4. Materials and Methods
The main idea of the developed methodology for studying complex nonlinear elastic body oscillations is presented below on the example of the elastic body–CFHM system, which moves along a body with a constant velocity . The elastic body under the action of external factors performs complex vibrations, known as bending and longitudinal vibrations. Partial information about one of the forms of vibrations, in this case longitudinal, which is known from experimental studies, is considered in experimental studies based on the processing of information obtained by the use of sensors. Regarding these specified data, the amplitude of these oscillations is much smaller than the bending. Despite this fact, the following vibrations under certain conditions can lead to a significant increase in the amplitude of another form of bending vibrations of the body and thus reduce the service life. The task is to:
- (a)
develop methods for processing experimental information about longitudinal vibrations and bringing them to a form convenient for consideration when building a mathematical model of bending vibrations;
- (b)
construct a mathematical model of the dynamics of the elastic body–CFHM system, which would take into account the above a priori information and a wide range of internal and external factors of continuous and discrete action;
- (c)
develop methods for constructing the solution of the above mathematical model;
- (d)
obtain analytical relations that describe the defining parameters of bending vibrations of an elastic body depending on external and internal factors of the system on the basis of the above method. That would enable calculations of specific elements of machines or systems at the design stage or during their operation.
Methods of processing experimental information about one of the forms of vibrations and bringing it to a form convenient for building a mathematical model of another form of vibrations. The peculiarity of the elastic body dynamics is the fact that its material satisfies the quasilinear elastic properties, and therefore the frequency of the dynamic process of such an elastic body depends on the amplitude. It is proposed to use a priori information about the amplitude and period of longitudinal vibrations of an elastic body to establish this relationship with respect to longitudinal vibrations [
14]. Thus, it is believed that it is determined by a set of successive values of amplitudes and periods of vibrations. These characteristics of the longitudinal vibrations of a rigid body determine the following approximate ratios:
in which
,
,
—length of
-scope,
-magnitude.
Logarithms of amplitude change
and period
of vibrations with a sufficient degree of accuracy can be approximated by polynomials
In the above dependences,
and
polynomials have the form of
It should be highlighted that in relations (3) and (4), , is a constant, which is expressed in terms of physical and mechanical properties of the elastic body, the method of its fixation and for the quasilinear properties of the latter is zero, a small parameter indicating a slow change and time of amplitude and period of vibrations.
From the expressions for the logarithms of the change in the amplitude and period of vibrations on the basis of the mean theorem we obtain
where
is phase of the longitudinal component of vibrations.
Regarding the obtained expressions to the characteristics of the vibrating process at a given time, we obtain
where
,
are known functions.
According to the above, the longitudinal movement of the cross section of the elastic body with the coordinate y for the first approximation can be represented as (l is length of the elastic body and the parameters , are determined by the method of fixing the body, its physical and mechanical properties and cross-sectional shape).
Mathematical model of elastic body dynamics. As it follows from the formulation of the problem to be solved in the work, an arbitrary conditionally-isolated element of an elastic body, as well as SPOS, are in complex motion. To describe the kinematic parameters of CFHM, portable motion is considered to be the motion of an elastic body. The movement of the continuous flow of homogeneous medium is relative to the body and will be nothing more than a relative motion. As for the elastic body, which performs complex vibrations, bending and longitudinal ones, the first of them will be considered portable, then the longitudinal deformation of the thallus relative to the transversely deformed elastic body determines the relative motion. Assuming that in the undeformed position of the body its neutral axis occupies a position that coincides with the vertical axis OY, provided that the bending vibrations of the body occur in one plane (XOY plane), the portable transverse displacement of the elastic body is uniquely determined by the movement perpendicular to OY. Thus, the transverse vibrations are described by the function—the transverse movement of the neutral axis of the body with the coordinate at any time t; the relative displacement of the elastic body (longitudinal vibrations) is unambiguously described by the displacement of the specified cross section of the body along the deformed elastic axis. The specified value is determined, as mentioned above, by the function .
A mathematical model of the dynamics of the elastic body system—continuous flow of CFHM can be obtained based on the “dynamic equilibrium” of the conditionally selected element with the coordinate of its middle y and length dy.
