
Application of Nonlinear Adaptive Control in Temperature of Chinese Solar Greenhouses


Abstract
:1. Introduction
- (1)
- (2)
- The control process is severely influenced by instable factors including global radiation, external weather, and human activities;
- (3)
- The crops and the environment have a strong and interactive relationship [15]. For example, the plants transpiration and photosynthesis similarly affect the greenhouse temperature that they depend on.
- (1)
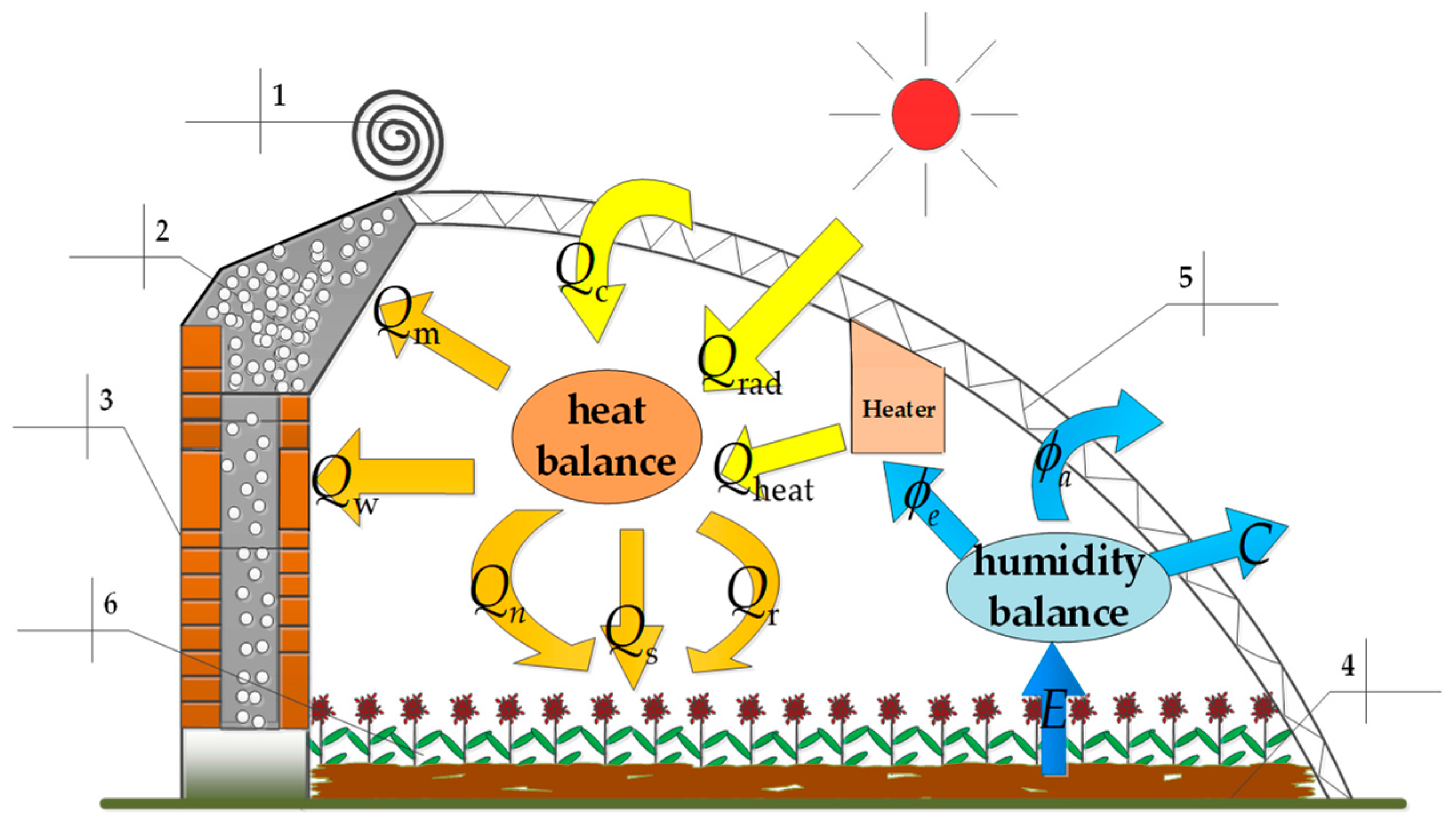
- In order to make the dynamic model more accurate and closer to the actual system, heat transfer quantities of the north wall and north roof were respectively added to the dynamic model in this paper. In addition, the cold air penetration was added to the humidity balance model;
- (2)
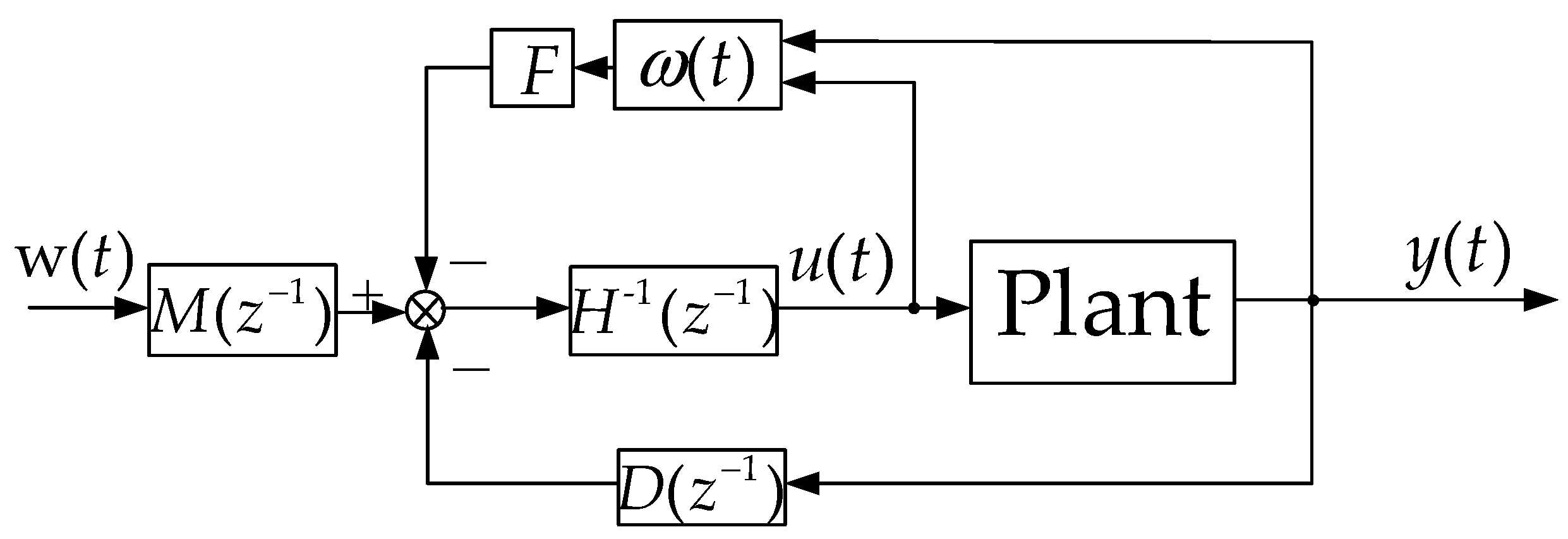
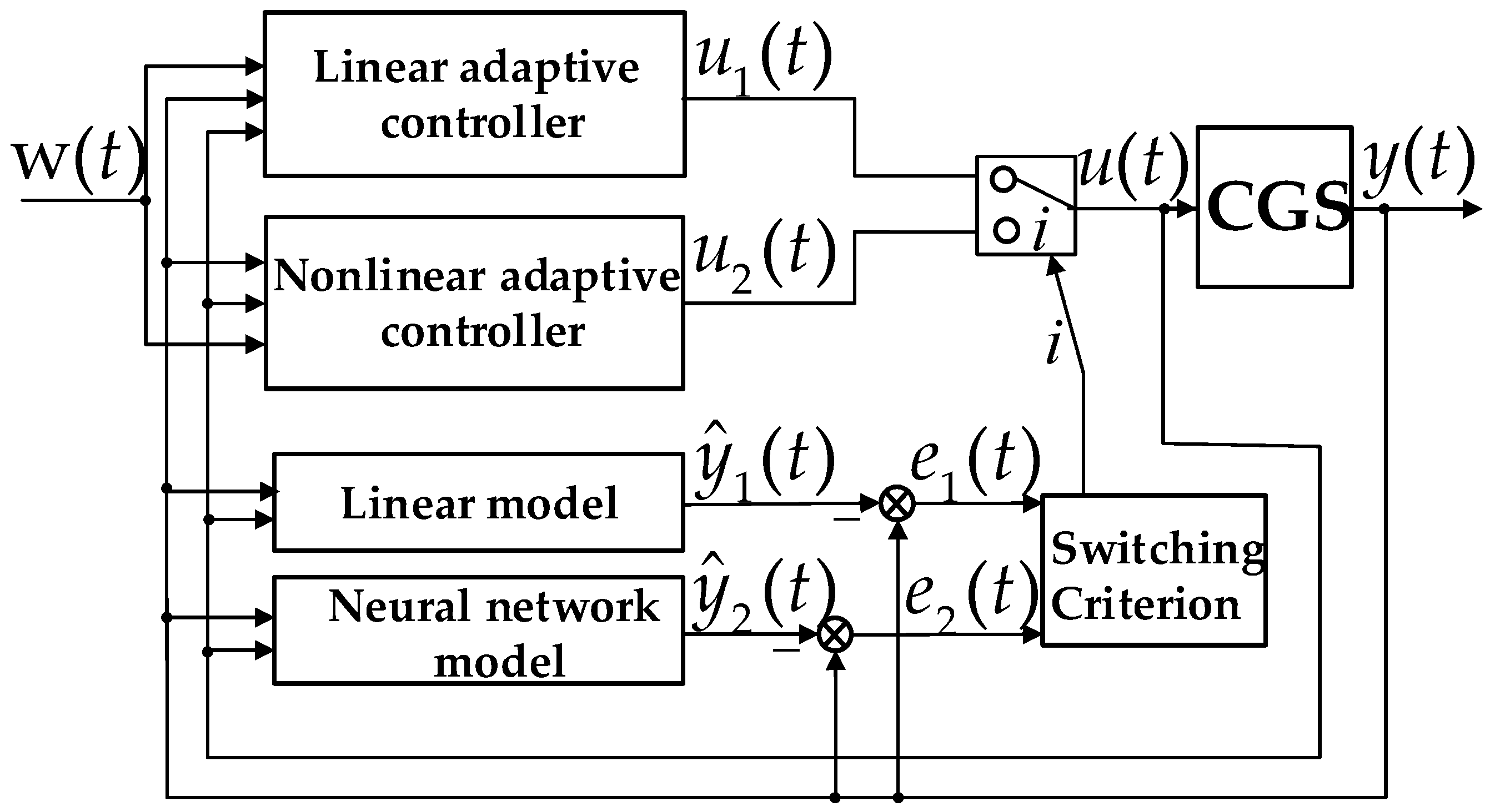
- To the best of our knowledge, almost no research so far has addressed the fact that the existing control scheme based on RBF has been applied to the CSG considering the nonlinearity and adaptiveness. This control approach takes advantage of the strong ability of learning and adaptability of RBF neural networks. In this paper, a linear adaptive controller, a neural network nonlinear adaptive controller, and switching mechanism were combined to improve dynamic performance on the promise of guaranteeing system stability. The parameters of the controller were determined based on the generalized minimum variance control law. An RBF neural network was employed to solve the unmodeled dynamics of CSGs. The experimental results express that the presented control strategy shows quick set-point tracking ability in the case of multi-disturbances and can achieve satisfactory control performances.
