1. Introduction
Multi-mode fibers (MMFs) like polymer optical fibers (POFs) differ from single-mode fibers (SMFs) and few-mode fibers by their potential modeling approaches. Due to the limited number of modes, the latter ones can be modeled by solving the wave equation for each possible mode individually. However, this approach is unfeasible for MMFs because of their large number of modes. For example, the typical step-index polymer optical fiber (SI-POF) can guide several million modes. Common modeling approaches for MMFs include ray tracing simulations and the power flow equation (PFE) [
1,
2,
3]. Both approaches are based on optical powers, which makes it impossible to consider interference between different modes, which occurs due to the periodicity of the electro-magnetic field. While there are approaches based on the propagation of the elctro-magnetic field in MMFs [
4,
5], working with optical powers is sufficient for POF since it is known not to maintain the polarization for fibers longer than ≈50 cm [
6]. The PFE has been used to derive the transfer function of MMFs depending on several parameters [
7]. Furthermore, the necessary coefficients describing the mode conversion and attenuation have been measured for SI-POF as well [
8]. However, the separate measurement of attenuation and mode conversion caused by scattering is not without problems. The measurement of one effect is always influenced by the other since none of them can be avoided completely. This is especially true for POF since it faces significantly more scattering than a glass optical fiber (GOF).
An additional drawback of both ray tracing and the PFE is the neglect of a ray’s skewness, which makes it impossible to distinguish between tunneling and refracted modes as proposed by Snyder and Love [
9].
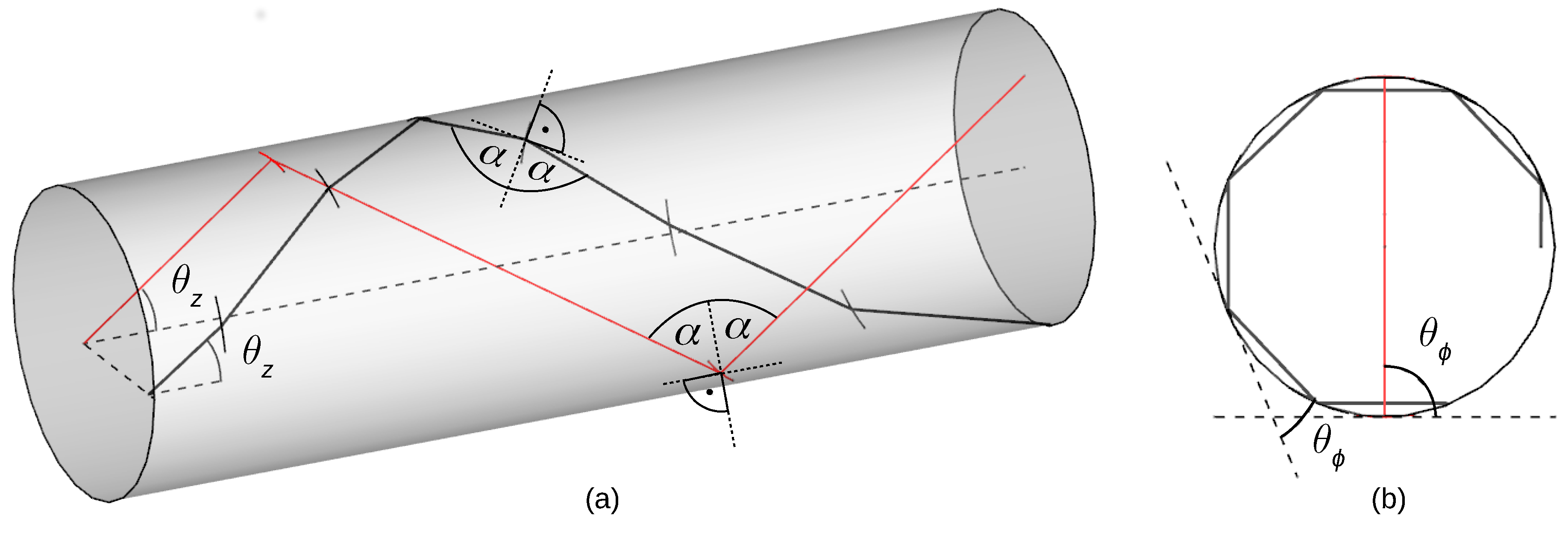
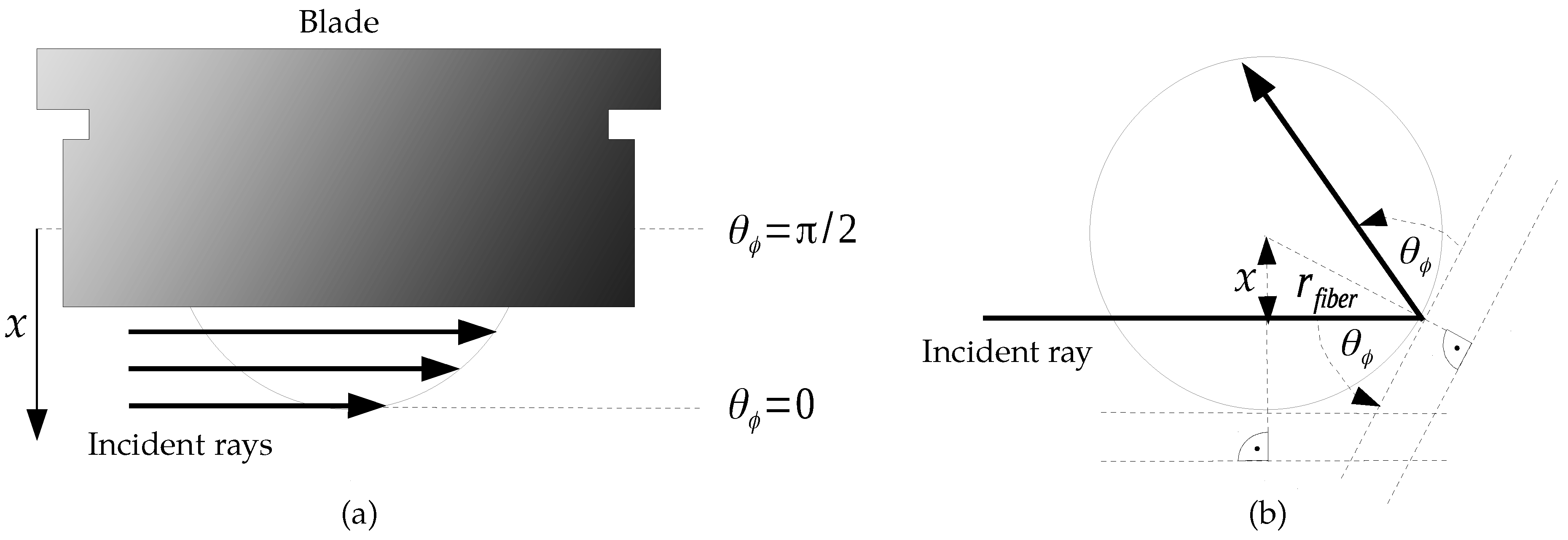
Figure 1a shows two rays with the same propagation angle
. The red ray is a meridional ray since it crosses the optical axis. It can be seen that the trajectory of the ray changes significantly when its origin is shifted towards the edge of the fiber (black ray), even though
remains constant. The resulting ray is called a skew ray. The difference between both rays can be described by the skewness
, which is the angle between the projection of a ray’s trajectory on the fiber’s front surface and the tangent at the point of reflection and is depicted in
Figure 1b. Closely related to
and
is a third angle
(
Figure 1a), which is the angle between the ray and the normal to the surface at the point of reflection.
can be expressed depending on
and
:
Due to the relation between the three angles, it is sufficient to consider only two of them to distinguish the different mode categories. For the further discussion, we choose
and
.
