
Synchronous Generator Rectification System Based on Double Closed-Loop Control of Backstepping and Sliding Mode Variable Structure



Abstract
:1. Introduction
- (1)
- The asymptotically stable nonlinear controller is designed using the backstepping control method for the single-input single-output (SISO) model of the active component control structure. The reactive component control structure is uncomplicated and it does not reflect the advantages of the backstepping control method, so this paper uses the sliding mode variable structure (SMVS) to improve it.
- (2)
- The rectification system can realize low-voltage and high-current DC power generation and high-power output;
- (3)
- The rectification system achieves better dynamic and static performance, improves responsiveness and robustness, and maintains the high power factor operation after load mutation.
2. Methods
2.1. Active Component Control Structure
2.2. Reactive Component Control Structure
3. Results
3.1. Active Component Control Structure
3.2. Reactive Component Control Structure
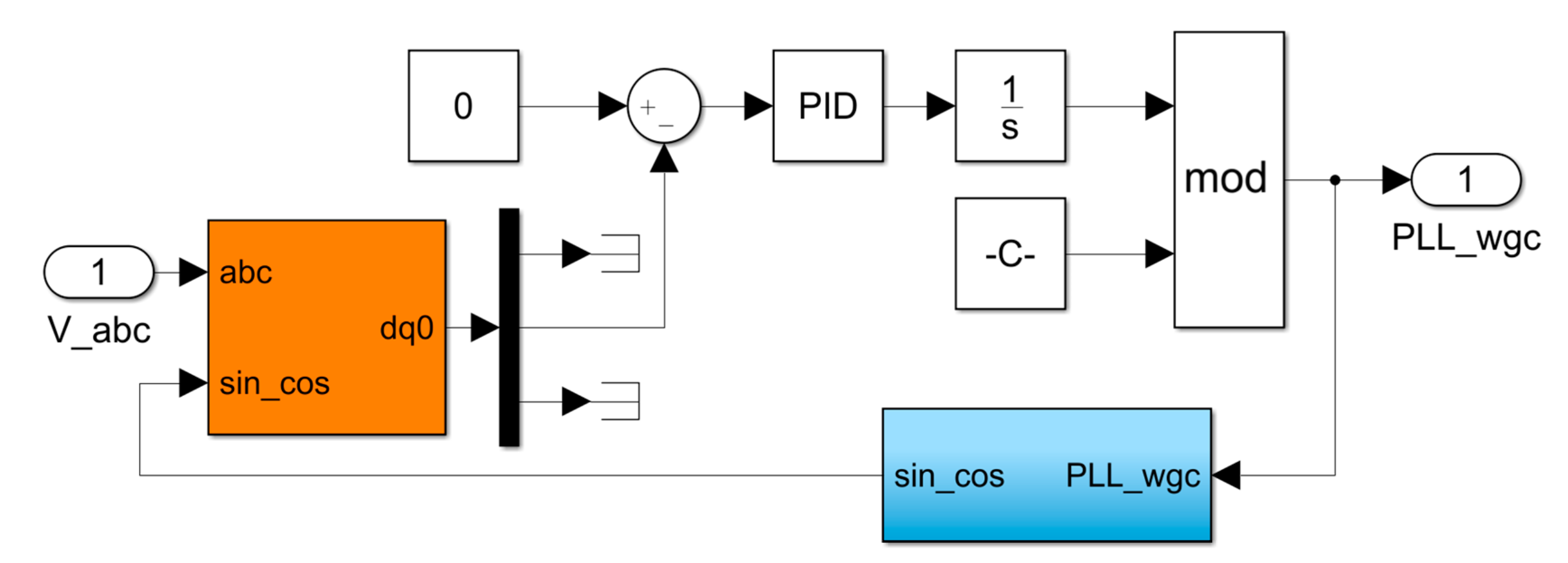
3.3. Phase Locked Loop
3.4. Simulation Waveform Comparison and Analysis
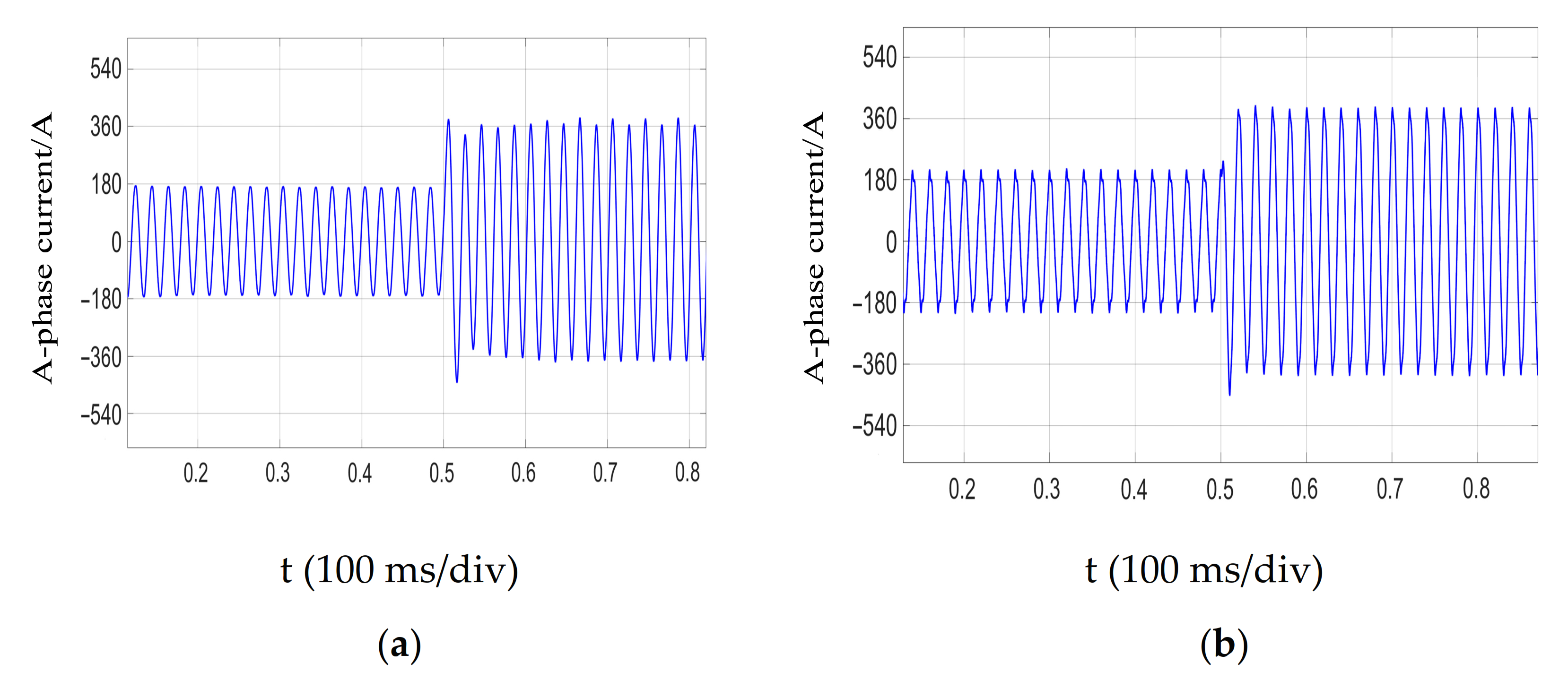
3.4.1. Startup Characteristics
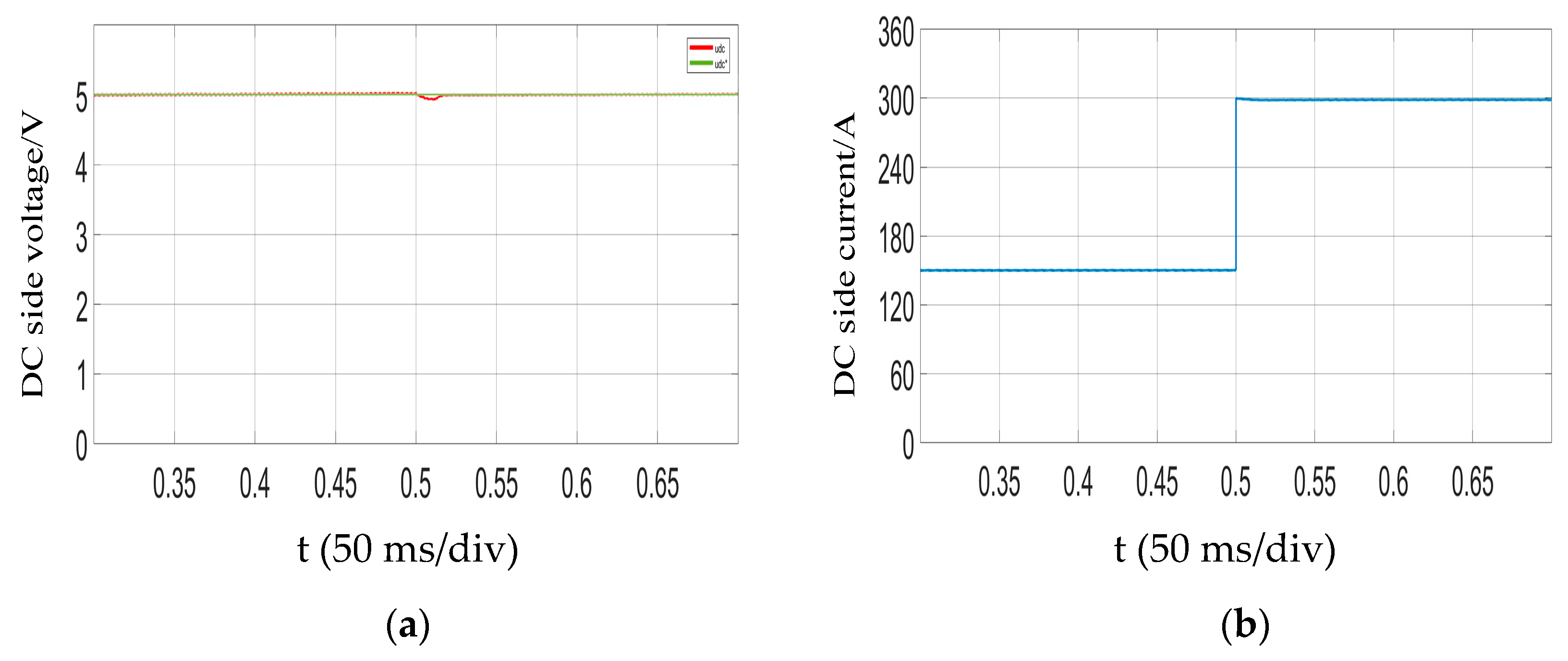
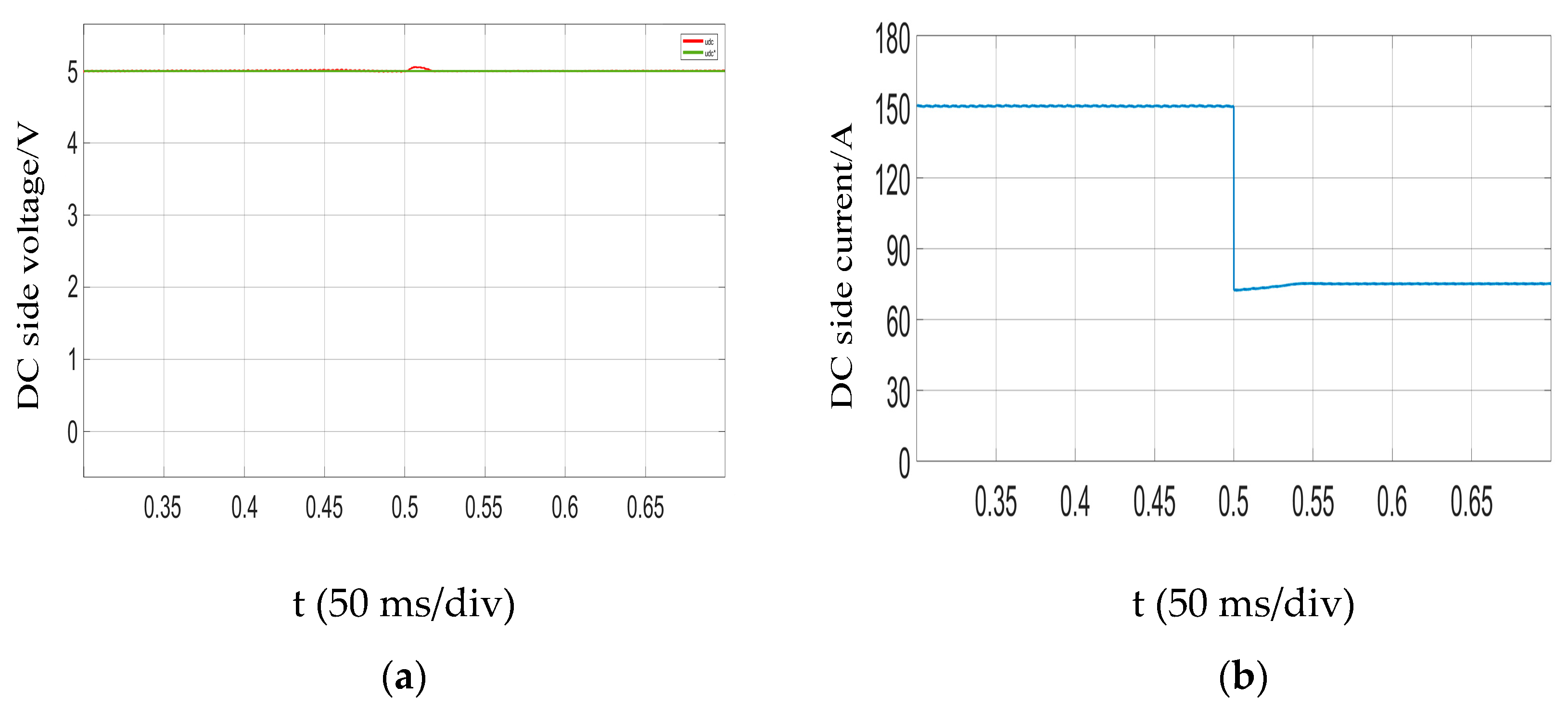
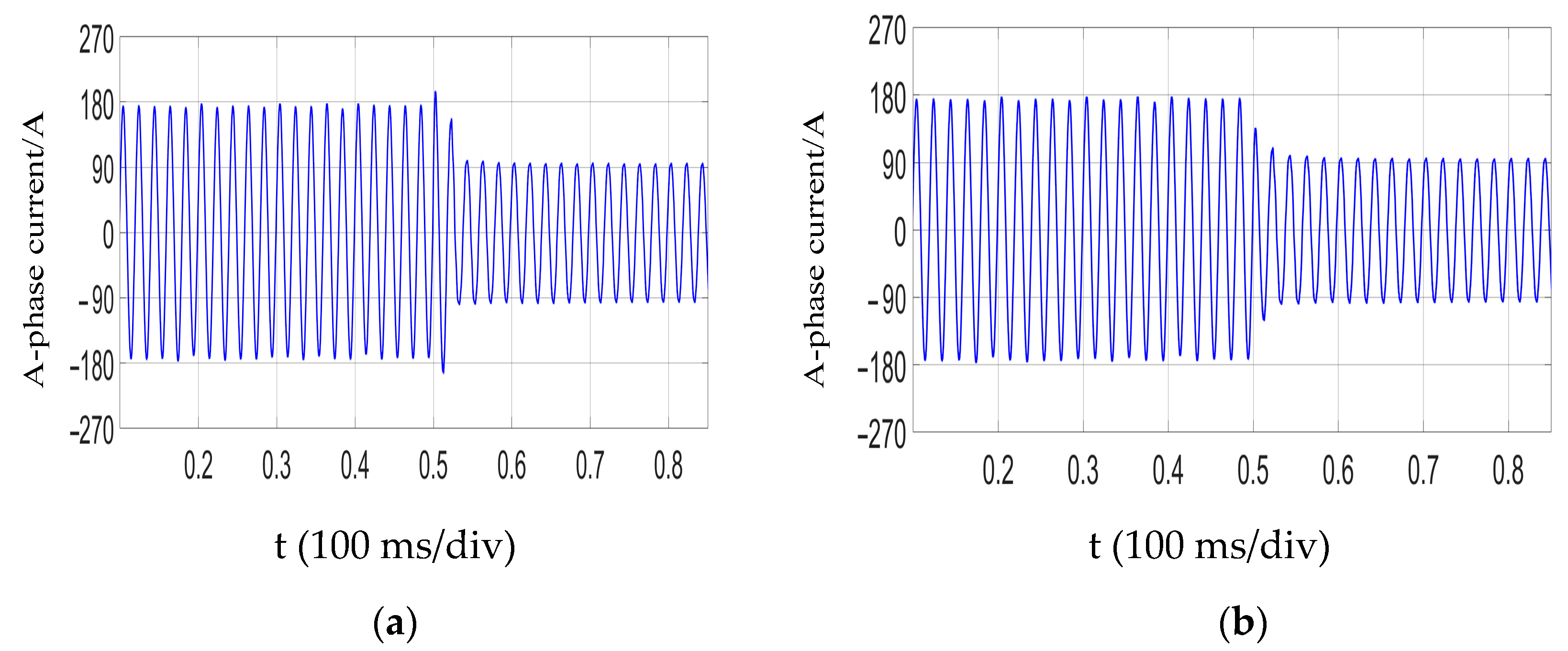
3.4.2. Load Mutation
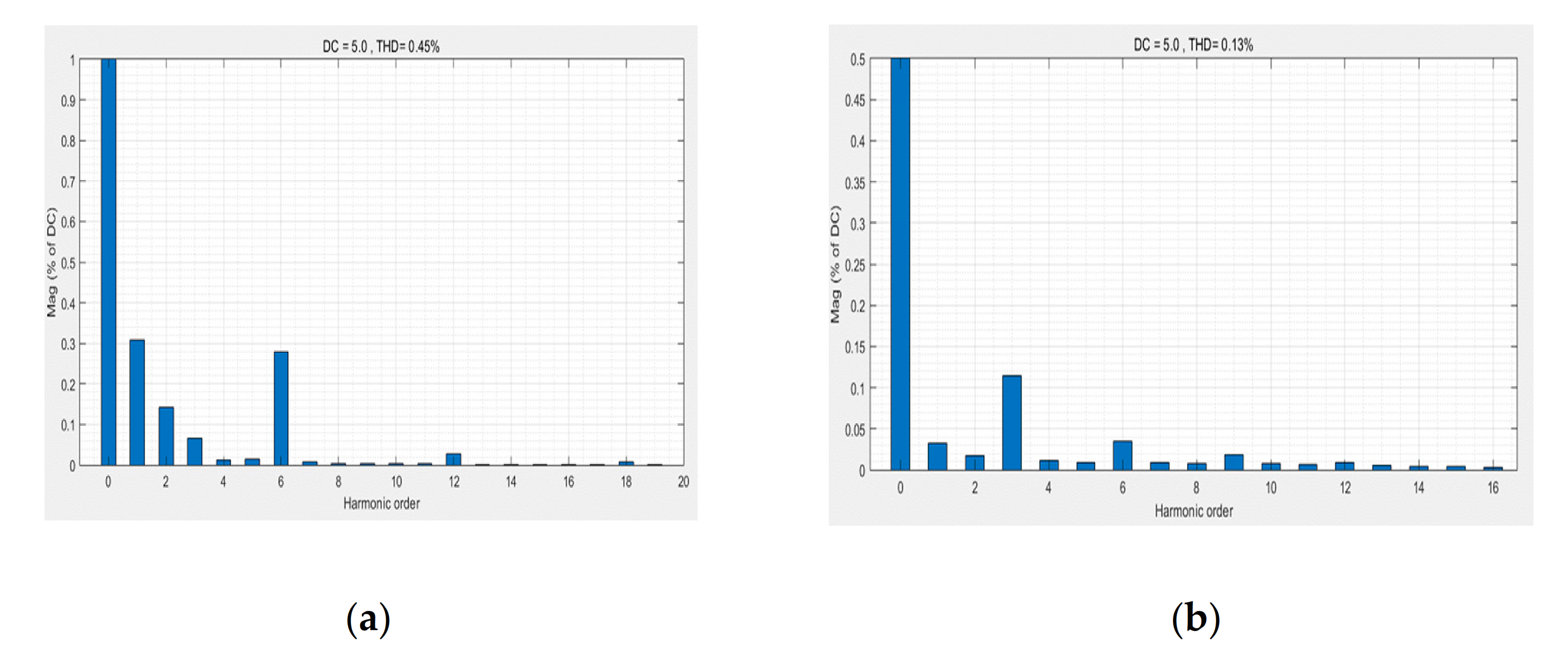
3.4.3. Comparative Simulation Analysis
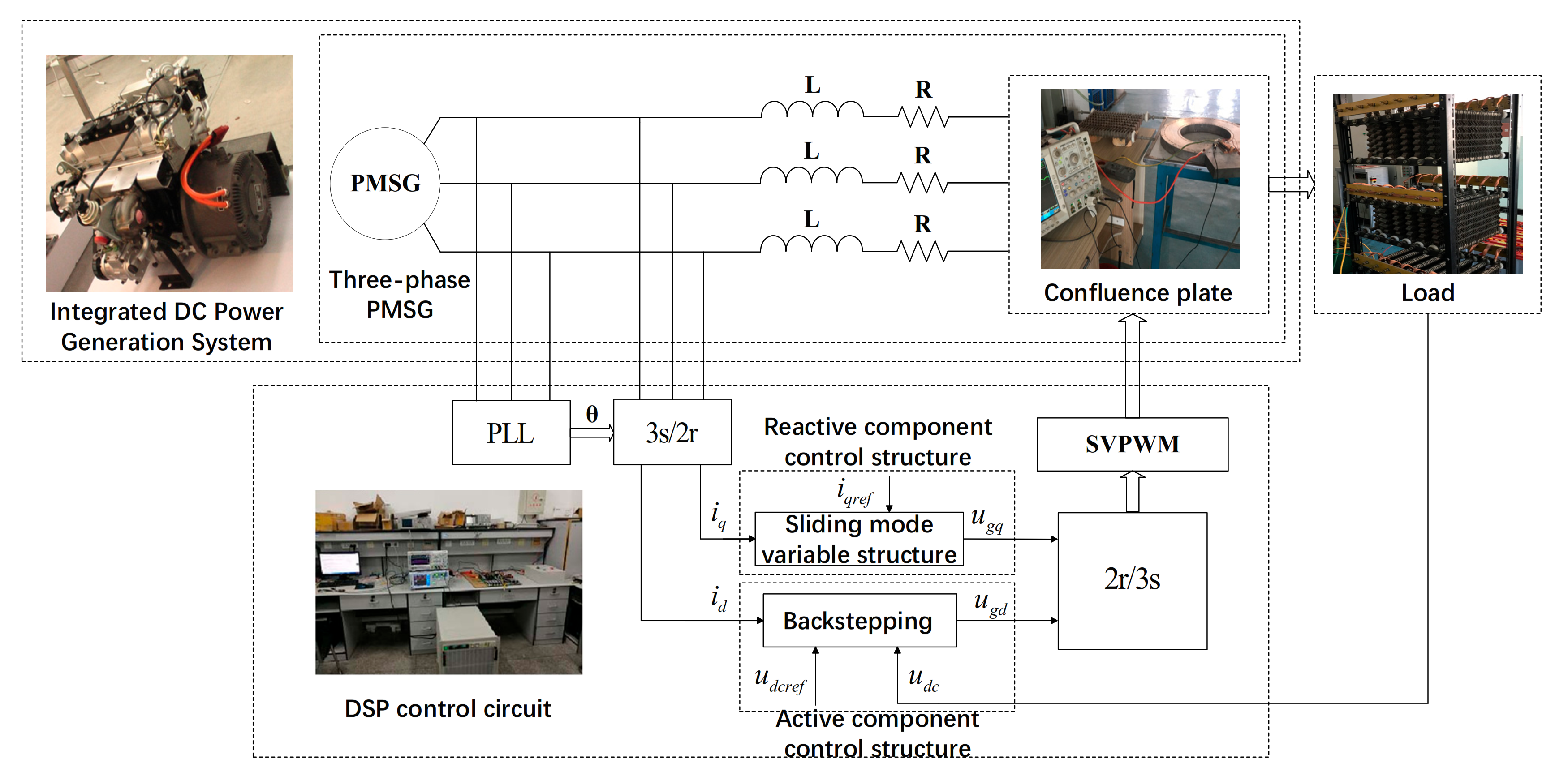
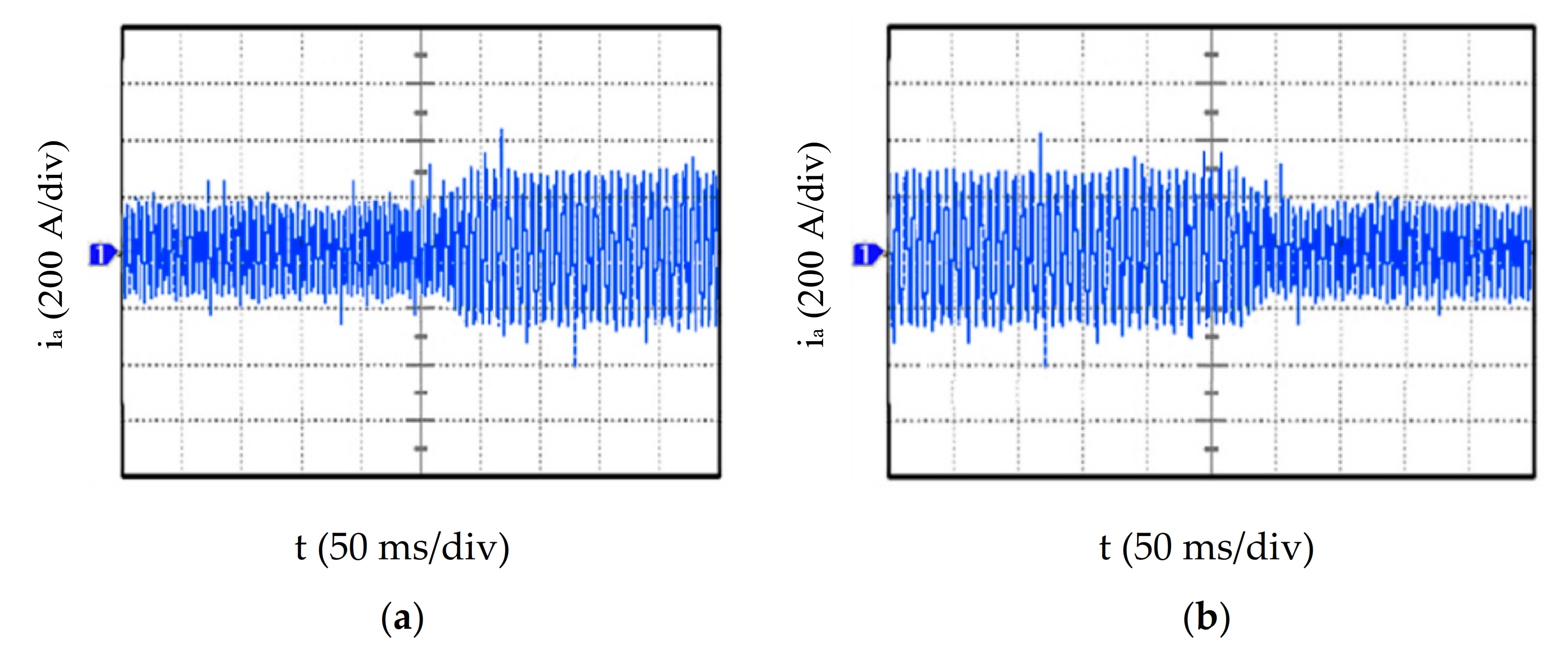
3.5. Verification of the Experimental Result
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Zhang, P.H.; Yang, G.J.; Li, T.C. Direct voltage control of three phase PWM rectifier based on feedback linearization. Proc. CSEE 2010, 30, 39–46. [Google Scholar]
- Gensior, A.; Sira-Ramirez, H.; Rudolph, J.; Guldner, H. On Some Nonlinear Current Controllers for Three-Phase Boost Rectifiers. IEEE Trans. Ind. Electron. 2009, 56, 360–370. [Google Scholar] [CrossRef]