In the case when the elastic body continuous flow of homogeneous medium performs one-form vibrations (bending) at hinged ends, its mathematical model has the following form [
11]:
in which
is the distance between the attachment points of the elastic body,
is accordingly the mass of the unit length of the elastic body and CFHM,
is its bending stiffness (
–E-modulus, moment of inertia of the body cross-section),
is a function that describes the resistance forces, the nonlinear component of the reducing force, the external
-periodic
perturbation with frequency
(
) and other forces whose maximum value is significantly less than the maximum value of the last term of the left side, as indicated by the small parameter
.
As for the considered much more complex case, the mathematical model should additionally take into account the inertial forces of relative motion and the Coriolis force of an element of an elastic body and CFHM. In accordance with the above-accepted components of the movements of the system under consideration, the relative (
) and the Coriolis (
) acceleration of a point that coincides with the middle of an element of an elastic body (a point with a coordinate
) is determined by the dependences
where
,
,
unit vectors are directed along the axes OX, OY, and OZ (the OZ axis is directed perpendicular to the XOY plane); and
is the angle that is formed by the tangent to the curved axis of the elastic body with the OY axis at the point with the coordinate
. For small vibrations of the system (such vibrations are considered in this paper), the condition for determining the specified angle is the correlation
, and therefore in accordance with the specified
is nothing more than the angular velocity of the transpositional motion of elastic body. As for the acceleration of CFHM, for its movement we have the following: the relative acceleration is equal to
, where
is the unit vector of the internal normal to the curved axis of an elastic body, and that is why
,
-radius of curvature of the neutral axis of the body at a point with an ordinate
. Projections of the specified vector on the axis of the fixed system XOYZ are determined in accordance with the correlation
Similarly, the Coriolis acceleration vector continuous flow of homogeneous medium is determined by
in which
is the vector of angular velocity of an elastic body in relative motion.
Taken together, the above allows us to write down the differential equation of bending vibrations of an elastic body, taking into account longitudinal vibrations and motion along CFHM in the form of
Note 1:
(a) Equation (15) takes into account that for the case of small vibrations, it is true that , and the deplanation of flat sections is neglected;
(b) longitudinal vibrations do not change the curvature of the neutral axis of the elastic body;
(c) the differential relation of the “dynamic equilibrium” of the selected element in the projection on the OY axis can, together with Equation (15), serve as a basis for determining the dynamic response of anchorages.
Methodology for studying nonlinear bending vibrations of an elastic body, non-resonant case. As noted above, the main idea of the methodology is based on the use of a priori information for longitudinal vibrations, so the function
and its partial derivatives are determined in accordance with the relation obtained on its basis
. Restrictions on the CFHM and magnitude of the amplitude of longitudinal vibrations allow us to represent differential Equation (15) in the form
where
expresses the effect on the bending vibrations of the longitudinal and movements of the CFHM.
It is obvious that the maximum value of the right-hand side of the obtained Equation (16) is a small value compared to the maximum value of the term
. This is the basis for applying general ideas for constructing solutions to quasilinear equations with a small right-hand side [
15,
16,
17,
18] for the boundary value problem (16) and (10). Its peculiarity is that its right part is
-periodic according to two arguments,
(takes into account the influence of information known on the basis of experimental information, the influence of longitudinal vibrations on bending ones) and
(takes into account the influence of external perturbation). The solution of Equation (17), more precisely its first approximation in the
-form of “dynamic equilibrium”, is presented in the form
in which
, and
is an unknown
-periodic function by arguments
, which takes into account the influence of external and internal factors on changing the vibrations. As for the law of changes in its parameters
and
, their value significantly depends on the correlation between the frequency of natural bending vibrations
on the one hand and the frequency of the external periodic perturbation
or longitudinal vibrations
on the other hand. In the case when the correlations are justified,
тa and
(
are coprime numbers and this case will be called non-resonant) for bending vibrations of the function
and
in the asymptotic representation (18) are related by ordinary differential equations
The right-hand sides of relations (19), more precisely unknown functions
and
, must be defined so that the asymptotic representation (18), taking into account (19), satisfies the original Equation (17) with the considered accuracy. For an unambiguous definition of the functions
and
on
, we impose an additional condition—it does not contain the first mods in the argument scenario. This is equivalent to the following relation:
In the physical interpretation, this condition is equivalent to the choice of the s mode amplitude for the bending vibrations amplitude. To find the indeterminate functions
and
, which describe the laws of variation of the basic parameters of bending vibrations of an elastic body by differentiating the asymptotic representation of the solution taking into account the relations (19), we obtain
Thus, we obtain the differential equation for the connection between the indeterminate functions
and
and
for the first mode of vibrations (
).
