1. Introduction
Although the fault diagnosis of analog electronic circuits has been a heated topic over the past decades, leading to the results reported in numerous publications, some issues in this field remain still open and underdeveloped. Many fault diagnostic methods have been collected and discussed in the references [
1,
2,
3,
4]. Diverse diagnostic subjects have been studied over the last decades, e.g., testability analysis [
5,
6,
7], arranging diagnostic tests [
8,
9], self–testing [
10,
11], and the detection, location, and evaluation of single or multiple faults in linear circuits [
12,
13] and nonlinear circuits [
14,
15,
16], including the circuits designed in sub-micrometer technology [
17,
18,
19,
20]. Some diagnostic algorithms employ various concepts of artificial intelligence [
21,
22,
23,
24,
25] and statistical analysis [
26,
27].
A fault is classified as soft if the circuit parameter deviates from the tolerance range but does not produce any topological changes. Hard or catastrophic faults are shorts and opens. Usually, they cause incorrect the functional behavior of the circuit. A short fault is defined as an unintended connection between two otherwise unconnected points and is often referred to a bridge. In CMOS circuits, shorts are the dominant cause of failures while opens (cutting of the wires) are less probable.
Opens and shorts are extreme cases that occur in electronic circuits. The real open fault can be simulated by a high resistor connected in series with the component or the path and is called a soft open. The real short fault can be simulated by a low resistor connected between a pair of points and is termed a soft short. Such incomplete shorts or opens in circuit connectivity are classified as spot defects. Most physical failures in ICs are local spot defects.
Most of the offered diagnostic methods and techniques in electronic circuits are devoted to the circuits consisting of lumped elements. However, nowadays, distribution circuits play an increasing role in electronic engineering due to the necessity for processing high-speed signals. A distributed parameter multiconductor transmission line encompasses different lines ranging from the power transmission line to microwave circuits [
28]. This paper is focused on very high-frequency electronic circuits, including DPMTL.
The fault diagnosis of power transmission lines is a significant importance problem [
29]. However, most of the research studies in this area have been aimed at finding the location of short faults in three-phase high voltage lines modeled by lumped circuits. Long lines are represented by the circuits with distribution parameters. The fault diagnosis of power transmission lines concentrates on fault location considering specific features of these lines and techniques of their analysis, e.g., the approach based on the positive, negative, and zero sequence networks. The diagnosis is performed from the recorded data employing impedance-based fault location approaches, signal processing techniques, and artificial intelligence methods, e.g., [