- Eltoum, M.M.; Al-Mahzamah, F.; El Ferik, S. Feedback Linearization Sliding Mode Control of Three-Phase Grid-tied AC/DC PWM Converter. In Proceedings of the 2020 17th International Multi-Conference on Systems, Signals & Devices (SSD), Monastir, Tunisia, 20–23 July 2020; pp. 1116–1121. [Google Scholar]
- Bouafia, A.; Krim, F.; Gaubert, J.-P. Fuzzy-Logic-Based Switching State Selection for Direct Power Control of Three-Phase PWM Rectifier. IEEE Trans. Ind. Electron. 2009, 56, 1984–1992. [Google Scholar] [CrossRef]
- Ge, J.; Zhao, Z.; Yuan, L.; Lu, T.; He, F. Direct Power Control Based on Natural Switching Surface for Three-Phase PWM Rectifiers. IEEE Trans. Power Electron. 2015, 30, 2918–2922. [Google Scholar] [CrossRef]
- Malinowski, M.; Kazmierkowski, M.P.; Hansen, S.; Blaabjerg, F.; Marques, G. Virtual flux based direct power control of three-phase PWM rectifiers. In Proceedings of the Thirty-Fifth IAS Annual Meeting and World Conference on Industrial Applications of Electrical Energy, Rome, Italy, 8–12 October 2000; pp. 2369–2375. [Google Scholar]
