
Development of a Unity–VISSIM Co-Simulation Platform to Study Interactive Driving Behavior



Abstract
:1. Introduction
2. Literature Review
2.1. Microscopic Traffic Simulators
2.2. Driving Simulators
2.2.1. Physics-Based Driving Simulators
2.2.2. VR-Based Driving Simulators
2.3. Co-Simulation Platforms
3. Methodology
- Microscopic traffic simulation: considering that different factors have different effects in different traffic scenarios, typical traffic scenarios, such as pedestrian and non-motorized vehicle crossing and pedestrian–vehicle interactions at intersections, are constructed in VISSIM, and the richness of the various elements in the scenario is as close to reality as possible.
- VR scenes: after constructing a traffic scenario in VISSIM, the microscopic simulation data in VISSIM are transmitted to Unity3D through the COM interface. Firstly, the static data of the road network in the simulation scene, such as the number of roads and the length of each road, are obtained with Unity3D’s scripts, and the 3D model in VISSIM is optimized. Then, the simulation running data are imported into Unity3D and the traffic scenario in VISSIM is restored 1:1 in Unity3D.
- Multiplayer online modules: the user unit vehicle is used as a prefab in Unity3D’s communication function. After a user connects to the network and enters the simulation system, the corresponding unit can be generated in the scene according to the user’s own needs. During multiplayer online, users can achieve basic interactions such as field of view and physical collisions with each other. These users can also interact with various elements in the environment or non-user units in real-time.
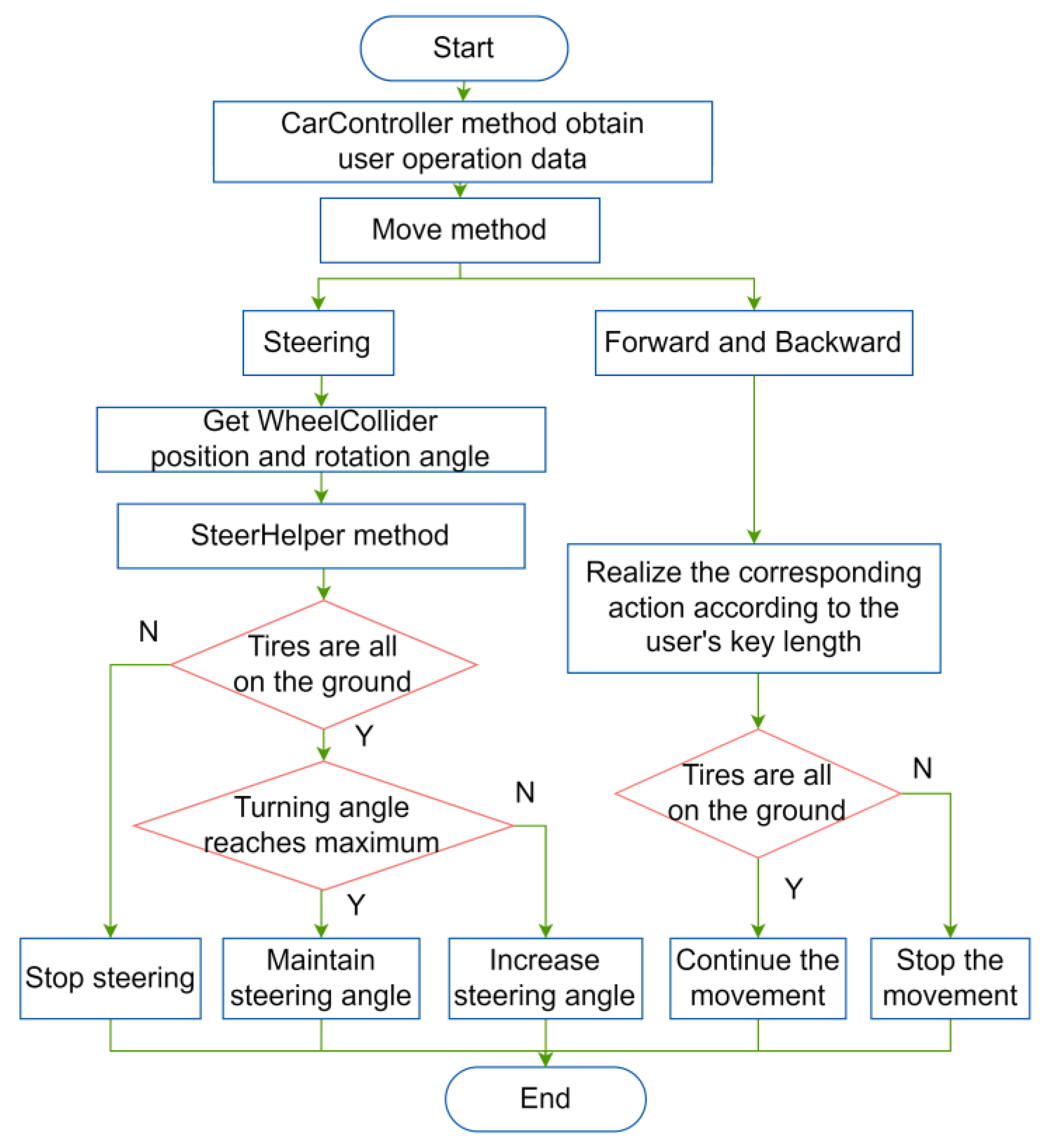
- User vehicles: users are responsible for controlling the behavior of the vehicles in the simulation scene. These vehicles can perform basic functions such as starting, braking, turning, and accelerating/decelerating. The relevant parameters of each function are calibrated using real driving data to recreate a user’s driving experience.
- Non-user vehicles: to achieve the real-time responses of the non-user vehicles to the user vehicles, the behavior of the user-controlled vehicles in Unity3D is transmitted to the simulation running scene in VISSIM, where default models such as the Wiedemann74 classic following model are used for calculation. The response results in VISSIM are transmitted back to Unity3D in data form, presenting the changes in the scene caused by the user’s behavior in the system and on the user’s screen, thus achieving a real-time interaction function.
3.1. VRMMO Environment
3.1.1. Static Components
- Vehicle model
- Road network
- Environmental object model
3.1.2. Dynamics Components