2. Materials and Methods
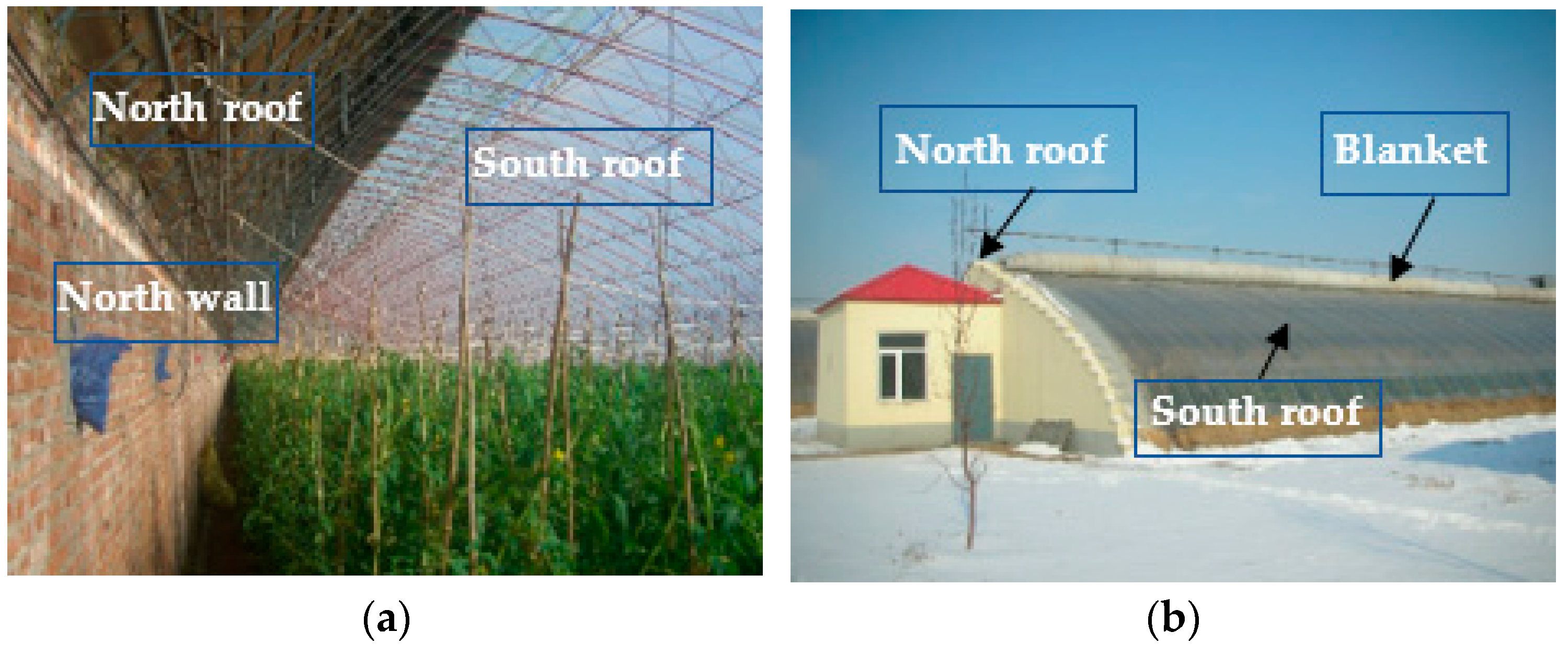
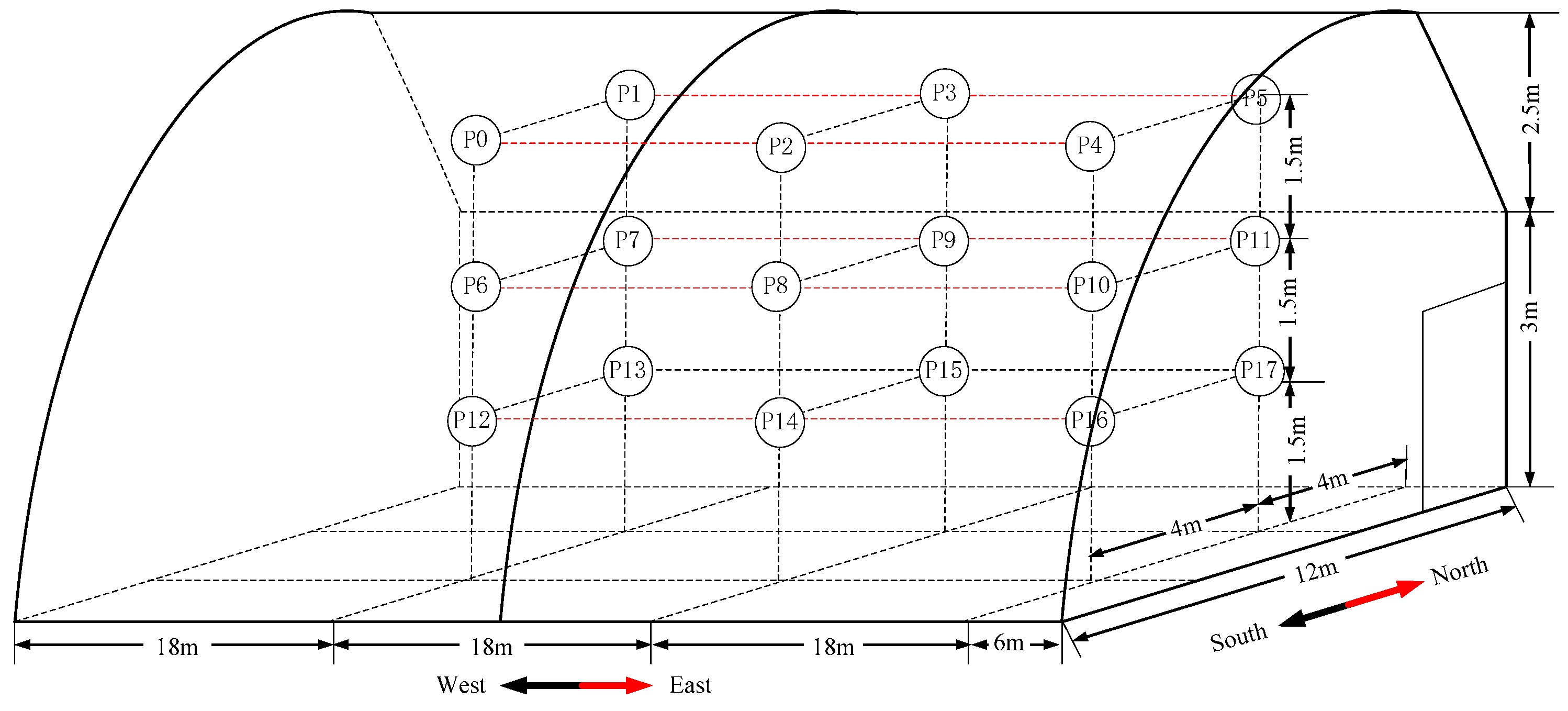
2.1. CSG Facility
2.2. Greenhouse Model Description
3. Nonlinear Adaptive Control Based on Switching Mechanism
3.1. Controller Design Model
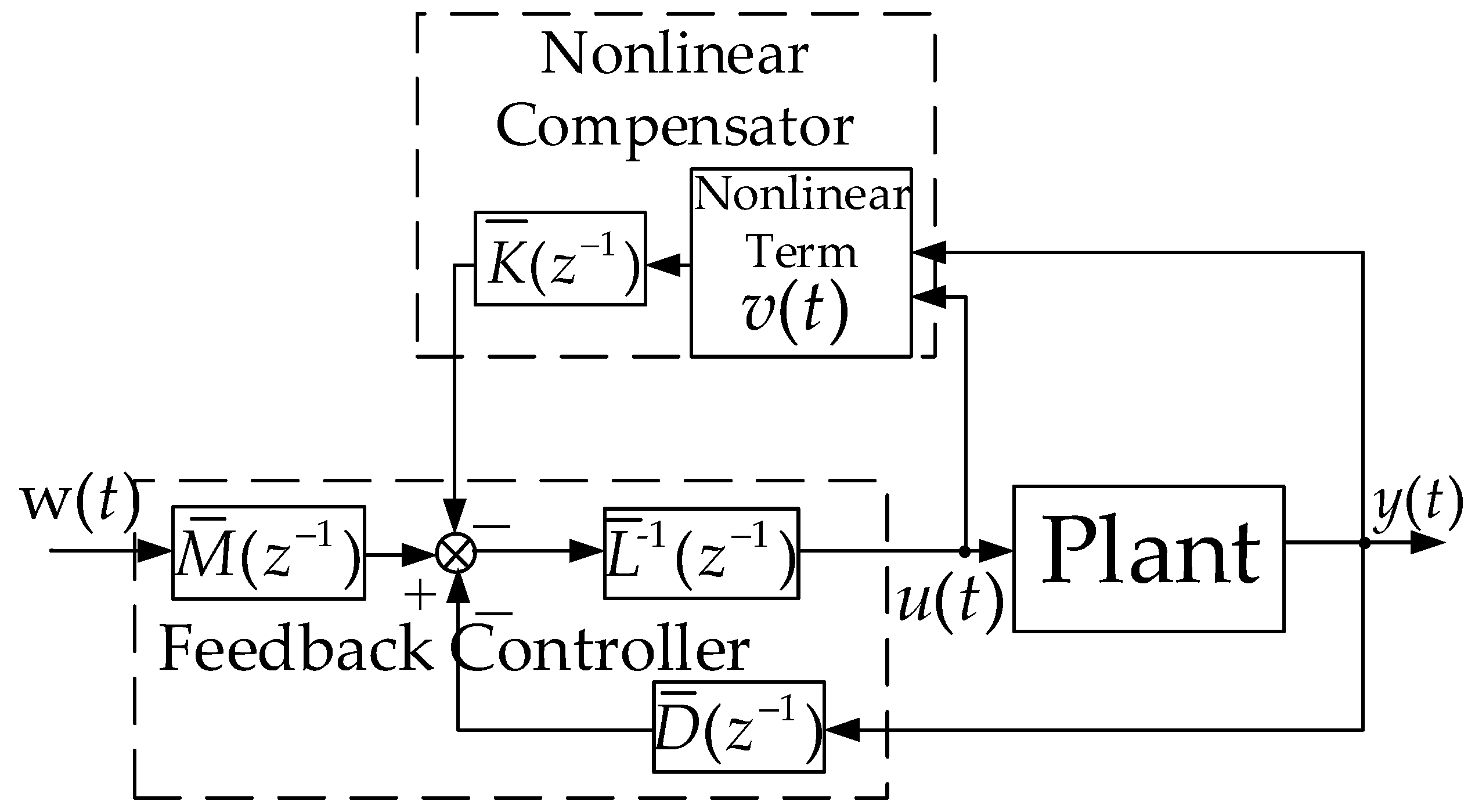
3.2. Nonlinear Controller
3.3. Parameters Selection
3.4. Adaptive Switching Control
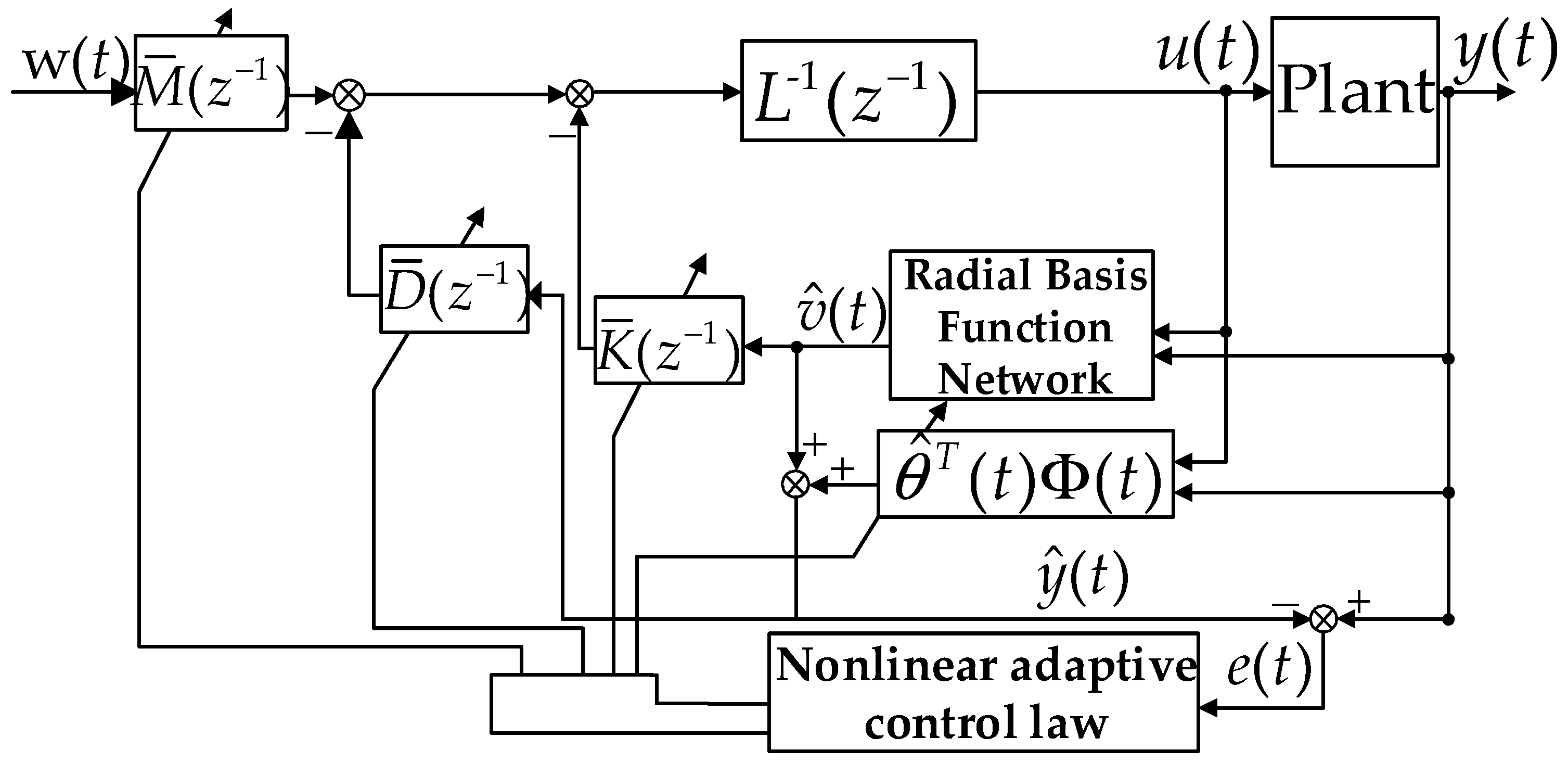
3.5. RBF Neural Network for Unmodeled Dynamics
4. Results
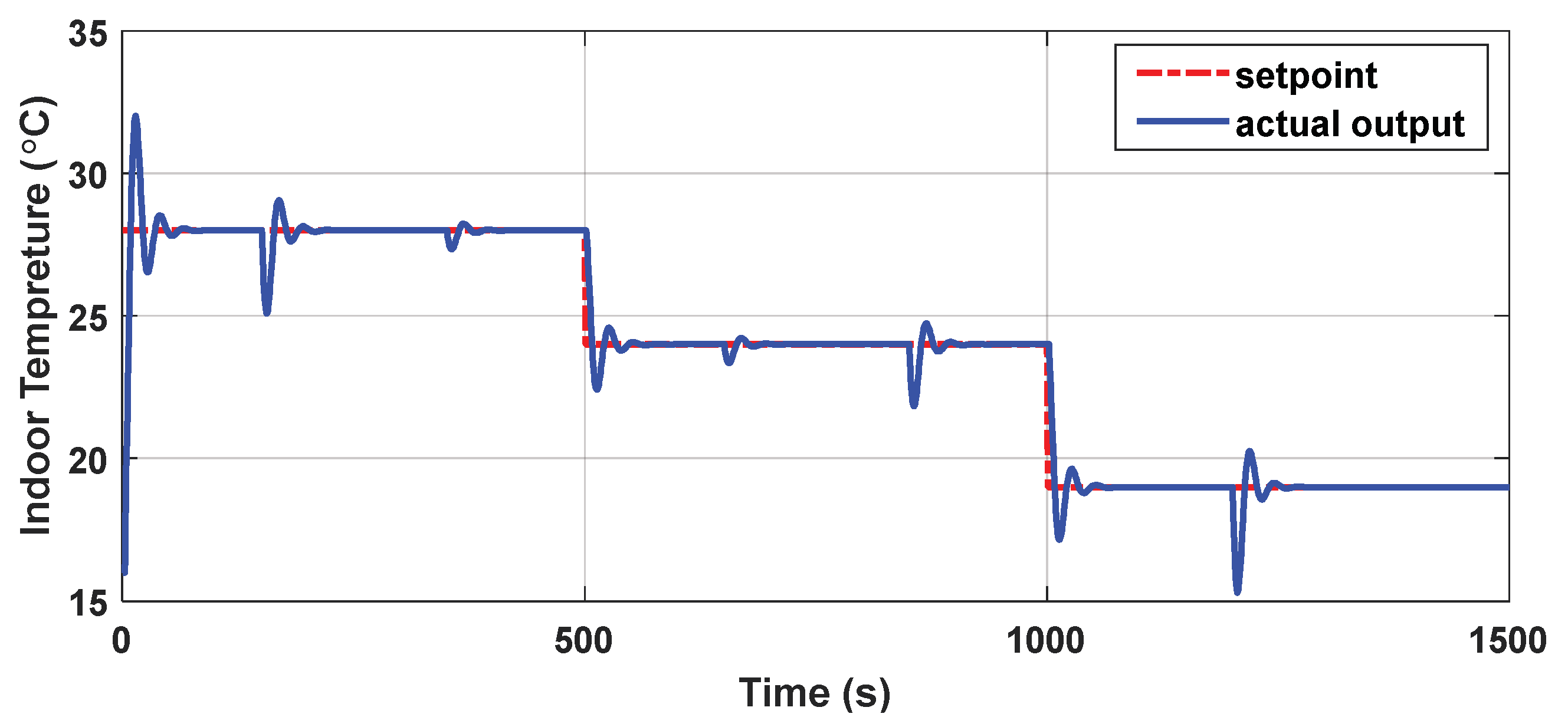
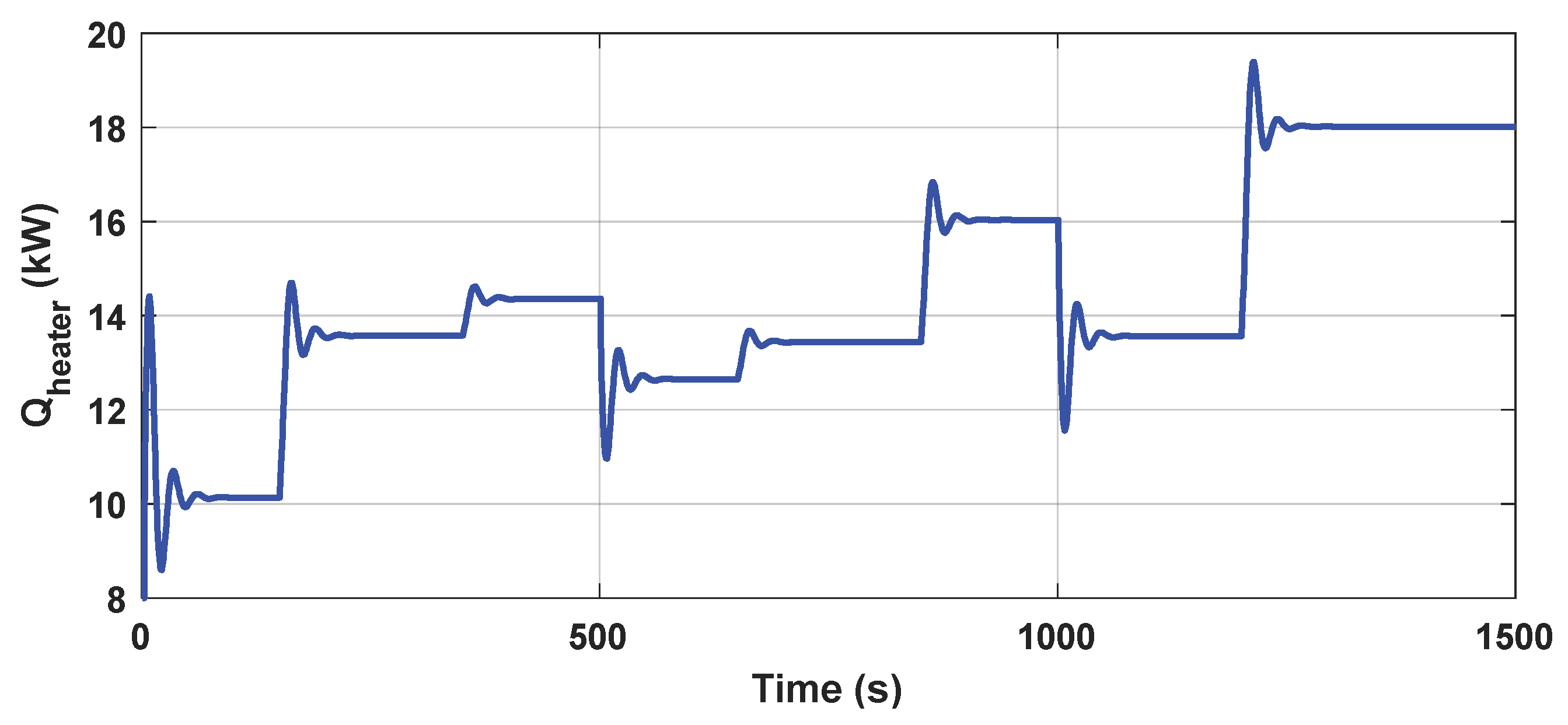
4.1. Set-Point Tracking Experiment
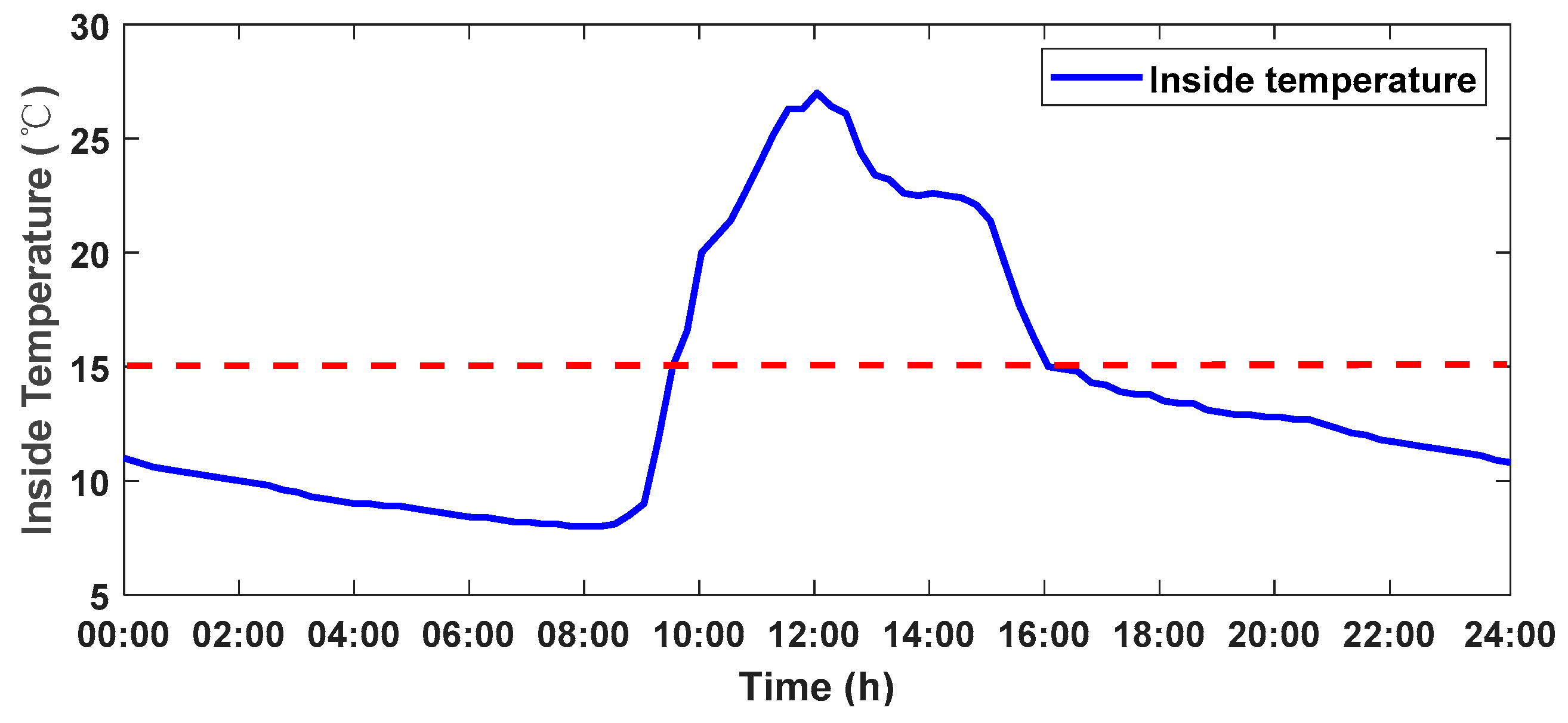
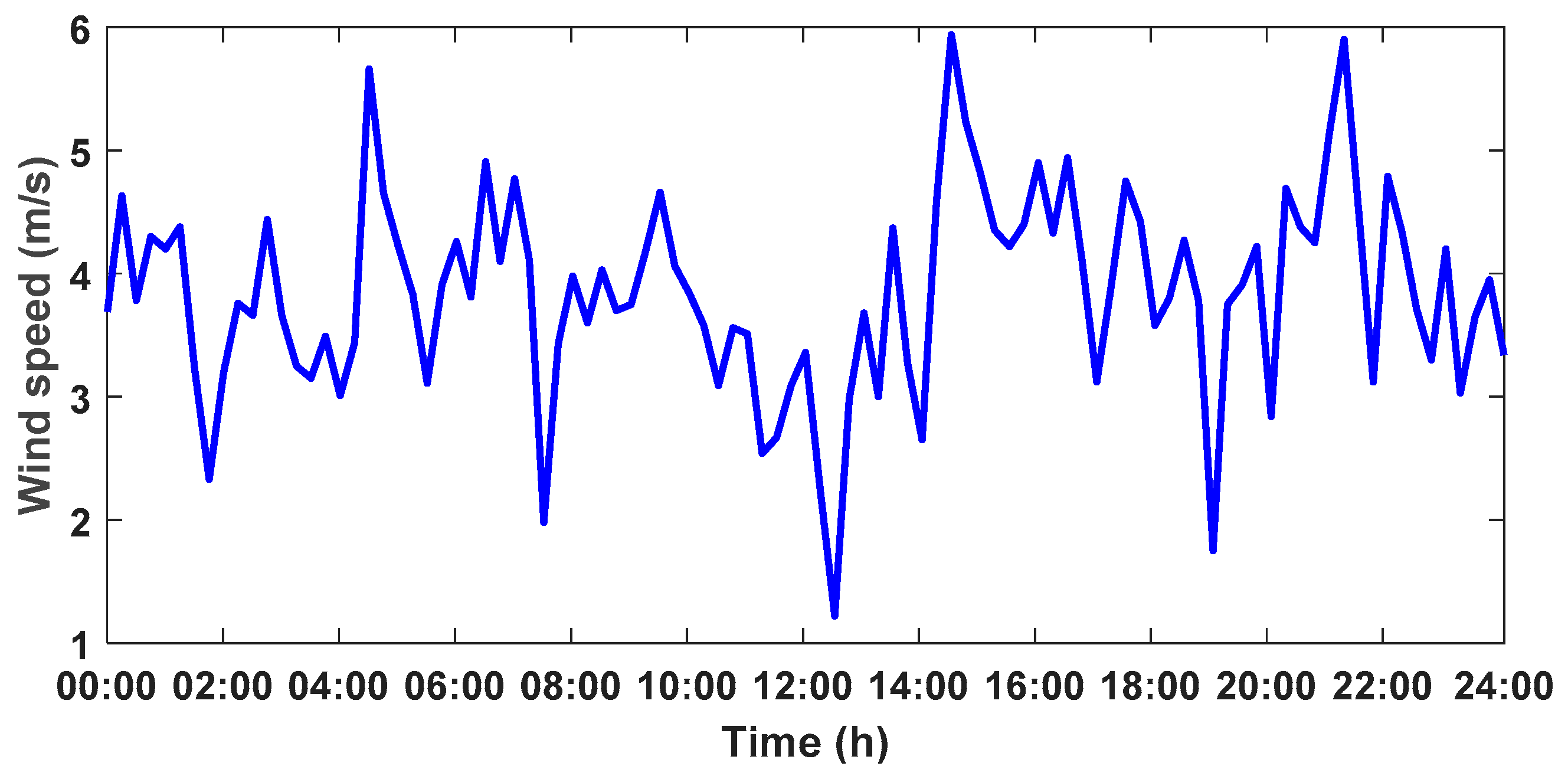
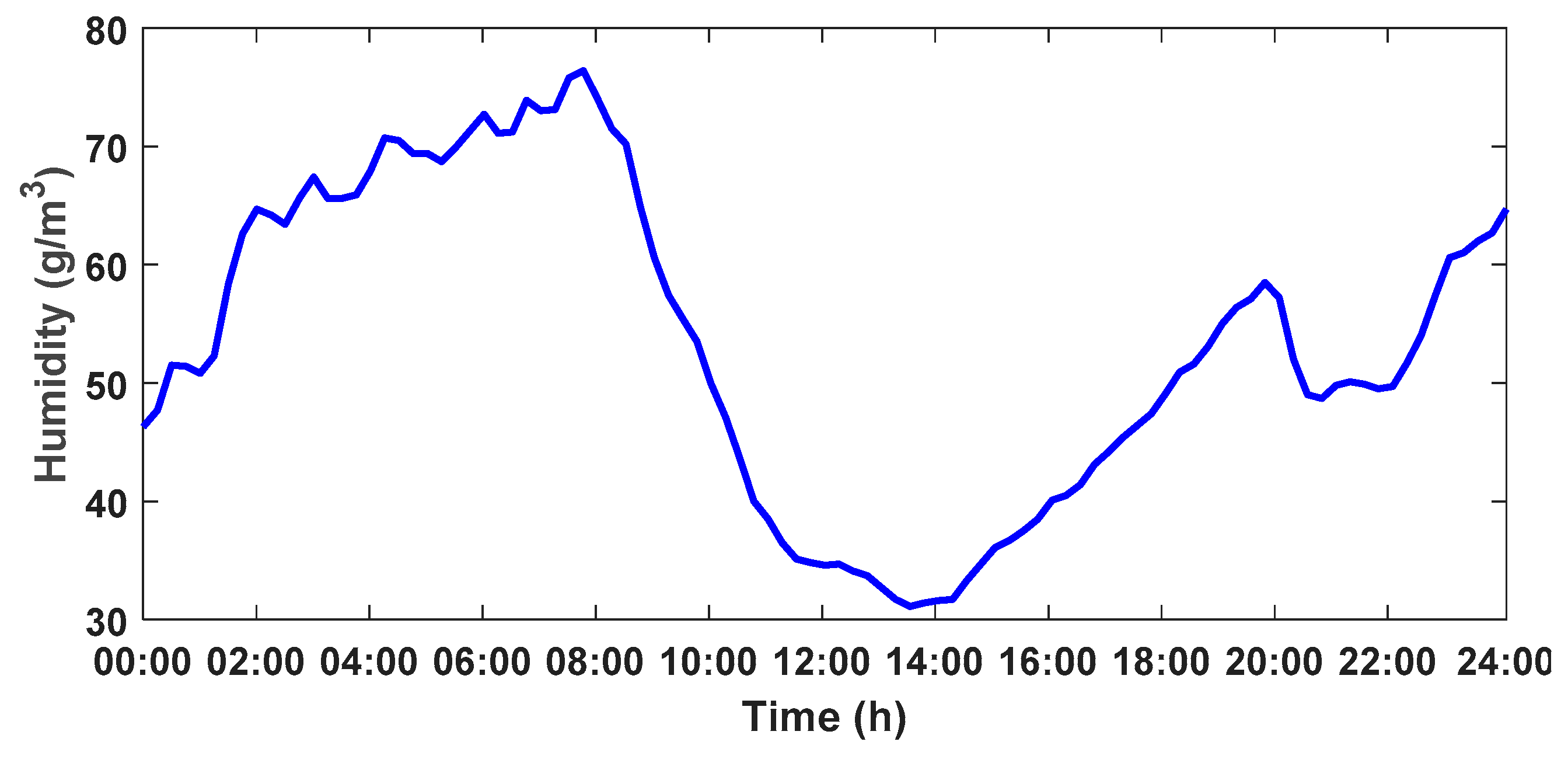
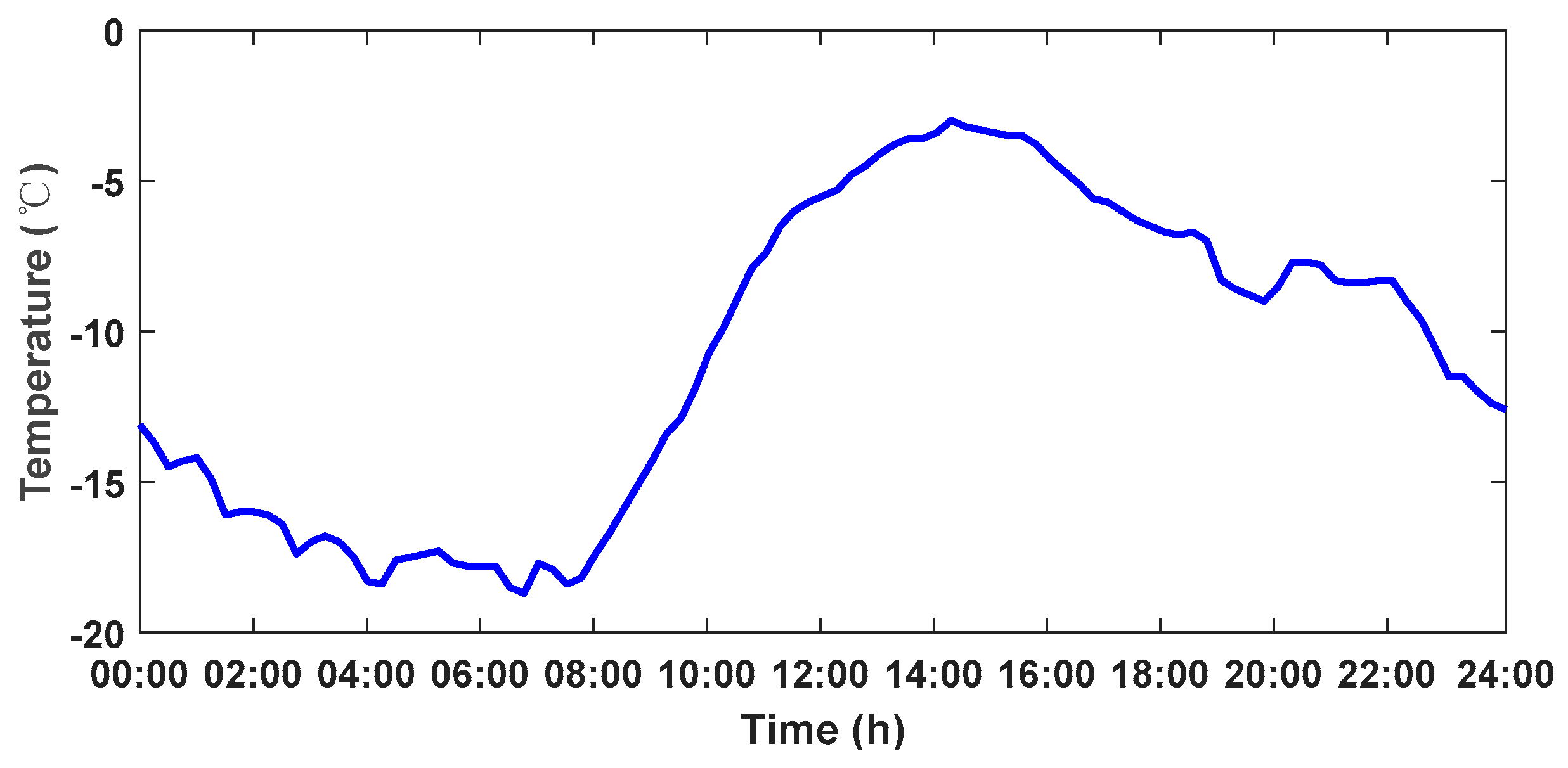
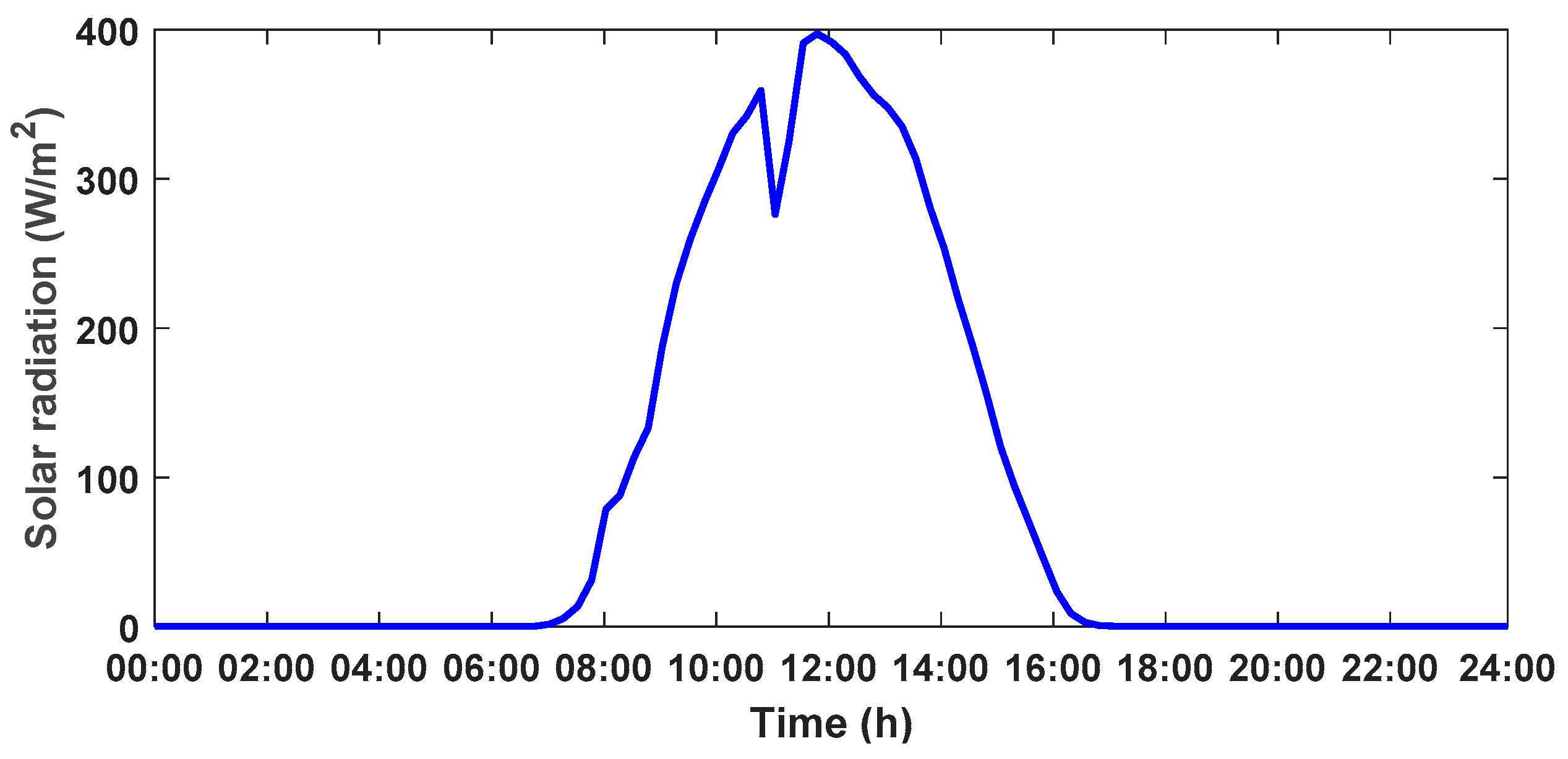
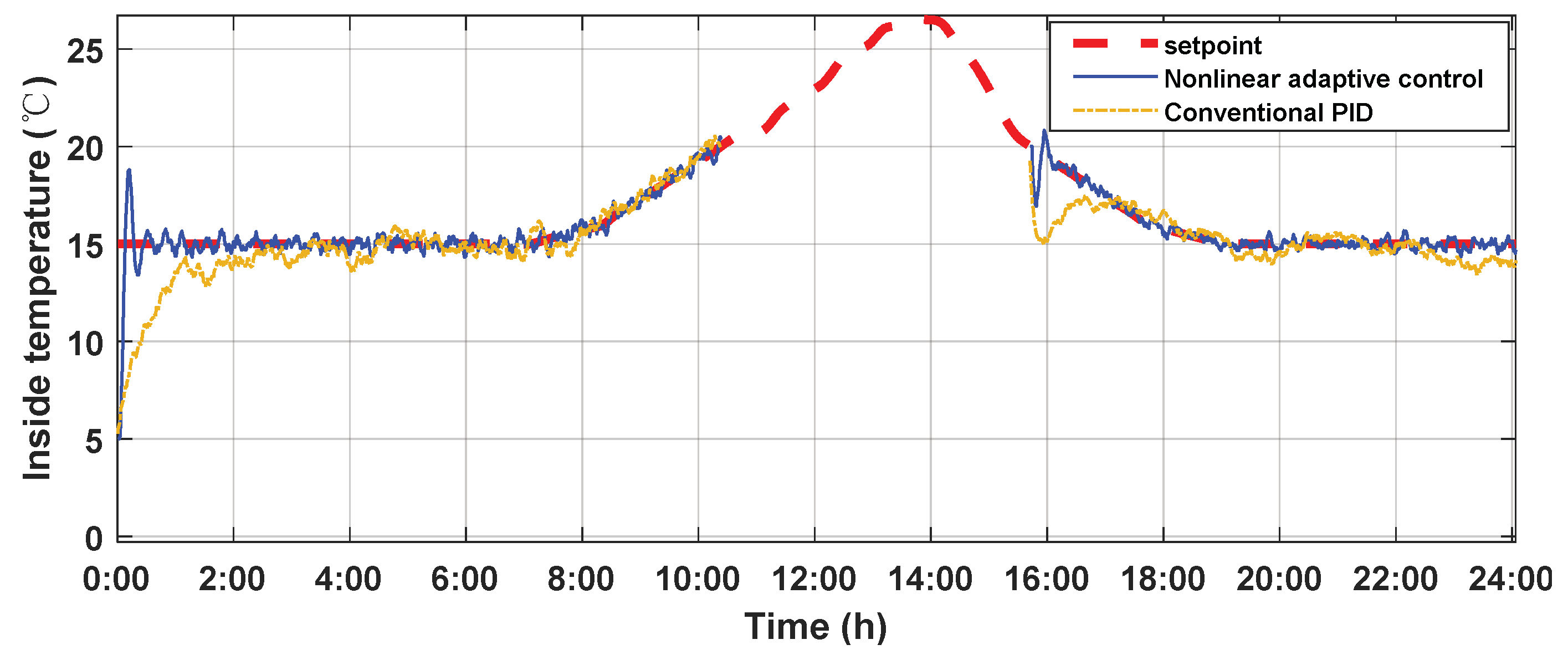
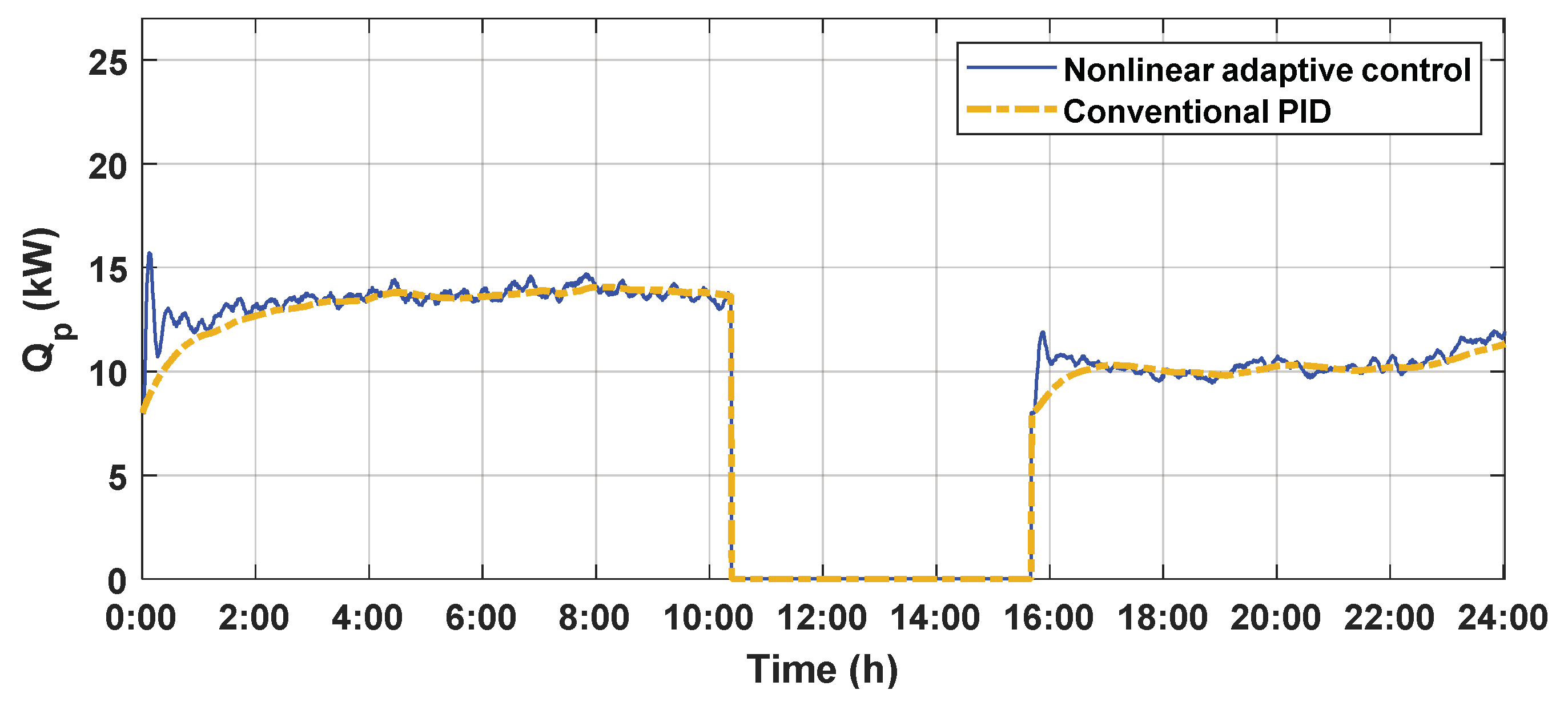
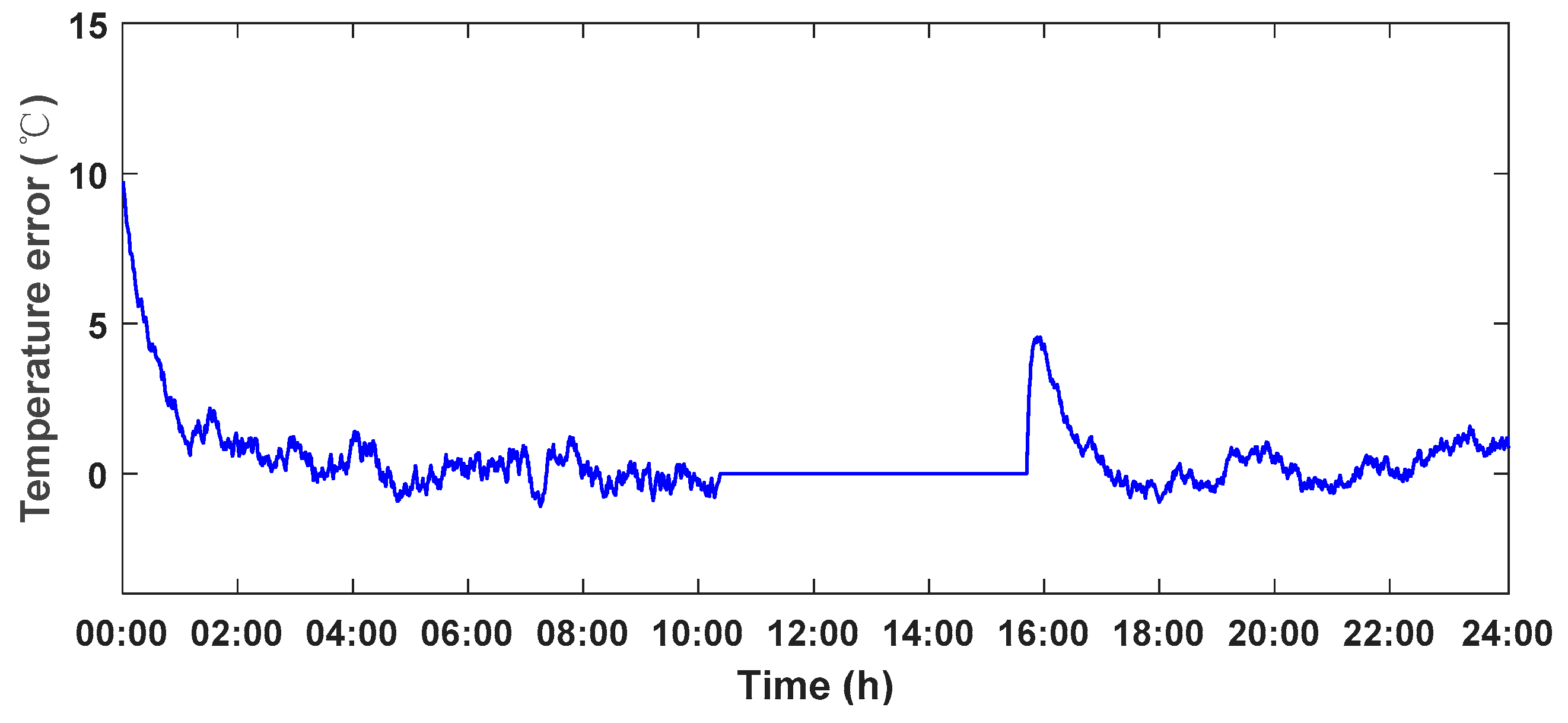
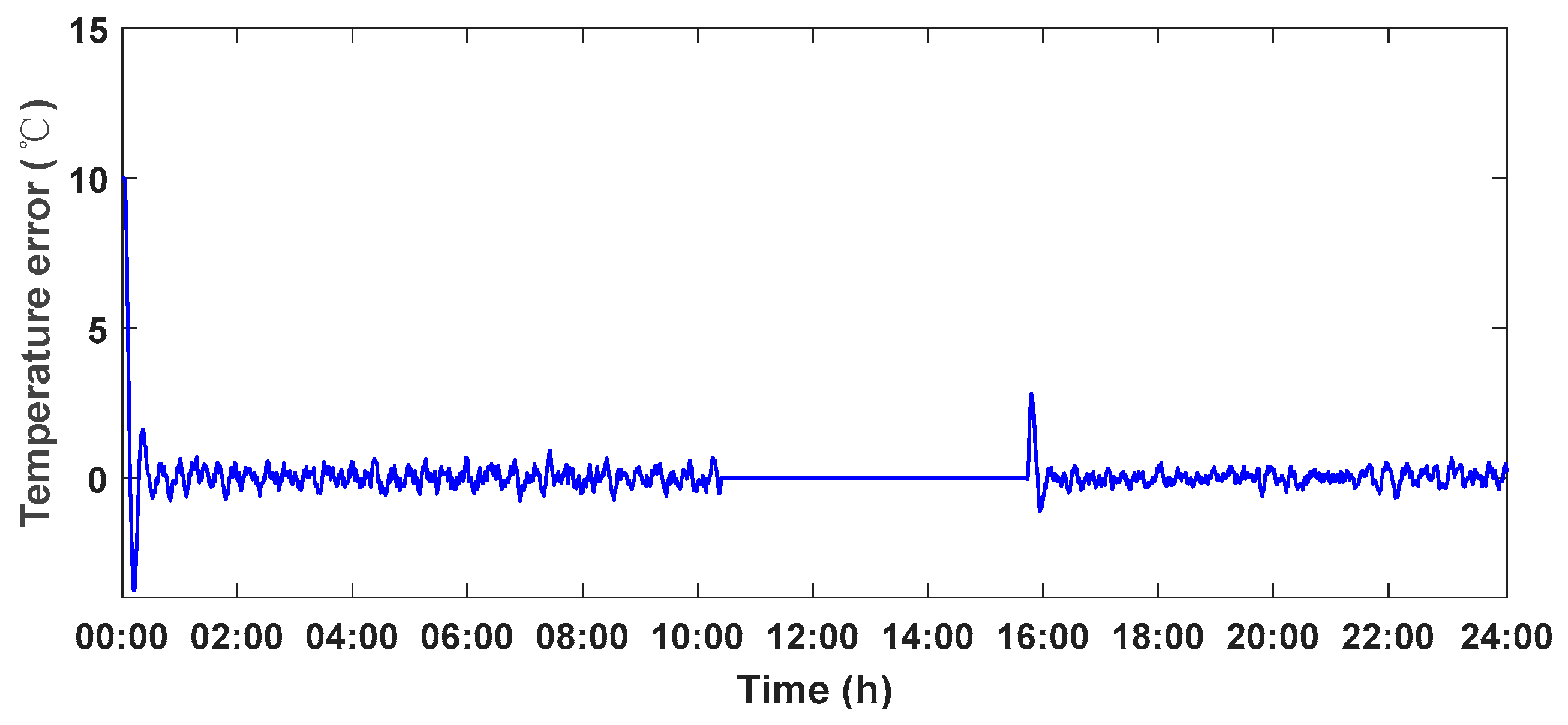
4.2. Full-Day Real Weather Experiment
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Meaning | Value Range | Unit |
|---|---|---|---|
| standard atmospheric pressure | 101 | kPa | |
| air density | 1.1691 | kg/m3 | |
| the specific heat of air at constant pressure | 1.003 | - | |
| the air saturation vapor pressure | 3.167 | kPa | |
| the psychrometric constant | 66 | Pa/°C | |
| latent heat of evaporation | 2450 | J/g | |
| outside wind speed | 0.2–12 | m/s | |
| the coefficient of convective heat loss from indoor air to the cover | (0.05–50) | - | |
| heat energy efficiency of the heating equipment | 0.85 | - | |
| the net solar radiation absorbed by crops | 100–350 | W/m2 | |
| influence coefficient of temperature change on saturated water vapor pressure | 0.001 | - | |
| outside humidity | 6–29 | g/m3 | |
| north wall area | 50 | m2 | |