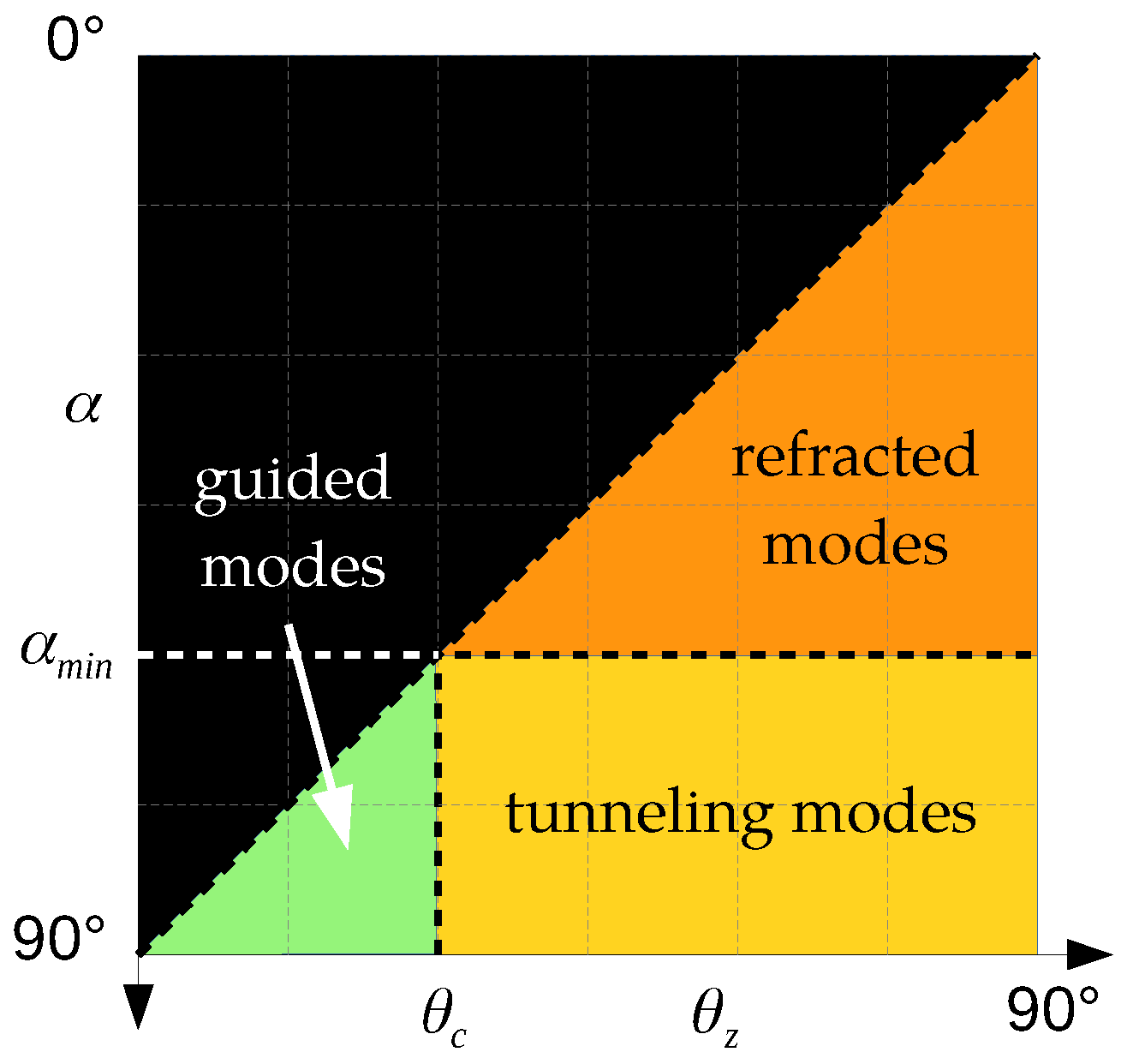
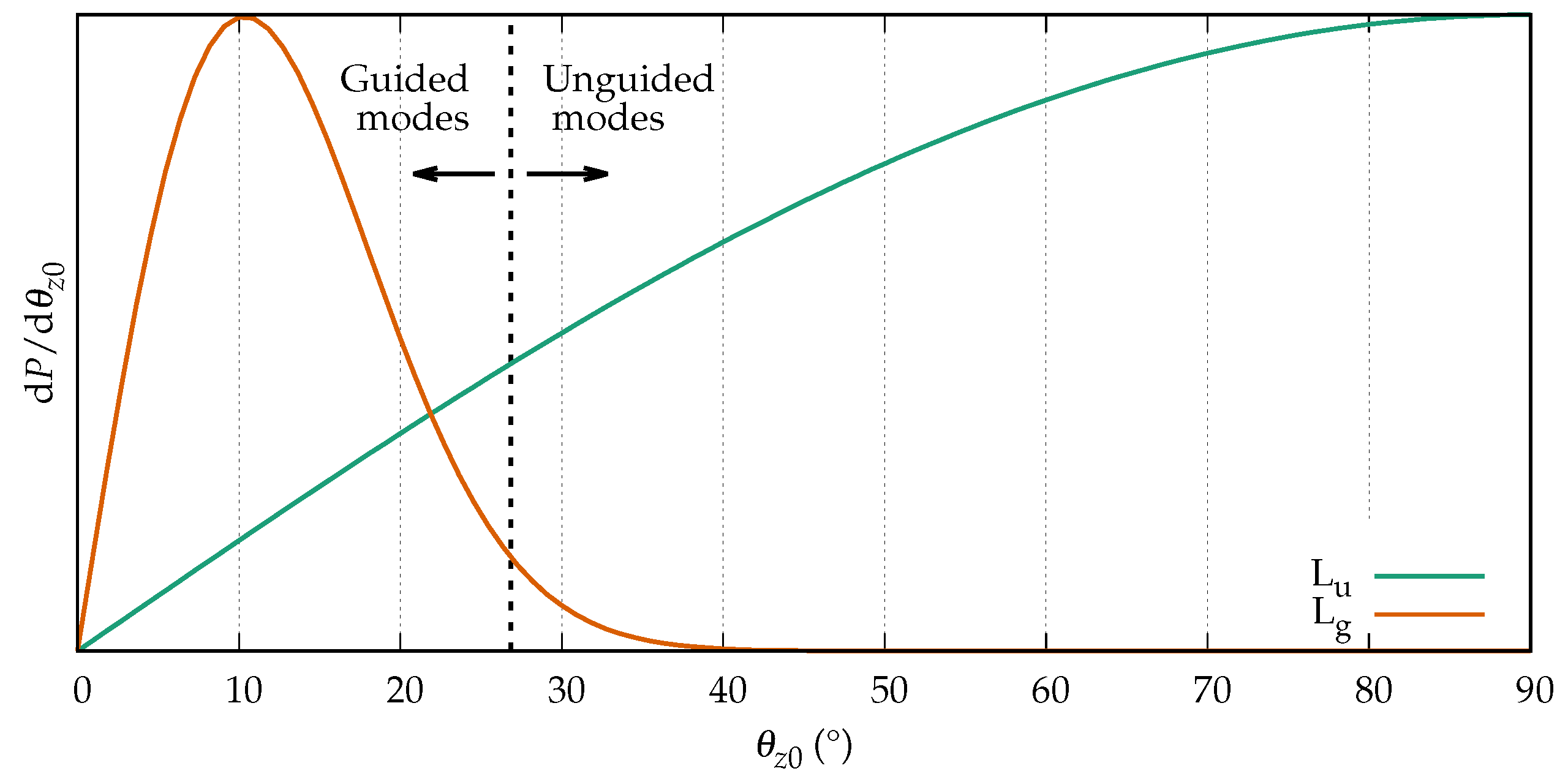
Figure 2 shows the possible mode categories with respect to the chosen angles. It is well known that a mode can only be guided if
is smaller than the maximum angle
, for which total internal reflection occurs:
is the refractive index of the core of the fiber and
is the refractive index of the cladding. If
exceeds
, the mode category depends on
. Similar to
, a minimum angle
is defined:
If exceeds , the mode is a tunneling mode and suffers therefore from a higher attenuation than a guided mode. If is smaller than , the mode is a refracted mode. The attenuation of refracted modes is even higher than for tunneling modes, which is why they only contribute to the transmission behavior of very short fibers.
