
An IoT-Platform-Based Deep Learning System for Human Behavior Recognition in Smart City Monitoring Using the Berkeley MHAD Datasets

 ,
,  ,
,  and
and 
Abstract
:1. Introduction
- ▪
- We developed a new framework for modeling human behavior-based deep learning models to understand and analyze human behavior better. The proposed algorithms explore convolution deep neural networks, which learn different features of historical data to determine collective abnormal human behaviors;
- ▪
- We tested and evaluated the experiments of human behavior recognition systems based on convolution deep neural networks to demonstrate the usefulness of the proposed method.
- ▪
- Safety and security services, i.e., suicide deterrence in municipal places, amenability monitoring, and the scrutiny of disaster mitigation due to the detection of vandalism in a crowd, the protection of critical infrastructures, the detection of violent and dangerous situations, perimeter monitoring and person detection, and weapon detection and reporting;
- ▪
- Epidemic control policy services, i.e., social distancing in municipal spaces, automatic mask recognition, sanitary compliance detection, and monitoring healthcare;
- ▪
- Infrastructure and Traffic monitoring, i.e., monitoring traffic in smart cities, the recognition of traffic rule violations, the surveillance of roadsides, and parking space management.
2. Background and Related Work
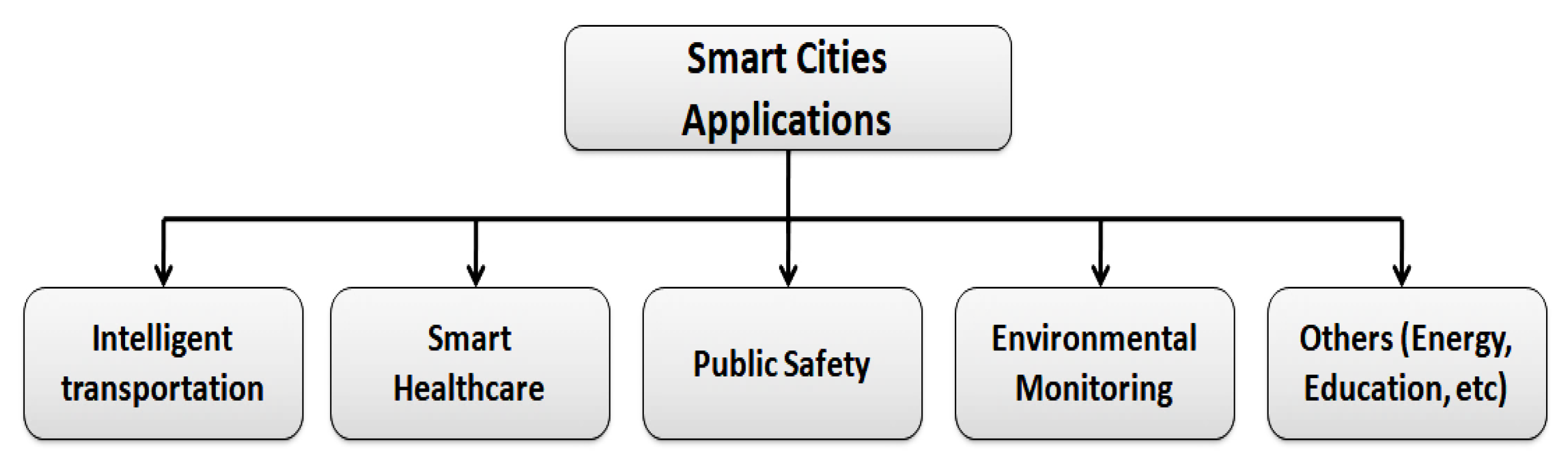
2.1. Smart Sustainable Cities
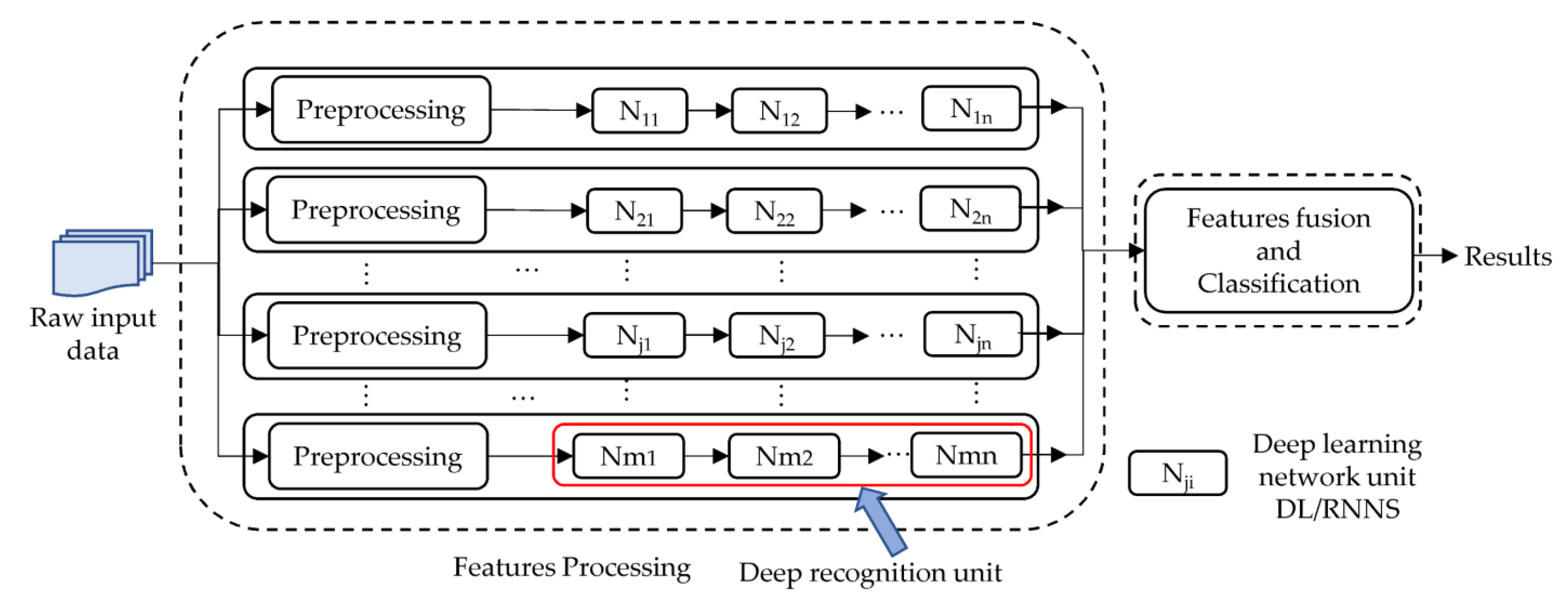
2.2. IoT-Platform-Based Deep Learning Systems
2.3. Related Work
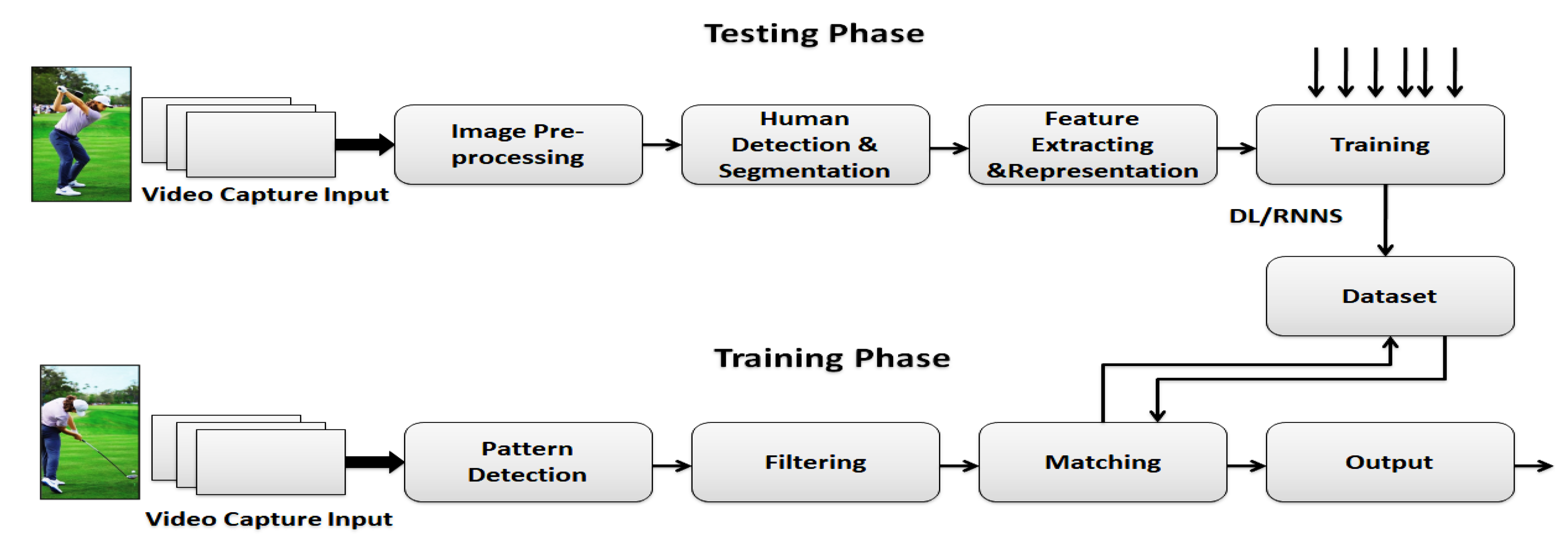
3. Human Behavior Recognition Methodology
| Algorithm 1. Human Behavior Recognition (HBR) Algorithm |
| Initiate training process Initiate Testing process
|
4. Experimental Results and Discussion
5. Result Validation
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Saeed, R.A.; Mabrouk, A.A.M.H.; Mukherjee, A.; Falcone, F.; Wong, K.D. WiMAX, LTE, and WiFi Interworking. J. Comput. Syst. Netw. Commun. 2010, 2010, 754187. [Google Scholar] [CrossRef]
- Bokhari, S.A.A.; Myeong, S. Use of Artificial Intelligence in Smart Cities for Smart Decision-Making: A Social Innovation Perspective. Sustainability 2022, 14, 620. [Google Scholar] [CrossRef]
- Ghazal, T. A review on security threats, vulnerabilities, and countermeasures of 5G enabled Internet-of-Medical-Things. IET Commun. 2022, 16, 421–432. [Google Scholar]