- Initial simulation parameter
- Signal control data
- Non-user vehicle trajectory data
3.1.3. MMO Components
3.2. System Working Flow
3.3. Functional Designs
3.3.1. User Vehicle Building
- Vehicle dynamic performance
- Driving Vision
3.3.2. Real Driving Data Calibration
3.3.3. Multiplayer Online Network Communication Function
- Mirror multiplayer online system
- Online user creation
3.3.4. Other Functions
- UI design
- Scene selection
4. Discussion
- Intelligent Transportation Systems (ITS)
- Human Factors
- Driving Education
- Traffic Safety Analysis
- Model Complexity and Realism
- Calibration and Validation
- Data Collection and Processing
- Usability and User Experience
- Generalizability of Findings
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhao, X.; Wu, Y.; Rong, J.; Zhang, Y. Development of a Driving Simulator Based Eco-Driving Support System. Transp. Res. Part C Emerg. Technol. 2015, 58, 631–641. [Google Scholar] [CrossRef]
- Ahmed, M.M.; Khan, M.N.; Das, A.; Dadvar, S.E. Global Lessons Learned from Naturalistic Driving Studies to Advance Traffic Safety and Operation Research: A Systematic Review. Accid. Anal. Prev. 2022, 167, 106568. [Google Scholar] [CrossRef] [PubMed]
- Saifuzzaman, M.; Zheng, Z. Incorporating Human-Factors in Car-Following Models: A Review of Recent Developments and Research Needs. Transp. Res. Part C Emerg. Technol. 2014, 48, 379–403. [Google Scholar] [CrossRef]
- Chen, D.; Ahn, S.; Laval, J.; Zheng, Z. On the Periodicity of Traffic Oscillations and Capacity Drop: The Role of Driver Characteristics. Transp. Res. Part B Methodol. 2014, 59, 117–136. [Google Scholar] [CrossRef]
- Wynne, R.A.; Beanland, V.; Salmon, P.M. Systematic Review of Driving Simulator Validation Studies. Saf. Sci. 2019, 117, 138–151. [Google Scholar] [CrossRef]
- Sportillo, D.; Paljic, A.; Ojeda, L. Get Ready for Automated Driving Using Virtual Reality. Accid. Anal. Prev. 2018, 118, 102–113. [Google Scholar] [CrossRef]
- Barcelo, J. Fundamentals of Traffic Simulation; Barceló, J., Ed.; International Series in Operations Research & Management Science; Springer: New York, NY, USA, 2010; Volume 145, ISBN 978-1-4419-6141-9. [Google Scholar]
- Olstam, J.; Espié, S.; Måardh, S.; Jansson, J.; Lundgren, J. An Algorithm for Combining Autonomous Vehicles and Controlled Events in Driving Simulator Experiments. Transp. Res. Part C Emerg. Technol. 2011, 19, 1185–1201. [Google Scholar] [CrossRef]
- Wang, Z.; Gupta, R.; Han, K.; Wang, H.; Ganlath, A.; Ammar, N.; Tiwari, P. Mobility Digital Twin: Concept, Architecture, Case Study, and Future Challenges. IEEE Internet Things J. 2022, 9, 17452–17467. [Google Scholar] [CrossRef]