where
corresponds to the value
if the function
in it and its derivatives is determined according to the main part in representation (5). As for the function
, it, in accordance with the agreed notation, takes approximate values for the considered value as follows. It allows one to obtain the relations to determine the required functions
From the form of the function
, it can be seen that
The obtained relation allows us to draw the following conclusion: for the first non-resonance approximation, the longitudinal vibrations of the elastic body do not affect the law of change of the single-frequency bending vibrations amplitude. As for the CFHM, it follows from the specified properties of the system that describe the shape of the defected axis of the elastic body, the frequency and amplitude of vibrations. Taken into consideration all the above, the system of differential equations for the first non-resonance approximation (25) can be transformed into
For the case when the material of the elastic body satisfies the nonlinear technical law of elasticity [
6], and the resistance force is proportional to the speed in the degree
, the right part of Equation (19) takes the form for the case of the main mode of vibrations
According to the relations (19), taking into account (28) in
Figure 1, the laws of change of the natural bending vibrations frequency from the amplitude and speed of the CFHM relative motion (
Figure 1a) and the CFHM bulk mass and the length of the elastic element (
Figure 1b) at the constant speed of the CFHM relative motion at such parameters of the system
are presented for different values of the CFHM bulk mass.
Thus, the influence of nonlinear elastic characteristics of the elastic body material and the motion of a continuous flow of medium along it is manifested as a function of its natural frequency of vibrations on the amplitude and speed of the latter. In particular, the natural frequency of nonlinear vibrations of an elastic body:
- –
for larger values of the relative flow rate of the continuous medium is less;
- –
decreases with increase of elastic body length;
- –
is smaller for a continuous flow of medium of smaller specific gravity.
The above facts play a significant role in the study of resonance vibrations of the system of elastic body–CFHM continuous flow. These vibrations are the subject of further research.
Methods for studying nonlinear bending vibrations of an elastic body, resonance case. Resonance vibrations almost always play a negative role for mechanical systems, because during resonance they significantly increase the amplitude of vibrations, which means that dynamical loads increase. This reduces the service life of the systems. The peculiarity of the resonance vibrations of the considered elastic body is the fact that they can be caused not only by external forces but also by longitudinal vibrations; in addition, they are affected by the CFHM motion.
In order to find their influence on the resonance values of the amplitude, as in the non-resonance case, we will look for the solution of the problem in the asymptotic representation (18) with the difference that in the resonance case, the pipe vibration’s amplitude significantly depends on the phase difference of natural and forced vibrations. First of all, consider the internal resonance. As noted above, it occurs due to longitudinal vibrations, the main parameters of which are known from the processing of experimental studies, and they can be interpreted as external (in relation to bending) action. The phenomenon of resonance in nonlinear systems depends significantly on the phase difference of their natural and coercive forces. For this purpose, we introduce the specified parameter according to the relation
, and therefore in the asymptotic representation (18), the amplitude parameter is determined by a more complex relation, namely
Here and below, the index in the amplitude of the main mode of vibrations is omitted for simplicity. The indeterminate functions
are located in such a way that the asymptotic representation (18), taking into account (28), satisfies the original equation with the considered degree of accuracy. To do this, by differentiating (18), taking into account the above, we have
The obtained relations allow us to write a differential equation, which connects the required functions in the form
An indeterminate function will satisfy homogeneous boundary conditions if it can be represented as a series
In this case, the functions
and their derivatives are connected by a relation
Relation (33) is the basis for determining the right-hand members of differential Equation (29), which describe the change in the basic parameters of bending vibrations of an elastic body in the resonant zone. Indeed, if
is
periodically with an argument
, and does not contain in the splitting of its first modes of the splitting, then the coefficients of its splitting for the specified mode of the function
have the same properties. Thus, we obtain a system of equations from relation (33).
where
The system of differential Equation (34) allows us to represent equation of the first approximation of resonance vibrations caused by the CFHM motion and longitudinal vibrations in the form
here
Differential equations describe the change in the amplitude of transverse vibrations of an elastic body during the transition through resonance at the main frequency of longitudinal vibrations at different speeds of motion of CFHM, provided that the nonlinear elastic properties of the body material satisfy the nonlinear technical law of elasticity, and the resistance force is proportional to the speed of portable motion in the power of
:
where
is the amplitude of the main internal resonant vibrations.
