
On-Board Data Management Layer: Connected Vehicle as Data Platform


Abstract
:1. Introduction
2. Background
2.1. Academia
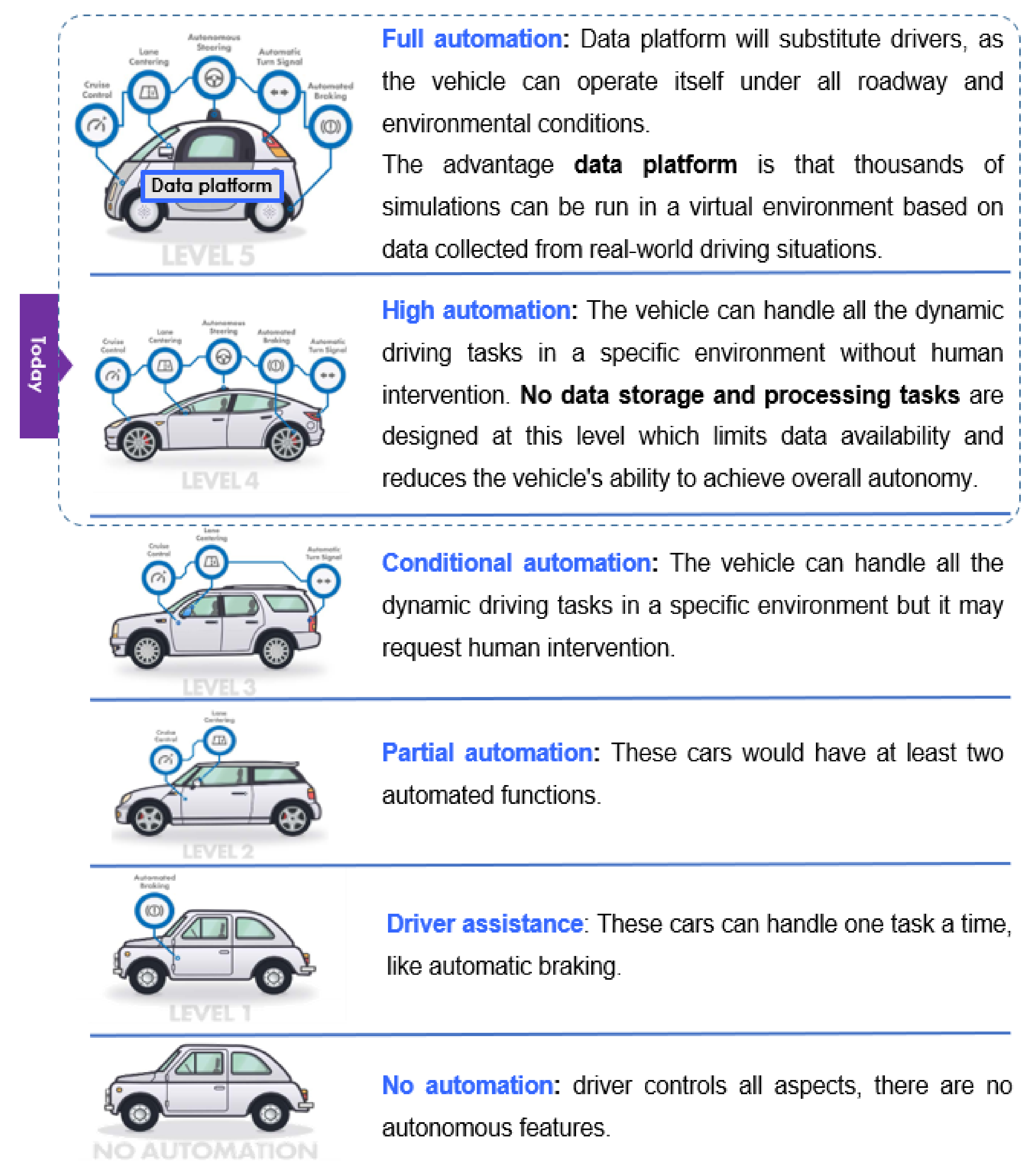
2.2. Automotive Industry
3. On-Board Data Management Layer: Our Proposal
3.1. Basic Concept
3.2. On-Board Data-Oriented Architecture
3.2.1. Data Management Layer
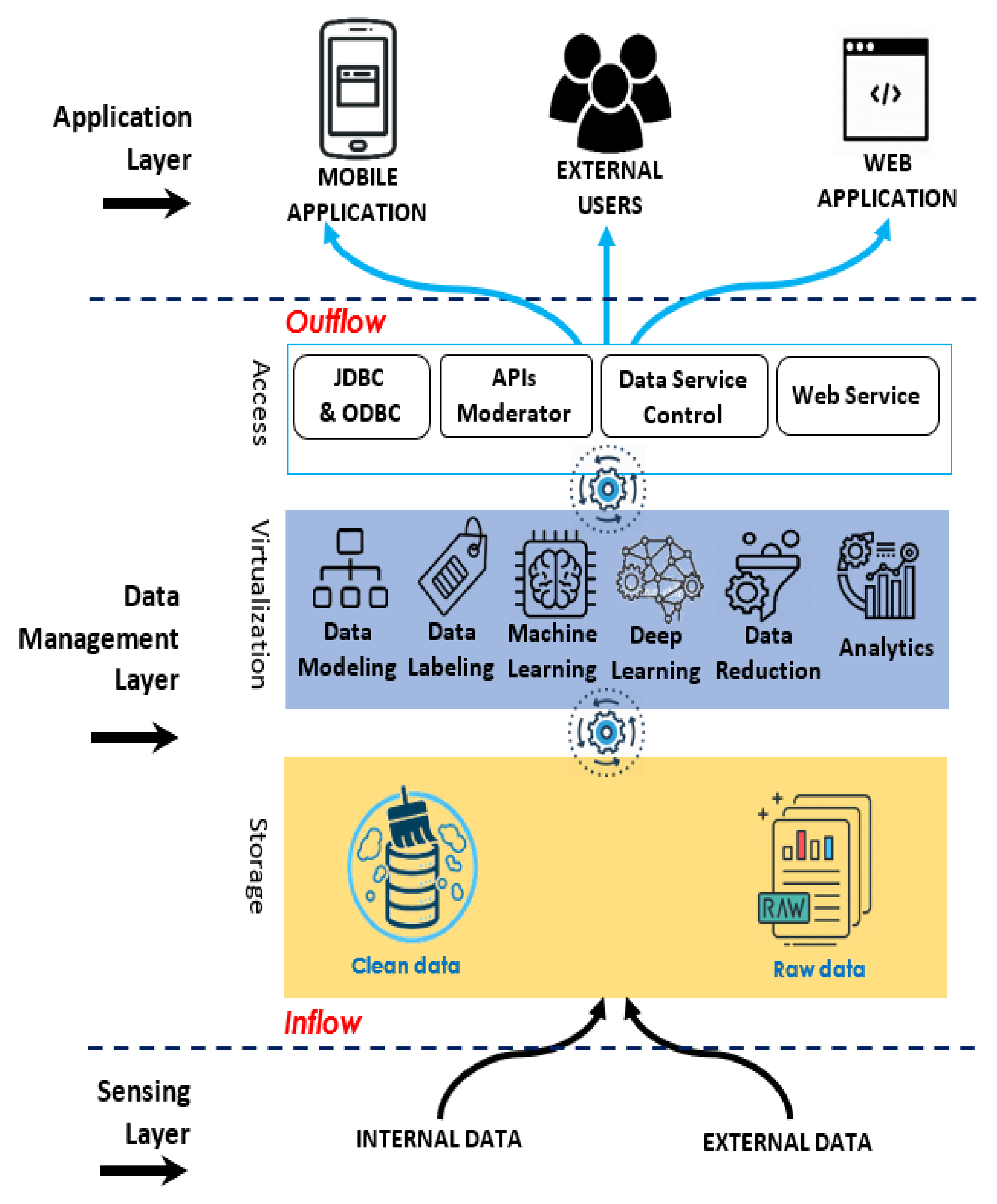
- Storage The on-board storage sublayer is the central repository that allows the vehicle to store all incoming flow from the sensing layer as-is in its original format, whether it has been collected from multiple out-vehicle sources or generated inside the vehicle through different sensors and actuator. The storage sublayer includes two types of data: raw data and clean data obtained after processing by the tools of the data science sublayer. The proposed on-board storage allows us the following key features: (1) build applications, namely helps road users, transport agents, and third parties to access the transport data and quickly build the views and data-driven applications they really need; (2) retain data authenticity, namely store and analyze the information in different formats, retaining data authenticity; (3) speed, i.e., the ability to sift through immense quantities of data quickly; (4) explore and analyze, i.e., the ability to explore and analyze data, perform analytics, and derive different values and benefits.
- Virtualization This sublayer represents the area of data science that curates the data into a more manageable structure to break the complexity of raw data. Multiple data science tools are performed at this level to reduce, model, shape, and structure the raw data and perform machine learning to provide useful insights including real-time and historical data.
- Access The access sub-layer helps data to be accessed in various ways by multiple front-end tools. Outflow is at the top of this sublayer. Publishing is performed as data services that allow road users and third parties to reuse the stored data through a push/pull mechanism.
