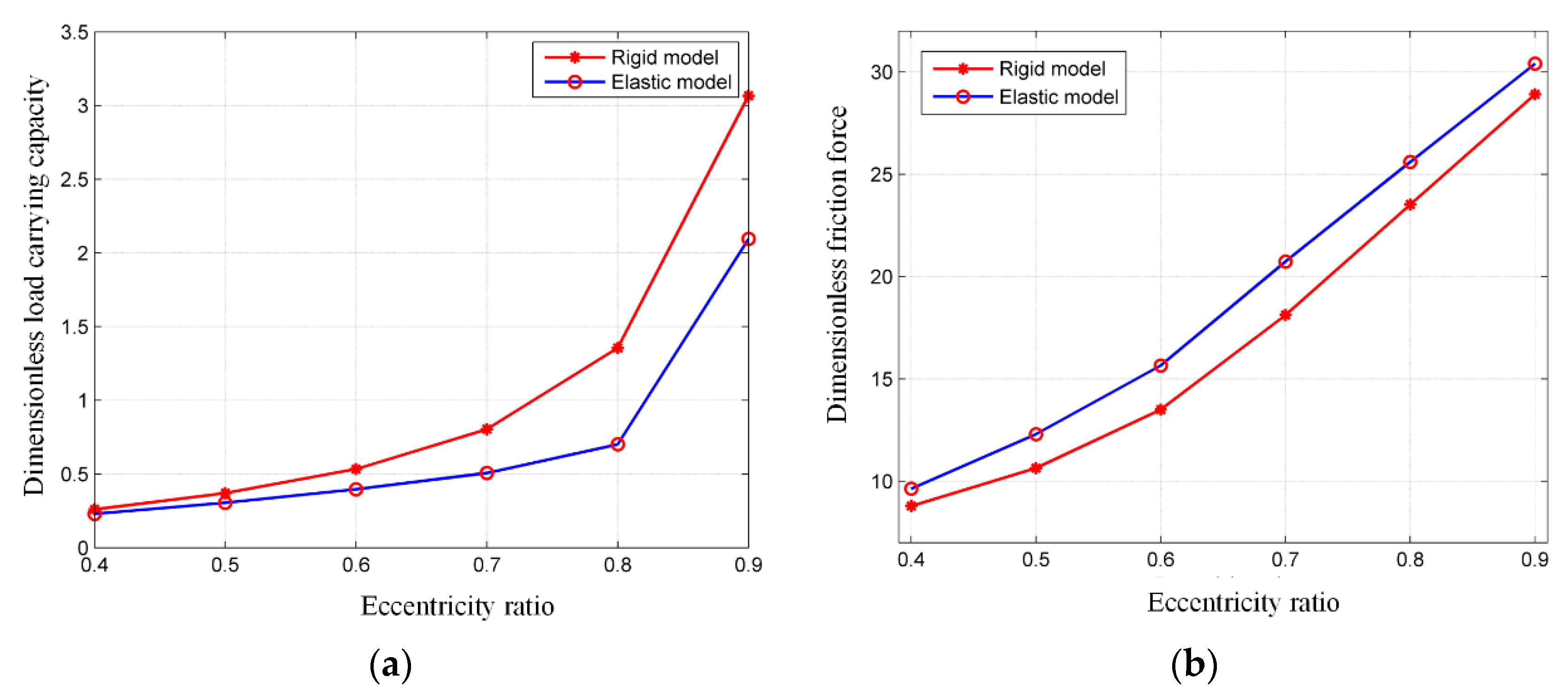
- With the increase in the eccentricity ratio, the dimensionless load-carrying capacity and the friction force increase. The existence of bushing deformation (elastic model) decreases the load-carrying capacity but increases the friction force;
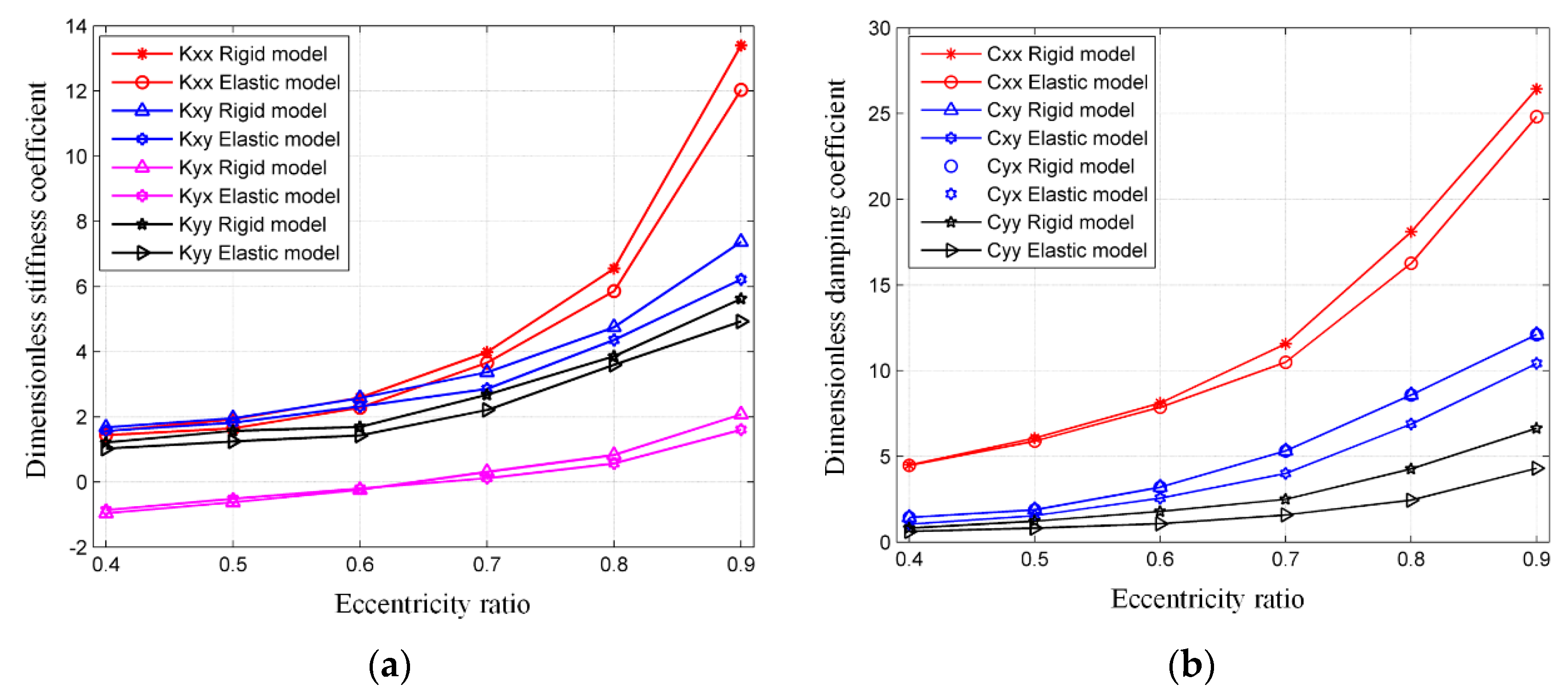
- With the increase in the eccentricity ratio, the dimensionless stiffness and damping coefficients increase. The existence of the bushing deformation (elastic model) decreases the dynamic characteristic coefficients;
- Under the same specific pressure, with the increase in the speed, the minimum film thickness increases. Under the same speed, with the increase in the specific pressure, the minimum film thickness decreases. Specific pressure and velocity are the dominant influencing factors on the measured minimum film thickness;
- The empirical formula of friction coefficient with velocity, specific pressure, and clearance ratio is obtained based on experimental data. The empirical formula is beneficial for the optimum design of structures and the prediction of tribological characteristics.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| C | radial clearance = Rb − Rj |
| Rb, Rj | bearing and journal radii |
| e | eccentricity |
| ε | eccentricity ratio, e/c |
| L, D | width and diameter of bearing |
| p | hydrodynamic pressure |
| hmin | minimum film thickness |
| δh | macroscopic elastic deformation of the bushing |
| h | real film thickness |
| h0 | nominal film thickness |
| total external load | |
| ω | angular velocity = 2πN |
| lubricant density | |
| µ | lubricant viscosity |
| Tf | tangential force |
| coefficient of stiffness | |
| bearing, journal left | |
| θ | angular coordinate |
| RMS surface roughness of two surfaces | |
| roughness height of two surfaces | |
| combined surface roughness | |
| film thickness ratio | |
| T | bushing thickness |
| E | combined elastic modulus |
| shear flow factor | |
| contact factor | |
| pressure flow factors | |
| start angle and end angle of the groove | |
| height of fluid film in the groove | |
| clearance ratio | |
| G | bearing gravity |
| coefficient of damping |
References
- Hirani, H.; Verma, M. Tribological study of elastomeric bearings for marine propeller shaft system. Tribol. Int. 2009, 42, 378–390. [Google Scholar] [CrossRef]
- Huang, W.; Xu, Y.; Zheng, Y.; Wang, X. The tribological performance of Ti(C,N)-based cermet sliding against Si3N4 in water. Wear 2011, 270, 682–687. [Google Scholar] [CrossRef]
- Wang, J.; Yan, F.; Xue, Q. Tribological behavior of PTFE sliding against steel in sea water. Wear 2009, 267, 1634–1641. [Google Scholar] [CrossRef]
