MBSE with/out Simulation: State of the Art and Way Forward




Abstract
:1. Introduction
2. Developments in Modeling and Simulation and DEVS
2.1. MBSE, DEVS and CAS: Towards Unification
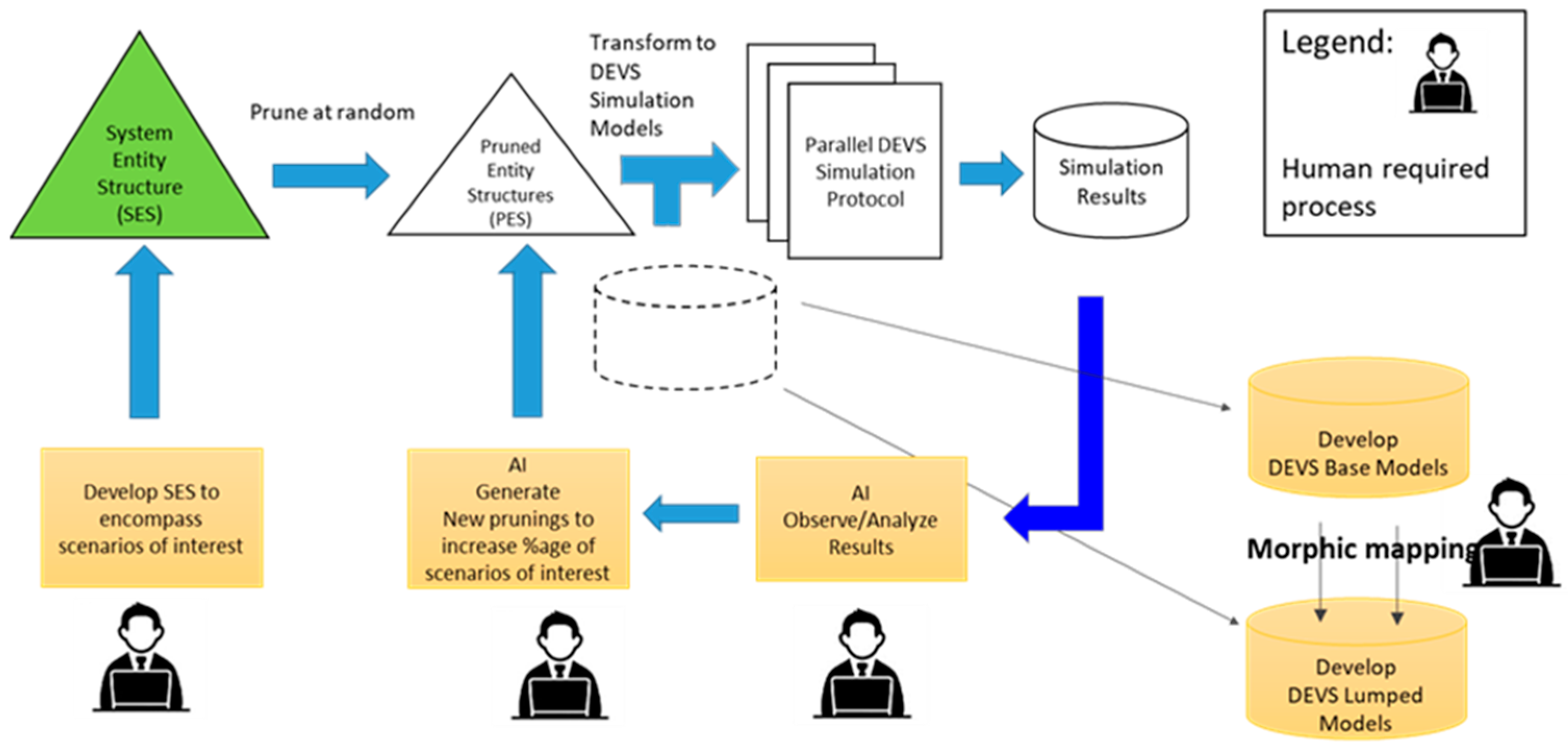
2.2. Architecture and Workflow for M&S Working within MBSE
3. Multifacetted Modeling and Simulation: Multiobjective, Multiperspective, Multiresolution Families of Models
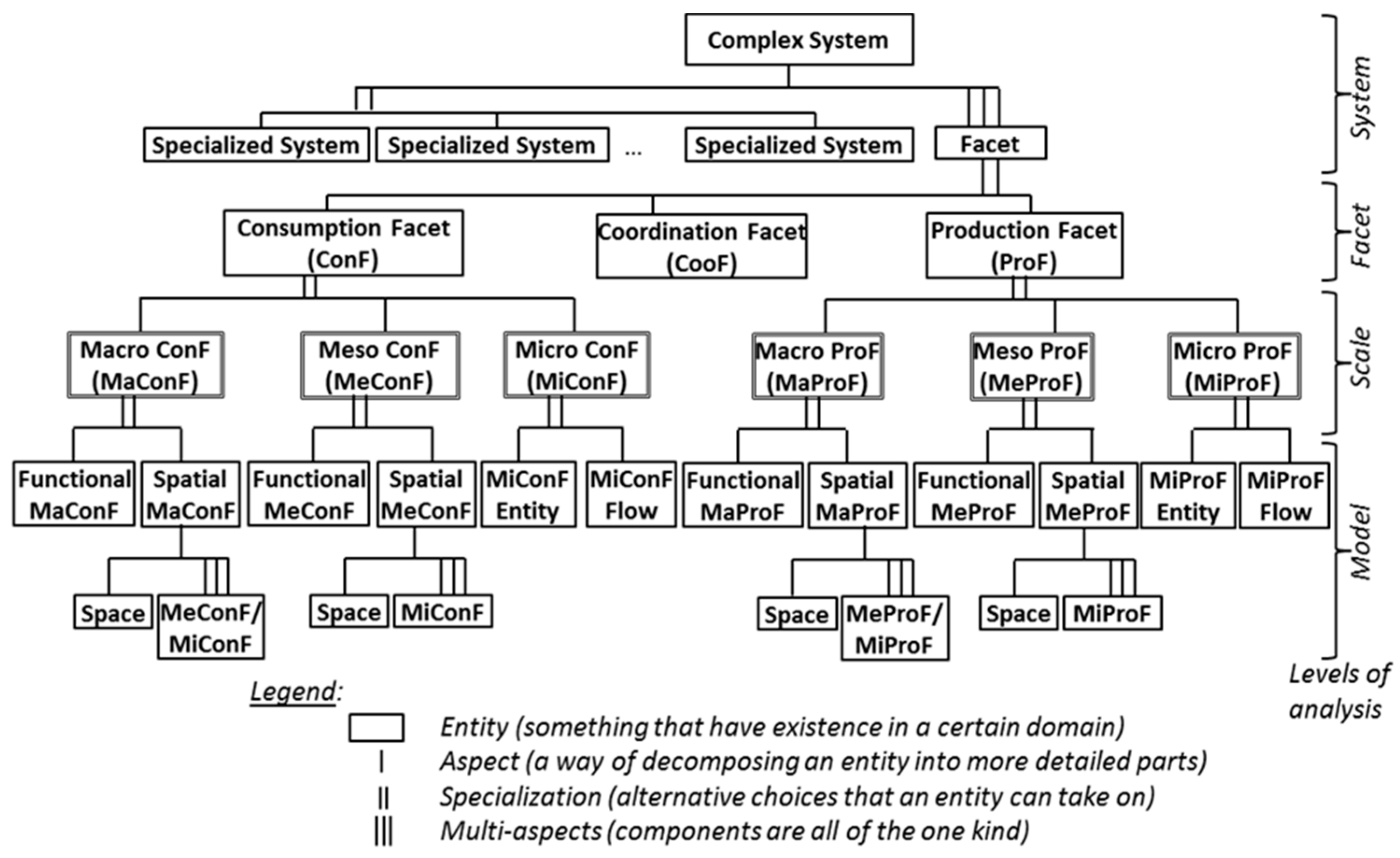
3.1. Multi-Perspective Families of Models
- System level, where meaningful specializations of the class of systems that characterizes the domain of interest are highlighted,
- Facet level, where all cumulative aspects of a domain system are clearly separated,
- Scale level, where major spatial and temporal scales are emphasized,Model level, where conventional models often originating from decades of theoretical findings are identified as reusable artefacts to be selected and integrated in new studies.
