
Distributed Parameter State Estimation for the Gray–Scott Reaction-Diffusion Model



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Observer Design
2.1. Available Measurements and Main Results
2.2. Observer Setup
2.3. Proof of Theorem 1
3. Numerical Case Studies and Discussion
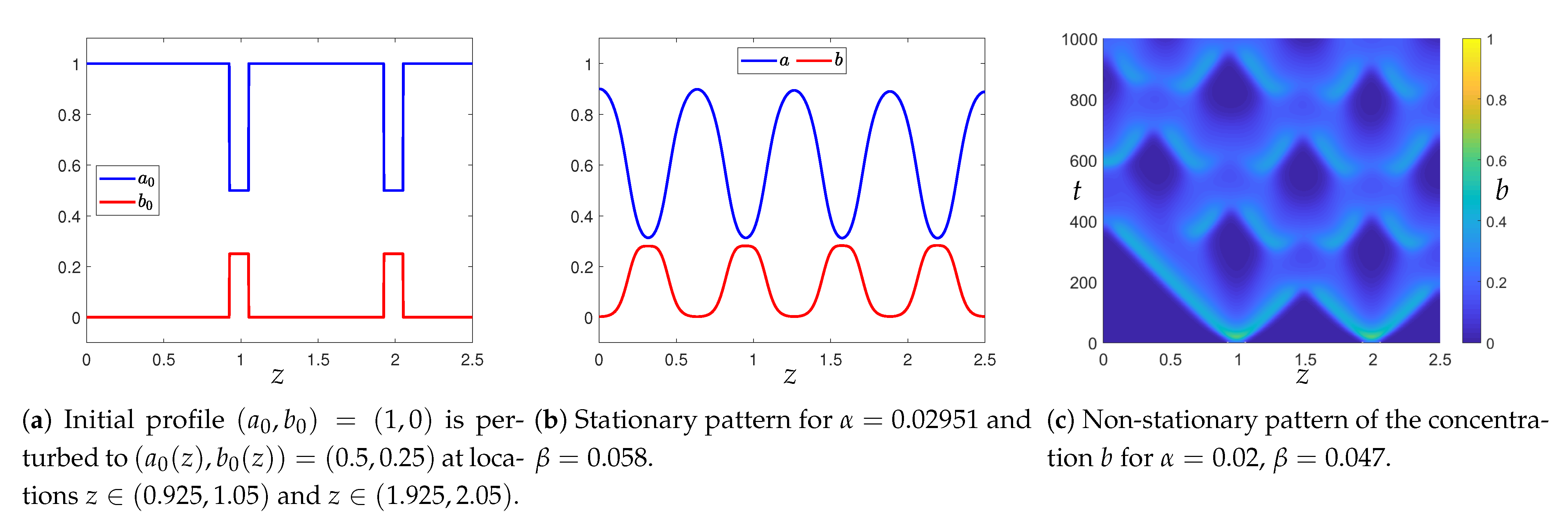
3.1. Example 1 (Stationary Pattern)
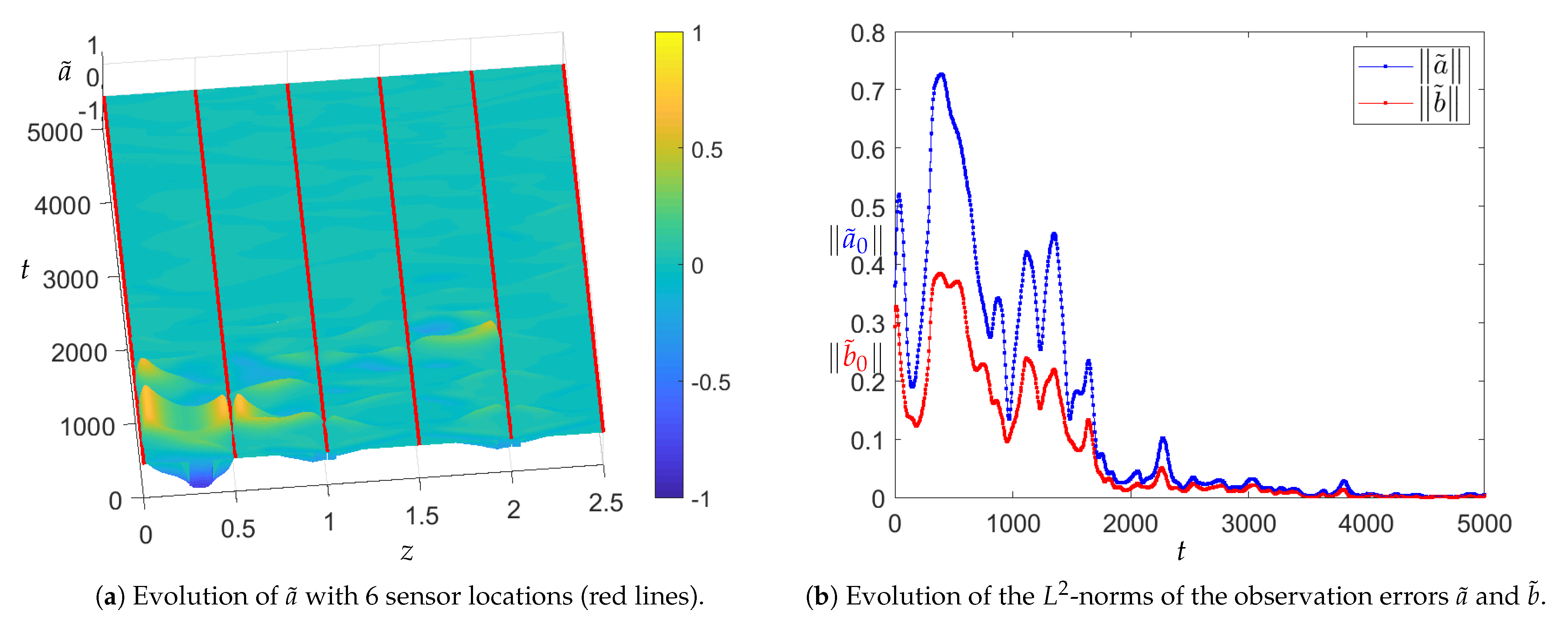
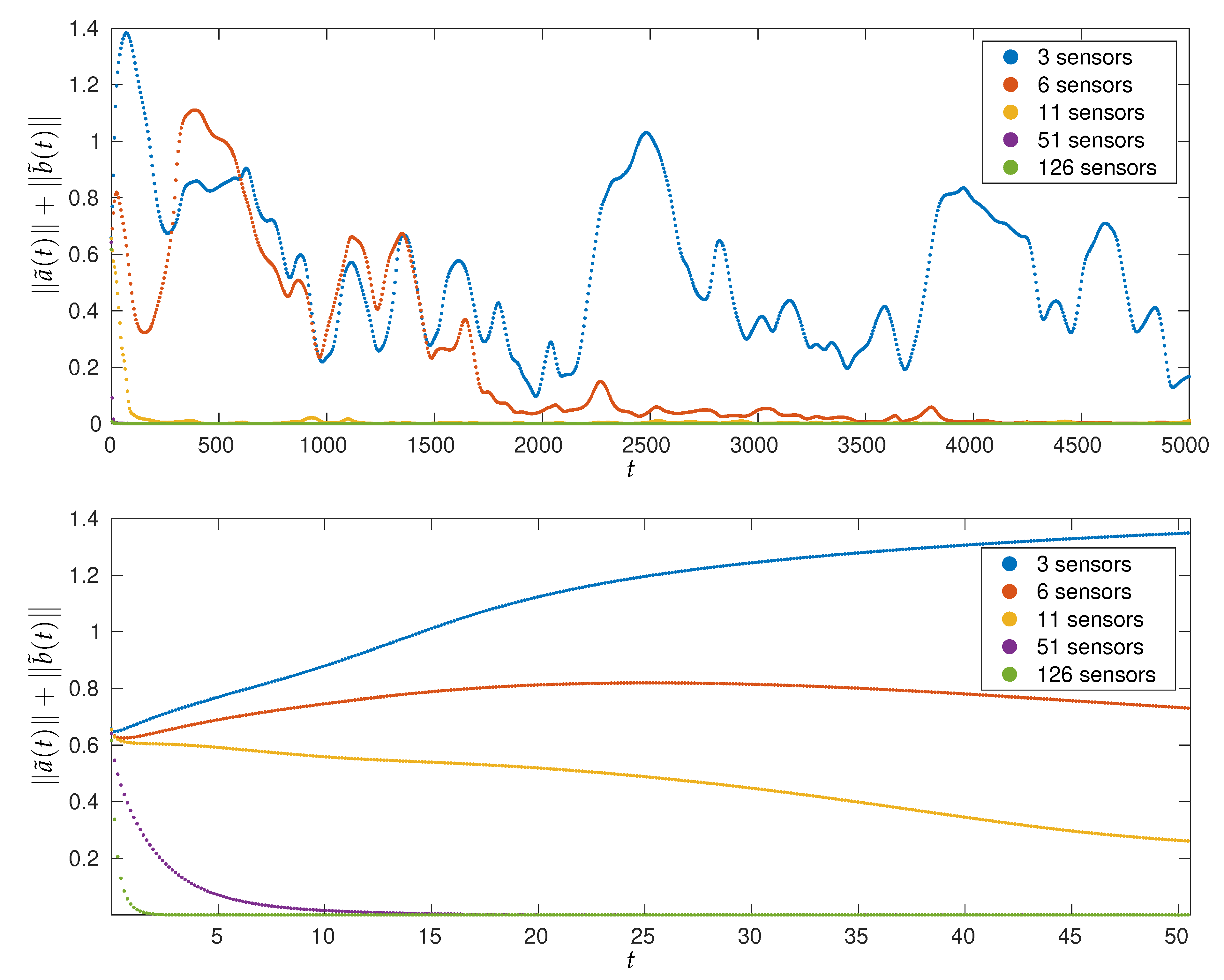
3.2. Example 2 (Non-Stationary Pattern)
4. Conclusions and Outlook
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Gray, P.; Scott, S. Autocatalytic reactions in the isothermal, continuous stirred tank reactor: Oscillations and instabilities in the system A+ 2B→3B; B→C. Chem. Eng. Sci. 1984, 39, 1087–1097. [Google Scholar] [CrossRef]
- McGough, J.S.; Riley, K. Pattern formation in the Gray–Scott model. Nonlinear Anal. Real World Appl. 2004, 5, 105–121. [Google Scholar] [CrossRef]
- Doelman, A.; Kaper, T.J.; Zegeling, P.A. Pattern formation in the one-dimensional Gray-Scott model. Nonlinearity 1997, 10, 523. [Google Scholar] [CrossRef]
- Nishiura, Y.; Ueyama, D. Spatio-temporal chaos for the Gray–Scott model. Phys. D 2001, 150, 137–162. [Google Scholar] [CrossRef]
- Reynolds, W.N.; Pearson, J.E.; Ponce-Dawson, S. Dynamics of self-replicating patterns in reaction diffusion systems. Phys. Rev. Lett. 1994, 72, 2797. [Google Scholar] [CrossRef]
- Kolokolnikov, T.; Wei, J. On ring-like solutions for the Gray–Scott model: Existence, instability and self-replicating rings. Eur. J. Appl. Math. 2005, 16, 201–237. [Google Scholar] [CrossRef] [Green Version]