- Bobermin, M.P.; Silva, M.M.; Ferreira, S. Driving Simulators to Evaluate Road Geometric Design Effects on Driver Behaviour: A Systematic Review. Accid. Anal. Prev. 2021, 150, 105923. [Google Scholar] [CrossRef]
- Wang, Z.; Liao, X.; Wang, C.; Oswald, D.; Wu, G.; Boriboonsomsin, K.; Barth, M.J.; Han, K.; Kim, B.G.; Tiwari, P. Driver Behavior Modeling Using Game Engine and Real Vehicle: A Learning-Based Approach. IEEE Trans. Intell. Veh. 2020, 5, 738–749. [Google Scholar] [CrossRef]
- Shi, X.; Chang, H.; Xue, S.; Bao, J.; Zhang, H. Serious Games for Transportation Research: An Overview. In Proceedings of the CICTP 2020: Transportation Evolution Impacting Future Mobility—Selected Papers from the 20th COTA International Conference of Transportation Professionals, Xi’an, China, 14–16 August 2020; American Society of Civil Engineers: Reston, VA, USA, 2020; pp. 4462–4472. [Google Scholar]
- Ejercito, P.M.; Nebrija, K.G.E.; Feria, R.P.; Lara-Figueroa, L.L. Traffic Simulation Software Review. In Proceedings of the 2017 8th International Conference on Information, Intelligence, Systems and Applications, IISA 2017, Larnaca, Cyprus, 27–30 August 2017; Volume 2018, pp. 1–4. [Google Scholar]
- Lu, Z.; Fu, T.; Fu, L.; Shiravi, S.; Jiang, C. A Video-Based Approach to Calibrating Car-Following Parameters in VISSIM for Urban Traffic. Int. J. Transp. Sci. Technol. 2016, 5, 1–9. [Google Scholar] [CrossRef]
- Liu, P.; Qu, X.; Yu, H.; Wang, W.; Cao, B. Development of a VISSIM Simulation Model for U-Turns at Unsignalized Intersections. J. Transp. Eng. 2012, 138, 1333–1339. [Google Scholar] [CrossRef]
- Park, B.; Schneeberger, J. Microscopic Simulation Model Calibration and Validation: Case Study of VISSIM Simulation Model for a Coordinated Actuated Signal System. Transp. Res. Rec. J. Transp. Res. Board 2003, 1856, 185–192. [Google Scholar] [CrossRef]
- Kretz, T.; Hengst, S.; Vortisch, P. Pedestrian Flow at Bottlenecks—Validation and Calibration of Vissim’s Social Force Model of Pedestrian Traffic and Its Empirical Foundations. In Proceedings of the International Symposium of Transport Simulation 2008, Gold Coast, QLD, Australia, 13 May 2008; pp. 1–12. [Google Scholar]
- Lee, S.; Jeong, E.; Oh, M.; Oh, C. Driving Aggressiveness Management Policy to Enhance the Performance of Mixed Traffic Conditions in Automated Driving Environments. Transp. Res. Part A Policy Pract. 2019, 121, 136–146. [Google Scholar] [CrossRef]
- Durrani, U.; Lee, C.; Maoh, H. Calibrating the Wiedemann’s Vehicle-Following Model Using Mixed Vehicle-Pair Interactions. Transp. Res. Part C Emerg. Technol. 2016, 67, 227–242. [Google Scholar] [CrossRef]
- Zhu, M.; Wang, X.; Tarko, A.; Fang, S. Modeling Car-Following Behavior on Urban Expressways in Shanghai: A Naturalistic Driving Study. Transp. Res. Part C Emerg. Technol. 2018, 93, 425–445. [Google Scholar] [CrossRef]