- Pradeep, P.; Kant, K. Conflict Detection and Resolution in IoT Systems: A Survey. IoT 2022, 3, 12. [Google Scholar] [CrossRef]
- Ali, E.S.; Hassan, M.B.; Saeed, R.A. Machine Learning Technologies in the Internet of Vehicles. In Intelligent Technologies for Internet of Vehicles; Magaia, N., Mastorakis, G., Mavromoustakis, C., Pallis, E., Markakis, E.K., Eds.; Springer: Cham, Switzerland, 2021; pp. 225–252. [Google Scholar]
- Poulter, A.J.; Cox, S.J. Enabling Secure Guest Access for Command-and-Control of Internet of Things Devices. IoT 2021, 2, 13. [Google Scholar] [CrossRef]
- Hassan, M.B.; Ali, E.S.; Mokhtar, R.A.; Chaudhari, B.S. 6—NB-IoT: Concepts, applications, and deployment challenges. In LPWAN Technologies for IoT and M2M Applications; Chaudhari, B.S., Zennaro, M., Eds.; Academic Press: Cambridge, MA, USA, 2020; pp. 119–144. [Google Scholar]
- Ali, E.S.; Hasan, M.K.; Hassan, R.; Hassan, M.B.; Islam, S.; Nafi, N.S.; Bevinakoppa, S. Machine Learning Technologies for Secure Vehicular Communication in Internet of Vehicles: Recent Advances and Applications. Secur. Commun. Netw. 2021, 2021, 8868355. [Google Scholar] [CrossRef]
- Ghorpade, S.N.; Zennaro, M.; Chaudhari, B.S.; Saeed, R.A.; Alhumyani, H.; Abdel-Khalek, S. A novel enhanced quantum PSO for optimal network configuration in heterogeneous industrial IoT. IEEE Access 2021, 9, 134022–134036. [Google Scholar] [CrossRef]
- Pappalardo, M.; Virdis, A.; Mingozzi, E. An Edge-Based LWM2M Proxy for Device Management to Efficiently Support QoS-Aware IoT Services. IoT 2022, 3, 11. [Google Scholar] [CrossRef]
- Vashisht, M.; Kumar, B. Effective Implementation of Machine Learning Algorithms Using 3D Colour Texture Feature for Traffic Sign Detection for Smart Cities. Expert Syst. 2021, 39, e12781. [Google Scholar] [CrossRef]
- Zeinab, K.A.M.; Elmustafa, S.A.A. Internet of things applications, challenges, and related future technologies. World Sci. News 2017, 67, 126–148. [Google Scholar]
- Alqurashi, F.A.; Alsolami, F.; Abdel-Khalek, S.; Saeed, R.A. Machine learning techniques in the internet of UAVs for smart cities applications. J. Intell. Fuzzy Syst. 2022, 42, 3203–3226. [Google Scholar] [CrossRef]
- Tuyishimire, E.; Bagula, A.; Rekhis, S.; Boudriga, N. Trajectory planning for cooperating unmanned aerial vehicles in the IoT. IoT 2022, 3, 10. [Google Scholar] [CrossRef]