| north wall temperature | 8–20 | °C | |
| convective heat transfer coefficient through north wall | 5–25 | - | |
| the heat transfer constant between crops and inside air | 13.3 | - | |
| leaf width | 0.15–0.25 | m | |
| cold air permeability coefficient | 0.2–0.5 | m/s | |
| the greenhouse global transmission | 0.6 | - | |
| surface area which absorbs solar radiation | 392 | m2 | |
| the superficial area of the cover materials | 615 | m2 | |
| the height of greenhouse | 2.5 | m | |
| the area of north roof | 100 | m2 | |
| north roof temperature | 8–25 | °C | |
| the aging coefficient of lighting material | 0.82 | - | |
| solar radiation | 100–500 | W/m2 | |
| inside wind speed | 0–0.3 | m/s | |
| soil surface temperature | 6–25 | °C | |
| the leaf temperature of crops | 6–20 | °C | |
| convective heat transfer coefficient through north roof | 5–25 | - | |
| outside air temperature | −30–8 | °C |
References
- Gruber, J.K.; Guzmán, J.L.; Rodríguez, F.; Bordons, C.; Berenguel, M.; Sánchez, J.A. Nonlinear MPC based on a Volterra series model for greenhouse temperature control using natural ventilation. Control Eng. Pract. 2010, 19, 354–366. [Google Scholar] [CrossRef]
- Elanchezhian, A.; Basak, J.K.; Park, J.; Khan, F.; Okyere, F.G.; Lee, Y.; Bhujel, A.; Lee, D.; Sihalath, T.; Kim, H.T. Evaluating different models used for predicting the indoor microclimatic parameters of a greenhouse. Appl. Ecol. Environ. Res. 2020, 18, 2141–2161. [Google Scholar] [CrossRef]
- Van Straten, G.; Van Henten, E.J.; Van Willigenburg, L.G.; VanOoteghem, R.J.C. Optimal Control of Greenhouse Cultivation, 1st ed.; CRC Press Inc.: New York, NY, USA, 2010. [Google Scholar]
- Tong, G.; Christopher, D.M.; Li, B. Numerical modelling of temperature variations in a Chinese solar greenhouse. Comput. Electron. Agric. 2009, 68, 129–139. [Google Scholar] [CrossRef]