The number of reflections at the core-cladding interface, which a ray faces while propagating along the fiber, depends on the skewness as can be seen from
Figure 1a. As a consequence, the scattering experienced by a mode depends on the skewness as well. The transmission behavior of a step-index multi-mode fiber (SI-MMF) therefore does not only depend on the angular power distribution of the light source over
, but also on the power distribution over
. We propose a new fiber model for SI-MMF that is capable of considering the dependency of both attenuation and scattering on both angles. This allows us to investigate the influence of the angular power distribution and the different mode categories on specific applications by evaluating the phase and amplitude response obtained from the impulse response of the simulated optical transmission system.
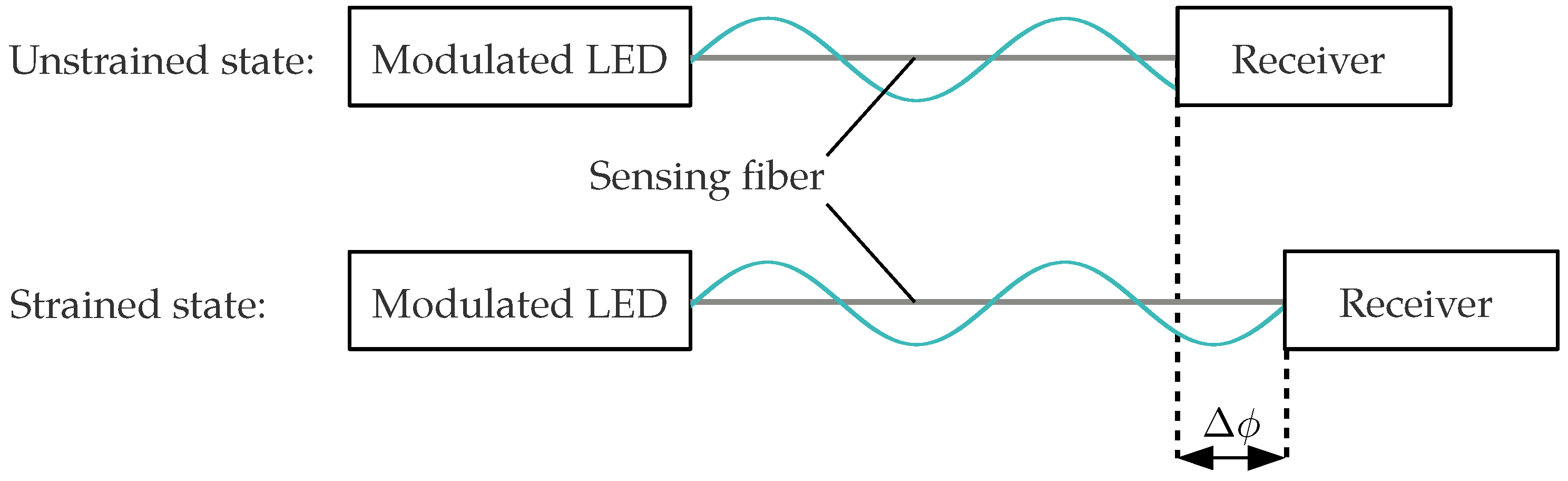
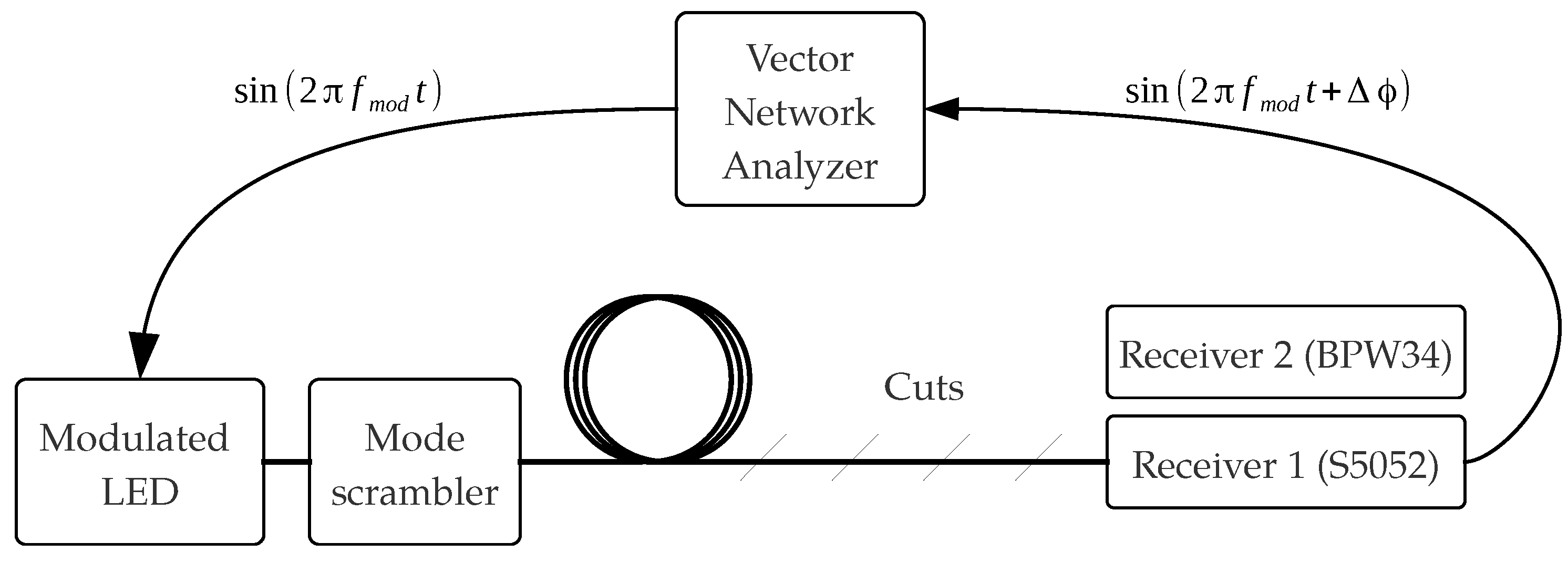
We have previously proposed an optical strain sensor based on an SI-POF [
10,
11]. An intensity-modulated LED is used to excite the fiber with a fixed modulation frequency
and the strain of the fiber can be monitored by measuring the modulation phase at the end of the fiber as shown in
Figure 3.
When the length of the fiber is changed by
, the modulation phase experiences a phase shift
. In an ideal fiber, which is free from dispersion, scattering and other parasitic influences, the modulation phase at a specific position
has a linear dependency on the position
z. As a result, the shift of the modulation phase
caused by the elongation of an ideal fiber is proportional to the length change:
However, in a real fiber, the development of the modulation phase along the fiber is not linear to the position
z and therefore not linear to the length change
as well. A measured phase change
can correspond to a different length change
at a specific position
z than it does at another. The modulation phase at the end of the fiber is exposed to additional influences when the fiber is actually strained as we have recently investigated [
12]. However, in order to avoid a measurement error, it is crucial to know how the real development of the modulation phase along the fiber differs from the ideal modulation phase.
We will demonstrate the application of the model by simulating the nonlinear development of the modulation phase along the fiber. For this purpose, we simulate the impulse responses at discrete positions along the sensing fiber. The impulse responses are then transferred to the frequency domain via a Fourier transform. The argument of the obtained frequency responses are the phase responses, which allows us to predict the development of the modulation phase along the sensing fiber at arbitrary modulation frequencies. Since the sensor is based on an SI-POF, the model employs scatter data we have obtained from a previously performed scatter and attenuation measurement of an SI-POF described in [
13]. The model itself is independent from the actual fiber type and can model any kind of SI-MMF as long as the required scatter and attenuation data for the specific fiber type are available.
In order to study the the impact on the development of the modulation phase, we will vary the following simulation parameters:
Finally, we will compare the simulated development of the modulation phase along the fiber to real values obtained from a cutback measurement.
3. Results and Discussion
3.1. Basic Validation of the Model
Before the model was used to simulate the behavior of an optical transmission system, several basic checks had been performed on the model to ensure its validity. The model offers the possibility to bypass the cell scatter matrices. In this case, the impulse response is only affected by chromatic and modal dispersion but not by attenuation and scattering. It was verified that the total energy carried by the impulse responses of the transmission system is maintained during the propagation. Furthermore, the power of each time interval k of the cell impulse response of each matrix cell is constant over the fiber length. Additionally, ray tracing simulations were set up to verify these ideal impulse responses using LightTools (version 8.4, Synopsys, Mountain View, CA, USA). The results obtained from LightTools matched the computed impulse responses of our model within the limits of accuracy given by the discrete nature of both approaches.