- Wang, N.; Meng, Q.; Wang, P.; Geng, T.; Yuan, X. Experimental Research on Film Pressure Distribution of Water-Lubricated Rubber Bearing with Multiaxial Grooves. J. Fluids Eng. 2013, 135, 084501. [Google Scholar] [CrossRef]
- Litwin, W. Experimental research on water lubricated three layer sliding bearing with lubrication grooves in the upper part of the bush and its comparison with a rubber bearing. Tribol. Int. A 2015, 82, 153–161. [Google Scholar] [CrossRef]
- Cabrera, D.; Woolley, N.; Allanson, D.; Tridimas, Y. Film pressure distribution in water-lubricated rubber journal bearings. Proc. Inst. Mech. Eng. J J. Eng. Tribol. 2005, 219, 125–132. [Google Scholar] [CrossRef]
- Heberley, B.D. Advances in Hybrid Water-Lubricated Journal Bearings for Use in Ocean Vessels. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2013. [Google Scholar]
- Majumdar, B.; Pai, R.; Hargreaves, D. Analysis of water-lubricated journal bearings with multiple axial grooves. Proc. Inst. Mech. Eng. J J. Eng. Tribol. 2004, 218, 135–146. [Google Scholar] [CrossRef]
- Wang, X.; Adachi, K.; Otsuka, K.; Kato, K. Optimization of the surface texture for silicon carbide sliding in water. Appl. Surf. Sci. 2006, 253, 1282–1286. [Google Scholar] [CrossRef]
- Litwin, W. Influence of surface roughness topography on properties of water-lubricated polymer bearings: Experimental research. Tribol. Trans. 2011, 54, 351–361. [Google Scholar] [CrossRef]
- Wang, J.; Chen, B.; Liu, N.; Han, G.; Yan, F. Combined effects of fiber/matrix interface and water absorption on the tribological behaviors of water-lubricated polytetrafluoroethylene-based composites reinforced with carbon and basalt fibers. Compos. A Appl. Sci. Manuf. 2014, 59, 85–92. [Google Scholar] [CrossRef]
- Zhao, B.; Zhang, S.; Man, J.; Zhang, Q.; Chen, Y. A modified normal contact stiffness model considering effect of surface topography. Proc. Inst. Mech. Eng. J J. Eng. Tribol. 2015, 229, 677–688. [Google Scholar] [CrossRef]
- Pai, R.; Pai, R. Stability of four-axial and six-axial grooved water-lubricated journal bearings under dynamic load. Proc. Inst. Mech. Eng. J J. Eng. Tribol. 2008, 222, 683–691. [Google Scholar] [CrossRef]
- Zhu, D.; Wang, Q.J. On the λ ratio range of mixed lubrication. Proc. Inst. Mech. Eng. J J. Eng. Tribol. 2012, 226, 1010–1022. [Google Scholar] [CrossRef]
- Yeo, C.-D.; Katta, R.R.; Lee, J.; Polycarpou, A.A. Effect of asperity interactions on rough surface elastic contact behavior: Hard film on soft substrate. Tribol. Int. 2010, 43, 1438–1448. [Google Scholar] [CrossRef]