3.2.2. On-Board Computing Paradigm: Advantages
4. Study Case: On-Board Data Platform for Machine Learning
4.1. Dataset and Configurations
4.1.1. Data
4.1.2. On-Board Hardware configuration
4.1.3. On-Board Software Configuration
4.2. Data Management Layer: Functionalities
- Data Storage;
- Data Modeling;
- Data Reduction;
- Data Analysis;
- Data Publishing;
4.2.1. Data Storage
4.2.2. Data Modeling
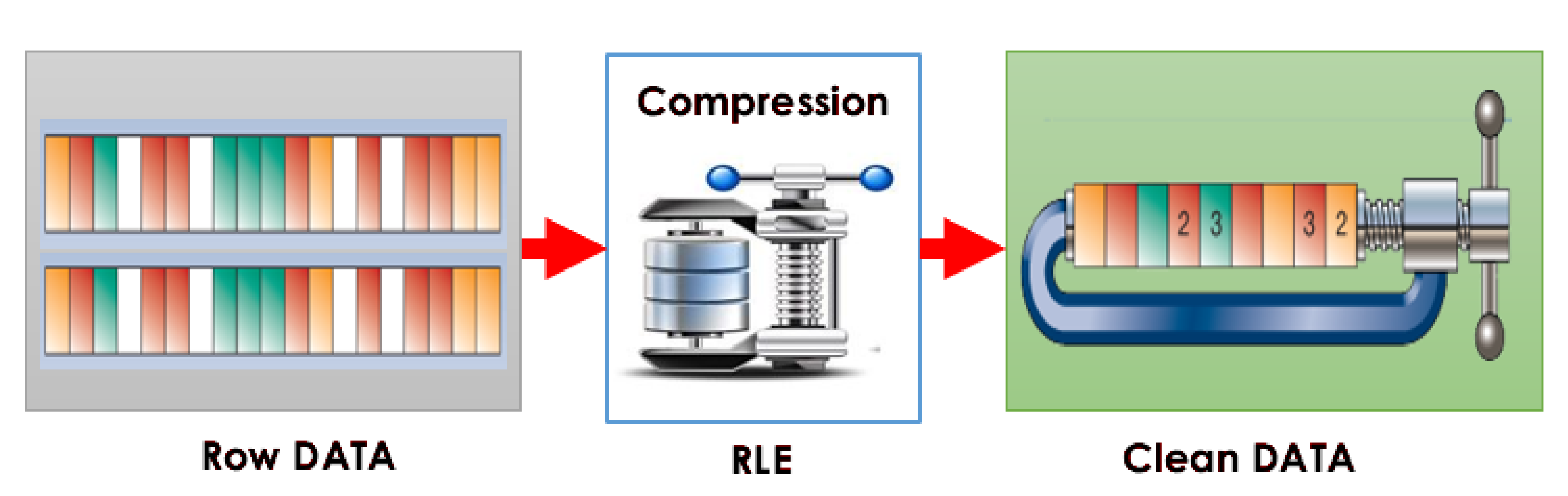
4.2.3. Data Reduction
4.2.4. Data Analysis
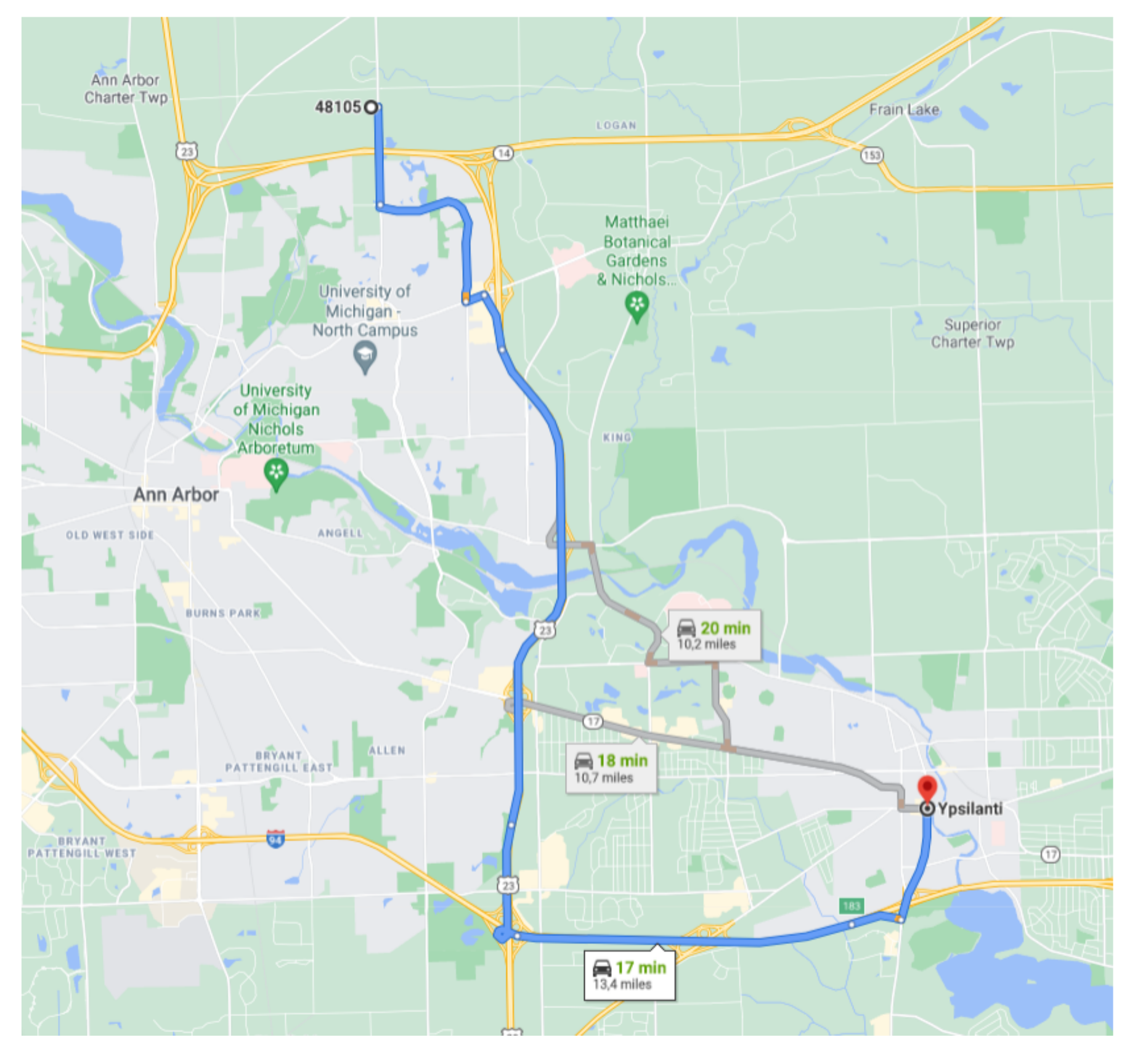
- Preparing data: Exploiting the vehicle type data element, vehicles that have been included in the prediction process were classified into the following categories: commercial vehicles, traveler car, and busses. The analyzed dataset included the traffic amount of the first 3 h in the morning, during the period from 7:00 a.m. to 10:00 a.m. over an entire week across 13.4 miles, as illustrated in Figure 7.Traffic flow is usually defined as the count of vehicles that pass through a particular road, path, or intersection during a period of time, usually expressed as vehicles per hour. Using the position data frame, we were able to know how many vehicles have passed through the fragment illustrated in Figure 7 and extract the amount of traffic flow. We also draw attention to the fact that we considered both directions of the road. The 5 min data extraction is shown in Table 5.