In order to classify the accuracy of the used scatter data, the attenuation of the Asahi TC-1000 was extrapolated from simulations performed with the model. The attenuation was found to be ≈250 dB/km, which is higher than the
stated by the manufacturer [
22]. However, one has to keep in mind that the used scatter data were obtained from a
piece of fiber which can introduce a relatively large measurement error. Under these conditions, we consider the obtained attenuation to be in an adequate range.
3.2. Example Simulation
For the verification of the model, we simulated the relative error of a fiber length measurement based on the phase measurement of the modulated optical power according to Equation (
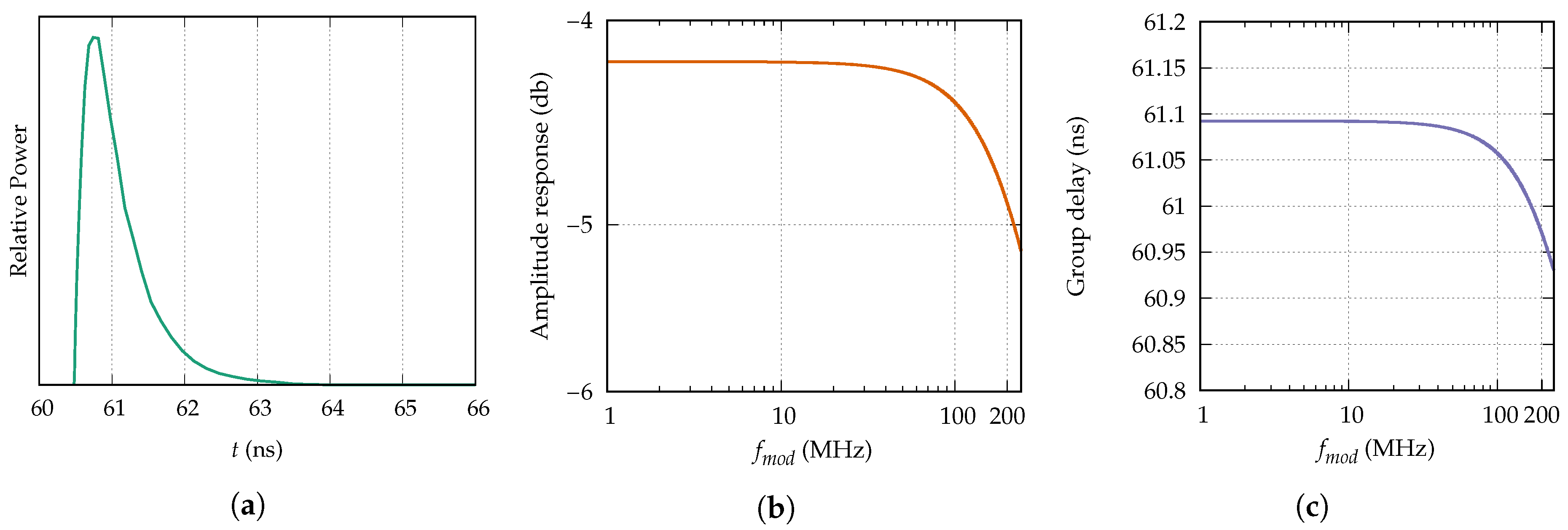
21). However, this required further processing of the impulse responses computed by the model. To get an impression of a simulated impulse response and the corresponding amplitude and phase response, we present the results of a example simulation in this section.
Figure 12a shows an impulse response computed by the model for an SI-POF with a length of
. The fiber was excited with the Gaussian power distribution
and the receiver characteristics of a BPW34 photodiode were considered. Furthermore, only guided modes were excited.
Figure 12b shows the corresponding amplitude response up to a maximum modulation frequency of 240
obtained by the DTFT as described in
Appendix B. The computed impulse response
was normalized by the energy with which the guided modes were excited. As it can be seen, the attenuation for the modulation frequency of 240
is ≈1 dB higher than for a continuous wave (CW) signal. The computed phase response
is not depicted since the deviation from the ideal phase response is so small that it is not directly observable. Therefore,
Figure 12c shows the group delay, which is the negative derivation of the phase response with respect to the angular modulation frequency:
As it can be seen, the group delay changes only a little within the depicted frequency range.
3.3. Results of the Simulations
We used the relative error as given by Equation (