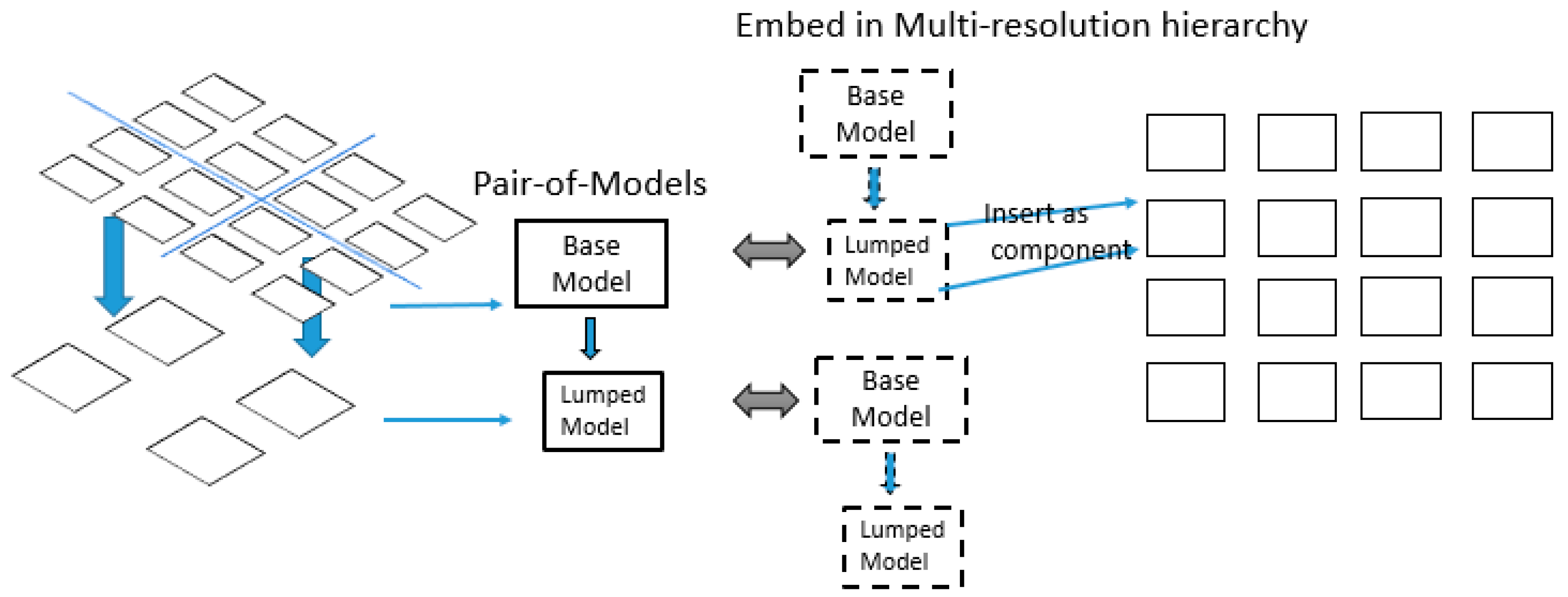
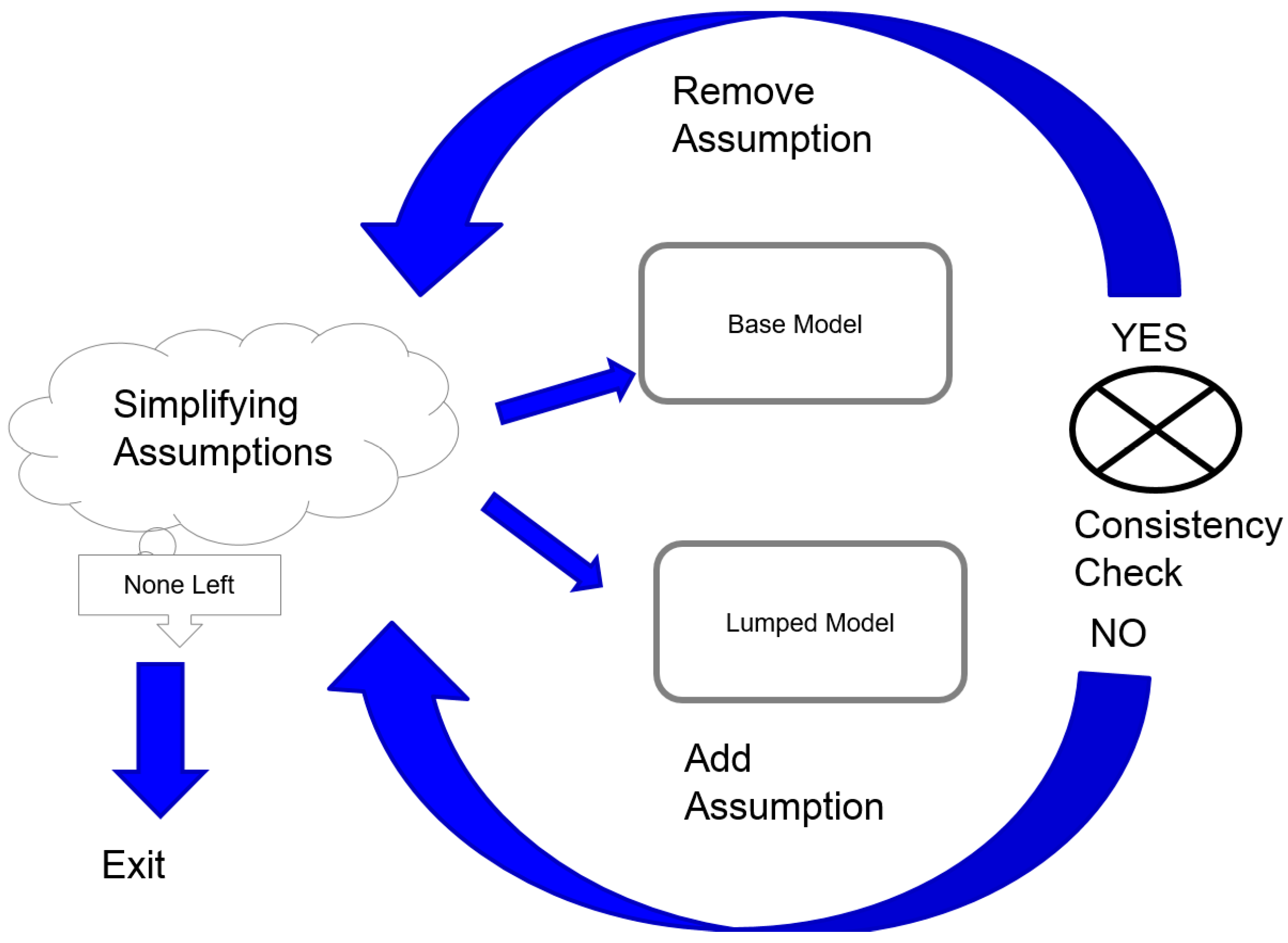
3.2. Multi-Resolution Families of Models
4. Simulation Capabilities and Tools
5. Discussion and Way Forward
6. Conclusions
Author Contributions
Conflicts of Interest
Disclaimer
Appendix A. Multifaceted Model Family Example
- UAVMotion is a discrete event model representing the motion of the UAVs as agents in space employing only the kinetic parameters of the vehicles and the random space-time distribution of requests to get a first order prediction of the number required to meet the demand.
- MarkovDutyCycleCTM represents the duty cycle of a typical UAV as a Markov stochastic process with a small number of states representing its location as at the depot or in the service area and able or not to provide service.
- Multiwork represents the UAVs as individual servers in a discrete event model with a simple bidding protocol to coordinate response to incoming requests with the servers progressing through a duty cycle consistent with the Markov model.
- Hierarchical Composition elaborates on the Multiwork model by incorporating states of the vehicles (e.g., carrying patient) that bear upon speed of travel and available fuel. Hierarchical structure results from representation of UAV as itself a composite with components representing coordination protocols, kinetics, and fuel consumption.
- Design for Adaptive Sustainment is discussed later.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| # | Objectives | Models Needed |
|---|---|---|
| 1 | Determine travel and payload requirements for UAVs and personnel | Kinetic models of UAVs, capacities for carrying medical appliances Paramedic capabilities |
| 2 | Select locations of depots and deployment sites | Real estate cost, distances involved, traffic characterization |
| 3 | Response policy optimization | Centralized vs. distributed decision making of which UAV to handle emergency call |
| 4 | Marketing | Environment: consumer tastes, competition |
| 5 | Safety assurance | Design of alarms, escape routes, fail-safe plans |
| 6 | Interfacing with existing systems | Coordination mechanisms, communication protocols, interoperability |
| 7 | Patient satisfaction | Waiting time, comfort, etc. |
| 8 | Determine Emergency response required | Types and frequencies of medical emergencies to be treated Response timelines requirements and how to meet them |
| 9 | Autonomous adaptive behavior | Ability to adapt to changing environments associated with different catastrophic events |
| 10 | System sustainment, maintenance and evolution | Pricing of services, costs of equipment, investment capital, long term trends, unused capacity, growth potential |
| Model | Assumption | Limitation | Contribution |
|---|---|---|---|