As for the subresonances that occur when the condition is met
, they are described by dependencies.
where
.
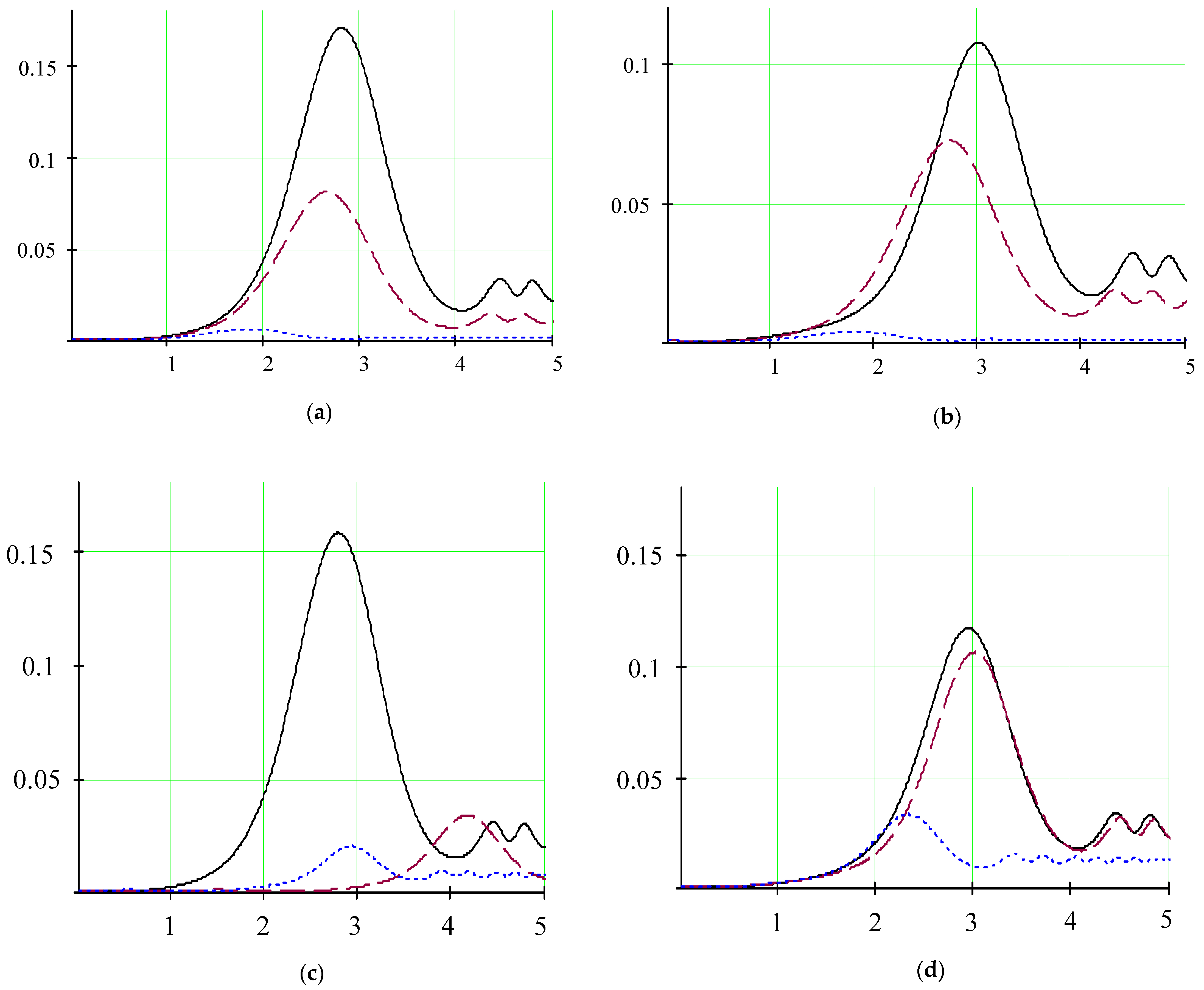
In
Figure 2 is presented, in accordance with relations (34), the change in the amplitude of bending vibrations caused by longitudinal vibrations for the case when the material of elastic body satisfies the nonlinear technical law of elasticity, and the resistance force is proportional to the velocity for
for different values of the relative amount of motion.