- Sahlin, F.; Larsson, R.; Marklund, P.; Almqvist, A.; Lugt, P. A mixed lubrication model incorporating measured surface topography. Part 2: Roughness treatment, model validation, and simulation. Proc. Inst. Mech. Eng. J J. Eng. Tribol. 2010, 224, 353–365. [Google Scholar] [CrossRef]
- Sahlin, F.; Larsson, R.; Almqvist, A.; Lugt, P.; Marklund, P. A mixed lubrication model incorporating measured surface topography. Part 1: Theory of flow factors. Proc. Inst. Mech. Eng. J J. Eng. Tribol. 2010, 224, 335–351. [Google Scholar] [CrossRef]
- Lin, J.-R.; Hsu, C.-H.; Lai, C. Surface roughness effects on the oscillating squeeze-film behavior of long partial journal bearings. Comput. Struct. 2002, 80, 297–303. [Google Scholar] [CrossRef]
- Hsu, T.-C.; Chen, J.-H.; Chiang, H.-L.; Chou, T.-L. Lubrication performance of short journal bearings considering the effects of surface roughness and magnetic field. Tribol. Int. 2013, 61, 169–175. [Google Scholar] [CrossRef]
- He, T.; Zou, D.; Lu, X.; Guo, Y.; Wang, Z.; Li, W. Mixed-lubrication analysis of marine stern tube bearing considering bending deformation of stern shaft and cavitation. Tribol. Int. 2014, 73, 108–116. [Google Scholar] [CrossRef]
- Tala-Ighil, N.; Fillon, M. A numerical investigation of both thermal and texturing surface effects on the journal bearings static characteristics. Tribol. Int. 2015, 90, 228–239. [Google Scholar] [CrossRef]
- Brito, F.P.; Miranda, A.S.; Fillon, M. Analysis of the effect of grooves in single and twin axial groove journal bearings under varying load direction. Tribol. Int. 2016, 103, 609–619. [Google Scholar] [CrossRef] [Green Version]
- Tala-Ighil, N.; Fillon, M.; Chaouche, A.B.; Mokhtari, A. Numerical study of thermal effects in the hydrodynamic behavior of textured journal bearings. AIP Conf. Proc. 2015, 1648, 850076. [Google Scholar] [CrossRef]
- Zhang, H.; Hua, M.; Dong, G.-N.; Zhang, D.-Y.; Chin, K.-S. A mixed lubrication model for studying tribological behaviors of surface texturing. Tribol. Int. 2016, 93, 583–592. [Google Scholar] [CrossRef]
- Vlădescu, S.-C.; Medina, S.; Olver, A.V.; Pegg, I.G.; Reddyhoff, T. Lubricant film thickness and friction force measurements in a laser surface textured reciprocating line contact simulating the piston ring–liner pairing. Tribol. Int. 2016, 98, 317–329. [Google Scholar] [CrossRef] [Green Version]
- Litwin, W.; Dymarski, C. Experimental research on water-lubricated marine stern tube bearings in conditions of improper lubrication and cooling causing rapid bush wear. Tribol. Int. 2016, 95, 449–455. [Google Scholar] [CrossRef]
- Zhang, X.; Yin, Z.; Gao, G.; Li, Z. Determination of stiffness coefficients of hydrodynamic water-lubricated plain journal bearings. Tribol. Int. 2015, 85, 37–47. [Google Scholar] [CrossRef]