| UAVMotion | Kinetic spatial distribution of requests, policy employs visibility and spatial properties | No duty cycle representation No startup No product properties | Predicts number of UAVs required under fundamental spatial properties |
| MarkovDutyCycleCTM | Combined stochastic and deterministic representation of duty cycle | Above limitations + Lumps UAVS into single number that determines service rate | Predicts numbers required under simple duty cycle approximation |
| Multi-workflow | UAVs individually represented as servers in duty cycle, UAV distance to request employed, policy employs visibility & spatial properties | No product properties—capacity and abstracted work cycle | More refined prediction including performance/cost from Pareto frontier |
| Hierarchical composition | All requirements 1–3 and 8 and constraints accounted for to first approximation | No spatial representation, no account of energy utilization | Good solution approximation under service requirements/constraints—agrees with earlier predictions |
| Design for Adaptive Sustainment | Extends UAVMotion model with economic UAV “earn their keep” mechanism and modification of fleet size | Same as UAVMotion plus simplification of economics and fleet size modification | Can predict dynamics of “carrying capacity” including fleet size equilibrium in fixed demand environment |
References
- Wymore, A.W. Model-Based Systems Engineering; CRC Press: Boca Raton, FL, USA, 1993. [Google Scholar]
- Wymore, A.W. A Mathematical Theory of Systems Engineering: The Elements; Krieger: Huntington, NY, USA, 1967. [Google Scholar]
- Dahmann, J. Systems Engineering Guide; MITRE Publication: McLean, VA, USA, 2018. [Google Scholar]
- Mittal, S. Model Engineering for Cyber Complex Adaptive Systems. In Proceedings of the European Modeling and Simulation Symposium, Bordeaux, France, 10–12 September 2014. [Google Scholar]
- Mittal, S.; Martin, J.L.R. Simulation-based Complex Adaptive Systems. In Guide to Simulation-Based Disciplines: Advancing Our Computational Future; Mittal, S., Durak, U., Oren, T., Eds.; Springer: New York, NY, USA, 2017. [Google Scholar]
- Mittal, S. Emergence in Stigmergic and Complex Adaptive Systems: A formal Discrete Event Systems perspective. Cogn. Syst. Res. 2013, 21, 22–39. [Google Scholar] [CrossRef]
- Mittal, S.; Rainey, L.B. Harnessing Emergence: The Design and Control of Emergent Behavior in System of Systems Engineering. In Proceedings of the Summer Computer Simulation Conference, Chicago, IL, USA, 24–27 July 2016. [Google Scholar]
- Orellana, D.; Madni, A. Extending model based systems engineering for human machine interaction analysis and fault tolerant design. In Proceedings of the Infotech@Aerospace, Garden Grove, CA, USA, 19–21 June 2012. [Google Scholar]