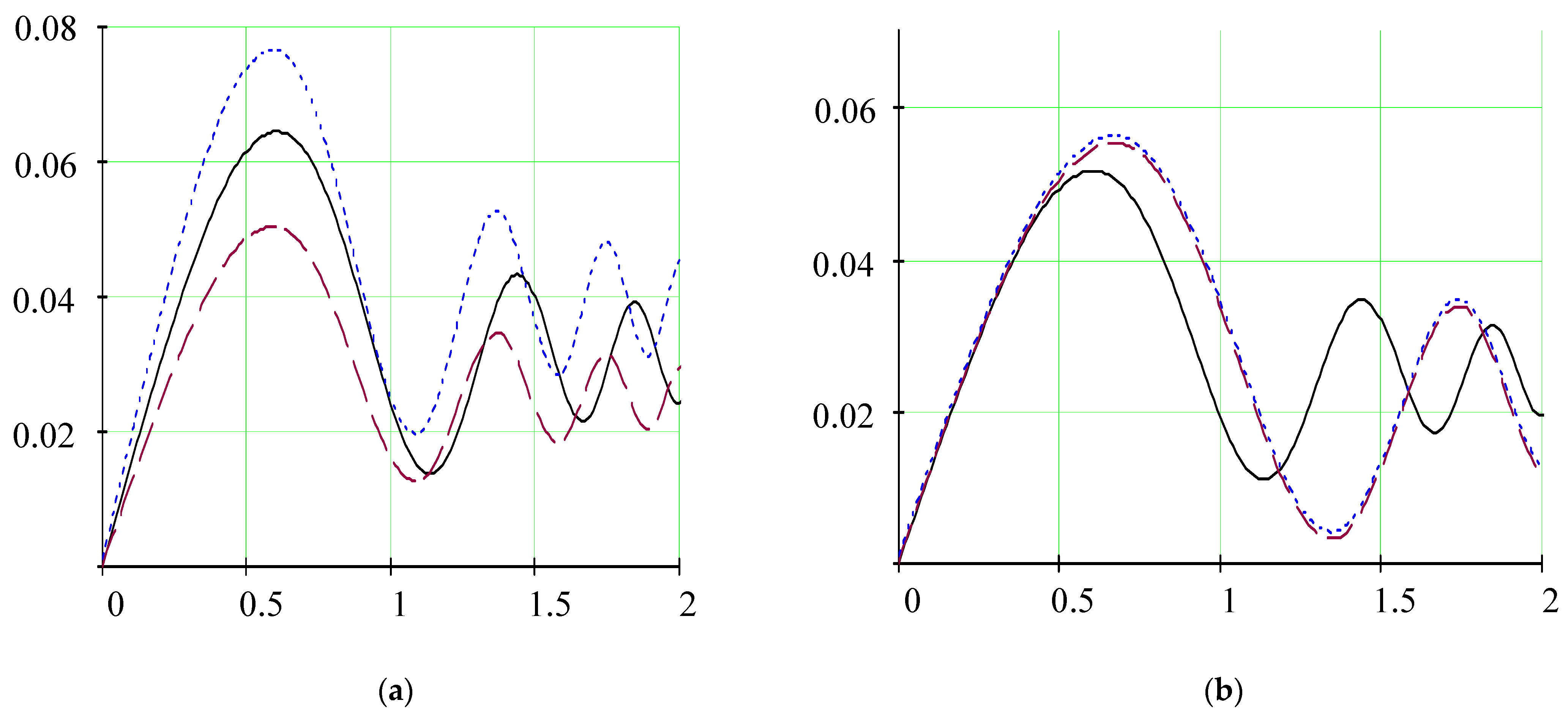
In
Figure 3a, a change in the amplitude of bending vibrations caused by longitudinal vibrations at different values of amplitudes can be observed, while in
Figure 3b is shown the motion of CFHM at different values of the speed of its movement.
By analyzing the analytical dependences obtained above, it is established that internal resonances for an elastic body that performs bending and longitudinal vibrations can exist on even and odd modes of bending vibrations, and on even modes they are caused by longitudinal vibrations, and on odd modes by the motion CFHM. As for the quantitative characteristics of the internal resonance, the given graphical dependences show that the amplitude of the transition through the internal resonance is less:
- –
at higher frequencies of longitudinal vibrations than at the main one;
- –
for large values of the relative amount of motion CFHM;
- –
with a faster transition through resonance.