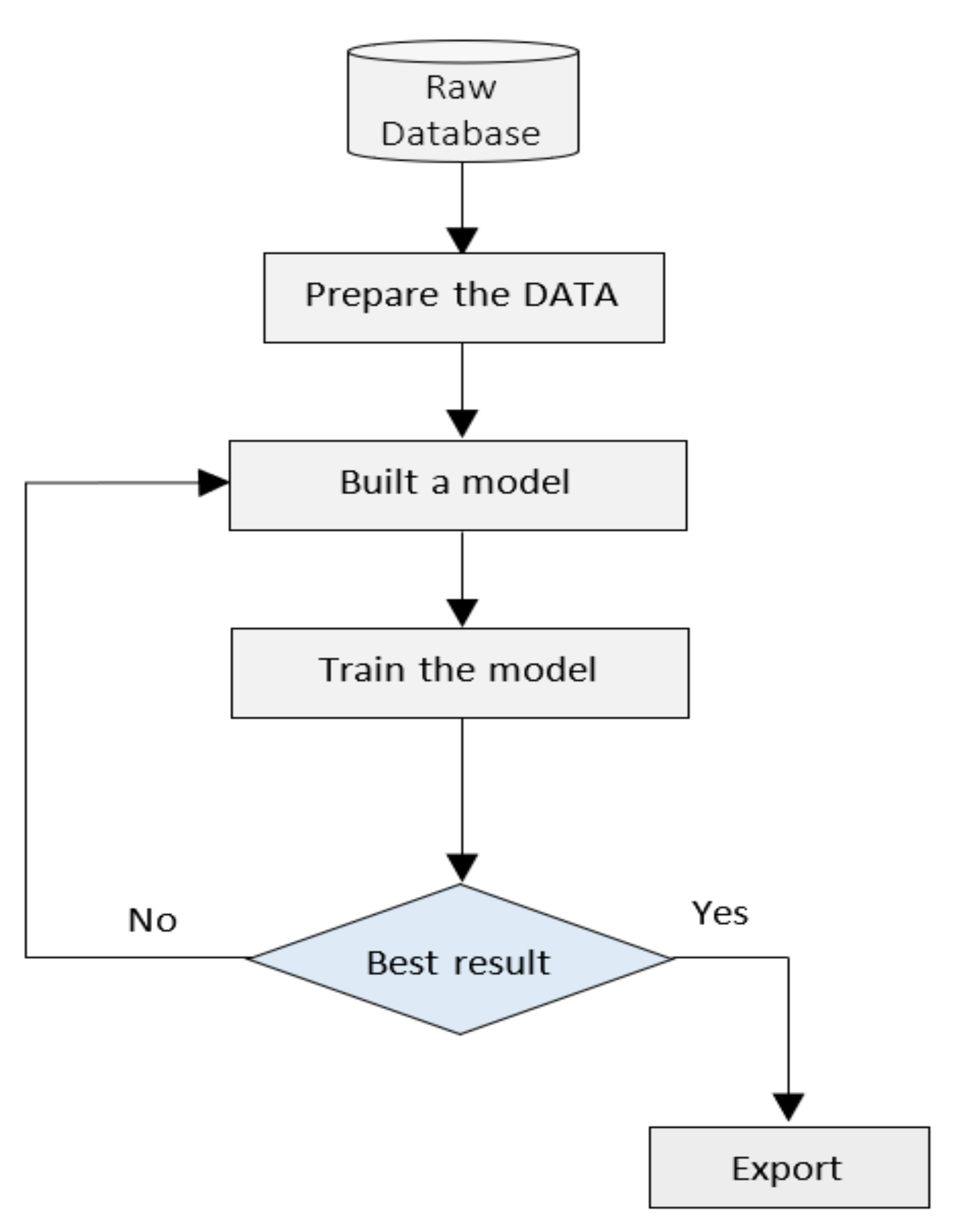
- Developing best model: We used the multilayer perceptron (MLP) ANN to fulfill the traffic flow prediction. As a class of feedforward ANN, an MLP consists of at least three layers of nodes: input layer, hidden layer, and output layer. MLP utilizes the backpropagation technique for training.Table 6 includes the set of the analyzed dataset characteristics: date; time; number of traveler cars, buses, and commercial vehicles; median speed of traveler cars, buses, and commercial vehicles; and traffic density, which is indicated by the number of vehicles occupying a road segment. Table 6 also includes the sensibility, which is a mathematical expectation of how the neural network’s output will be affected by the expected deviation of its input.To develop the most suitable model, we took the following steps:
- Random arrangement of the dataset.
- Dividing the dataset into subgroups: The training subgroup represents 10% of the dataset; the cross-validation subgroup represents 10%; the test subgroup represents the remaining 80% of the dataset.