- Tiaprasert, K.; Zhang, Y.; Aswakul, C.; Jiao, J.; Ye, X. Closed-Form Multiclass Cell Transmission Model Enhanced with Overtaking, Lane-Changing, and First-in First-out Properties. Transp. Res. Part C Emerg. Technol. 2017, 85, 86–110. [Google Scholar] [CrossRef]
- Shi, X.; Xue, S.; Feliciani, C.; Shiwakoti, N.; Lin, J.; Li, D.; Ye, Z. Verifying the Applicability of a Pedestrian Simulation Model to Reproduce the Effect of Exit Design on Egress Flow under Normal and Emergency Conditions. Phys. A Stat. Mech. Its Appl. 2021, 562, 125347. [Google Scholar] [CrossRef]
- Huang, F.; Liu, P.; Yu, H.; Wang, W. Identifying If VISSIM Simulation Model and SSAM Provide Reasonable Estimates for Field Measured Traffic Conflicts at Signalized Intersections. Accid. Anal. Prev. 2013, 50, 1014–1024. [Google Scholar] [CrossRef]
- Wang, C.; Xu, C.; Xia, J.; Qian, Z.; Lu, L. A Combined Use of Microscopic Traffic Simulation and Extreme Value Methods for Traffic Safety Evaluation. Transp. Res. Part C Emerg. Technol. 2018, 90, 281–291. [Google Scholar] [CrossRef]
- Abou-Senna, H.; Radwan, E. VISSIM/MOVES Integration to Investigate the Effect of Major Key Parameters on CO2 Emissions. Transp. Res. Part D Transp. Environ. 2013, 21, 39–46. [Google Scholar] [CrossRef]
- Krajzewicz, D.; Hertkorn, G. SUMO (Simulation of Urban MObility) An Open-Source Traffic Simulation. In Proceedings of the Symposium on Simulation, Sharjah, United Arab Emirates, 28–30 September 2002; pp. 63–68. [Google Scholar]
- Wegener, A.; Piórkowski, M.; Raya, M.; Hellbrück, H.; Fischer, S.; Hubaux, J.P. TraCI: An Interface for Coupling Road Traffic and Network Simulators. In Proceedings of the 11th Communications and Networking Simulation Symposium, CNS’08, Ottawa, ON, Canada, 14–17 April 2008; pp. 155–163. [Google Scholar]
- Biurrun-Quel, C.; Serrano-Arriezu, L.; Olaverri-Monreal, C. Microscopic Driver-Centric Simulator: Linking Unity3D and SUMO. In Proceedings of the Advances in Intelligent Systems and Computing, Lviv, Ukraine, 6–10 September 2016; Springer: Berlin/Heidelberg, Germany, 2017; Volume 569, pp. 851–860. [Google Scholar]
- Olaverri-Monreal, C.; Errea-Moreno, J.; Díaz-álvarez, A.; Biurrun-Quel, C.; Serrano-Arriezu, L.; Kuba, M. Connection of the SUMO Microscopic Traffic Simulator and the Unity 3D Game Engine to Evaluate V2X Communication-Based Systems. Sensors 2018, 18, 4399. [Google Scholar] [CrossRef] [PubMed]
- Barbecho Bautista, P.; Urquiza Aguiar, L.; Aguilar Igartua, M. How Does the Traffic Behavior Change by Using SUMO Traffic Generation Tools. Comput. Commun. 2022, 181, 1–13. [Google Scholar] [CrossRef]
- Krajzewicz, D. Traffic Simulation with SUMO—Simulation of Urban Mobility. In International Series in Operations Research and Management Science; Springer: New York, NY, USA, 2010; Volume 145, pp. 269–293. [Google Scholar]