30,
31,
32,
33,
34].
This paper is dedicated to the diagnosis of soft short and open faults, which can occur in distributed parameter multiconductor transmission lines (DPMTLs) working at very high frequencies, terminated by the lumped circuits. The statement of the problem is presented in
Section 2. Soft shorts are discussed in detail in
Section 3,
Section 4 and
Section 5 covering identification of the conductor pair where the fault occurs, location of the fault, and estimation of its value. The diagnosis of open faults is limited to detection of the fault and its location as described in
Section 5 and
Section 6. Some discussion and comparisons are included in
Section 7.
Section 8 concludes the paper.
2. Statement of the Problem
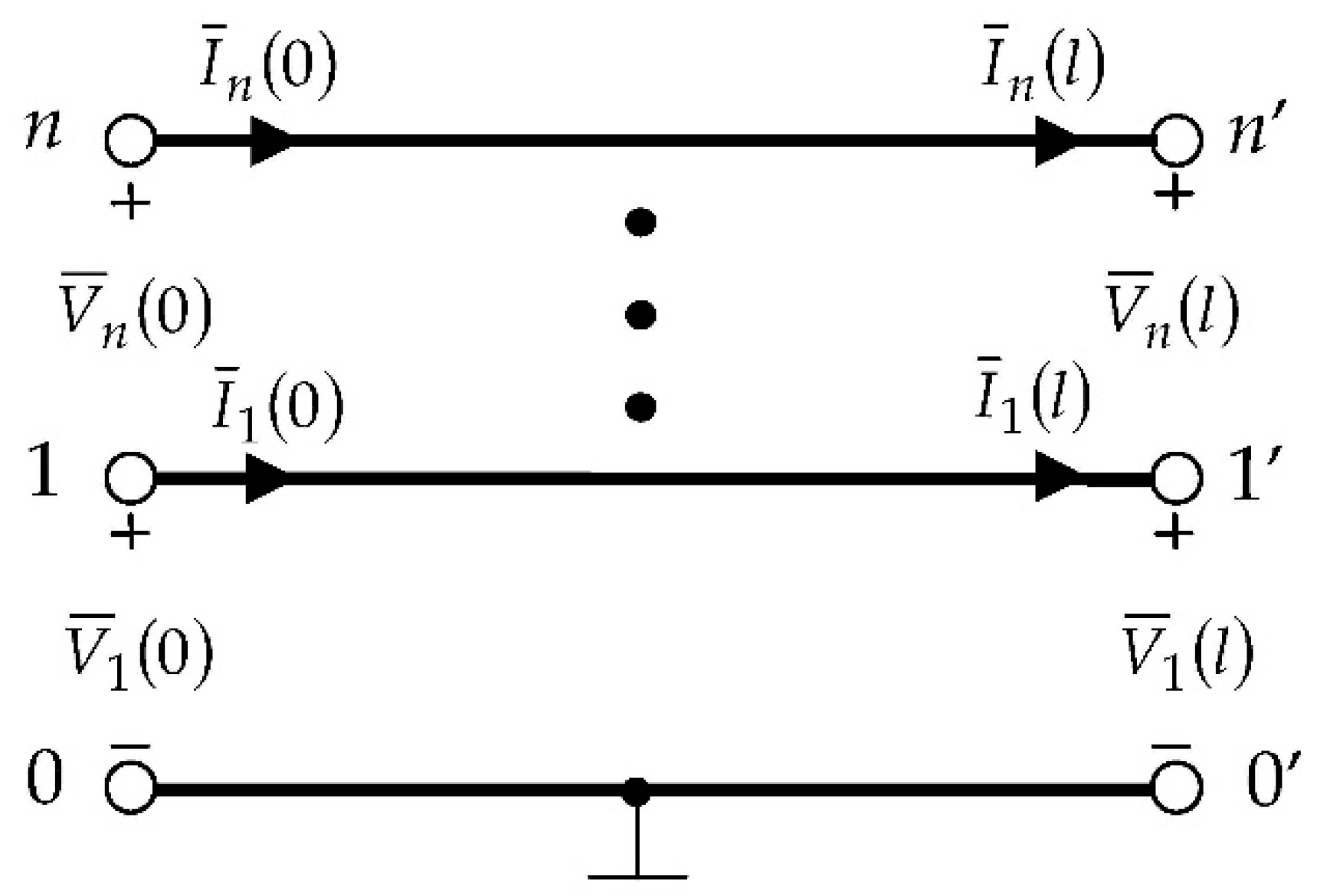
Let us consider a uniform
-conductor transmission line with distribution parameters immersed in a homogenous medium in an AC state at the angular frequency
. The line, having the length
l, is shown in
Figure 1, where
,…,
,
,…,
are the phasors of the voltages and currents at the beginning of the line, whereas
,…,
,
,…,
are the phasors of the voltages and currents at the end of the line. The line is specified by its per–unit–length (p–u–l) parameters
,
where
,
,
. They appear in the resistance, inductance, conductance, and capacitance
matrices
R,
L,
G, and
C. These matrices are components of the impedance and admittance
matrices
,
.
The line can be described by chain equations [
28]:
where
is an
complex modal matrix,
is an
diagonal matrix having complex diagonal elements
,
,
, and
is an
characteristic impedance matrix [
28]. All the matrices can be determined having p–u–l parameters, and they do not depend on the line length
l. Equations (1) and (2) express the voltage and current phasors at the end of a line in terms of the voltage and current phasors at the beginning of the line. The derivation of these equations is presented in detail in reference [
28]. Similarly, we write the equations expressing the voltage and current phasors at the beginning of the line in terms of the voltage and current phasors at the end of the line, as follows,
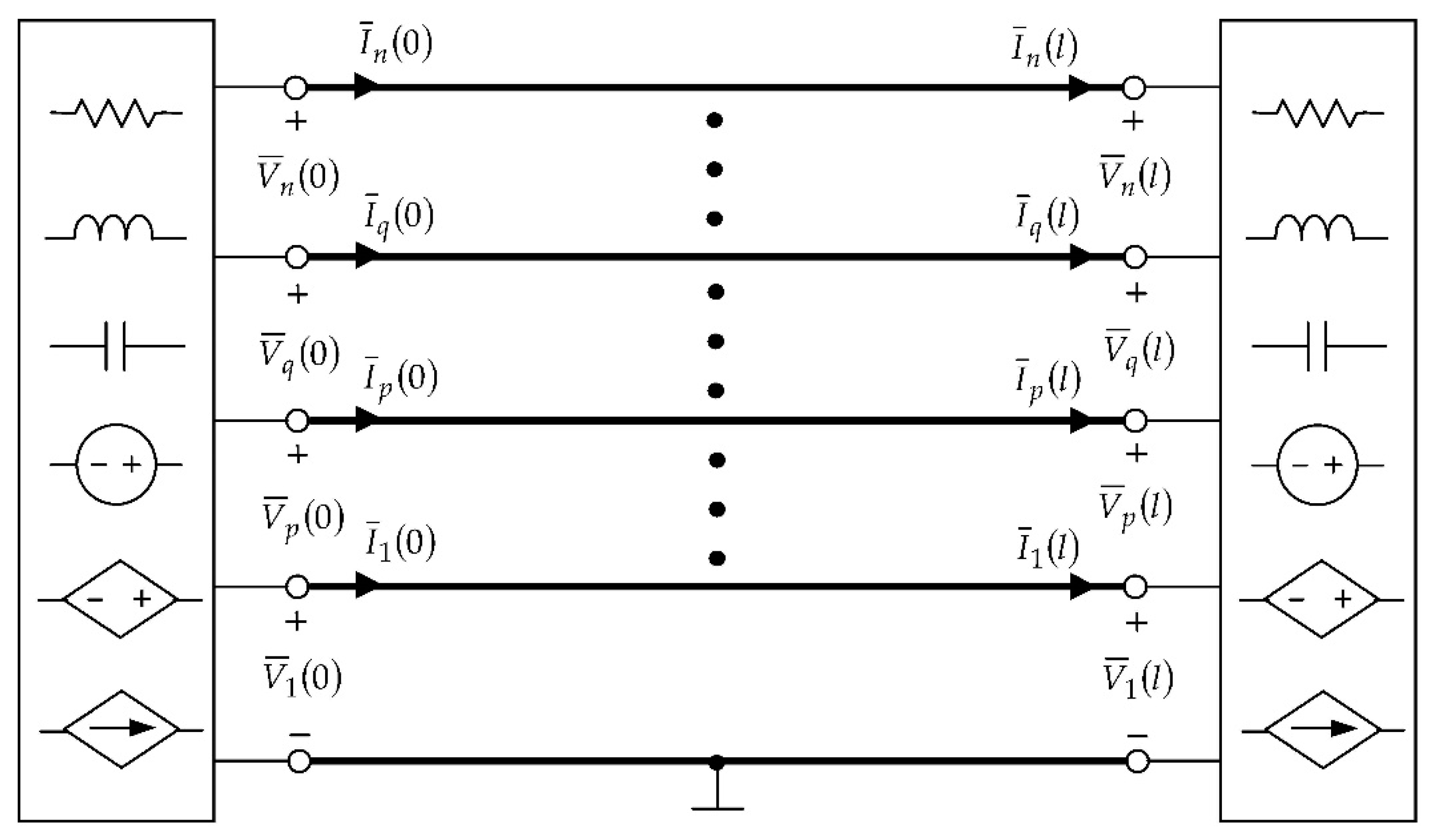
We wish to diagnose a fault in the given distributed parameter
-conductor transmission line terminated at the left and right ends by the lumped circuits, as shown in
Figure 2. The p–u–l parameters and the length
l of the line are known. The soft short can occur between any pair of the
conductors
. It is simulated by a low resistor
, where
,
. The soft open fault can occur along any of the conductors
and is simulated by a high resistor
where
,
. The open fault is represented by resistor
whose resistance tends to infinity.