- Abdalla, R.S.; Mahbub, S.A.; Mokhtar, R.A.; Ali, E.S.; Saeed, R.A. IoE Design Principles and Architecture. In Internet of Energy for Smart Cities; CRC Press: Boca Raton, FL, USA, 2021; pp. 145–170. [Google Scholar]
- Ofli, F.; Chaudhry, R.; Kurillo, G.; Vidal, R.; Bajcsy, R. Berkeley MHAD: A comprehensive Multimodal Human Action Database. In Proceedings of the 2013 IEEE Workshop on Applications of Computer Vision (WACV), Clearwater Beach, FL, USA, 15–17 January 2013; pp. 53–60. [Google Scholar] [CrossRef]
- Chen, C.; Jafari, R.; Kehtarnavaz, N. UTD-MHAD: A Multimodal Dataset for Human Action Recognition Utilizing A Depth Camera And A Wearable Inertial Sensor. In Proceedings of the 2015 IEEE International Conference on Image Processing, Quebec City, QC, Canada, 27–30 September 2015; pp. 168–172. [Google Scholar]
- Hassan, M.B.; Ali, E.S.; Nurelmadina, N.; Saeed, R.A. Artificial intelligence in IoT and its applications. In Intelligent Wireless Communications; IET: Stevenage, UK, 2020. [Google Scholar]
- Zhang, Y.-D.; Dong, Z.; Gorriz, J.M.; Cattani, C.; Yang, M. Introduction to the Special Issue on Recent Advances on Deep Learning for Medical Signal Analysis. CMES-Comput. Model. Eng. Sci. 2021, 128, 399–401. [Google Scholar] [CrossRef]
- Guan, S.; Zhang, Y.; Tian, Z. Research on Human Behavior Recognition based on Deep Neural Network. Adv. Comput. Sci. Res. 2019, 87, 777–781. [Google Scholar]
- Rashmi, M.; Ram, M.R. Guddeti, Skeleton Based Human Action Recognition for Smart City Application Using Deep Learning. In Proceedings of the 12th International Conference on Communication Systems & Networks (COMSNETS), Bangalore, India, 7–11 January 2020. [Google Scholar]
- Thakur, N.; Han, C.Y. An Ambient Intelligence-Based Human Behavior Monitoring Framework for Ubiquitous Environments. Information 2021, 12, 81. [Google Scholar] [CrossRef]
- Liu, X. Sports Deep Learning Method Based on Cognitive Human Behavior Recognition. Hindawi Comput. Intell. Neurosci. 2022, 2022, 2913507. [Google Scholar] [CrossRef] [PubMed]
- Ingle, P.Y.; Kim, Y.-G. Real-Time Abnormal Object Detection for Video Surveillance in Smart Cities. Sensors 2022, 22, 3862. [Google Scholar] [CrossRef] [PubMed]
- Anagnostopoulos, C.-N.E.; Anagnostopoulos, I.E.; Psoroulas, I.D.; Loumos, V.; Kayafas, E. License Plate Recognition From Still Images And Video Sequences: A Survey. IEEE Trans. Intell. Transp. Syst. 2008, 9, 377–391. [Google Scholar] [CrossRef] [Green Version]