- Wan, C.; Huang, M.; Tse, C.K.; Wong, S.C.; Ruan, X. Nonlinear Behavior and Instability in a Three-Phase Boost Rectifier Connected to a Nonideal Power Grid with an Interacting Load. IEEE Trans. Power Electron. 2012, 28, 3255–3265. [Google Scholar] [CrossRef]
- Allag, A.; Hammoudi, M.Y.; Mimoune, S.M.; Ayad, M.Y.; Becherif, M.; Miraoui, A. Tracking control via adaptive backstepping approach for a three phase PWM AC-DC converter. In Proceedings of the 2007 IEEE International Symposium on Industrial Electronics, Vigo, Spain, 4–7 June 2007; pp. 371–376. [Google Scholar]
- Geetha, N.; Parvathy, S.; Thampatty, K.C.S. Output voltage regulation of controlled rectifiers using feedback linearization control algorithm. In Proceedings of the 2017 IEEE International Conference on Signal Processing, Informatics, Communication and Energy Systems (SPICES), Kollam, India, 8–10 August 2017; pp. 1–7. [Google Scholar]
- Li, M.H. Modeling method of three-phase voltage mode PWM rectifier. Electron. Sci. Technol. 2016, 5, 121–123. [Google Scholar]
- Parsa, A.; Monfared, S.B.; Kalhor, A. Backstepping Control based on Sliding Mode for Station-Keeping of Stratospheric Airship. In Proceedings of the 2018 6th RSI International Conference on Robotics and Mechatronics (IcRoM), Tehran, Iran, 23–25 October 2018; pp. 554–559. [Google Scholar]
- Chen, Z.Y.; Chen, Y.R. Design of fast response Buck Controller Based on backstepping method. Power Electron. 2020, 54, 102–104. [Google Scholar]
- Dong, F.B.; Zhong, Y.R. Application of backstepping method in the control of three-phase voltage-based pulse-width inverter. Control Theory Appl. 2012, 29, 928–932. [Google Scholar]
- El-Sousy, F.F.M.; El-Naggar, M.F.; Amin, M.; Abu-Siada, A.; Abuhasel, K.A. Robust Adaptive Neural-Network Backstepping Control Design for High-Speed Permanent-Magnet Synchronous Motor Drives: Theory and Experiments. IEEE Access 2019, 7, 99327–99348. [Google Scholar] [CrossRef]