3. Soft Short Fault Diagnosis
The single soft short diagnosis encompasses the location of the fault by determining the pair of bridged conductors and the distance from the beginning of the line to the point where it takes place and estimating the resistance .
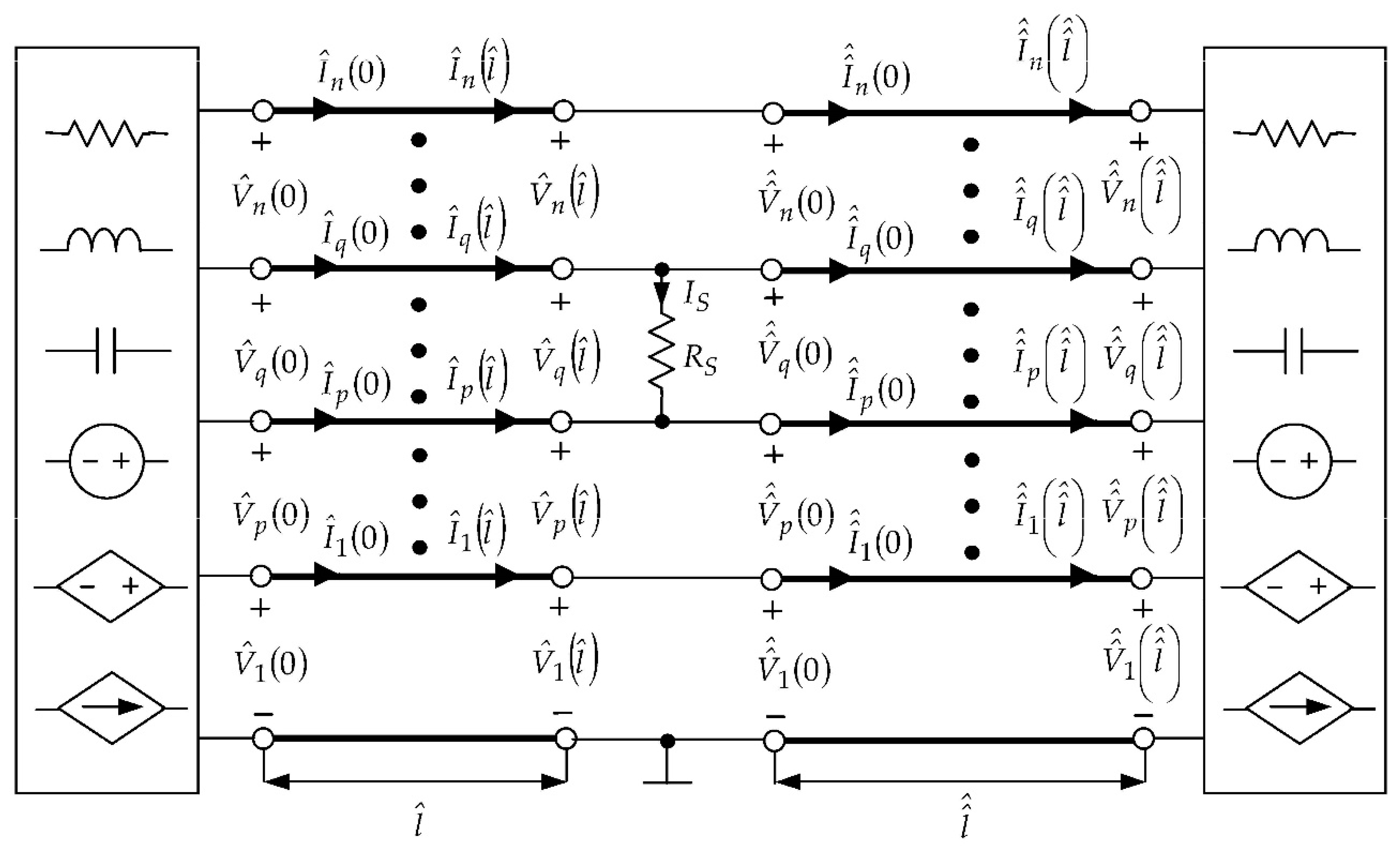
Assume that the soft short occurs between the conductors
p and
q at a distance
from the beginning of the line, where
. To diagnose this fault, we consider the line as a cascade-connection of two lines having the lengths
and
, where
, as demonstrated in
Figure 3. In this figure, the voltage and current phasors relating to the left line are labeled using the hat symbol, while the ones relating to the right line are labeled using the double hat symbol.