21) to determine the accuracy of the fiber length obtained from a phase measurement, when influences like modal dispersion are not considered. Therefore, the influence of impacts like modal and chromatic dispersion, the launching condition and the angular receiver sensitivity on the accuracy of a phase based length or strain sensors can be evaluated. Unless stated otherwise, all simulations were evaluated at a modulation frequency of
. Since we were working with an LED,
was close to the maximum achievable modulation frequency.
3.3.1. Influence of Light Source, Receiver and Mode Categories
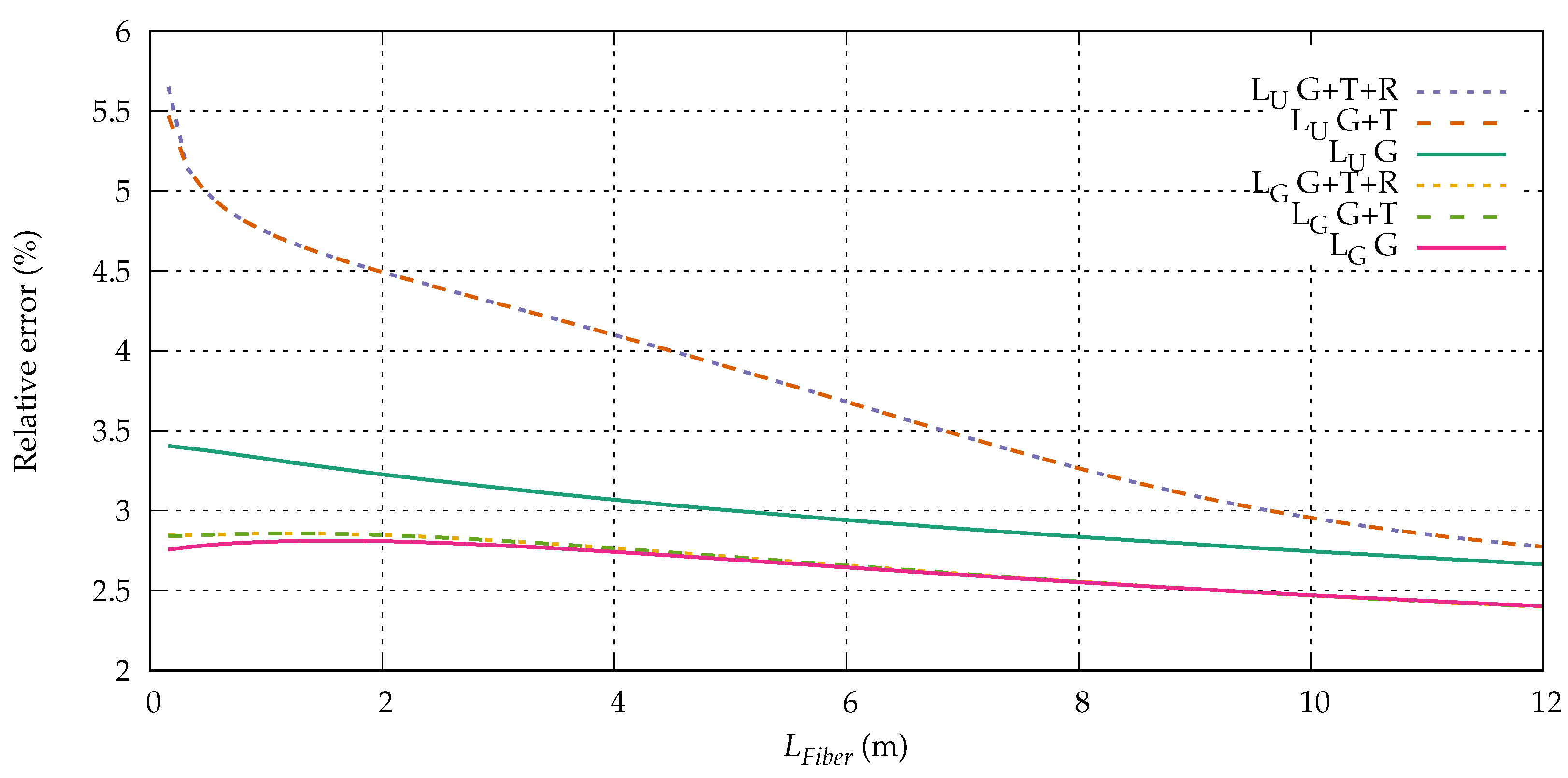
Figure 13 shows the relative error up to a length of
simulated with both launching conditions
(uniform distribution) and
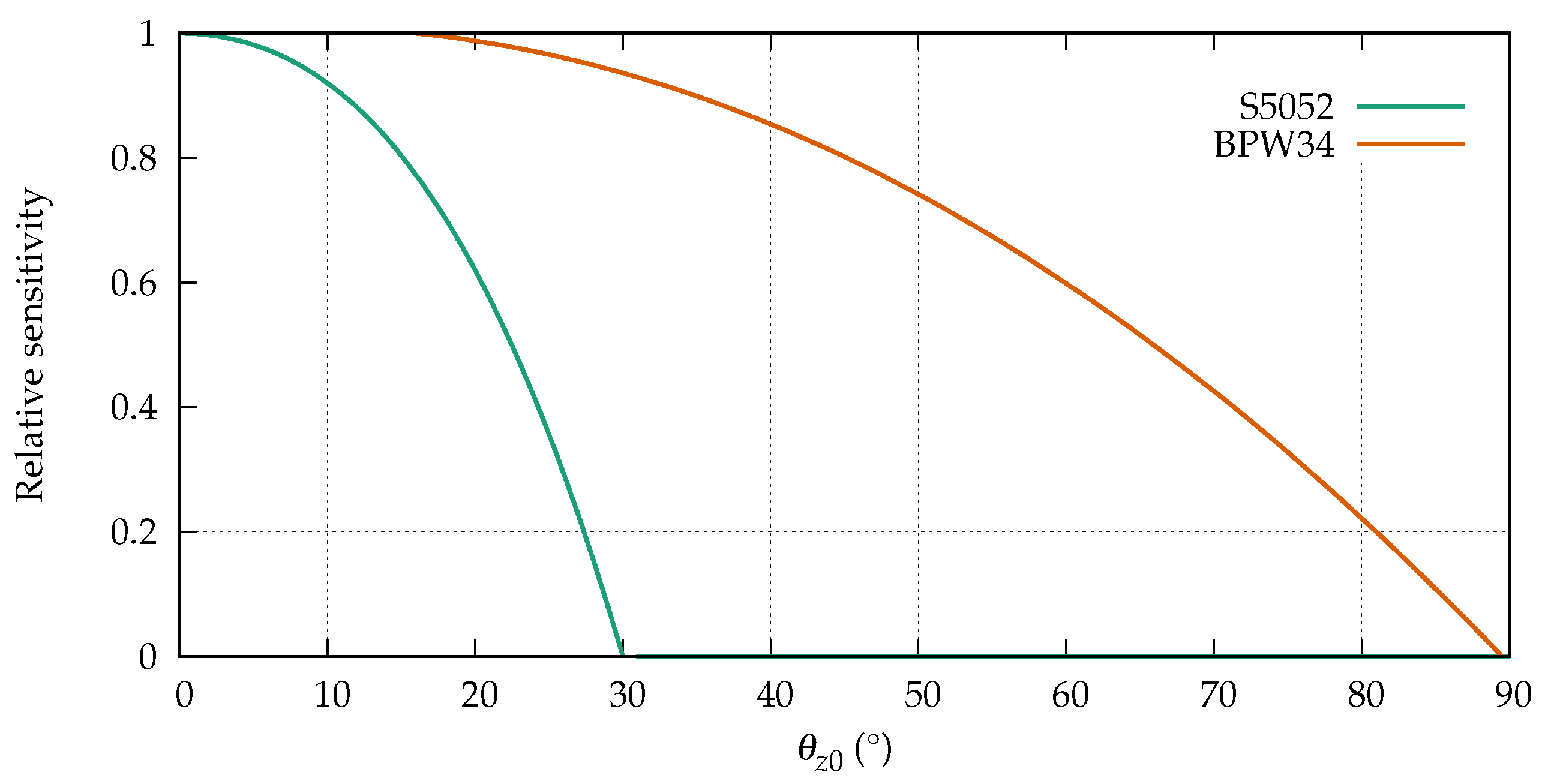
(Gaussian distribution) for the photodiode BPW34, which has a large acceptance angle. The simulation was performed with guided modes only (G), guided and tunneling modes (G + T) and finally with all possible modes including refracted modes (G + T + R). Inside the observed range, the relative error is positive in all scenarios but decreasing with the length. A positive relative error means that the measured length is longer than the real length. The light source
couples more power into higher order modes than
and the BPW34 detects modes up to relatively high angles (see
Figure 9). Since the transit time of each ray depends on
, the relative errors obtained for
are larger than the ones for
. If we compare the results of the three different mode categories, we can see that it does make a difference if we consider only guided modes (G) or tunneling modes additionally (G + T). The difference is more pronounced for the excitation with
as for
since the latter one is hardly exciting leaky rays. The further consideration of refracted modes (G + T + R) shows almost no influence on the relative error since they carry only little power, no matter which light source we choose. In fact, the influence of the refracted modes is not visible at all for the excitation with
. Overall, we can see that the model predicts only small errors in the phase measurements that vary slowly with the fiber length. The optical strain or length sensor would therefore measure a strain or length that is larger than the actual strain or length. Depending on the light source, the error ranges between 2.4% and 2.8% for
and 2.7% and 5.7% for
.