- Amitav, B. Changing Climate and Resource Use Efficiency in Plants, 1st ed.; Bhattacharya, A., Ed.; Academic Press: San Diego, CA, USA, 2019; pp. 1–50. [Google Scholar]
- Guo, Y.; Zhao, H.; Zhang, S.; Wang, Y.; Chow, D. Modeling and optimization of environment in agricultural greenhouses for improving cleaner and sustainable crop production. J. Clean. Prod. 2020, 285, 124843. [Google Scholar] [CrossRef]
- He, Y.; Liang, M.; Chen, L.; Qiao, X.; Du, S. Greenhouse modelling and control based on T-S model. IFAC Pap. 2018, 51, 802–806. [Google Scholar]
- Sagrado, J.D.; Sánchez, J.A.; Rodríguez, F.; Berenguel, M. Bayesian networks for greenhouse temperature control. J. Appl. Logic. 2016, 17, 25–35. [Google Scholar] [CrossRef]
- Pérez-González, A.; Begovich-Mendoza, O.; Ruiz-León, J. Modeling of a greenhouse prototype using PSO and differential evolution algorithms based on a real-time LabView™ application. Appl. Soft Comput. 2018, 62, 86–100. [Google Scholar] [CrossRef]
- Yang, H.; Liu, Q.; Yang, H. Deterministic and stochastic modelling of greenhouse microclimate. Syst. Sci. Control Eng. 2019, 7, 65–72. [Google Scholar] [CrossRef]
- Li, Q.; Zhang, D.; Ji, J.; Sun, Z.; Wang, Y. Modeling of natural ventilation using a hierarchical fuzzy control system for a new energy- saving solar greenhouse. Appl. Eng. Agric. 2018, 34, 953–962. [Google Scholar] [CrossRef]
- Åström, K.J.; Hägglund, T. PID Controllers: Theory, Design and Tuning, 2nd ed.; Instrument Society of America: Research Triangle, NC, USA, 1995. [Google Scholar]
- Su, Y.; Xu, L.; Erik, D.G. Greenhouse climate fuzzy adaptive control considering energy saving. Int. J. Control Autom. Syst. 2017, 15, 1936–1948. [Google Scholar] [CrossRef]