The diagnostic method proposed in this paper is based on a measurement test performed in the AC state at the angular frequency . In the course of this test, the voltage phasors at both ends of the line ,…, , ,…, are measured and recorded. These voltages are used to calculate the current phasors ,…, , ,..., by the analyses of the lumped circuits terminating the line.
We adapt Equations (1) and (2) to the left line in
Figure 3
where
are given. Since the p–u–l parameters of the line are known, the matrices
,
, and
can be determined, and the expressions describing the line are functions of
only, which are denoted by
and
.
Equations (3) and (4) adapted to the right line in
Figure 3 are as follows
where
are provided by the measurement test and the analysis of the right termination of the line. Likewise, as in the cases of Equations (5) and (6), the functions on the right sides depend on the length of the line
only. Applying the basic circuit laws in the circuit of
Figure 3, we arrive at the set of
equations
The voltages and currents that appear in Equations (9)–(12) will be replaced by the functions that are defined in Equations (5)–(8). In addition, the length
will be expressed in terms of
,
. Then, the system of
diagnostic equations arises
To simplify notation, the system of Equations (13) and (14) will be presented as
and the system of Equations (15) and (16) will be presented as
Functions are complex and strongly nonlinear. The solution of the set of Equations (17) and (18), and , determines the location of the fault and its value.
Similarly, the soft short between an arbitrary conductor and the reference conductor 0 can be diagnosed.
4. Solving the Diagnostic Equations
The numerical method described in the sequel relates to the diagnostic equations corresponding to the soft short occurring between conductors p and q, where and . The soft short between conductors q and requires obvious slight modification of the method.
4.1. Iterative Method for Solving Systems of Nonlinear Complex Equations
Let us consider the equation
where
is a vector whose elements are real variables, T denotes transposition,
is a function mapping
into
, consisting of
r nonlinear complex functions of
x, where
, and 0 is the zero vector of order
. To solve Equation (19) using an iterative method,
is linearized about
, where
k is the indexof iteration, and the linear equation is solved with respect to
at the
st iteration
where
,
,
where
,
. Thus,
for given
is an
matrix whose elements are complex numbers. Let us present these numbers in rectangular form and rewrite
as
where j is the imaginary unit. Similarly, we write
Using (22) and (23), we rewrite (20) as
where
and
consists of real numbers. Equalizing the real and imaginary parts, we obtain
which can be presented in the form
where
is a real
matrix and
is a real
vector. Thus, Equation (26) represents an overdetermined system of
real equations in
unknown real variables, which are elements of vector
. To solve this overdetermined system, the normal equation method will be used. For this purpose, both sides of Equation (26) are multiplied by the matrix
, leading to the iteration equation
where
Since the order of is , the order of the matrix and the matrix is . Their elements are real numbers. Thus, the right side of (28), as the product of two real matrices of orders and is a real matrix. Similarly, on the right side of (29), there is the product of the matrix and vector giving vector.
Thus, the iteration Equation (27) represents s individual real linear equations in s real unknown variables. If , this equation can be uniquely solved finding at the st iteration. The iteration process is running until and , where and are the convergence tolerances, is the Euclidean norm, and , i.e., .
4.1.1. First Particular Case
If
, vector
x reduces to scalar
x and
. Thus, Equation (19) represents a system of
r equations in one real variable
x. In such case
and matrix
, according to Equation (28), reduces to the real number
where
In addition, vector
defined by Equation (29) becomes the real number
and the iteration Equation (27) reduces to the formula
4.1.2. Second Particular Case
If
and
then
and
according to Equation (28),
is a
real matrix
where
and
, according to Equation (29), is a
real vector
Thus, in this case, the iteration Equation (27) represents a system of two real linear equations in two real unknown variables and .
4.2. Algorithm for Solving the Diagnostic Equations
To solve the system of diagnostic equations consisting of Equations (17) and (18), we consider first the system (17) of
equations with one variable
and apply the iterative method described in
Section 4.1.1. The iteration formula (33) adapted to Equation (17) has the form
We choose as the initial guess. The iteration that meets the convergence tolerances and is denoted by .
Next, Equation (18) is solved, as described in
Section 4.1.2 by substituting
and
starting with
,
. The iteration equation has the form
where
is a
real matrix (see Equation (35)) and
is a real
vector (see Equation (37)). If the convergence tolerances are satisfied at
st iteration
and
, then they constitute the solution of Equation (18) denoted by
,
. Furthermore, if
, then they form the solution of the diagnostic Equations (17) and (18).
If the iterative method does not meet the convergence tolerances in a preset maximum number of iterations , the method fails.
5. Some Remarks
Below, we explain how the diagnosis of the -conductor transmission line is drawn from the proposed method.
5.1. Sketch of the Soft Short Diagnostic Procedure
Perform the diagnostic test and record the measurement data.
Have the p–u–l parameters of the given line determine the matrices , , , , and .
Determine the currents entering and leaving the line by the analysis of the lumped terminations driven by the voltages measured in the course of the diagnostic test.
Identify all pairs of the conductors where the soft shorts can occur. In the -conductor line, the number of them is .