- Developing of different ANN models and then training them using the training subgroup; determining the performance of each model using cross-validation subgroup.
- Using different parameters indicated at the top of Table 7 to evaluate different predicted results’ performance.
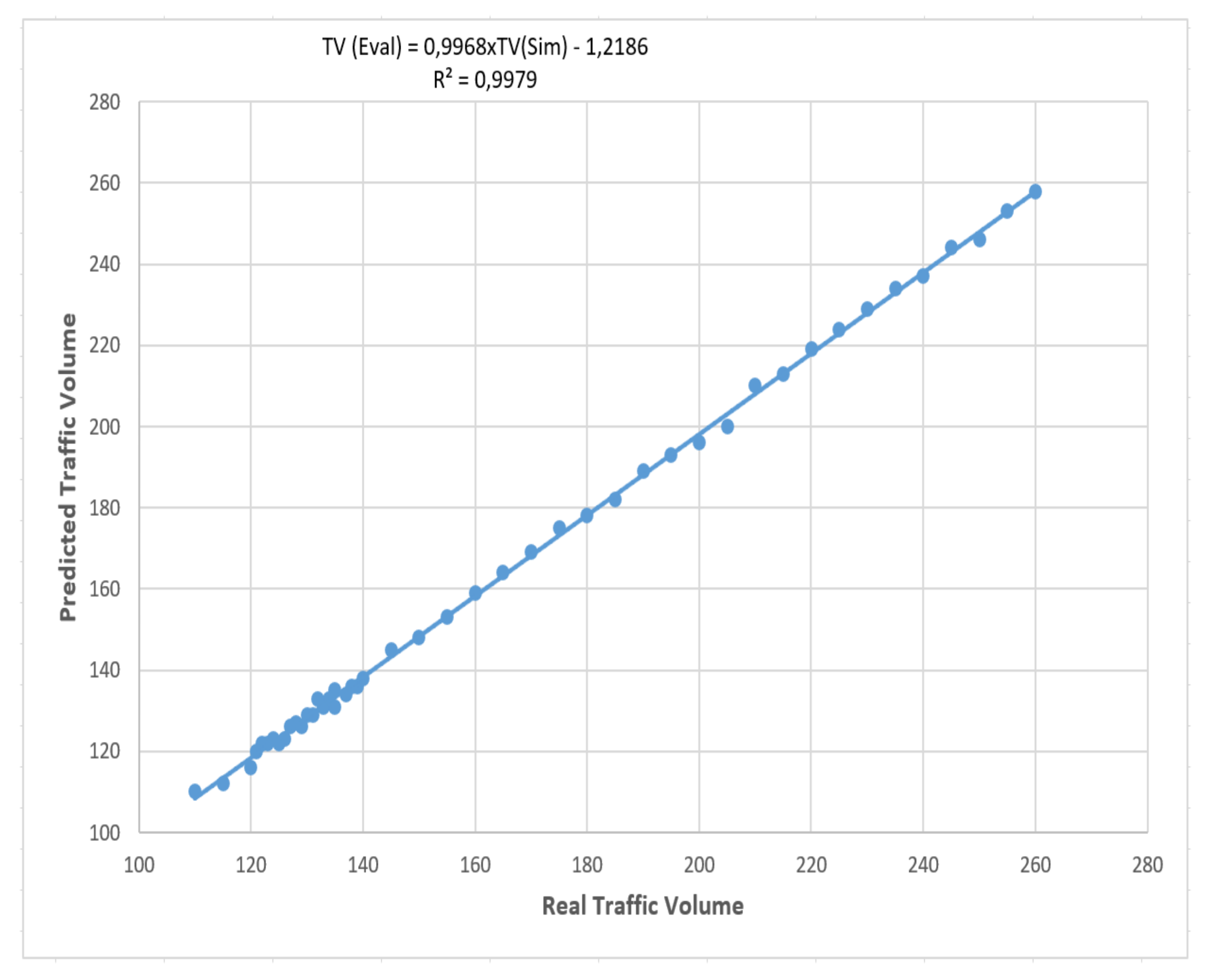
Based on Table 7, the best ANN model has three hidden neurons. - Results and discussionFigure 8 shows the linear correlation between the expected and real flow values and Table 8 summarizes the output of the eligible ANN test stage.We can clearly see the very small value of errors along with a very good value of the correlation coefficient.Accordingly, it could be considered that our developed ANN has succeeded in reusing the stored data to predict even for a short time the traffic flow in the future. Thus, our data platform can play a major role in providing a valuable transport dataset that can be exploited for machine learning.
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Schrank, D.; Eisele, B.; Lomax, T. 2019 Urban Mobility Report; Texas A&M University System: College Station, TX, USA, 2019; Volume 10, pp. 4–7. [Google Scholar]
- U.S. Department of Transportation. Available online: https://www.transportation.gov/ (accessed on 1 June 2021).
- European Commission. Mobility and Transport, Road Safety. Available online: https://ec.europa.eu/transport/road_safety/ (accessed on 1 June 2021).
- European Transport Safety Council. Available online: http://etsc.eu/ (accessed on 1 June 2021).
- Japan Transport Safety Board. Available online: https://www.mlit.go.jp/jtsb/english.html (accessed on 1 June 2021).
- ADSSS—UTMS Society of Japan. Available online: http://www.utms.or.jp/english/system/dsss.html (accessed on 1 June 2021).