- Tolk, A.; Diallo, S.; Mittal, S. The Challenge of Emergence in Complex Systems Engineering. In Emergent Behavior in Complex Systems Engineering: A Modeling and Simulation Approach; Mittal, S., Diallo, S., Tolk, A., Eds.; John Wiley & Sons Ltd: Hoboken, NJ, USA, 2018. [Google Scholar]
- Mittal, S.; Diallo, S.; Tolk, A. Emergent Behavior in Complex Systems Engineering: A Modeling and Simulation Approach; John Wiley & Sons Ltd: Hoboken, NJ, USA, 2018. [Google Scholar]
- Mittal, S.; Durak, U.; Oren, T. Guide to Simulation-Based Disciplines: Advancing Our Computational Future; Springer: New York, NY, USA, 2017. [Google Scholar]
- Svyatoslav, K. The Practice of Enterprise Architecture: A Modern Approach to Business and IT Alignment; SK Publishing: Melbourne, Australia, 2018. [Google Scholar]
- Zeigler, B.P.; Nutaro, J.J. Towards a Framework for More Robust Validation and Verification of Simulation Models for Systems of Systems. JDMS Appl. Methodol. Technol. 2016, 13, 3–16. [Google Scholar] [CrossRef]
- Diallo, S.; Mittal, S.; Tolk, A. Research Agenda for Next Generation Complex Systems Engineering. In Emergent Behavior in Complex Systems Engineering: A Modeling and Simulation Approach; John Wiley & Sons Ltd: Hoboken, NJ, USA, 2018. [Google Scholar]
- Mittal, S.; Zeigler, B.P. Theory and Practice of M&S in Cyber Environments. In The Profession of Modeling and Simulation: Discipline, Ethics, Education, Vocation, Societies and Economics; Tolk, A., Oren, T., Eds.; John Wiley & Sons Ltd: Hoboken, NJ, USA, 2017. [Google Scholar]
- Zeigler, B.P.; Muzy, A.; Kofman, E. Theory of Modeling and Simulation, 3rd ed.; Academic Press: New York, NY, USA, 2018. [Google Scholar]
- Mittal, S.; Martin, J.L.R. Netcentric System of Systems Engineering with DEVS Unified Process; CRC Press: Boca Raton, FL, USA, 22 February 2013. [Google Scholar]
- Camus, B.; Paris, T.; Vaubourg, J.; Presse, Y.; Bourjot, C.; Ciarletta, L.; Chevrier, V. Co-simulation of cyber-physical systems using a DEVS wrapping strategy in the MECSYCO middleware. SAGE J. Simul. 2018. [Google Scholar] [CrossRef]
- Zeigler, B.P.; Marvin, J.W.; Cadigan, J.J. Systems Engineering and Simulation: Converging Toward Noble Causes. In Proceedings of the 2018 Winter Simulation Conference, Gothenburg, Sweden, 9–12 December 2018. [Google Scholar]
- Bocciarelli, P.; D’Ambrogio, A.; Giglio, A.; Paglia, E. Model Transformation Services for MSaaS Platforms. In Proceedings of the Model-driven Approaches for Simulation Engineering Symposium, Baltimore, MD, USA, 15–18 April 2018. [Google Scholar]
- Amissah, M.; Toba, A.L.; Handley, H.A.H.; Seck, M. Towards a Framework for Executable Systems Modeling: An Executable Systems Modeling Language. In Proceedings of the Model-Driven Approaches for Simulation Engineering Symposium, Baltimore, MD, USA, 15–18 April 2018. [Google Scholar]