For each of the possible soft shorts, build the model of the faulty circuit as in
Figure 3 and write the set of the diagnostic equations, similarly as Equations (13)–(16), and every time apply the numerical method described in
Section 4. As a rule, the method finds the solution corresponding to the actual fault only and fails in the cases of the other
virtual faults. Occasionally, the method gives also the solutions relating to certain virtual soft shorts that satisfy the diagnostic test. In such case, the diagnostic procedure provides the actual fault and one or more virtual faults. If the method finds a nonrealistic solution, it is discarded. If
does not belong to the range
, it is not classified as a soft short.
5.2. Open Fault Diagnosis
The method dedicated to soft shorts can be directly adapted to the diagnosis of soft open faults, which may occur along any of the conductors
and is simulated by a high resistor
. Numerical experiments carried out in the circuits of
Figure 4,
Figure 5 and
Figure 6, considering different values of
from the range
, reveal that the method correctly identifies the defected conductor and locates the point where the fault occurs (the distance
). Unfortunately, as a rule, it gives a wrong value of
. The method is also able to find the correct value of
if the measurement accuracy while running the diagnostic test is very high. Unfortunately, assurance of such accuracy is impossible in real conditions. Therefore, the method is offered to the diagnosis of open faults rather than soft open faults and is limited to fault detection and location only. In such a case, it is very efficient as illustrated in
Section 6, Example 4.
6. Examples
The method proposed in
Section 3,
Section 4 and
Section 5 was implemented in the MATLAB environment, and the calculations were performed on PC with an Intel Core i7-6700 processor. To show the efficiency of the method, three numerical examples are presented.
6.1. Example 1
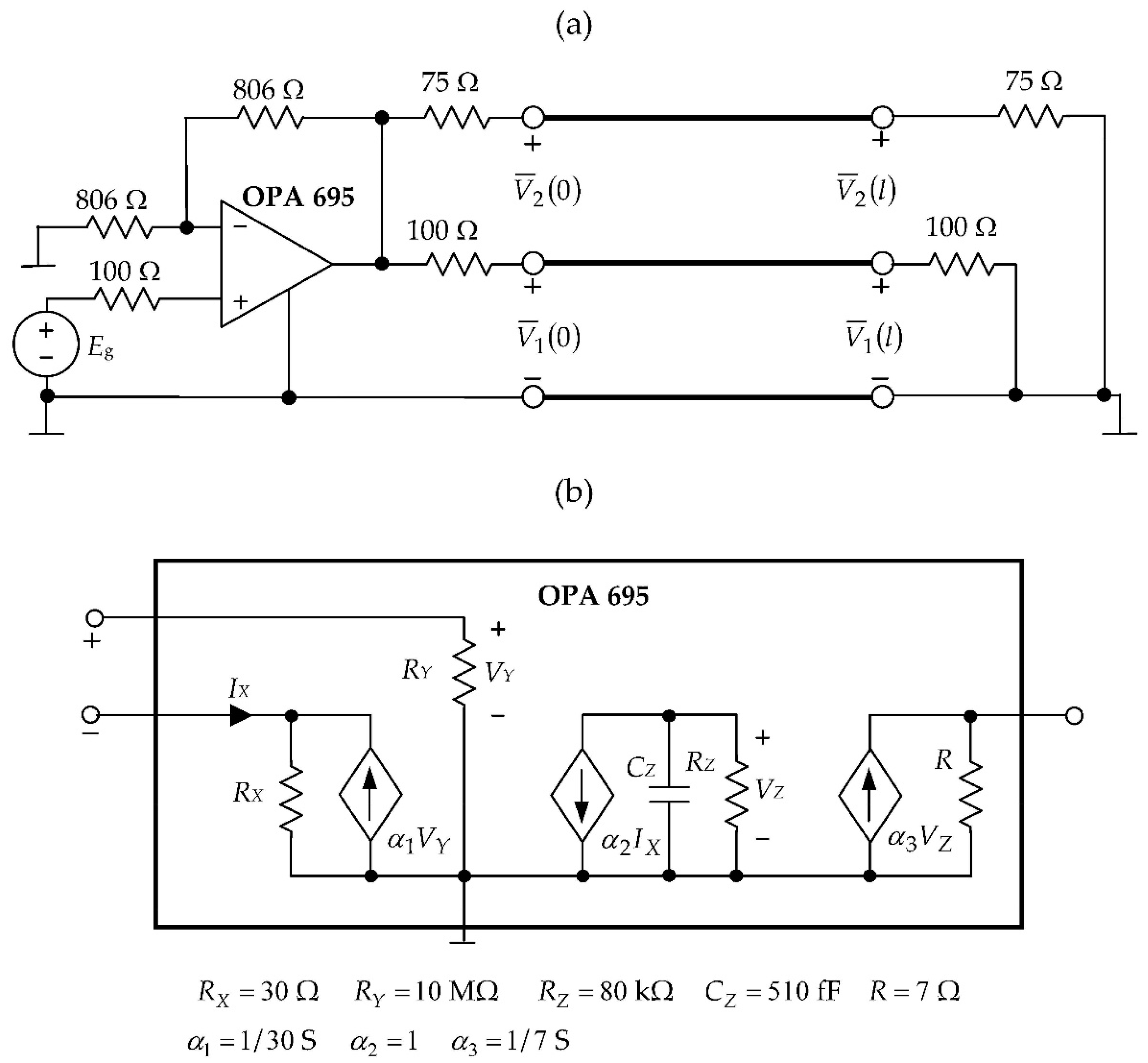
Let us consider the high-performance line driver with distribution amplifier features shown in
Figure 4, including a current feedback operational amplifier, lumped elements, and DPMTL consisting of three conductors. The values of the lumped elements existing in the circuit and the current feedback operational amplifier model are indicated in the figure, whereas the p-u-l parameters of the DPMTL are as follows:
,
,
,
,
,
,
,
,
,
,
, and
. The length of the line is 0.4 m, the amplitude of the power supply voltage source
is 2 V, the phase is
,
= 100 MHz. The accuracy of measurement of the voltage amplitudes is 0.1 mV and of the phases is
. The end values of
are equal to
,
, the convergence tolerances are
,
,
, and the maximum number of iterations
.