The above represented results have a practical component; in order to reduce dynamic loads in an elastic body that performs longitudinal and bending vibrations and along which a continuous stream motion of CFHM, it is necessary to move the latter at the highest technologically possible speed. At the same time, a special case mentioned above, , is the result concerning resonant bending vibrations caused only by longitudinal vibrations. They, as follows from relations (34), exist only on paired modes of bending vibrations.
The main idea of studying internal resonant phenomena in the elastic body–CFHM system described above has been transferred to the study of external resonant phenomena. Below, we give only the basic relations concerning the continuous action of an external periodic perturbation, and the case of a discrete periodic (pulsed) action on the system under consideration is considered in more detail, because it requires some additional mathematical calculations.
Therefore, the condition for the main external resonance under the continuous action of an external perturbation is
The relations that describe the resonant process at the main frequency of natural vibrations take the form
where
is the relations that describe the resonant process at the main frequency of natural vibrations that take the form of the phase difference between natural and external forced vibrations, i.e.,
, so functions
and
describe the laws of change in the resonant parameters of the system under study using relations similar to (29), with the only difference that the resonant process is considered at the frequency of external perturbation.
In the specific case considered for non-resonant vibrations under the condition of external periodic perturbation, the system of Equation (35) is transformed to the form
where
is the value of the external sinusoidal periodic perturbation.
The differential dependences obtained above also allow us to obtain relations for determining the amplitude of stationary resonant vibrations
By simple transformations from dependencies (37), we obtain a resonant curve that describes the dependence of the amplitude of stationary resonant vibrations on the unbalance of the frequencies of natural and forced vibrations and the parameters of the system
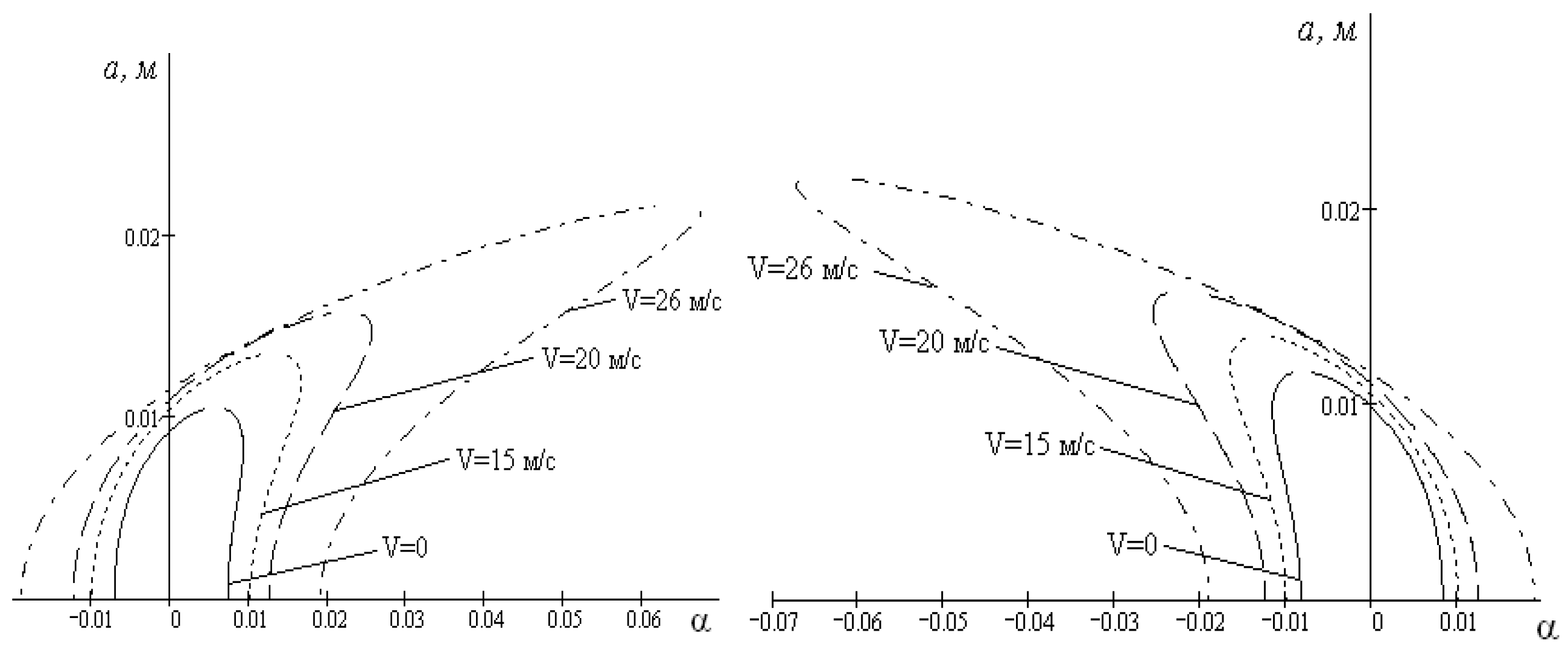
Based on ratio (38),
Figure 4 presents the dependencies of the amplitude of resonant stationary vibrations of an elastic body on the unbalance
of the frequencies of natural and forced vibrations at different speeds of motion of CFHM.