- Lopez, P.A.; Behrisch, M.; Bieker-Walz, L.; Erdmann, J.; Flotterod, Y.P.; Hilbrich, R.; Lucken, L.; Rummel, J.; Wagner, P.; Wiebner, E. Microscopic Traffic Simulation Using SUMO. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; Volume 2018, pp. 2575–2582. [Google Scholar]
- Balakrishna, R.; Morgan, D.; Slavin, H.; Yang, Q. Large-Scale Traffic Simulation Tools for Planning and Operations Management. In Proceedings of the IFAC Proceedings Volumes, Redondo Beach, CA, USA, 2–4 September 2009; Volume 42, pp. 117–122. [Google Scholar]
- Song, Z.; Wang, H.; Sun, J.; Tian, Y. Experimental Findings with VISSIM and TransModeler for Evaluating Environmental and Safety Impacts Using Micro-Simulations. Transp. Res. Rec. J. Transp. Res. Board 2020, 2674, 566–580. [Google Scholar] [CrossRef]
- Hollander, Y.; Liu, R. The Principles of Calibrating Traffic Microsimulation Models. Transportation 2008, 35, 347–362. [Google Scholar] [CrossRef]
- Lu, L.; Yun, T.; Li, L.; Su, Y.; Yao, D. A Comparison of Phase Transitions Produced by PARAMICS, TransModeler, and VISSIM. IEEE Intell. Transp. Syst. Mag. 2010, 2, 19–24. [Google Scholar] [CrossRef]
- Jimenez, D.; Munoz, F.; Arias, S.; Hincapie, J. Software for Calibration of Transmodeler Traffic Microsimulation Models. In Proceedings of the 2016 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC), Rio de Janeiro, Brazil, 1–4 November 2016; pp. 1317–1323. [Google Scholar]
- Zhang, C.; Sabar, N.R.; Chung, E.; Bhaskar, A.; Guo, X. Optimisation of Lane-Changing Advisory at the Motorway Lane Drop Bottleneck. Transp. Res. Part C Emerg. Technol. 2019, 106, 303–316. [Google Scholar] [CrossRef]
- Kamal, M.A.S.; Hashikura, K.; Hayakawa, T.; Yamada, K.; Imura, J. Adaptive Cruise Control with Look-Ahead Anticipation for Driving on Freeways. Appl. Sci. 2022, 12, 929. [Google Scholar] [CrossRef]
- Anya, A.R.; Rouphail, N.M.; Frey, H.C.; Schroeder, B. Application of AIMSUN Microsimulation Model to Estimate Emissions on Signalized Arterial Corridors. Transp. Res. Rec. J. Transp. Res. Board 2014, 2428, 75–86. [Google Scholar] [CrossRef]
- Acuto, F.; Coelho, M.C.; Fernandes, P.; Giuffrè, T.; Macioszek, E.; Granà, A. Assessing the Environmental Performances of Urban Roundabouts Using the VSP Methodology and AIMSUN. Energies 2022, 15, 1371. [Google Scholar] [CrossRef]
- Zuo, K.; Liu, Q.; Sun, J. Modeling and Simulation of Merging Behavior at Urban Expressway On-Ramp. J. Syst. Simul. 2017, 29, 1895. [Google Scholar] [CrossRef]
- Liu, Q.; Sun, J.; Tian, Y.; Xiong, L. Modeling and Simulation of Overtaking Events by Heterogeneous Non-Motorized Vehicles on Shared Roadway Segments. Simul. Model. Pract. Theory 2020, 103, 102072. [Google Scholar] [CrossRef]