- Delgado, J.; Hernández-Martínez, L.I.; Pérez-López, J. Global bifurcation map of the homogeneous states in the Gray–Scott model. Int. J. Bifurc. Chaos 2017, 27, 1730024. [Google Scholar] [CrossRef] [Green Version]
- You, Y. Global attractor of the Gray-Scott equations. Commun. Pure Appl. Anal. 2008, 7, 947. [Google Scholar] [CrossRef]
- Morgan, D.S.; Kaper, T.J. Axisymmetric ring solutions of the 2D Gray–Scott model and their destabilization into spots. Phys. D 2004, 192, 33–62. [Google Scholar] [CrossRef] [Green Version]
- Muratov, C.; Osipov, V.V. Static spike autosolitons in the Gray-Scott model. J. Phys. A 2000, 33, 8893. [Google Scholar] [CrossRef]
- Wei, J.; Winter, M. Asymmetric spotty patterns for the Gray–Scott model in ℝ2. Stud. Appl. Math. 2003, 110, 63–102. [Google Scholar] [CrossRef]
- Ouyang, Q.; Swinney, H.L. Transition from a uniform state to hexagonal and striped Turing patterns. Nature 1991, 352, 610–612. [Google Scholar] [CrossRef]
- Pearson, J.E. Complex patterns in a simple system. Science 1993, 261, 189–192. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, W.; Lin, Y.; Yang, F.; Zhang, L.; Tan, Y. Numerical study of pattern formation in an extended Gray–Scott model. Commun. Nonlinear Sci. Numer. Simul. 2011, 16, 2016–2026. [Google Scholar] [CrossRef]
- Vigelius, M.; Meyer, B. Stochastic simulations of pattern formation in excitable media. PLoS ONE 2012, 7, e42508. [Google Scholar] [CrossRef] [Green Version]
- Lee, K.J.; McCormick, W.; Ouyang, Q.; Swinney, H.L. Pattern formation by interacting chemical fronts. Science 1993, 261, 192–194. [Google Scholar] [CrossRef] [Green Version]