It follows from the above that when the sign of the nonlinear component of the reducing force changes, the slope of the resonant curves changes. Comparing the graphical dependencies for different models of the resistance force, it can be argued that an increase in the degree of its nonlinearity leads to a decrease in the resonant value of the vibration amplitude and a narrowing of the resonant zone.
As for the unknown function
, and for non-resonant or resonant cases, it partially affects only the change in the shape of bending vibrations and can be found without much difficulty by decomposing into multiple Fourier series, followed by equating the coefficients in the right and left parts of the relations that follow from (24) and (25), for the non-resonant case, and (31) and (36) for the resonant one. The case of pulsed (discrete) action of an external disturbance is much more important and at the same time much more difficult to develop a research methodology. Below, we consider the case when the specified perturbation acts only at a fixed point of the elastic body and is repeated at regular intervals. As for the limitations concerning the specified external perturbation of the vibrations, the elastic body–continuous flow of CFHM, as for continuous periodic perturbation, the maximum value of the pulse perturbation is small compared to the maximum value of the reduced transverse force. Thus, the differential equation of the bending component of the elastic oscillations takes the following form:
in which
is the coordinate of the elastic body in which the periodic impulse force acts with the period
, and
is a function of the corresponding argument. Regarding the following forms,
and
, we can consider them to be analytical. The form
takes into account the effect of longitudinal oscillations and CFHM on bending.
From the properties of delta functions [
19,
20,
21], it follows that the maximum values of the periodic action of pulsed perturbation at time points
are equal
. To generalize the above method of studying the effect of longitudinal vibrations and dynamics of CFHM on bending, primarily on the basis of the properties of completeness and orthonormal system of functions that describe the forms of natural bending vibrations of an elastic body, delta function from a linear variable
will be as follows:
, in which the modulus
is as follows
. As for the time component of the pulse perturbation, the most interesting case of the considered drilling is the case when the perturbation has a period close to the period of its own bending oscillations. Hence, in the form presented below we will consider
pulsed perturbations causing resonant bending vibrations. In this case, the temporal component of its action can be precisely represented [