To illustrate the proposed method, 24 soft short faults occurring in DPMTL at
and
between different pairs of the conductors, for
, were diagnosed. Statistical results are as follows. In 95.8%, the method correctly locates the fault and estimates its value, in 4.2%, the method finds the correct fault and a virtual fault. Outcomes of the diagnoses of 12 soft short faults are summarized in
Table 1.
For each of the faults 1–9 and 11–12 presented in
Table 1, the diagnostic method finds only the actual fault. The iterative method applied to all other possible faults is not convergent. For fault 10, the method finds the actual fault placed in
Table 1 and the virtual fault occurring between the conductors 0 and 2:
,
.
The CPU time of each diagnosis, including the application of the numerical method described in
Section 4 to all possible faults occurring between each pair of the conductors, does not exceed 0.40 s. For example, the CPU time of the diagnosis of fault 1 in
Table 1 is equal to 0.23 s and that of fault 3 is equal to 0.30 s.
6.2. Example 2
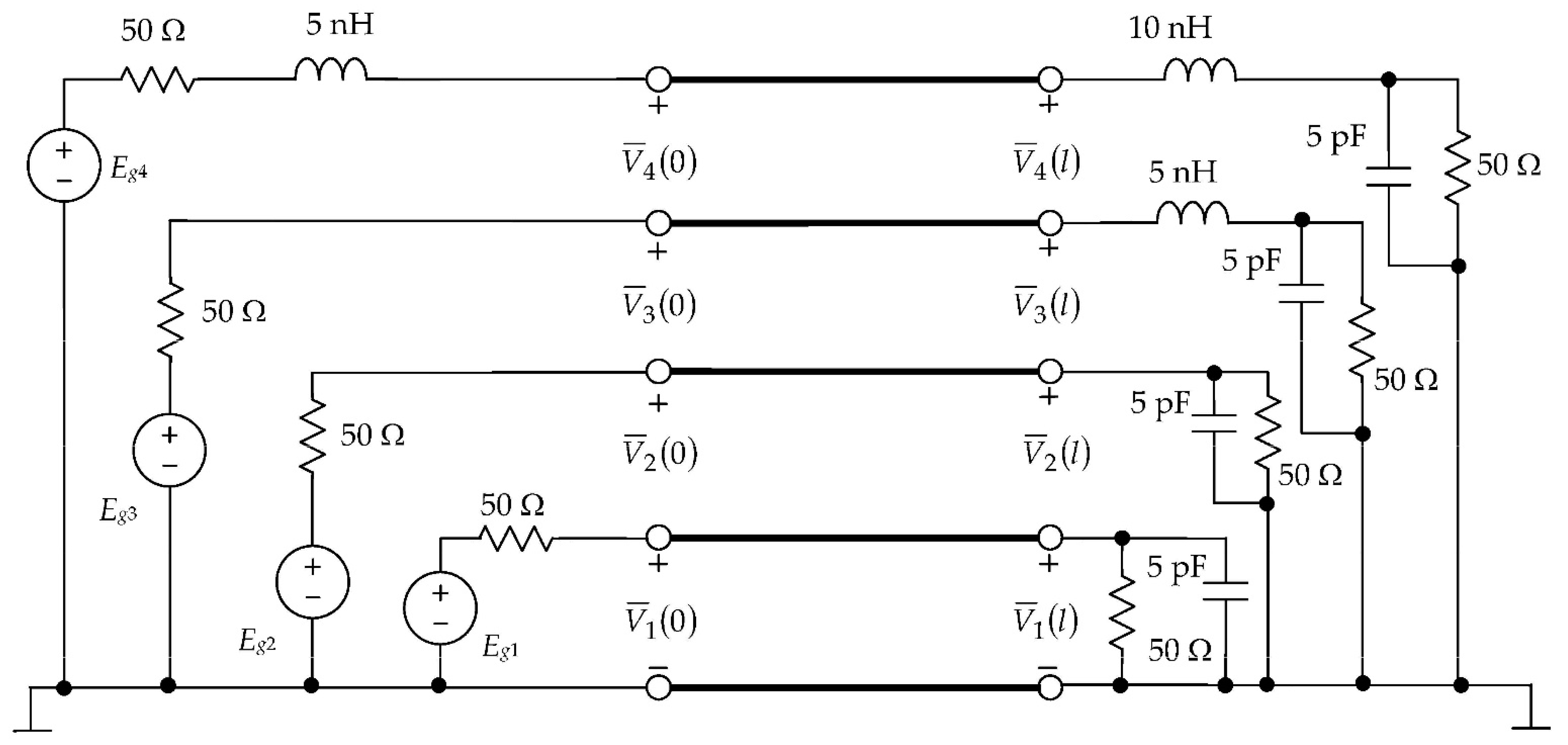
Let us consider the circuit of very high frequency shown in
Figure 5, including a five-conductor transmission line with distribution parameters and lumped elements. The values of the lumped elements are indicated in the figure.