- Lee, K.J.; McCormick, W.D.; Pearson, J.E.; Swinney, H.L. Experimental observation of self-replicating spots in a reaction–diffusion system. Nature 1994, 369, 215–218. [Google Scholar] [CrossRef]
- Hankins, S.N.; Fertig, R.S., III. Methodology for optimizing composite design via biological pattern generation mechanisms. Mater. Des. 2021, 197, 109208. [Google Scholar] [CrossRef]
- Vigneresse, J.L.; Truche, L. Modeling ore generation in a magmatic context. Ore Geol. Rev. 2020, 116, 103223. [Google Scholar] [CrossRef]
- Sherratt, J.A.; Mackenzie, J.J. How does tidal flow affect pattern formation in mussel beds? J. Theor. Biol. 2016, 406, 83–92. [Google Scholar] [CrossRef]
- Kyrychko, Y.; Blyuss, K.; Hogan, S.; Schöll, E. Control of spatiotemporal patterns in the Gray–Scott model. Chaos 2009, 19, 043126. [Google Scholar] [CrossRef] [Green Version]
- Xie, W.X.; Cao, S.P.; Cai, L.; Zhang, X.X. Study on Turing Patterns of Gray–Scott Model via Amplitude Equation. Int. J. Bifurc. Chaos 2020, 30, 2050121. [Google Scholar] [CrossRef]
- Zhang, K.; Liu, X.; Xie, W.C. Impulsive Control and Synchronization of Spatiotemporal Chaos in the Gray–Scott Model. In Interdisciplinary Topics in Applied Mathematics, Modeling and Computational Science; Springer: New York, NY, USA, 2015; pp. 549–555. [Google Scholar]
- Zhang, K. Impulsive Control of Dynamical Networks. Ph.D. Thesis, University of Waterloo, Waterloo, ON, Canada, 2017. [Google Scholar]
- Torres, L.; Besancon, G.; Verde, C.; Georges, D. Parameter identification and synchronization of spatio-temporal chaotic systems with a nonlinear observer. IFAC Proc. Vol. 2012, 45, 267–272. [Google Scholar] [CrossRef]