- Zhao, X.; Gao, Y.; Jin, S.; Xu, Z.; Liu, Z.; Fan, W.; Liu, P. Development of a Cyber-Physical-System Perspective Based Simulation Platform for Optimizing Connected Automated Vehicles Dedicated Lanes. Expert Syst. Appl. 2023, 213, 118972. [Google Scholar] [CrossRef]
- Bruck, L.; Haycock, B.; Emadi, A. A Review of Driving Simulation Technology and Applications. IEEE Open J. Veh. Technol. 2021, 2, 1–16. [Google Scholar] [CrossRef]
- Godley, S.T.; Triggs, T.J.; Fildes, B.N. Driving Simulator Validation for Speed Research. Accid. Anal. Prev. 2002, 34, 589–600. [Google Scholar] [CrossRef]
- Lee, W.-S.; Kim, J.-H.; Cho, J.-H. A Driving Simulator as a Virtual Reality Tool. In Proceedings of the 1998 IEEE International Conference on Robotics and Automation (Cat. No.98CH36146), Leuven, Belgium, 20 May 1998; Volume 1, pp. 71–76. [Google Scholar]
- Philip, P.; Taillard, J.; Klein, E.; Sagaspe, P.; Charles, A.; Davies, W.L.; Guilleminault, C.; Bioulac, B. Effect of Fatigue on Performance Measured by a Driving Simulator in Automobile Drivers. J. Psychosom. Res. 2003, 55, 197–200. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.; Wang, X.; Cai, B.; Liu, J. Combined Alignment Effects on Deceleration and Acceleration: A Driving Simulator Study. Transp. Res. Part C Emerg. Technol. 2019, 104, 172–183. [Google Scholar] [CrossRef]
- Lee, J.D.; McGehee, D.V.; Brown, T.L.; Reyes, M.L. Collision Warning Timing, Driver Distraction, and Driver Response to Imminent Rear-End Collisions in a High-Fidelity Driving Simulator. Hum. Factors J. Hum. Factors Ergon. Soc. 2002, 44, 314–334. [Google Scholar] [CrossRef]
- Meng, F.; Wong, S.C.; Yan, W.; Li, Y.C.; Yang, L. Temporal Patterns of Driving Fatigue and Driving Performance among Male Taxi Drivers in Hong Kong: A Driving Simulator Approach. Accid. Anal. Prev. 2019, 125, 7–13. [Google Scholar] [CrossRef]
- Brooks, J.O.; Crisler, M.C.; Klein, N.; Goodenough, R.; Beeco, R.W.; Guirl, C.; Tyler, P.J.; Hilpert, A.; Miller, Y.; Grygier, J.; et al. Speed Choice and Driving Performance in Simulated Foggy Conditions. Accid. Anal. Prev. 2011, 43, 698–705. [Google Scholar] [CrossRef]
- Rong, J.; Mao, K.; Ma, J. Effects of Individual Differences on Driving Behavior and Traffic Flow Characteristics. Transp. Res. Rec. J. Transp. Res. Board 2011, 2248, 1–9. [Google Scholar] [CrossRef]
- Feng, Y.; Duives, D.C.; Hoogendoorn, S.P. Wayfinding Behaviour in a Multi-Level Building: A Comparative Study of HMD VR and Desktop VR. Adv. Eng. Inform. 2022, 51, 101475. [Google Scholar] [CrossRef]
- Lebram, M.; Engstr, H. A Driving Simulator Based on Video Game Technology. In SIGRAD 2006: The Annual SIGRAD Conference; Linköping University Electronic Press: Linköping, Sweden, 2006; Volume 20, pp. 39–43. [Google Scholar]