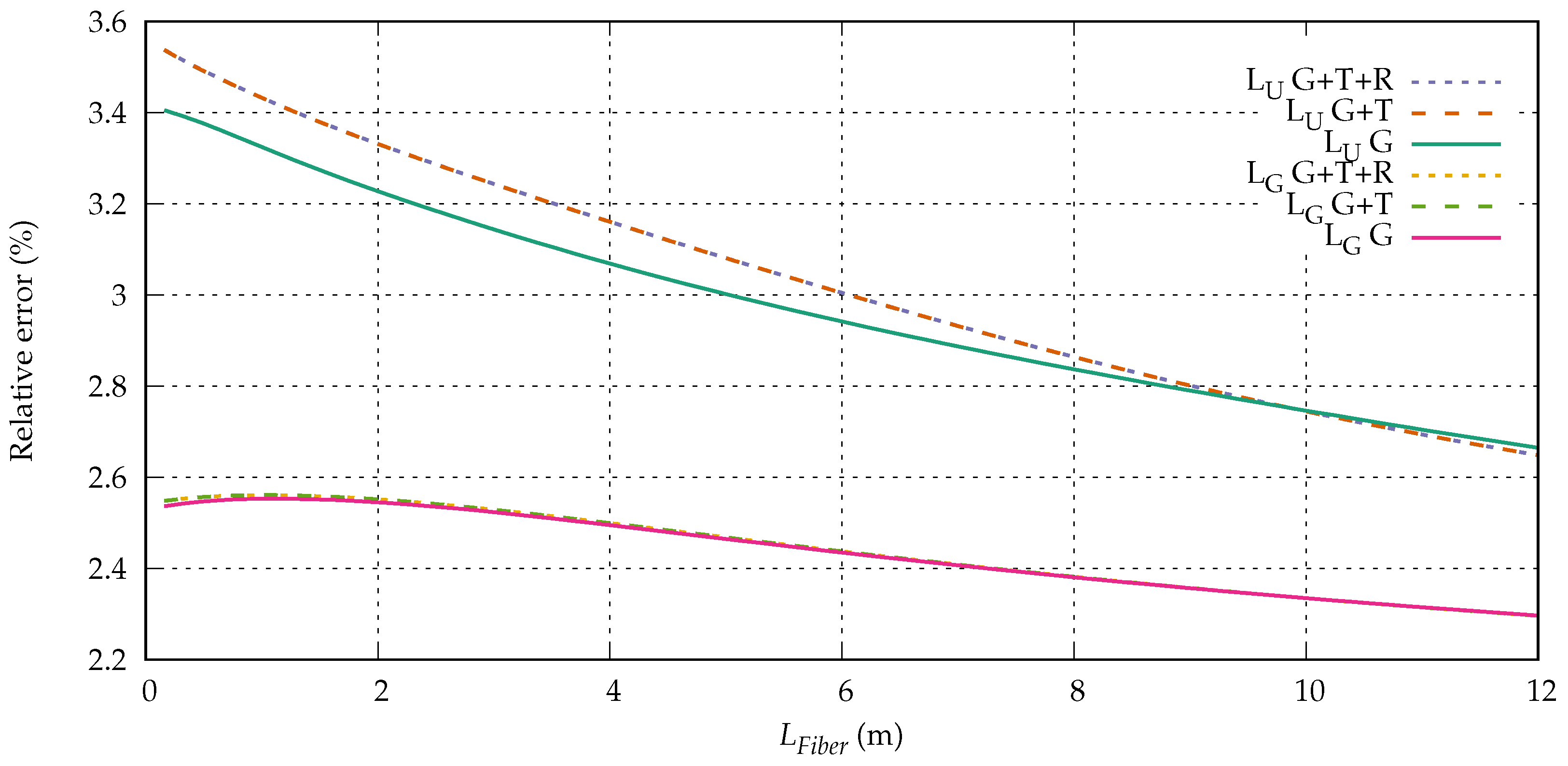
The simulations for the same conditions but for the photodiode S5052 are depicted in
Figure 14. In comparison to the previous scenario, all results show a smaller relative error, which is caused by the limited angular sensitivity of this photodiode (
Figure 9). The relation between the different mode categories is similar. Refracted modes play a negligible role, but this time the influence of the tunneling modes is very limited as well, since they are hardly detected by the receiver. This effect is especially pronounced for
where all three mode categories can barely be distinguished, but also for the excitation with
, the difference between guided and unguided modes became smaller. The error ranges between 2.3% and 2.55% for
and 2.65% and 3.55% for
.
It might be confusing to see that, for the excitation with , the relative error simulated for guided modes can actually get slightly larger than for the simulations that consider leaky modes as well. In the given scenario, this happens at . Since the simulation with all possible modes carries more power in higher order modes, it leads to a broader impulse response and is therefore often expected to result in a larger measurement error. However, we have to take into account that the signal is modulated with a frequency of . The phase cannot be obtained by simply considering the mean transit time of all excited modes, which would lead to a smaller relative error for the simulation of only guided modes. Instead, it is important to consider the modulation phase of each mode whose periodicity depends on its transit time and on the modulation frequency. In other words, the phase delay, which an input signal faces, does not only depend on the mean transit time of the impulse response but also on the shape of the impulse response and the modulation frequency of the input signal.
3.3.2. Influence of the Modulation Frequency
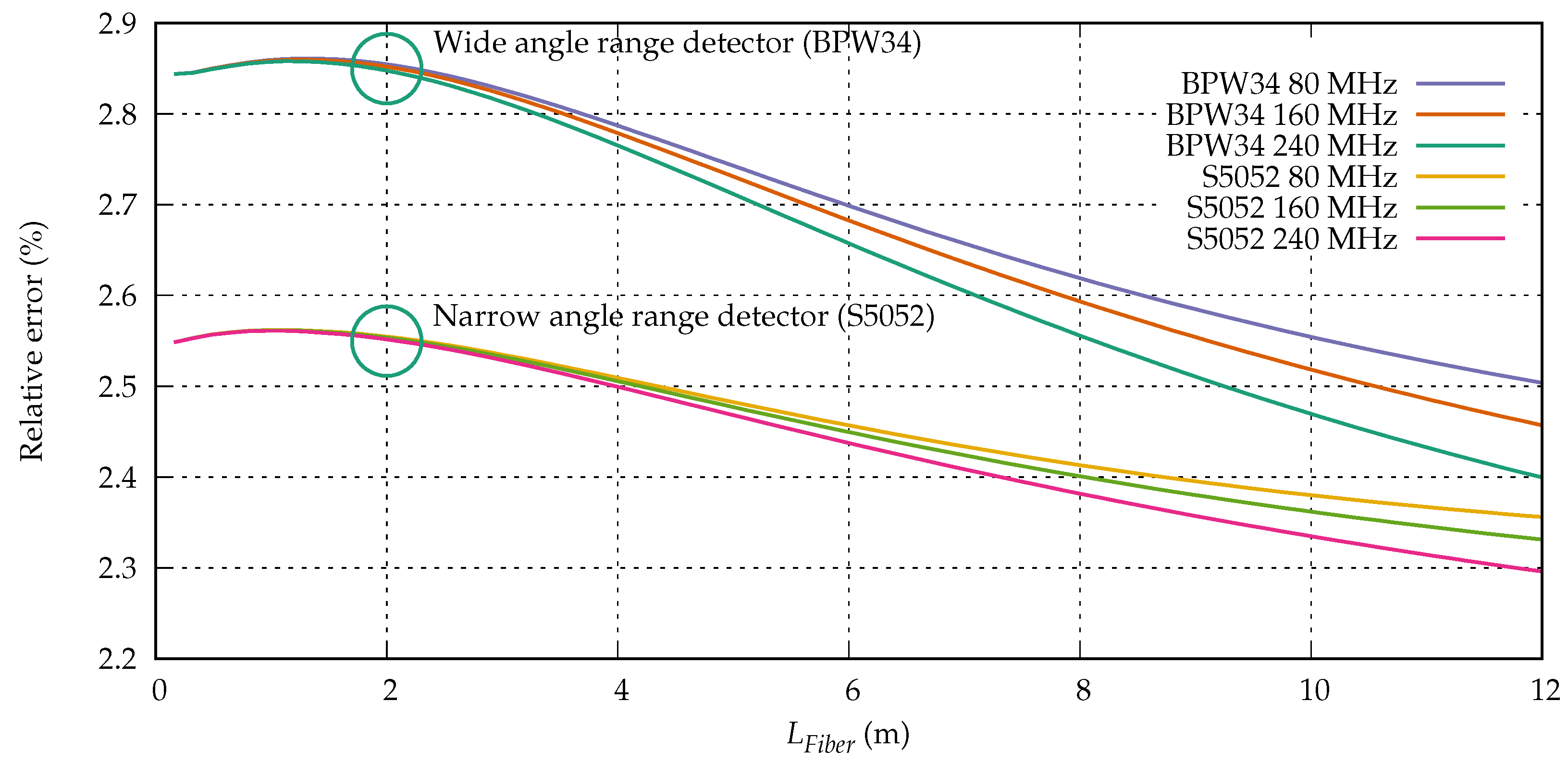
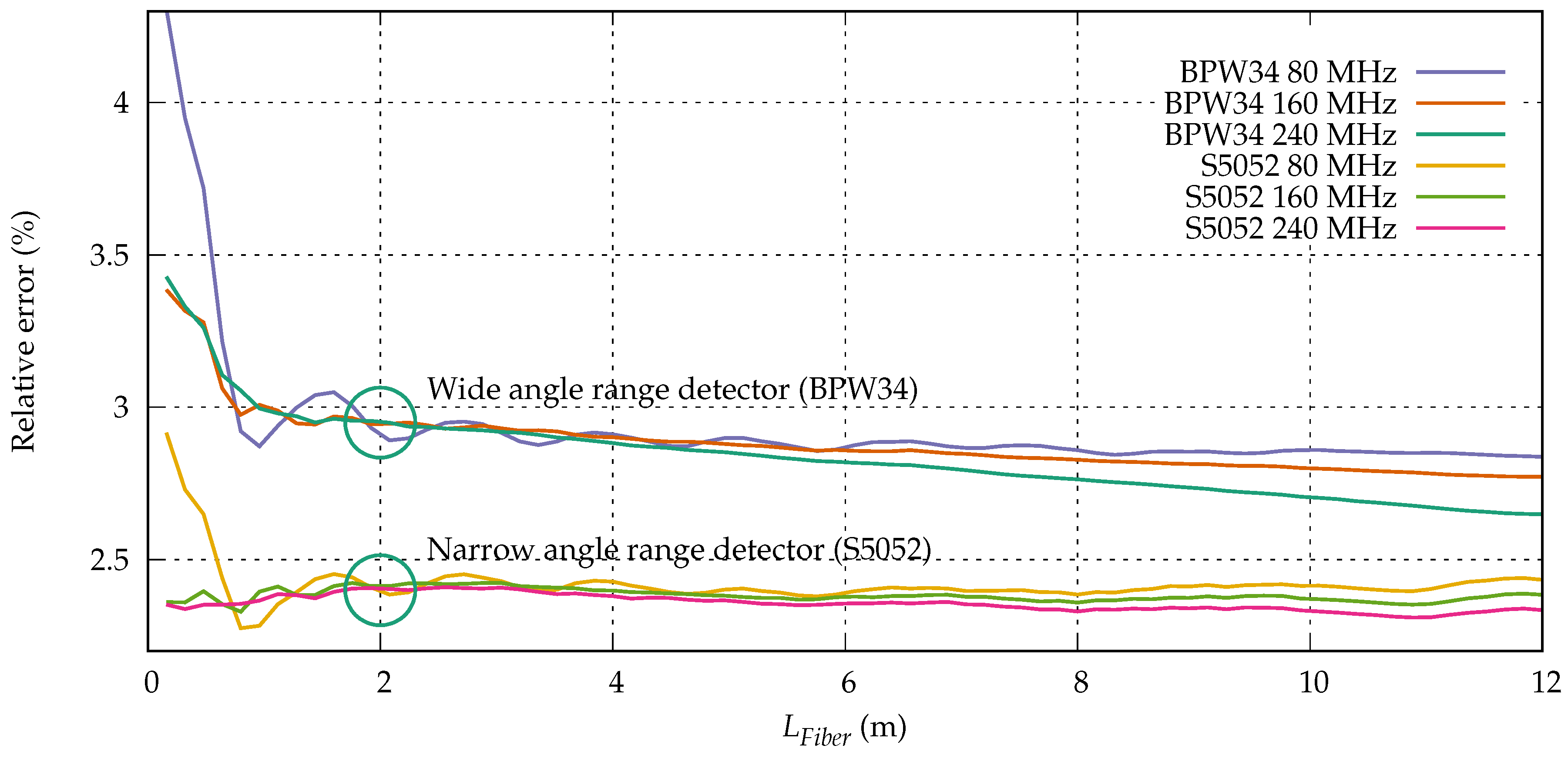
Furthermore, we evaluated the influence of the modulation frequency on the simulations.
Figure 15 shows the relative error for the excitation with
and both photodiodes BPW34 and S5052 for the modulation frequencies
,
and
. The modulation frequencies were chosen from a range that could be experimentally evaluated. The simulations considered all mode categories. The relative error for