- UK Association for the Promotion of Intelligent Transport Systems. Available online: https://its-uk.org.uk/ (accessed on 1 June 2021).
- Australian Trade and investment Commission, Future Transport and Mobility. Available online: https://www.austrade.gov.au/future-transport/ (accessed on 1 June 2021).
- Anderson, J.M.; Nidhi, K.; Karlyn, D.S.; Paul, S.; Constantine, S.; Oluwatola, T.A. Autonomous Vehicle Technology: A Guide for Policymakers; RAND Corporation: Santa Monica, CA, USA, 2016; Available online: https://www.rand.org/pubs/research_reports/RR443-2.html. (accessed on 1 June 2021).
- Molina-Masegosa, R.; Gozalvez, J. LTE-V for Sidelink 5G V2X Vehicular Communications: A New 5G Technology for Short-Range Vehicle-to-Everything Communications. IEEE Veh. Tech. Mag. 2017, 12, 30–39. [Google Scholar] [CrossRef]
- Miucic, R. (Ed.) Connected Vehicles, Intelligent Transportation Systems; Springer International Publishing: Cham, Switzerland, 2019. [Google Scholar]
- MacHardy, Z.; Khan, A.; Obana, K.; Iwashina, S. V2X Access Technologies: Regulation, Research, and Remaining Challenges. IEEE Com. Surv. Tutor. 2018, 20, 1858–1877. [Google Scholar] [CrossRef]
- Wallace, R.; Spulber, A.; Dennis, E.P. International scan of connected vehicle technology deployment efforts. Cent. Automot. Res. Tech. Rep. 2017. Available online: https://www.cargroup.org/publication/international-scan-of-connected-and-automated-vehicle-technology-deployment-efforts/ (accessed on 1 June 2021).
- Siegel, J.E.; Erb, D.C.; Sarma, S.E. A Survey of the Connected Vehicle Landscape—Architectures, Enabling Technologies, Applications, and Development Areas. IEEE Trans. ITS 2018, 19, 2391–2406. [Google Scholar] [CrossRef] [Green Version]
- Robert, G. (Ed.) Intelligent Transportation Systems Functional Design for Effective Traffic Management; Springer International Publishing: Cham, Switzerland, 2016. [Google Scholar] [CrossRef]
- Rettore, P.H.; Maia, G.; Villas, L.A.; Loureiro, A.A.F. Vehicular Data Space: The Data Point of View. IEEE Com. Surv. Tutor. 2019, 21, 2392–2418. [Google Scholar] [CrossRef]
- Khan, J.A.; Doudane, Y.G. ROVERS: Incentive-Based Recruitment of Connected Vehicles for Urban Big Data Collection. IEEE Trans. Veh. Tech. 2019, 68, 5281–5294. [Google Scholar] [CrossRef]
- Abdelhamid, S.; Hassanein, H.S.; Takahara, G. Reputation-aware, trajectory-based recruitment of smart vehicles for public sensing. IEEE Trans. Int. Tran. Sys. Veh. Tech. 2018, 19, 1387–1400. [Google Scholar] [CrossRef]
- Jalooli, A.; Song, M.; Wang, W. Message coverage maximization in infrastructure-based urban vehicular networks. Els. Veh. Com. 2019, 16, 1–14. [Google Scholar] [CrossRef]
- Turcanu, I.; Salvo, P.; Baiocchi, A.; Cuomo, F.; Engel, T. A multi-hop broadcast wave approach for floating car data collection in vehicular networks. Veh. Commun. 2020, 24, 100232. [Google Scholar] [CrossRef] [Green Version]
- Du, J.Y.; Chowdhury, M.; Rahman, M.; Dey, K.; Apon, A.; Luckow, A.; Ngo, L.B. A Distributed Message Delivery Infrastructure for Connected Vehicle Technology Applications. IEEE Trans. Inte. Tran. Sys. Veh. Tech. 2018, 19, 787–801. [Google Scholar] [CrossRef]
- Zeng, L.; Zhang, J.; Han, Q.; Ye, L.; He, Q.; Zhang, X.; Yang, T. A Bus-Oriented Mobile FCNs Infrastructure and Intra-Cluster BSM Transmission Mechanism. IEEE Multi. Open Acc. J. Spe. Sec. Adv. Big. Dat. Ana. For. Veh. Soc. Net. 2019, 7, 24308–24320. [Google Scholar] [CrossRef]
- Wang, X.; Wang, Z.; Cai, S. Data delivery in vehicular named data networking. IEEE Netw. Lett. 2020, 14, 120–123. [Google Scholar] [CrossRef]
- Daniel, A.; Subburathinam, K.; Paul, A.; Rajkumar, N.; Rho, S. Big autonomous vehicular data classifications: Towards procuring intelligence in ITS. Veh. Commun. 2017, 9, 306–312. [Google Scholar] [CrossRef]
- Guerreiro, G.; Figueiras, P.; Silva, R.; Costa, R.; Jardim-Goncalves, R. An architecture for big data processing on intelligent transportation systems. An application scenario on highway traffic flows. In Proceedings of the 2016 IEEE 8th International Conference on Intelligent Systems (IS), Sofia, Bulgaria, 4–6 September 2016; pp. 65–72. [Google Scholar]