- Aliyu, H.O.; Maïga, O.; Traoré, M.K. The high level language for system specification: A model-driven approach to systems engineering. Int. J. Model. Simul. Sci. Comput. 2016, 7. [Google Scholar] [CrossRef]
- Abdurrahman, A.; Sarjoughian, H. Model-Driven Time-Accurate DEVS-Based Approaches for Design. In Proceedings of the Model-Driven Approaches for Simulation Engineering Symposium, Baltimore, MD, USA, 15–18 April 2018. [Google Scholar]
- Madni, A.M. Transdisciplinary Systems Engineering: Exploiting Convergence in a Hyper-Connected World; Springer: Heidelberg, Germany, 2018. [Google Scholar]
- Kavak, H.; Padilla, J.; Lynch, C.; Dialio, S. Big Data, Agents, and Machine Learning: Towards A Data-Driven Agent-Based Modeling Approach. In Proceedings of the Annual Simulation Symposium, Baltimore, MD, USA, 15–18 April 2018. [Google Scholar]
- Wang, F.; Zhang, J.J.; Zheng, X.; Wang, X.; Yuan, Y.; Dai, X.; Zhang, J.; Yang, L. Where Does AlphaGo Go: From Church-Turing Thesis to AlphaGo Thesis and Beyond. IEEE/CAA J. Autom. Sin. 2018, 3, 113–120. [Google Scholar]
- Zeigler, B.P. Multifaceted Modeling and Discrete Event Simulation; Academic Press: Cambridge, MA, USA, 1984. [Google Scholar]
- Pawletta, T.; Schmidt, A.; Zeigler, B.P.; Durak, U. Extended Variability Modeling Using System Entity Structure Ontology Within MATLAB/Simulink. In Proceedings of the 49th Annual Simulation Symposium, Pasadena, CA, USA, 3–6 April 2016. [Google Scholar]
- Choi, S.H. Ranking and Selection Framework for Efficient Reverse Simulation. Ph. D. Dissertation, Korea Advanced Institute of Science and Technology, Daejeon, Korea, 13 June 2018. [Google Scholar]
- Zeigler, B.P. Simulation-based Evaluation of Morphisms for Model Library Organization. In Model Engineering for Simulation; Zhang, L., Lie, L., Zeigler, B.P., Eds.; Elsevier: New York, NY, USA, 2019. [Google Scholar]
- Zeigler, B.P.; Mittal, S.; Traoré, M.K. Fundamental Requirements and DEVS Approach for Modeling and Simulation of Complex Adaptive System of Systems: Healthcare Reform. In Proceedings of the Symposium on Modeling and Simulation of Complexity in Intelligent, Adaptive and Autonomous Systems, Baltimore, MD, USA, 15–18 April 2018. [Google Scholar]
- Jepperson, R.; Meyer, J.W. Multiple Levels of Analysis and the Limitations of Methodological Individualisms. Sociol. Theory 2011, 29, 54–73. [Google Scholar] [CrossRef]
- Davis, P.K.; Bigelow, J.H. Experiments in Multi Resolution Modeling (MRM); Rand: Santa Monica, CA, USA, 1998. [Google Scholar]
- NPS Faculty. Aggregated Combat Models. Available online: http://faculty.nps.edu/awashburn/Washburnpu/aggregated.pdf (accessed on 3 April 2017).