- Keshavarz, B.; Ramkhalawansingh, R.; Haycock, B.; Shahab, S.; Campos, J.L. Comparing Simulator Sickness in Younger and Older Adults during Simulated Driving under Different Multisensory Conditions. Transp. Res. Part F Traffic Psychol. Behav. 2018, 54, 47–62. [Google Scholar] [CrossRef]
- Hartfiel, B.; Stark, R. Validity of Primary Driving Tasks in Head-Mounted Display-Based Driving Simulators. Virtual Real. 2021, 25, 819–833. [Google Scholar] [CrossRef]
- Erath, A.; Maheshwari, T.; Joos, M.; Kupferschmid, J.; van Eggermond, M. Visualizing Transport Futures: The Potential of Integrating Procedural 3d Modelling and Traffic Micro-Simulation in Virtual Reality Applications. In Proceedings of the Transportation Research Board, 96th Annual Meeting, Washington, DC, USA, 8–12 January 2017; Volume 1185, pp. 12–19. [Google Scholar]
- Liao, X.; Zhao, X.; Wang, Z.; Han, K.; Tiwari, P.; Barth, M.J.; Wu, G. Game Theory-Based Ramp Merging for Mixed Traffic with Unity-SUMO Co-Simulation. IEEE Trans. Syst. Man Cybern. Syst. 2022, 52, 5746–5757. [Google Scholar] [CrossRef]
- Li, H.; Zhang, J.; Xia, L.; Song, W.; Bode, N.W.F. Comparing the Route-Choice Behavior of Pedestrians around Obstacles in a Virtual Experiment and a Field Study. Transp. Res. Part C Emerg. Technol. 2019, 107, 120–136. [Google Scholar] [CrossRef]
- Bogacz, M.; Hess, S.; Calastri, C.; Choudhury, C.F.; Mushtaq, F.; Awais, M.; Nazemi, M.; van Eggermond, M.A.B.; Erath, A. Modelling Risk Perception Using a Dynamic Hybrid Choice Model and Brain-Imaging Data: An Application to Virtual Reality Cycling. Transp. Res. Part C Emerg. Technol. 2021, 133, 103435. [Google Scholar] [CrossRef]
- Morra, L.; Lamberti, F.; Gabriele Prattico, F.; Rosa, S.L.; Montuschi, P. Building Trust in Autonomous Vehicles: Role of Virtual Reality Driving Simulators in HMI Design. IEEE Trans. Veh. Technol. 2019, 68, 9438–9450. [Google Scholar] [CrossRef]
- Perez, D.; Hasan, M.; Shen, Y.; Yang, H. AR-PED: A Framework of Augmented Reality Enabled Pedestrian-in-the-Loop Simulation. Simul. Model. Pract. Theory 2019, 94, 237–249. [Google Scholar] [CrossRef]
- Ren, R.; Li, H.; Han, T.; Tian, C.; Zhang, C.; Zhang, J.; Proctor, W.; Chen, Y.; Feng, Y. Vehicle Crash Simulations for Safety: Introduction of Connected and Automated Vehicles on the Roadways. Accid. Anal. Prev. 2023, 186, 107021. [Google Scholar] [CrossRef]
- Jia, D.; Sun, J.; Sharma, A.; Zheng, Z.; Liu, B. Integrated Simulation Platform for Conventional, Connected and Automated Driving: A Design from Cyber–Physical Systems Perspective. Transp. Res. Part C Emerg. Technol. 2021, 124, 102984. [Google Scholar] [CrossRef]