was already shown in the previous diagrams. As we can see, for both photodiodes, the decrease of the relative error with the fiber length is less pronounced for lower modulation frequencies. For the BPW34, the relative error at the maximum fiber length of 12
increases from
at 240
to
at 80
. The effect is a little less pronounced for the S5052, where the relative error changes from
(240
) to
at 80
.
3.3.3. Influence of Reflections
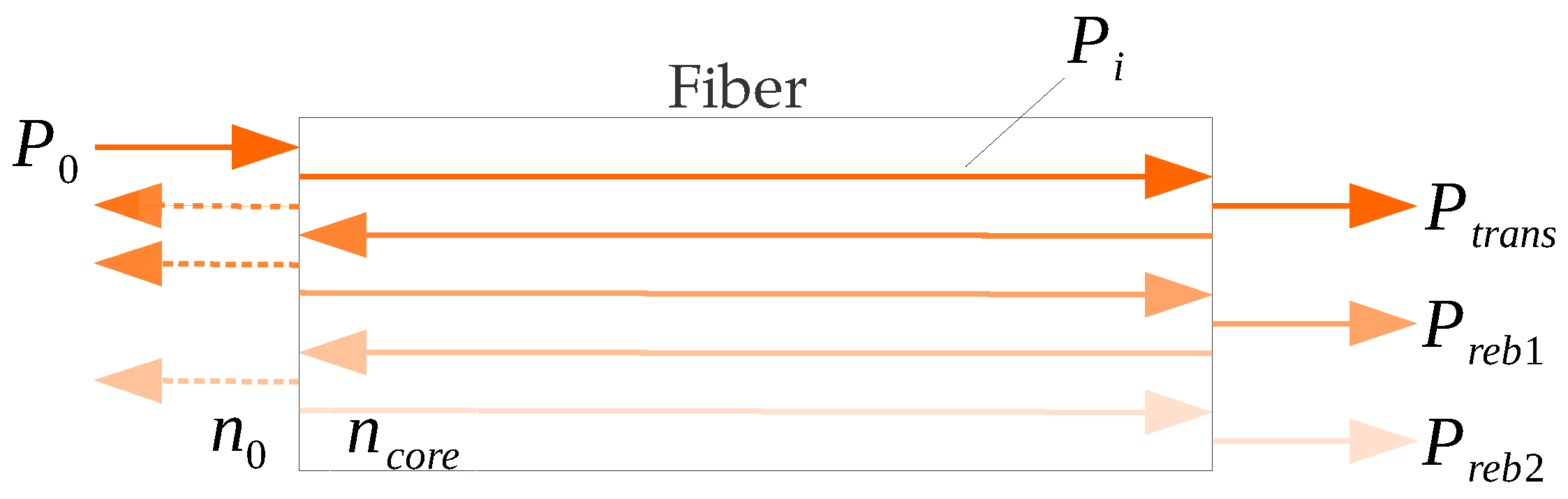
Figure 16 shows the same scenario but considers the first rebound as described in
Section 2.2.5. For the modulation frequency of 80
, it can clearly be seen that the reflections cause an oscillating behavior of the relative error. The absolute error oscillates with a constant amplitude over the length of the fiber. Since the relative error is related to the fiber length, its amplitude has a maximum at the beginning of the fiber and decreases with the length of the fiber. The rebound has to travel two times the fiber length before it interferes with the transmitted light; therefore, the spatial oscillation period is
with
being the modulation wavelength. For
this leads to
which can be seen in the depiction. The oscillation period for
is
and is harder to observe in the depiction due to the relatively large simulation step width of 16
. The oscillation at the modulation frequency of
can hardly be recognized at all since the oscillation period has decreased to ≈0.42 m. For the same reason, the maximum relative error for
and
is less pronounced than for
. Apart from the oscillations, we can see that the reflections do not influence the overall development of the relative error. For a better comparability of the different curves, we define three different errors:
Peak error is the maximum error that occurs at the first simulated position ( ),
Max. error is the maximum occuring error at the beginning of the fiber neglecting the peak,
Min. error is the error at the length of 12 .
The peak error has its maximum for . The real peak value at is independent from the modulation frequency. However, since the first simulated position is and the oscillation period is shorter for higher frequencies, the peak error decreases for higher modulation frequencies.