- Patel, R.; Hafiz, F.; Swain, A.; Ukil, A. Nonlinear Excitation Control of Diesel Generator: A Command Filter Backstepping Approach. IEEE Trans. Ind. Inform. 2021, 17, 4809–4817. [Google Scholar] [CrossRef]
- Kamal, T.; Karabacak, M.; Kilic, F.; Blaabjerg, F.; Fernández-Ramírez, L.M. Fast Adaptive Robust Differentiator Based Robust-Adaptive Control of Grid-Tied Inverters with a New L Filter Design Method. Energies 2020, 13, 360. [Google Scholar] [CrossRef] [Green Version]
- Siffat, S.A.; Ahmad, I.; Rahman, A.U.; Islam, Y. Robust Integral Backstepping Control for Unified Model of Hybrid Electric Vehicles. IEEE Access 2020, 8, 49038–49052. [Google Scholar] [CrossRef]
- Wai, R.; Yang, Y.; Wang, Y. Design of Backstepping Direct Power Control for Three-Phase PWM Rectifier. IEEE Trans. Ind. Appl. 2019, 55, 3160–3173. [Google Scholar] [CrossRef]
- Yang, P.Z.; Zhang, X.H.; Chen, H.J. Quasi linearization of three phase voltage source PWM rectifier model. Trans. China Electrotech. Soc. 2007, 22, 28–35. [Google Scholar]