- Davis, P.K.; Hillestad, R. Families of Models that Cross Levels of Resolution: Issues for Design, Calibration and Management. In Proceedings of the Winter Simulation Conference, Los Angeles, CA, USA, 12–15 December 1993. [Google Scholar]
- Martin, J.L.R.; Mittal, S. Model Management and Execution in DEVS Unified Process. In Model Engineering for Simulation; Zhang, L., Zeigler, B.P., Laili, Y., Eds.; Academic Press: Cambridge, MA, USA, 1 March 2019. [Google Scholar]
- MBSE Wiki. Available online: http://omgwiki.org/MBSE/doku.php (accessed on 11 November 2018).
- Zeigler, B.P.; Sarjoughian, H. Guide to Modeling and Simulation of System of Systems; Springer: New York, NY, USA, 2017. [Google Scholar]
- Zeigler, B.P.; Nutaro, J.J.; Seo, C. Combining DEVS and model-checking: concepts and tools for integrating simulation and analysis. Int. J. Simul. Process. Model. 2017, 12. [Google Scholar] [CrossRef]
- Gholami, S. Combined DEVS multiresolution simulation and model checking. In Proceedings of the Winter Simulation Conference, Las Vegas, NV, USA, 3–6 December 2017. [Google Scholar]
- Neto, V.V.G.; Manzano, W.; Kassab, M.; Nakagawa, E.Y. Model-Based Engineering & Simulation of Software-Intensive Systems-of-Systems. In Proceedings of the 12th European Conference on Software Architecture: Companion Proceedings, Madrid, Spain, 24–28 September 2018. [Google Scholar]
- Arrow, K.; Bolin, B.; Costanza, R.; Dasgupta, P.; Folke, C.; Holling, C.S.; Jansson, B.O.; Levin, S.; Mäler, K.G.; Perrings, C.; Pimentel, D. Economic Growth, Carrying Capacity, and the Environment Science. Ecol. Econ. 1995, 15, 91–95. [Google Scholar] [CrossRef]
- Sutton, R.S.; Barto, A.G. Reinforcement Learning: An Introduction, Bradford Book; MIT Press: Cambridge, MA, USA, 1998. [Google Scholar]
- Muzy, A.; Zeigler, B.P. Activity-Based Credit Assignment Heuristic for Simulation-Based Stochastic Search in a Hierarchical Model Base of Systems. IEEE Syst. J. 2017, 11, 1916–1927. [Google Scholar] [CrossRef] [Green Version]
- Vasbinder, J.W.; Gao, H. Selected Papers of John H. Holland: A Pioneer In Complexity Science; World Scientific Press: Singapore, 2018. [Google Scholar] [CrossRef]
- Whitehead, A.N.; Russell, B. Principia Mathematica; Cambridge University Press: Cambridge, MA, USA, 1913. [Google Scholar]
- Maier, M.W. Architecting Principles for Systems-of-Systems. J. Int. Counc. Syst. Eng. 1998, 1, 267–284. [Google Scholar] [CrossRef]
- Ören, T.; Mittal, S.; Durak, U. Induced Emergence in Computational Social Systems Engineering: Multimodels and Dynamic Couplings as Methodological Basis. In Emergent Behavior in Complex Systems Engineering: A Modeling and Simulation Approach; Mittal, S., Diallo, S., Tolk, A., Eds.; John Wiley & Sons Ltd: Hoboken, NJ, USA, 2018. [Google Scholar]
- Zeigler, B.P. Structuring the Organization of Partial Models. Int. J. Gen. Syst. 1978, 4, 81–88. [Google Scholar] [CrossRef]




| Base Model | Lumped Model | |
|---|---|---|
| Objectives | Results traceable to specific performance data and assumptions. Evaluate subtle differences in weapons, sensors, or tactics, Understand how different inputs affect combat performance | Predict overall results Include small numbers of parameters Parameter values amenable to identification from feasibly obtainable data |
| Representation | Individual agents as separate entities | Aggregate entities into groups typically respecting command hierarchy. |
| Entity Attributes and Variables | Location in space and time, position in social or other hierarchies, perception of the situation: threats and opportunities, capabilities, etc. updated at event occurrences or time steps | Averaged entity values attributed to groups, Discrete events compounded into rates for groups, Global state sets, cross-products of individual state sets |
| Interaction processes | Decomposed into sequences of events and activities, Tracking of individual behaviors | Processes aggregated into group level formulae abstracting individual behavior |
| Timing mechanisms | Coordinate the event sequences for the numerous participants so that subtle interaction patterns can be modeled | Micro stochastic sequences can be aggregated into macro behaviors using law of large numbers expressed more simply in stochastic or deterministic form |