- Nurelmadina, N.; Hasan, M.K.; Memon, I.; Saeed, R.A.; Zainol Ariffin, K.A.; Ali, E.S.; Mokhtar, R.A.; Islam, S.; Hossain, E.; Hassan, M.A.; et al. Systematic Review on Cognitive Radio in Low Power Wide Area Network for Industrial IoT Applications. Sustainability 2021, 13, 338. [Google Scholar] [CrossRef]
- Dai, C.; Liu, X.; Lai, J.; Li, P.; Chao, H.-C. Human Behavior Deep Recognition Architecture for Smart City Applications in the 5G Environment. IEEE Netw. 2019, 33, 206–211. [Google Scholar] [CrossRef]
- Hurbean, L.; Danaiata, D.; Militaru, F.; Dodea, A.-M.; Negovan, A.-M. Open Data Based Machine Learning Applications in Smart Cities: A Systematic Literature Review. Electronics 2021, 10, 2997. [Google Scholar] [CrossRef]
- Guerrero-Ibáñez, J.; Zeadally, S.; Contreras-Castillo, J. Sensor technologies for intelligent transportation systems. Sensors 2018, 18, 1212. [Google Scholar] [CrossRef] [PubMed]
- De Las Heras, A.; Luque-Sendra, A.; Zamora-Polo, F. Machine learning technologies for sustainability in smart cities in the post-covid era. Sustainability 2020, 12, 9320. [Google Scholar] [CrossRef]
- Mukhtar, A.M.; Saeed, R.A.; Ali, E.S.; Alhumyani, H. Performance Evaluation of Downlink Coordinated Multipoint Joint Transmission under Heavy IoT Traffic Load. Wirel. Commun. Mob. Comput. 2022, 2022, 6837780. [Google Scholar] [CrossRef]
- Alatabani, L.E.; Ali, E.S.; Saeed, R.A. Deep learning approaches for IoV applications and services. In Intelligent Technologies for Internet of Vehicles; Springer: Berlin/Heidelberg, Germany, 2021; pp. 253–291. [Google Scholar]
- Hassan, M.B.; Ahmed, E.S.A.; Saeed, R.A. Machine Learning for Industrial IoT Systems. In Handbook of Research on Innovations and Applications of AI, IoT, and Cognitive Technologies; IGI Global: Hershey, PA, USA, 2021; pp. 336–358. [Google Scholar]
- Elfatih, N.M.; Hasan, M.K.; Kamal, Z.; Gupta, D.; Saeed, R.A.; Ali, E.S.; Hosain, M.S. Internet of vehicle’s resource management in 5G networks using AI technologies: Current status and trends. IET Commun. 2022, 16, 400–420. [Google Scholar] [CrossRef]
- Ghorpade, S.N.; Zennaro, M.; Chaudhari, B.S.; Saeed, R.A.; Alhumyani, H.; Abdel-Khalek, S. Enhanced differential crossover and quantum particle swarm optimization for IoT applications. IEEE Access 2021, 9, 93831–93846. [Google Scholar] [CrossRef]