The DPMTL is specified by p-u-l parameters as follows: , , , , , , , , , , , , , , , , , , , , , , , , , , , , , , , and . The length of the line is 0.5 m, the amplitudes of the power supply voltage sources are 5 V, the phases are , and = 100 MHz. The accuracy of measurement of the voltage amplitudes is 0.1 mV and of the phases is . The end values of are equal to , , the convergence tolerances are , , and , and the maximum number of iterations .
To illustrate the method, 20 soft short faults occurring in the DPMTL at
and
between different pairs of the conductors for
were diagnosed. In 15 cases (75%), the method correctly locates the fault and estimates its value; in one case (5%), the method correctly locates the actual fault and estimates its value but finds also a virtual fault; in two cases (10%), the method correctly locates the fault but gives its value inaccurately; in two cases (10%), the method fails. The results of the diagnoses of 10 soft short faults are presented in
Table 2. For faults 1–5, 7, and 9 presented in
Table 2, the method finds only the actual fault and correctly estimates its location and value. For fault 6, the method finds the actual fault, but the estimated value of
differs significantly from the actual one. For fault 8, the method fails. For fault 10, the method finds the actual fault placed in
Table 2 and the virtual fault occurring between the conductors 1 and 2:
,
The CPU time of each diagnosis does not exceed 1.00 s. For example, the CPU time of the diagnosis of fault 1 in
Table 2 is equal to 0.94 s and that of fault 3 is equal to 0.84 s.
6.3. Example 3
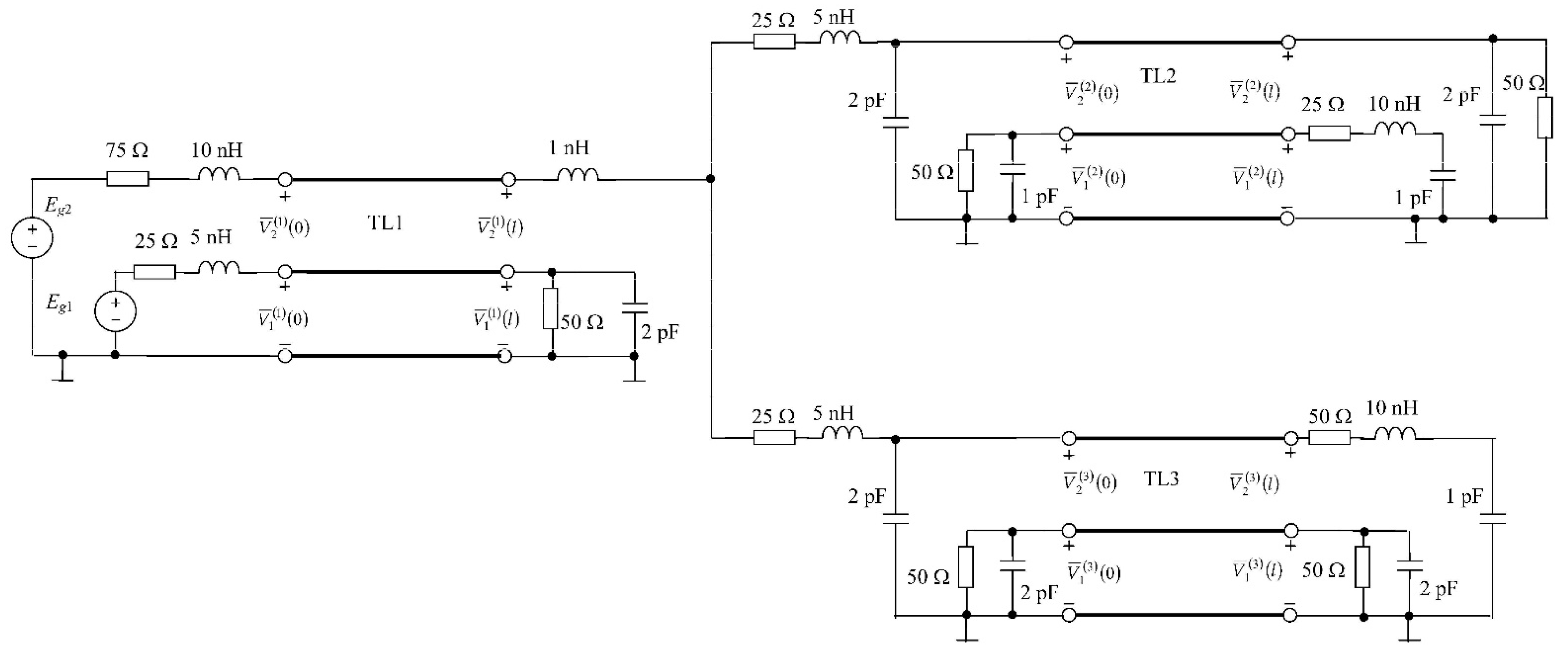
Let us consider the circuit shown in
Figure 6, including three DPMTLs. The values of the lumped elements existing in the circuit are indicated in the figure, whereas the p-u-l parameters of the DPMTLs are the same as in Example 1. The length of the lines are as follows: 0.5 m, 0.4 m, and 0.6 m, the amplitudes of the power supply voltage sources are
Eg1 = 5 V and
Eg2 = 10 V, and the phases are equal to
,
= 100 MHz. The accuracy of measurement of the voltage amplitudes is 0.1 mV and of the phases is
. The end values of
are equal to
,
, the convergence tolerances are
,
, and
, and the maximum number of iterations
.