| Computational Complexity (Scope/resolution/ interactionproduct) | Lean towards large scope, high resolution and unconstrained interaction | Lean towards smaller scope, low resolution and constrained interaction |
| Development | Description |
|---|---|
| Deal with SoS nature | The framework provides a multiperspective methodology for developing coupled models of components from various formalisms capable of expressing the different perspectives needed for SoS together with holistic abstractions that support integration and coordination [17,38,39,40,41]. |
| Develop an effective organizational ontology | DEVS-based M&S includes the macro level facets that properly organizes the CASOS domain and supports refinement into more detailed components at the meso and micro levels. |
| Enable the ontology to support combinatorial model compositions and exploration | The SES/MB (Model Base) supports hierarchical composition of the coupled model resulting from pruning that selects from the combinatorial family of possible compositions described by the SES. The DEVS formalism which can encompass models expressed in various formalisms typically found to be useful in simulation studies [38]. MBIS can enhance exploration of model behaviors in LVC settings [24]. |
| Include the major facets major facets to ensure representation of all levels (macro, meso, and micro) of behavior, | The 4-layered ontology highlights at each layer a generic key characteristic. It capitalizes on the abstractions used for the simulation of the entire targeted domain. |
| Include a large spectrum of models for combinatorial composition | An example in healthcare [31] illustrates models spanning health diffusion, resource allocation, provider and provision modeling, population diffusion, spatial models including agent-based models at individual and higher level abstractions including coordination mechanisms. |
| Instrument the complex system to support on-going high quality data | The MSF includes experimental frames that can specify, collect and aggregate the information for higher levels in a multiperspective model. The simulation infrastructure guarantees correct execution of the composed model and the behaviors in a transparent manner [5,17]. |
| Include pervasive incremental automated learning | A wide variety of mechanisms is available at different levels of abstraction and computational complexity with typical parallels drawn to biologically inspired learning and evolutionary processes including activity-based credit assignment, unsupervised techniques (e.g., clustering, rule mining) and reinforcement learning [42,43,44,45]. These can be based on the premise that new system states are being continuously captured in timely snapshots of data and added to an accumulated repository representing the system knowledge supporting iterative training employing updates in the system behavior. |
| Maturity Level | INCOSE MBSE Roadmap | Correlation with DEVS M&S Development |
|---|---|---|
| 1 | Emerging MSBE Standards | DEVS model standard and DEVS simulation protocol standard |
| 2 | Matured MBSE methods and metrics: Integrated System (Hardware/Software) models | Experimental Frame representation of metrics, DEVS models for Integrated Systems |
| 3 | Architecture Models Integrated with Simulation, Analysis, and Visualization | DEVS framework for Architecture models and support for analysis and visualization |
| 4 | Defined MBSE theory, ontology and formalisms | See Table 2 |
| 5 | Distributed and secure model repositories crossing multiple domains | See Table 2 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zeigler, B.P.; Mittal, S.; Traore, M.K. MBSE with/out Simulation: State of the Art and Way Forward. Systems 2018, 6, 40. https://doi.org/10.3390/systems6040040
Zeigler BP, Mittal S, Traore MK. MBSE with/out Simulation: State of the Art and Way Forward. Systems. 2018; 6(4):40. https://doi.org/10.3390/systems6040040
Chicago/Turabian StyleZeigler, Bernard P., Saurabh Mittal, and Mamadou Kaba Traore. 2018. "MBSE with/out Simulation: State of the Art and Way Forward" Systems 6, no. 4: 40. https://doi.org/10.3390/systems6040040
APA StyleZeigler, B. P., Mittal, S., & Traore, M. K. (2018). MBSE with/out Simulation: State of the Art and Way Forward. Systems, 6(4), 40. https://doi.org/10.3390/systems6040040