- Adoni, W.Y.H.; Nahhal, T.; Aghezzaf, B.; Elbyed, A. The mapreduce-based approach to improve vehicle controls on big traffic events. Int. Col. Log. Sup. Cha. Man 2017, 68, 1–6. [Google Scholar]
- Cheng, N.; Lyu, F.; Chen, J.; Xu, W.; Zhou, H.; Zhang, S.; Shen, X. Big Data Driven Vehicular Networks. IEEE Net. 2018, 32, 160–167. [Google Scholar] [CrossRef] [Green Version]
- Javed, M.A.; Zeadally, S.; Hamida, E.B. Data analytics for Cooperative Intelligent Transport Systems. Veh. Commun. 2019, 15, 67–72. [Google Scholar] [CrossRef]
- Tong, W.; Hussain, A.; Bo, W.X.; Maharjan, S. Artificial intelligence for vehicleto-everything: A survey. IEEE Access 2019, 7, 10823–10843. [Google Scholar] [CrossRef]
- Standard J3016: Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles J3016_202104. SAE Int. Stan. Doc. 2021. [CrossRef]
- Raza, S.; Wang, S.; Ahmed, M.; Anwar, M.R. A Survey on Vehicular Edge Computing: Architecture, Applications, Technical Issues, and Future Directions. Wirel. Commun. Mob. Comput. 2019, 2019, 3159762. [Google Scholar] [CrossRef]
- Liu, L.; Chen, C.; Pei, Q.; Maharjan, S.; Zhang, Y. Vehicular Edge Computing and Networking: A Survey. Mob. Net. Appl. 2020. [Google Scholar] [CrossRef]
- Standard J2735: Dedicated Short Range Communications Message Set Dictionary. Version 3-2016. SAE Int. Tec. Rep. 2016. Available online: https://www.sae.org/standards/content/j2735_201603/ (accessed on 1 May 2021).
- Connected Vehicle Safety Pilot Model Deployment (SPMD). Available online: https://www.its.dot.gov/research_archives/safety/aacvte.htm (accessed on 1 May 2021).
- Abadi, D.J.; Madden, S.R.; Hachem, N. Column-stores vs. row-stores: How different are they really? In Proceedings of the SIGMOD/PODS ’08—International Conference on Management of Data, Vancouver, BC, Canada, 9–12 June 2008; pp. 967–980. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Citations | Perspective | Data Source | Data Management | Hardware Resources | |
|---|---|---|---|---|---|
| Tasks | Study Case | ||||
| [17] | Data Collection | Trajectory data | Not Considered | Not Considered | |
| [18] | Data Collection | Trajectory data | Not Considered | Not Considered | |
| [19] | Data Collection | Trajectory data | Not Considered | Not Considered | |
| [20] | Data Collection | Trajectory data | Not Considered | Not Considered | |
| [22] | Data Sharing | BSMs | Not Considered | Not Considered | |
| [23] | Data Sharing | Not specified | Not Considered | Not Considered | |
| [28] | Data Analytics | RSU data | Not Considered | Not Considered | |
| [21] | Data Sharing | Traffic-related and non-traffic-related data | Storage, Processing | Message delivery platform | Two computing platforms (Out of vehicle) |
| [24] | Data Analytics | KITTI vision Benchmark Dataset | Storage, Processing | Big Data Classification | External server (Out of vehicle) |
| [25] | Data Analytics | Highway traffic data | Storage, Processing | Traffic prediction services | Worker node |
| [26] | Data Analytics | Large-scale traffic data | Storage, Processing | Driver behavior analyzing | Hardware cluster of 4 nodes (Out of vehicle) |
| [27] | Data Analytics | OBU data | Storage, Processing | Detecting negative communicationconditions | Cloud |
| CPU | Dual Intel Xeon Gold 6258R 2.7 GHz base frequency 28 cores. (Intel, Santa Clara, California, USA) |
| Memory | 768 GB of 2933 MHz DDR4 ECC Memory |
| Storage | Dual 8 TB NVMe M.2 Solid-State Drive + 8 18 TB 7200 RPM SATA 3.5 Hard Drive |
| GPU | NVIDIA Quadro RTX A6000 48 GB (NVIDIA, Santa Clara, CA, USA |
| Network interfaces | Intel i350-T4, Quad-Port, 1 Gb Ethernet Network Adapter (Intel, Santa Clara, CA, USA) Intel AX200 Wi-Fi 6 (Intel, Santa Clara, CA, USA) + Bluetooth 5.0 PCIe Card |