- Illner, T.; Bartel, D.; Deters, L. Determination of the transition speed in journal bearings under consideration of bearing deformation. Tribol. Int. A 2015, 82, 58–67. [Google Scholar] [CrossRef]
- Gonçalves, D.; Graça, B.; Campos, A.V.; Seabra, J.; Leckner, J.; Westbroek, R. On the film thickness behaviour of polymer greases at low and high speeds. Tribol. Int. 2015, 90, 435–444. [Google Scholar] [CrossRef]
- Dadouche, A.; Conlon, M.J. Operational performance of textured journal bearings lubricated with a contaminated fluid. Tribol. Int. 2016, 93, 377–389. [Google Scholar] [CrossRef]
- Lu, X.; Khonsari, M.M. An Experimental Investigation of Dimple Effect on the Stribeck Curve of Journal Bearings. Tribol. Lett. 2007, 27, 169. [Google Scholar] [CrossRef]
- Tala-Ighil, N.; Fillon, M.; Maspeyrot, P. Effect of textured area on the performances of a hydrodynamic journal bearing. Tribol. Int. 2011, 44, 211–219. [Google Scholar] [CrossRef]
- Cristea, A.-F.; Bouyer, J.; Fillon, M.; Pascovici, M.D. Transient Pressure and Temperature Field Measurements in a Lightly Loaded Circumferential Groove Journal Bearing from Startup to Steady-State Thermal Stabilization. Tribol. Trans. 2017, 60, 988–1010. [Google Scholar] [CrossRef]
- Xie, Z.; Rao, Z.-S.; Liu, L.; Chen, R. Theoretical and experimental research on the friction coefficient of water lubricated bearing with consideration of wall slip effects. Mech. Ind. 2016, 17, 106–119. [Google Scholar] [CrossRef]
- Xie, Z.L.; Rao, Z.S.; Na, T.; Liu, L. Investigations on transitions of lubrication states for water lubricated bearing. Part I: Determination of friction coefficients and film thickness ratios. Ind. Lubr. Tribol. 2016, 68, 404–415. [Google Scholar] [CrossRef]
- Xie, Z.L.; Rao, Z.S.; Na, T.; Liu, L. Investigations on transitions of lubrication states for water lubricated bearing. Part II: Further insight into the film thickness ratio lambda. Ind. Lubr. Tribol. 2016, 68, 416–429. [Google Scholar] [CrossRef]
- Bungartz, H.-J.; Mehl, M.; Schäfer, M. Fluid Structure Interaction II: Modelling, Simulation, Optimization; Springer: Berlin, Germany, 2010. [Google Scholar]
- Chung, T.J. Computational Fluid Dynamics; Cambridge University Press: Cambridge, UK, 2010. [Google Scholar]
- Hamrock, B.J. Fundamentals of Fluid Film Lubrication; Marcel Dekker: New York, NY, USA, 2004. [Google Scholar]
- Szeri, A.Z. Fluid Film Lubrication; Cambridge University Press: Cambridge, UK, 2011. [Google Scholar]
- Leighton, M.; Rahmani, R.; Rahnejat, H. Surface specific flow factors for prediction of cross-hatched surfaces. Surf. Topogr. Metrol. Prop. 2016, 4, 025002. [Google Scholar] [CrossRef]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Symbol | Value | Dimension |