- Torres, L.; Besançon, G.; Verde, C.; Guerrero-Castellanos, J.F. Generalized synchronization of a class of spatiotemporal chaotic systems using nonlinear observers. Int. J. Bifurc. Chaos 2015, 25, 1550149. [Google Scholar] [CrossRef]
- Torres, L.; Besançon, G.; Georges, D.; Verde, C. Exponential nonlinear observer for parametric identification and synchronization of chaotic systems. Math. Comput. Simul. 2012, 82, 836–846. [Google Scholar] [CrossRef]
- Schaum, A.; Alvarez, J.; Meurer, T.; Moreno, J. State-estimation for a class of tubular reactors using a pointwise innovation scheme. J. Process Control 2017, 60, 104–114. [Google Scholar] [CrossRef]
- Schaum, A.; Moreno, J.A.; Alvarez, J.; Meurer, T. A simple observer scheme for a class of 1-D semi-linear parabolic distributed parameter systems. In Proceedings of the 2015 European Control Conference (ECC), Linz, Austria, 15–17 July 2015; pp. 49–54. [Google Scholar]
- Schaum, A.; Alvarez, J.; Meurer, T.; Moreno, J. Pointwise innovation–based state observation of exothermic tubular reactors. IFAC-PapersOnLine 2016, 49, 955–960. [Google Scholar] [CrossRef]
- Schaum, A. An unknown input observer for a class of diffusion-convection-reaction systems. at-Automatisierungstechnik 2018, 66, 548–557. [Google Scholar] [CrossRef]
- Pierre, M. Global existence in reaction-diffusion systems with control of mass: A survey. Milan J. Math. 2010, 78, 417–455. [Google Scholar] [CrossRef]
- Hollis, S.L.; Martin, R.H., Jr.; Pierre, M. Global existence and boundedness in reaction-diffusion systems. SIAM J. Math. Anal. 1987, 18, 744–761. [Google Scholar] [CrossRef]