- Ahmed, E.S.A.; Mohammed, Z.T.; Hassan, M.B.; Saeed, R.A. Algorithms Optimization for Intelligent IoV Applications. In Handbook of Research on Innovations and Applications of AI, IoT, and Cognitive Technologies; IGI Global: Hershey, PA, USA, 2021; pp. 1–25. [Google Scholar]
- Wei, H.; Chopada, P.; Kehtarnavaz, N. C-MHAD: Continuous Multimodal Human Action Dataset of Simultaneous Video and Inertial Sensing. Sensors 2020, 20, 2905. [Google Scholar] [CrossRef]
- Alnazir, A.; Mokhtar, R.A.; Alhumyani, H.; Saeed, R.A.; Abdel-khalek, S. Quality of Services Based on Intelligent IoT WLAN MAC Protocol Dynamic Real-Time Applications in Smart Cities. Comput. Intell. Neurosci. 2021, 2021, 2287531. [Google Scholar] [CrossRef]
- Ahmed, Z.E.; Hasan, M.K.; Saeed, R.A.; Hassan, R.; Islam, S.; Mokhtar, R.A.; Khan, S.; Akhtaruzzaman, M. Optimizing Energy Consumption for Cloud Internet of Things. Front. Phys. 2020, 8, 358. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Citations | Methodology | Datasets | Max Accuracy | Shortcomings Compared with Proposed Study |
|---|---|---|---|---|
| Shanshan et al., 2019 [20] | Human-behavior-recognition-based DL for the posture of the human body | UCI HAR dataset | 93% | Large testing error and low accuracy |
| Rashmi et al., 2020 [21] | Human-action-recognition-based CNN to extract features from skeleton joint information | MSRAction3D dataset | 97% | Not recognizing different human motions. It uses distance features which need more computations |
| Nirmalya et al., 2021 [22] | Human behavior detection during activities of daily living using the EDSCCA algorithm | ADLs dataset | 83.87% | Not recognizing different motions and low accuracy |
| Xiwei Liu, 2022 [23] | Development of 3D residual structures for recognizing human behavior using the DL approach | HMDB51 and UCF101 datasets | 80% | The difficulty of training and low accuracy |
| Palash et al., 2022 [24] | Detection carried objects by humans based on CNN | ImageNet, Open Image dataset, and Olmos dataset | 97.5% | Detects only objects carried by humans, and now motion detection |
| Name | Size | Function |
|---|---|---|
| training_data_count | test_data_count | 4519 training series (with 50% overlap between each series) |
| test_data_count | len(X_test) | 1197 test series |
| n_input | len(X_train [0][0]) | Number of input parameters per timestep |
| Hidden layer | 34 | Hidden layer number of features |
| No. of classes | 6 | Number of classes |
| Decaying learning rate | True | Calculated as: decayedlearningrate = learningrate * decayrate ^ (globalstep / decaysteps) |