- Morteza, T.; Yahya, A.; Seyed, F.R.; Abbas, R.; Mansour, M. Heat transfer and MLP neural network models to predict inside environment variables and energy lost in a semi-solar greenhouse. Energy Build. 2016, 110, 314–329. [Google Scholar]
- Jang, Y.; Goto, E.; Ishigami, Y.; Mun, B.; Chun, C. Effects of light intensity and relative humidity on photosynthesis, growth and graft-take of grafted cucumber seedlings during healing and acclimatization. Hortic. Environ. Biotechnol. 2011, 52, 331. [Google Scholar] [CrossRef]
- Wang, L.; Zhang, H. An adaptive fuzzy hierarchical control for maintaining solar greenhouse temperature. Comput. Electron. Agric. 2018, 155, 251–256. [Google Scholar] [CrossRef]
- Chen, L.; Du, S.; Liang, M.; He, Y. Adaptive Feedback Linearization-based Predictive Control for Greenhouse Temperature. IFAC Pap. 2018, 51, 784–789. [Google Scholar]
- MontoyaRíos, A.P.; GarcíaMañas, F.; Guzmán, J.L.; Rodríguez, F. Simple Tuning Rules for Feedforward Compensators Applied to Greenhouse Daytime Temperature Control Using Natural Ventilation. Agronomy 2020, 10, 1327. [Google Scholar] [CrossRef]
- Tanaya, C.; Yeng, C.S.; Li, H.; Xie, L. A feedforward neural network based indoor-climate control framework for thermal comfort and energy saving in buildings. Appl. Energy 2019, 248, 44–53. [Google Scholar]
- Christelle, L.; Thierry, S.; Laurent, L.; Roger, A. Optimal release strategies for the biological control of aphids in melon greenhouses. Biol. Control 2008, 48, 12–21. [Google Scholar]
- Jin, C.; Mao, H.; Chen, Y.; Shi, Q.; Wang, Q.; Ma, G.; Liu, Y. Engineering-oriented dynamic optimal control of a greenhouse environment using an improved genetic algorithm with engineering constraint rules. Comput. Electron. Agric. 2020, 177, 105698. [Google Scholar] [CrossRef]
- Rim, B.A.; Salwa, B.; Abdelkader, M. Development of a Fuzzy Logic Controller applied to an agricultural greenhouse experimentally validated. Appl. Therm. Eng. 2018, 141, 798–810. [Google Scholar]