20] in the following form:
,
. For simplicity, it is assumed that the first impulse action coincides with the initial moment of motion. Thus, the conducted partial sampling allows to present the initial mathematical model in a simpler form:
Note that the procedures performed with delta functions do not violate the accuracy of the obtained mathematical model in the form of relation (40) compared to the original (differential Equation (39)); in addition, to operate with the right part of the latter equation is much easier than the original. The use of the developed methodology for the study of resonant oscillations due to external periodic action for the boundary value problem (40), (10) allows the relationship of the main resonance to be represented as follows:
The system of differential equations is the basis for the study in the general case of the influence of impulse perturbation on the bending vibrations of the system continuous flow of CFHM. It is greatly simplified in the case where the impulse perturbation is constant, i.e.,
. For this case, the basic equations for the main resonance in the case when the elastic properties of the body are described by the nonlinear technical law of elasticity, and the force of resistance is proportional to the velocity to the degree they take the form
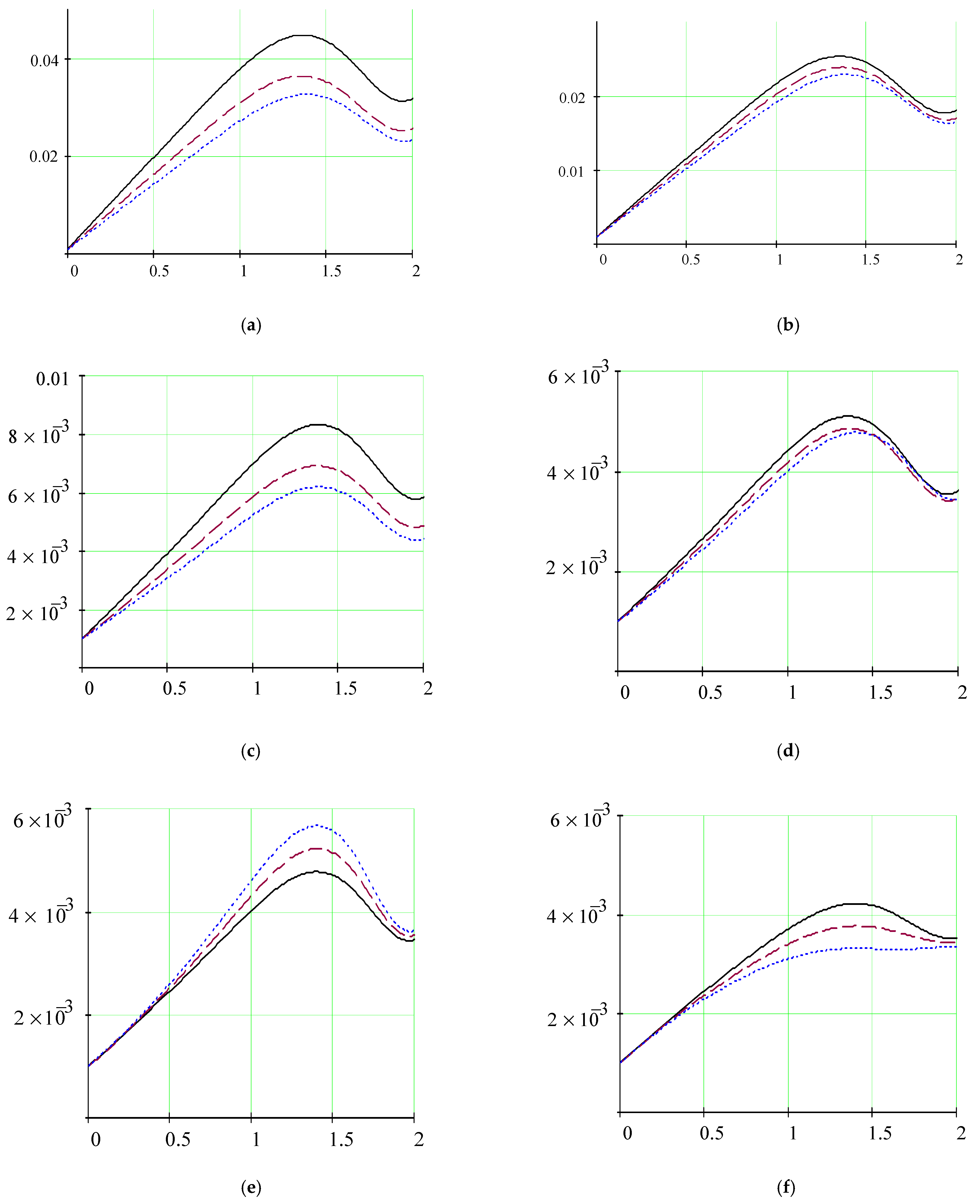
For the first resonant approximation, the system of differential Equation (42) describes the main parameters of resonant vibrations under the action of external periodic pulse perturbation by the following dependence:
According to the above dependence,
Figure 5 shows the change in the amplitude of bending vibrations during the transition through resonance at different lengths of the elastic body, the quantities of the relative motion of the CFHM, and the points of application of impulse perturbation.
The presented graphical dependencies show the amplitude of the passage through the main resonance of the bending vibrations of the elastic body, which is due to the periodic pulse action. It becomes more important in the case when the point of application of this action is closer to the middle of the elastic body. As for the continuous flow of a homogeneous medium, for larger values of the relative amount of motion, it not only reduces the natural frequency of the elastic body but also slightly reduces the maximum value of the amplitudes of the system through the resonance.
The above results can be generalized without much difficulty in the case of the action of impulse perturbation at several points of an elastic body.

 ,
, 


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