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 | 19 | 20 | 21 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 09 | 2 | 36 | −93 | 80 | 09 | −27 | 51 | 0 × F | 7 | 176 | 70 | 27 | 16 | 11 | 45 | 46 | 0 | 0 | 0 | 0 |
| 17 | 2 | 12 | 66 | 0 | 42 | −28 | 43 | 0 × F | 7 | 0 | 31 | 27 | −1 | −1 | 43 | 0 | 0 | 0 | 0 | 0 |
| 23 | 2 | 10 | −40 | 90 | 24 | −41 | 40 | 0 × F | 7 | 81 | 58 | 27 | 30 | 1 | 42 | 9 | 0 | 0 | 0 | 0 |
| 30 | 2 | 12 | 66 | 10 | 43 | −28 | 43 | 0 × F | 7 | 0 | 31 | 27 | −1 | −1 | 43 | 0 | 0 | 0 | 0 | 0 |
| 39 | 2 | 11 | −40 | 0 | 79 | −40 | 40 | 0 × F | 7 | 83 | 58 | 27 | 30 | 1 | 42 | 9 | 0 | 0 | 0 | 0 |
| 47 | 2 | 38 | −93 | 0 | 56 | −27 | 51 | 0 × F | 7 | 74 | 70 | 27 | −15 | 7 | 45 | 33 | 0 | 0 | 0 | 0 |
| 55 | 2 | 0 | 66 | 20 | 41 | −28 | 43 | 0 × F | 7 | 0 | 31 | 27 | −3 | −1 | 43 | 0 | 0 | 0 | 0 | 0 |
| 64 | 2 | 1 | 66 | 30 | 41 | −28 | 43 | 0 × F | 7 | 0 | 31 | 27 | −3 | −1 | 43 | 0 | 0 | 0 | 0 | 0 |
| 74 | 2 | 2 | 66 | 40 | 41 | −28 | 43 | 0 × F | 7 | 0 | 31 | 27 | −1 | −1 | 43 | 0 | 0 | 0 | 0 | 0 |
| 83 | 2 | 41 | −93 | 00 | 26 | −28 | 51 | 0 × F | 7 | 73 | 70 | 27 | −9 | 7 | 45 | 30 | 0 | 0 | 0 | 0 |
| Data Element | Every Ten Seconds | ||||
|---|---|---|---|---|---|
| 1 | 2 | ... | 19 | 20 | |
| Position (Lat, Long, Elev) | N | N | ... | N | N |
| TemporaryID | N | No change | N | ||
| Positional Accuracy | N | No change | N | ||
| TrasmissionState | N | No change | N | ||
| Brake System Status | N | No change | N | ||
| VehicleSize | N | No change | N | ||
| Speed | N | Slight change | N | ||
| Heading | N | Slight change | N | ||
| SteeringWheelAngle | N | Slight change | N | ||
| AccelerationSet4Way | N | Slight change | N | ||
| Type of Vehicle | Velocity (mph) | Flow | ||||||
|---|---|---|---|---|---|---|---|---|
| SD | Max | Min | Mean | SD | Max | Min | Mean | |
| Commercial vehicles | 1.07 | 21.01 | 19.21 | 20.22 | 7.00 | 34.10 | 4.10 | 12.14 |
| Bus | 1.08 | 29.97 | 27.58 | 20.85 | 2.96 | 21.00 | 3.01 | 9.70 |
| Traveler car | 2.00 | 51.56 | 47.80 | 49.53 | 5.17 | 62.11 | 40.10 | 45.40 |
| No. | Characteristic | Abbreviation | Sensibility |
|---|---|---|---|
| 1 | Date | D | 2.4198 |
| 2 | Time | T | 1.5112 |
| 3 | Number of Commercial Vehicles | NCV | 0.7001 |
| 4 | Number of Bus | NB | 0.7998 |
| M | HD | HN | TF | E | L | S/M | TR | CV | TE | R (%) | ||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| MSE | MSE | NMSE ( × 10 ) | MAE ( × 10) | |||||||||||
| Min ( × 10 ) | Final ( × 10 ) | Min ( × 10 ) | Final ( × 10 ) | |||||||||||
| M1 | 1 | 3 | Sigmoid | 300 | Le | − | 5.01 | 5.01 | 17.11 | 17.11 | 197.22 | 70.02 | 111.25 | 85.17 |
| M2 | 1 | 4 | Sigmoid | 400 | Mo | 1/0.8 | 4.74 | 4.74 | 11.73 | 11.73 | 129.45 | 57.25 | 85.15 | 92.01 |
| M3 | 1 | 6 | Sigmoid | 700 | Mo | 1/0.8 | 3.01 | 3.01 | 4.15 | 4.15 | 57.04 | 16.98 | 48.75 | 96.82 |
| M4 | 1 | 3 | Tanh Axon | 400 | Le | − | 0.15 | 0.16 | 0.14 | 0.14 | 0.72 | 0.23 | 5.99 | 99.79 |
| M5 | 1 | 4 | Tanh Axon | 500 | Le | − | 0.45 | 0.45 | 0.5 | 0.50 | 2.71 | 0.71 | 11 | 99.63 |
| M6 | 1 | 5 | Tanh Axon | 600 | Mo | 1/0.8 | 0.63 | 0.64 | 0.82 | 0.95 | 2.7 | 0.78 | 12.8 | 99.56 |
| R | RMES | SD | MAE | X2 Calculated | X2 Tabulated |
|---|---|---|---|---|---|
| 0.9979 | 0.8699 | 0.8682 | 0.6801 | 4.9711 | 139.571 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Benaissa, K.; Bitam, S.; Mellouk, A. On-Board Data Management Layer: Connected Vehicle as Data Platform. Electronics 2021, 10, 1810. https://doi.org/10.3390/electronics10151810
Benaissa K, Bitam S, Mellouk A. On-Board Data Management Layer: Connected Vehicle as Data Platform. Electronics. 2021; 10(15):1810. https://doi.org/10.3390/electronics10151810
Chicago/Turabian StyleBenaissa, Khireddine, Salim Bitam, and Abdelhamid Mellouk. 2021. "On-Board Data Management Layer: Connected Vehicle as Data Platform" Electronics 10, no. 15: 1810. https://doi.org/10.3390/electronics10151810
APA StyleBenaissa, K., Bitam, S., & Mellouk, A. (2021). On-Board Data Management Layer: Connected Vehicle as Data Platform. Electronics, 10(15), 1810. https://doi.org/10.3390/electronics10151810