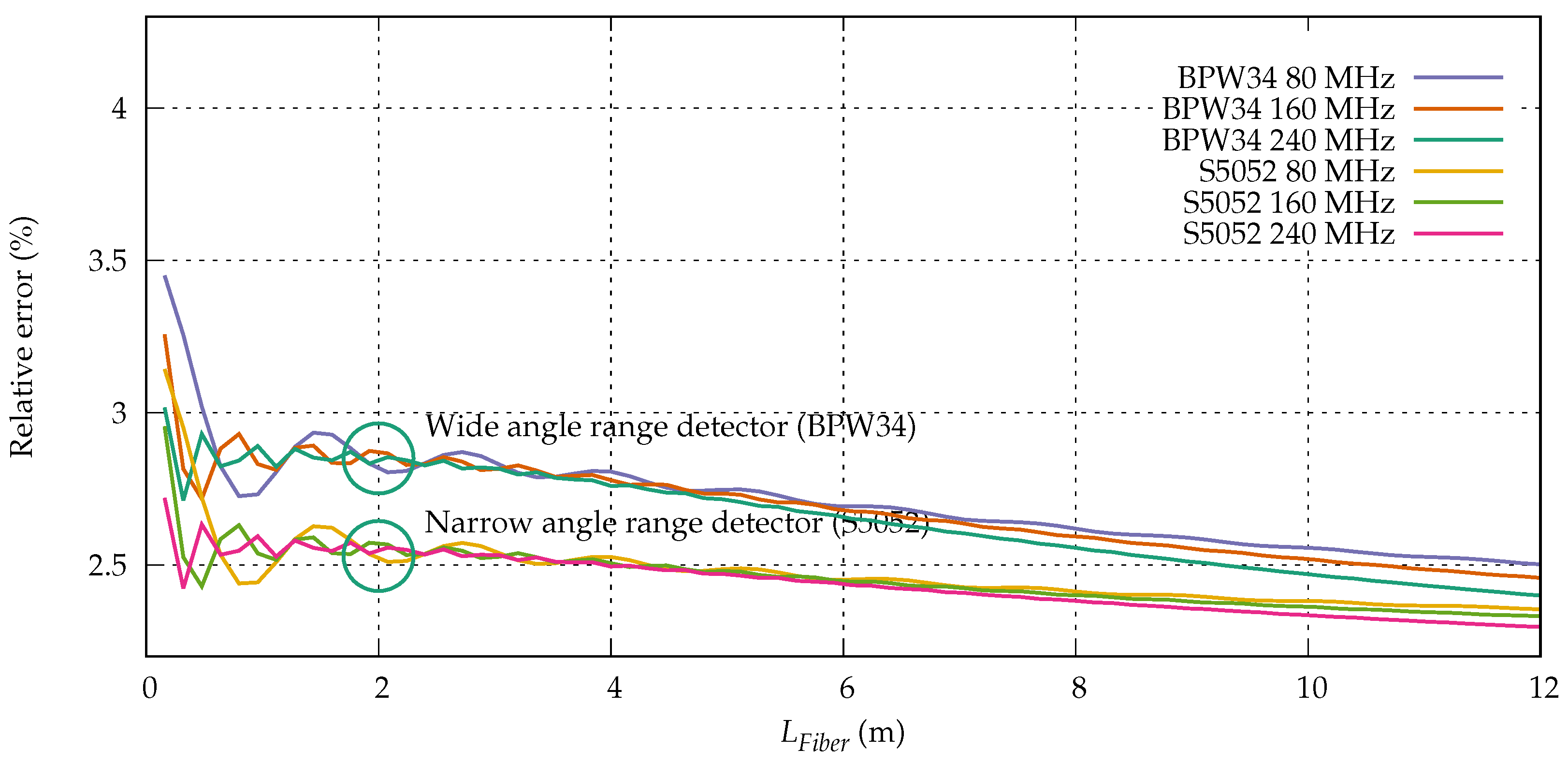
3.4. Results of the Experiment
The experimental results were obtained with the measurement setup described in
Section 2.3 and are shown in
Figure 17. For a better comparability the depiction shows the same error range as
Figure 16. Furthermore, the simulated and measured peak, maximum and minimum errors are compared in
Table 2. As it can be seen, the overall development of the relative error is predicted relatively well by the model. Since the data were slightly smoothed, the oscillations for 160
and 240
are less pronounced than for the simulations. The simulated maximum error for the BPW34 is only ≈0.1% smaller than the measured maximum error. For the S5052, the predicted maximum error is ≈0.15% larger.
The reflection induced peak errors differ a little more. For the BPW34, the simulated peak error at 80 is 0.85% too small. The simulated peak errors for the other modulation frequencies are too small as well (0.15% at 160 and 0.4% at 240 ). A possible explanation is that the simulation only considers reflections at the end surfaces of the fiber. It is likely that an additional reflection occurs at the surface of the receiver, which is even stronger due to the high refractive index of silicon. The simulated peak errors for the S5052 are larger than the measured errors (0.25% at 80 , 0.6% at 160 and 0.35% at 240 ). This supports the just stated theory if we consider the fact that this photodiode has a convex lens attached to it which can reduce the amount of power that is reflected back into the fiber. Since the simulated peak errors are larger than the measured peak errors, one could conclude that the reflection at the unpolished fiber’s end surface might not be relevant at all.
The development of the relative error over the length of the fiber shows the expected dependency on the modulation frequency. The higher the frequency, the steeper the decrease of the error. In general, the decrease predicted by the model is more pronounced than for the measurements. Compared to the measurements, the minimum error predicted by the model is ≈0.35% smaller for the BPW34 and ≈0.05% smaller for the S5052. This behavior could be caused by the used scatter data, which were obtained from a 16
piece of the Asahi TC-1000. Obtaining the scatter data of such a short fiber is a complicated task since the accuracy of the results depends on a variety of different influences as described in [
13]. As the decrease of the relative error happens faster in the simulation than it does in the measurement, it could be concluded that the scattering of the used data is slightly too strong.
Like in the simulation, the oscillations can best be observed at the lowest modulation frequency of 80 and their periods as well as the positions of the minima and maxima being in good agreement with the theoretical results. The curves for the S5052 are less smooth than for the BPW34, which can be explained by the smaller angular detection range. Due to the missing polishing of the end surface after each cut, the angular power distribution is partially randomized before hitting the receiver. Due to the different optical path lengths of the modes, the resulting phase depends on the sum of all detected modes. Since the receiver detects a random set of modes at each cut, the detected phase dithers within a certain range. The larger the angular detection range of the receiver, the smaller the variance of the set of detected modes. Another effect is also related to the small angular range of the S5052. Between the fiber length of 8 and 12 , the relative error varies slowly. In fact, the relative error for the S5052 increases for all frequencies between and 12 , which cannot be explained by the mode mixing at the end surface of the fiber. However, during the cutback measurement, the geometry of the fiber is altered whenever another loop is unwinded. This could have a small impact on the angular power distribution inside the fiber and therefore cause a slowly developing drift of the phase. Again, the BPW34 is not affected due to the large angular detection range.
4. Conclusions
We have presented a new propagation model for SI-MMF that enables the prediction of the transmission behavior and therefore allows the evaluation of the fiber’s behavior for both analog sensing and digital data transmission applications via the phase and amplitude response obtained from the computed impulse response. It considers the launching condition and the angular sensitivity of the receiver as well as the angle- and skewness dependent attenuation and scattering inside the fiber. The model allows the selective consideration of the different mode categories (guided, tunneling and refracted modes) to study their impact. An implementation of the model that takes full advantage of modern computer hardware is publicly available.
Simulations performed with the model lead to the conclusion that, while the influence of refracted modes on the phase response is negligible, the impact of tunneling modes depends strongly on the launching condition and on the angular sensitivity of the applied receiver. For realistic light sources, however, their impact is very limited as well.
Furthermore, we have demonstrated the application of the model by investigating the relative error that occurs in optical length or strain sensors that are based on the phase measurement of a harmonically modulated optical signal. For a fiber up to a length of 12 , the resulting length measurement error lies in the range of 2% to 3%, if the discussed influences like modal dispersion or the refractive group index are not properly considered, and changes only slowly with the length of the fiber as long as reflections are neglected. They can, however, be covered by the model as well by adding a second impulse response that is caused by the reflections. The determination of the proper reflectivities is, however, a demanding task since the reflectivity of the photodiode has to be taken into account as well.
A cutback measurement has been performed with different receivers and modulation frequencies to verify the model. The results are generally in good agreement with the simulations and the deviations can be explained. If we neglect reflections, the maximum deviation of the relative error of the measurement from the model occurs for the minimum error of the BPW34 at , where the measured error is ≈0.35% larger than predicted. While receivers with a broader angular acceptance range show a larger overall error, they are less prone to fluctuations of the modal power distribution caused by unprepared end surfaces or the geometry of the fiber.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}