|---|---|---|---|
| Width | L | 80 | mm |
| Diameter | D | 62 | mm |
| L/D ratio | L/D | 1.30 | − |
| Radial clearance | C | 0.03–0.07 | mm |
| Clearance ratio | Ψ | 0.096‰–2.25‰ | − |
| Velocity | V | 0.001–10 | m/s |
| External load | F | 80–6000 | N |
| Parameter | Before/After Experiment | Unit | S1 | S2 | S3 | S4 |
|---|---|---|---|---|---|---|
| Sa | Before | µm | 1.439 (±0.0288) | 2.046 (±0.0409) | 2.107 (±0.0421) | 3.134 (±0.0627) |
| After | µm | 1.222 (±0.0244) | 1.914 (±0.0383) | 1.853 (±0.0371) | 2.238 (±0.0448) | |
| Sq | Before | µm | 1.995 (±0.0399) | 2.656 (±0.0531) | 2.821 (±0.0564) | 4.028 (±0.0842) |
| After | µm | 1.668 (±0.0334) | 2.216 (±0.0452) | 2.029 (±0.0406) | 2.870 (±0.0574) | |
| Vmp | Before | µm³/µm2 | 0.183 (±0.0037) | 0.197 (±0.0039) | 0.230 (±0.0046) | 0.323 (±0.0065) |
| After | µm³/µm2 | 0.141 (±0.0028) | 0.158 (±0.0032) | 0.208 (±0.0041) | 0.305 (±0.0061) | |
| Vvv | Before | µm³/µm2 | 0.171 (±0.0034) | 0.206 (±0.0041) | 0.254 (±0.0051 | 0.259 (±0.0052) |
| After | µm³/µm2 | 0.165 (±0.0033) | 0.162 (±0.0032) | 0.211 (±0.0042) | 0.213 (±0.0043) |
| Item | Theoretical (N/m) | Test (N/m) | Relative Error |
|---|---|---|---|
| Kyy | 2.86 × 107 | 2.10 × 107 | 26.57% |
| Kyx | 3.29 × 106 | 2.72 × 106 | 21.00% |
| Item | Range of the Value | Recommended Value |
|---|---|---|
| 0.02468–0.1206 | 0.0967 | |
| 5.5180–7.8470 | 6.6460 | |
| 0.1018–0.2226 | 0.1531 | |
| 0.1035–0.4069 | 0.2745 | |
| 0.3372–0.6800 | 0.4439 | |
| 0.02758–0.02997 | 0.0288 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xie, Z.; Rao, Z.; Liu, H. Effect of Surface Topography and Structural Parameters on the Lubrication Performance of a Water-Lubricated Bearing: Theoretical and Experimental Study. Coatings 2019, 9, 23. https://doi.org/10.3390/coatings9010023
Xie Z, Rao Z, Liu H. Effect of Surface Topography and Structural Parameters on the Lubrication Performance of a Water-Lubricated Bearing: Theoretical and Experimental Study. Coatings. 2019; 9(1):23. https://doi.org/10.3390/coatings9010023
Chicago/Turabian StyleXie, Zhongliang, Zhushi Rao, and Huanling Liu. 2019. "Effect of Surface Topography and Structural Parameters on the Lubrication Performance of a Water-Lubricated Bearing: Theoretical and Experimental Study" Coatings 9, no. 1: 23. https://doi.org/10.3390/coatings9010023
APA StyleXie, Z., Rao, Z., & Liu, H. (2019). Effect of Surface Topography and Structural Parameters on the Lubrication Performance of a Water-Lubricated Bearing: Theoretical and Experimental Study. Coatings, 9(1), 23. https://doi.org/10.3390/coatings9010023