- Revathi, S.; Sivakumaran, N. Fuzzy Based Temperature Control of Greenhouse. IFAC Pap. 2016, 49, 549–554. [Google Scholar] [CrossRef]
- Chen, L.; Du, S.; He, Y.; Liang, M.; Xu, D. Robust model predictive control for greenhouse temperature based on particle swarm optimization. Inf. Process. Agric. 2018, 5, 329–338. [Google Scholar] [CrossRef]
- Bennis, N.; Duplaix, J.; Enéa, G.; Haloua, M.; Youlal, H. Greenhouse climate modelling and robust control. Comput. Electron. Agric. 2007, 61, 96–107. [Google Scholar] [CrossRef]
- Sands, T. Development of Deterministic Artificial Intelligence for Unmanned Underwater Vehicles (UUV). J. Mar. Sci. Eng. 2020, 8, 578. [Google Scholar] [CrossRef]
- Chen, C.; Khalil, H.K. Adaptive control of a class of nonlinear discrete-time systems using neural networks. IEEE Trans. Autom. Control 1995, 40, 791–801. [Google Scholar] [CrossRef] [Green Version]
- Niu, B.; Wang, D.; Alotaibi, N.D.; Alsaadi, F.E. Adaptive neural state-feedback tracking control of stochastic nonlinear switched systems: An average dwell-time method. IEEE Trans. Neural Netw. Learn. Syst. 2019, 30, 1076–1087. [Google Scholar] [CrossRef]
- Cheng, L.; Wang, Z.; Jiang, F.; Li, J. Adaptive neural network control of nonlinear systems with unknown dynamics. Adv. Space Res. 2021, 67, 1114–1123. [Google Scholar] [CrossRef]
- Yao, D.; Dou, C.; Yue, D.; Zhao, N.; Zhang, T. Adaptive neural network consensus tracking control for uncertain multi-agent systems with predefined accuracy. Nonlinear Dyn. 2020, 101, 1–14. [Google Scholar] [CrossRef]
- Wang, Y.; Chai, T.; Fu, J.; Sun, J.; Wang, H. Adaptive decoupling switching control of the forced-circulation evaporation system using neural networks. Control Systems Technology. IEEE Trans. Control Syst. Technol. 2013, 21, 964–974. [Google Scholar] [CrossRef]