- Pawar, N.M.; Velaga, N.R.; Sharmila, R.B. Exploring Behavioral Validity of Driving Simulator under Time Pressure Driving Conditions of Professional Drivers. Transp. Res. Part F Traffic Psychol. Behav. 2022, 89, 29–52. [Google Scholar] [CrossRef]
- Kaptein, N.A.; Theeuwes, J.; van der Horst, R. Driving Simulator Validity: Some Considerations. Transp. Res. Rec. J. Transp. Res. Board 1996, 1550, 30–36. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Simulation Platform | VISSIM | SUMO | TransModeler | AIMSUN | TESS NG |
|---|---|---|---|---|---|
| Developer | PTV (GER) | DLR (GER) | Caliper (USA) | TSS (ESP) | Jida (CHN) |
| Operating System | Windows/Linux | Windows/ Linux/Mac | Windows | Windows/ Linux/Mac | Windows/ Linux |
| Simulation level | Micro | Macro/Micro | Macro/Micro | Macro/Micro | Micro |
| Display mode | 2D/3D | 2D | 2D/3D | 2D/3D | 2D/3D |
| Open source | × | √ | × | × | × |
| API | COM | TraCI | GISDK | GETRAM Extensions | Python/C++ |
| Road network import | √ | √ | √ | √ | √ |
| Traffic control | √ | √ | √ | √ | √ |
| Acceleration | Velocity | Yaw Angle | |
|---|---|---|---|
| Acceleration | 1 | −0.127 | −0.15 |
| Sig. (2-tailed) | 0.000 | 0.001 | |
| Velocity | −0.127 | 1 | 0.26 |
| Sig. (2-tailed) | 0.000 | 0.000 | |
| Yaw angle | −0.15 | 0.26 | 1 |
| Sig. (2-tailed) | 0.001 | 0.000 |
| R | R Square | Adjusted R Square | Durbin-Waston |
|---|---|---|---|
| 0.122 | 0.15 | 14.30003 | 0.210 |
| Model | Sum of Squares | df | Mean Square | F | Sig. |
|---|---|---|---|---|---|
| Regression | 143,356.149 | 2 | 71,678.074 | 350.520 | 0.000 |
| Residual | 9,514,553.053 | 46,189 | 204.491 | ||
| Total | 9,657,909.202 | 46,191 |
| Model | Unstandardized Coefficients | Standardized Coefficients | t | Sig. | |
|---|---|---|---|---|---|
| B | Std. Error | Beta | |||
| Constant | 28.567 | 0.154 | 185.354 | 0.000 | |
| Acceleration | −0.163 | 0.006 | −0.121 | −26.235 | 0.000 |
| Yaw angle | 0.110 | 0.027 | 0.019 | 4.092 | 0.000 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, X.; Yang, S.; Ye, Z. Development of a Unity–VISSIM Co-Simulation Platform to Study Interactive Driving Behavior. Systems 2023, 11, 269. https://doi.org/10.3390/systems11060269
Shi X, Yang S, Ye Z. Development of a Unity–VISSIM Co-Simulation Platform to Study Interactive Driving Behavior. Systems. 2023; 11(6):269. https://doi.org/10.3390/systems11060269
Chicago/Turabian StyleShi, Xiaomeng, Shuai Yang, and Zhirui Ye. 2023. "Development of a Unity–VISSIM Co-Simulation Platform to Study Interactive Driving Behavior" Systems 11, no. 6: 269. https://doi.org/10.3390/systems11060269
APA StyleShi, X., Yang, S., & Ye, Z. (2023). Development of a Unity–VISSIM Co-Simulation Platform to Study Interactive Driving Behavior. Systems, 11(6), 269. https://doi.org/10.3390/systems11060269