| Learning rate | 0.0025 | Used if decaying learning ate set to false |
| Initial learning rate | 0.005 | A starting point for learning rate. |
| Decay rate | 0.96 | The base of the exponential in the decay |
| Decay steps | 128,256,512 | Every 60,000 steps with a base of 0.96 |
| Global step | tf.Variable(0, trainable = False) | The parameter in the learning rate pushes it to take another step in the learning process. |
| Training iterations | training_data_count 100,200,600,1000 | Loop 100,200,600,1000 times on the dataset, i.e., 100,200,600,1000 epochs |
| Batch size | 128 | Number of training samples present in a one batch |
| display_iter | batch_size X 8 | To show test set accuracy during training |
| Batch Size | Number of Epochs | Overall Test Accuracy |
|---|---|---|
| 512 | 300 | 93.45% |
| 512 | 300 | 89.688% |
| 128 | 200 | 98.72% |
| 128 | 200 | 98.48% |
| 128 | 300 | 98.38% |
| 128 | 1000 | 97.90% |
| 128 | 150 | 97.00% |
| 256 | 800 | 98.69% |
| 512 | 100 | 93.16% |
| 512 | 600 | 97.61% |
| 512 | 100 | 97.92 |
| 512 | 150 | 96.43% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khalifa, O.O.; Roubleh, A.; Esgiar, A.; Abdelhaq, M.; Alsaqour, R.; Abdalla, A.; Ali, E.S.; Saeed, R. An IoT-Platform-Based Deep Learning System for Human Behavior Recognition in Smart City Monitoring Using the Berkeley MHAD Datasets. Systems 2022, 10, 177. https://doi.org/10.3390/systems10050177
Khalifa OO, Roubleh A, Esgiar A, Abdelhaq M, Alsaqour R, Abdalla A, Ali ES, Saeed R. An IoT-Platform-Based Deep Learning System for Human Behavior Recognition in Smart City Monitoring Using the Berkeley MHAD Datasets. Systems. 2022; 10(5):177. https://doi.org/10.3390/systems10050177
Chicago/Turabian StyleKhalifa, Othman O., Adil Roubleh, Abdelrahim Esgiar, Maha Abdelhaq, Raed Alsaqour, Aisha Abdalla, Elmustafa Sayed Ali, and Rashid Saeed. 2022. "An IoT-Platform-Based Deep Learning System for Human Behavior Recognition in Smart City Monitoring Using the Berkeley MHAD Datasets" Systems 10, no. 5: 177. https://doi.org/10.3390/systems10050177
APA StyleKhalifa, O. O., Roubleh, A., Esgiar, A., Abdelhaq, M., Alsaqour, R., Abdalla, A., Ali, E. S., & Saeed, R. (2022). An IoT-Platform-Based Deep Learning System for Human Behavior Recognition in Smart City Monitoring Using the Berkeley MHAD Datasets. Systems, 10(5), 177. https://doi.org/10.3390/systems10050177