- Márquez-Vera, M.A.; Ramos-Fernández, J.C.; Cerecero-Natale, L.F.; Frédéric, L.; Jean-Franço, B. Temperature control in a MISO greenhouse by inverting its fuzzy model. Comput. Electron. Agric. 2016, 124, 168–174. [Google Scholar] [CrossRef]
- Iddio, E.; Wang, L.; Thomas, Y.; McMorrow, G.; Denzer, A. Energy efficient operation and modeling for greenhouses: A literature review. Renew. Sustain. Energy Rev. 2020, 117, 109480. [Google Scholar] [CrossRef]
- Lafont, F.; Balmat, J.F. Optimized fuzzy control of a greenhouse. Fuzzy Sets Syst. 2002, 128, 47–59. [Google Scholar] [CrossRef]
- Noureddine, C.; Amine, A.; Anas, E.M.; Tarik, K.; Said, S.; Abdelmajid, J. Review on greenhouse microclimate and application: Design parameters, thermal modeling and simulation, climate controlling technologies. Sol. Energy 2019, 191, 109–137. [Google Scholar]
- Henten, E.J.V. Sensitivity Analysis of an Optimal Control Problem in Greenhouse Climate Management. Biosyst. Eng. 2003, 85, 355–364. [Google Scholar] [CrossRef]
- Xu, D.; Du, S.; Willigenburg, L.G.V. Optimal control of Chinese solar greenhouse cultivation. Biosyst. Eng. 2018, 171, 205–219. [Google Scholar] [CrossRef]
- Boulard, T.; Wang, S. Greenhouse crop transpiration simulation from external climate conditions. Agric. For. Meteorol. 2000, 100, 25–34. [Google Scholar] [CrossRef]
- Boulard, T.; Baille, A. A simple greenhouse climate control model incorporating effects of ventilation and evaporative cooling. Agric. For. Meteorol. 1993, 65, 145–157. [Google Scholar] [CrossRef]
- Improna, I.; Hemming, S.; Bot, G.P.A. Simple greenhouse climate model as a design tool for greenhouses in tropical lowland. Biosyst. Eng. 2007, 98, 79–89. [Google Scholar] [CrossRef]