- Mironchenko, A.; Karafyllis, I.; Krstic, M. Monotonicity methods for input-to-state stability of nonlinear parabolic PDEs with boundary disturbances. SIAM J. Control Optim. 2019, 57, 510–532. [Google Scholar] [CrossRef]
- Delattre, C.; Dochain, D.; Winkin, J. Sturm-Liouville systems are Riesz-spectral systems. Int. J. Appl. Math. Comput. Sci. 2003, 13, 481–484. [Google Scholar]
- Curtain, R.F.; Zwart, H. An Introduction to Infinite-Dimensional Linear Systems Theory; Springer: New York, NY, USA, 1995. [Google Scholar]
- Pazy, A. Semigroups of Linear Operators and Applications to Partial Differential Equations; Springer: New York, NY, USA, 1992. [Google Scholar]
- Franceschini, G.; Bose, S.; Schöll, E. Control of chaotic spatiotemporal spiking by time-delay autosynchronization. Phys. Rev. E 1999, 60, 5426. [Google Scholar] [CrossRef]






Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Feketa, P.; Schaum, A.; Meurer, T. Distributed Parameter State Estimation for the Gray–Scott Reaction-Diffusion Model. Systems 2021, 9, 71. https://doi.org/10.3390/systems9040071
Feketa P, Schaum A, Meurer T. Distributed Parameter State Estimation for the Gray–Scott Reaction-Diffusion Model. Systems. 2021; 9(4):71. https://doi.org/10.3390/systems9040071
Chicago/Turabian StyleFeketa, Petro, Alexander Schaum, and Thomas Meurer. 2021. "Distributed Parameter State Estimation for the Gray–Scott Reaction-Diffusion Model" Systems 9, no. 4: 71. https://doi.org/10.3390/systems9040071
APA StyleFeketa, P., Schaum, A., & Meurer, T. (2021). Distributed Parameter State Estimation for the Gray–Scott Reaction-Diffusion Model. Systems, 9(4), 71. https://doi.org/10.3390/systems9040071