To illustrate the proposed method, 12 soft short faults occurring in the DPMTLs, presented in
Table 3, were diagnosed. For each of faults 1–10, the diagnostic method finds only the actual fault. For fault 11, the method finds the actual fault placed in
Table 3 and the virtual one, occurring between the conductors 0 and 2 in TL2:
. In addition, for fault 12, the method gives the actual fault and the virtual one, which occurs between the conductors 0 and 2 in TL3:
,
. The CPU time of each diagnosis including the application of the numerical method described in
Section 4 to all possible faults occurring between any pair of the conductors in all the three lines does not exceed 0.55 s.
6.4. Example 4
To illustrate the effectiveness of the method adapted to open fault diagnosis, we consider the circuits of
Figure 4,
Figure 5 and
Figure 6 again. Diagnoses of 45 open faults were carried out numerically: 10 in the circuit of
Figure 4, 17 in the circuit of
Figure 5, and 18 in the circuit shown in
Figure 6 with the same measurement accuracy and convergence tolerances as in Examples 1–3. In all the cases, the method correctly identified the faulty conductor and estimated the fault location
. The CPU time in each case including the diagnoses of possible faults in
n conductors of all the lines was less than 0.2 s in the circuit of
Figure 4, 0.4 s in the circuit of
Figure 5, and 0.3 s in the circuit of
Figure 6. Outcomes of the diagnoses of 20 open faults are presented in
Table 4 and
Table 5.
7. Discussion and Comparisons
This paper deals with very high-frequency electronic circuits, including multiconductor distributed parameter transmission lines and is aimed at the diagnosis of soft short and open faults in the lines. According to our knowledge, this is the first work in that area. However, short fault location and classification in power transmission lines is a significant importance problem that has been a subject of interest to engineers and researchers over the last decades. Therefore, we compare, in the sequel, the diagnostic method proposed in this paper and the methods and techniques for the fault diagnosis of power systems.
In electronic circuits, the transmission line is supplied with a single or several sources of very high frequency, but they do not form a three-phase system as in power transmission lines. As a rule, the circuits include active elements that are modeled using different types of controlled sources and passive elements. In consequence, the standard node method may not hold, which makes it impossible to obtain the impedance matrix [
29,
32] having the required properties, which is the basis of many fault location methods in power transmission lines.
In multiconductor lines, all kind of couplings play an important role, and none of the p–u–l parameters can be neglected. The proposed method covers all aspects of the short diagnosis: identification of the pair of the conductors where the fault occurs, location of the fault, and estimation of its value. It is also able to detect and locate an open fault. The fault diagnosis of power transmission lines concentrates on the location and classification of shorts, e.g., [
29,
30,
31,
32,
33,
34].
The method presented in this paper constitutes a basis for the fault diagnosis of some class of nonlinear electronic circuits containing multiconductor transmission lines, using the small-signal models of the circuits at the operating point.
Unlike the very high frequency, low voltage electronic circuits, the power systems are the low frequency, high voltage ones. The main diagnostic problem in a power transmission line is the location of short faults. The typical power system includes a three-phase transmission line to deliver power from a power plant to end users. The power systems also include transformers, current transformers, protection relays, and some measurement instruments. In consequence, the diagnostic methods can use phasor data of voltages and currents, e.g., [
33,
34], whereas in the electronic circuits, the measurement of currents is inconvenient, and the data are limited to voltages. The theory of power circuits is well established, and there are many methods for their analysis, including the methods of finding the impedance matrix commonly used in the fault diagnosis [
29]. Impedance-based methods belong to the class of major short fault location methods. In addition, some techniques, such as Clarke and Karrenbauer transformations, enabling decoupling three-phase quantities into other components, are applied to fault detection and location [
30]. Most of the works devoted to the short fault diagnosis of power transmission lines relate to the lines modeled by lumped elements. In some works, three-phase distributed parameter transmission lines are represented by three one-phase models using the positive, negative, and zero sequence networks, which considerably simplifies the diagnosis. The fault diagnosis of power transmission lines mainly concentrates on short faults, because they occur much more frequently than the open faults.
Thus, the methods for fault diagnosis of power systems exploit and take advantage of specific properties of this class of circuits and peculiar methods of their analysis. Although there are some features in common, they use the research tools that are not applicable to the fault diagnosis of the electronic circuits.
8. Conclusions
The paper is focused on the diagnosis of soft short and open faults that can occur in a DPMTL terminated by lumped electronic circuits of very high frequency. The method devoted to soft short faults is described in detail. It encompasses all aspects of the diagnosis: identification of the pair of the conductors where the fault occurs, location of the fault, and estimation of its value. The idea of the method can be directly adapted to the soft open fault diagnosis. Unfortunately, unlike the soft short fault case, estimation of the faulty resistor value is possible only if measurement accuracy, while running the diagnostic test, is very high and cannot be assured in real circumstances. However, when the method is applied to open instead of soft open, then it efficiently identifies the conductor where the fault takes place and locates it along this conductor.
The numerical method for solving nonlinear diagnostic equations takes advantage of the particular form of these equations. It is easy to implement, efficient, and very fast. In consequence, the time consumed by the diagnostic method is short, and the method does not require great computing power. Voltage phasors considered in the course of the diagnostic test are measured at one frequency only. The faults are searched taking into account all possible places where they can occur. Drawbacks of the proposed method are as follows. The method is limited to the diagnosis of a single fault. Sometimes, it finds the actual fault and a virtual one, both having equal rights. Occasionally, the method fails.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}