- Atyah, N.; Afif, H. Modeling of greenhouse with PCM energy storage. Energy Convers. Manag. 2008, 49, 3338–3342. [Google Scholar]
- Wang, Y.; Chai, T.; Fu, J.; Zhang, Y.; Fu, Y. Adaptive decoupling switching control based on generalised predictive control. IET Control Theory Appl. 2012, 6, 1828–1841. [Google Scholar] [CrossRef]
- Zhang, J.; Sun, H.; Qi, Y.; Deng, S. Temperature control strategy of incubator based on RBF neural network PID. World Sci. Res. J. 2020, 6, 7–15. [Google Scholar]
- Zhou, Y.; Wang, A.; Zhou, P.; Wang, H.; Chai, T. Dynamic performance enhancement for nonlinear stochastic systems using RBF driven nonlinear compensation with extended Kalman filter. Automatica 2020, 112, 108693. [Google Scholar] [CrossRef]


















| Methods | Temperature Error (°C) | Corresponding Line Front | |
|---|---|---|---|
| Mean | Standard | ||
| Conventional PID | 0.8460 | 1.8480 | orange, dash-dot |
| Nonlinear adaptive control | 0.2967 | 1.3342 | blue, solid |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Lu, Y.; Xiao, R. Application of Nonlinear Adaptive Control in Temperature of Chinese Solar Greenhouses. Electronics 2021, 10, 1582. https://doi.org/10.3390/electronics10131582
Wang Y, Lu Y, Xiao R. Application of Nonlinear Adaptive Control in Temperature of Chinese Solar Greenhouses. Electronics. 2021; 10(13):1582. https://doi.org/10.3390/electronics10131582
Chicago/Turabian StyleWang, Yonggang, Yujin Lu, and Ruimin Xiao. 2021. "Application of Nonlinear Adaptive Control in Temperature of Chinese Solar Greenhouses" Electronics 10, no. 13: 1582. https://doi.org/10.3390/electronics10131582
APA StyleWang, Y., Lu, Y., & Xiao, R. (2021). Application of Nonlinear Adaptive Control in Temperature of Chinese Solar Greenhouses. Electronics, 10(13), 1582. https://doi.org/10.3390/electronics10131582