- Zhu, X.R.; Li, H.M.; Peng, Y.L.; Shi, X.C. Control strategy of current source PWM rectifier based on backstep-ping method. Trans. China Electrotech. Soc. 2007, 22, 78–82. [Google Scholar]
- Krstic, M.; Kanellakopoulos, I.; Kokotovic, P. Nonlinear design of adaptive controllers for linear systems. IEEE Trans. Autom. Control 1994, 39, 738–752. [Google Scholar] [CrossRef] [Green Version]
- Din, W.U.; Zeb, K.; Ishfaq, M.; Islam, S.U.; Khan, I.; Kim, H.J. Control of Internal Dynamics of Grid-Connected Modular Multilevel Converter Using an Integral Backstepping Controller. Electronics 2019, 8, 456. [Google Scholar] [CrossRef] [Green Version]
- Bouchareb, H.; Semcheddine, S. Sliding mode observer for the synchronous machine with permanent magnets. In Proceedings of the 3rd International Conference on Systems and Control, Algiers, Algeria, 29–31 October 2013; pp. 786–791. [Google Scholar]
- D’Amato, G.; Avitabile, G.; Coviello, G.; Talarico, C. DDS-PLL Phase Shifter Architectures for Phased Arrays: Theory and Techniques. IEEE Access 2019, 7, 19461–19470. [Google Scholar] [CrossRef]
- Zheng, B.-C.; Fei, S.; Liu, X. Event-Triggered and Memory-Based Sliding Mode Variable Structure Control for Memristive Systems. Electronics 2018, 7, 253. [Google Scholar] [CrossRef] [Green Version]
- Lin, H.; Yan, W.; Wang, Y.; Gao, B.; Yao, Y. Nonlinear sliding mode speed control of a PM synchronous motor drive using model reference adaptive backstepping approach. In Proceedings of the 2009 International Conference on Mechatronics and Automation, Changchun, China, 9–12 August 2009; pp. 828–833. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Three-phase input line voltage, e | 3.8 V |
| Three-phase input voltage frequency, f | 50 Hz |
| Switching frequency | 20 kHz |
| direct current (DC) side capacitance, C | 2200 uF |
| DC side voltage, udc | 5 V |
| AC side equivalent inductance, L | 1.5 mH |
| AC side equivalent resistance, R | 0.25 Ω |
| Load, RL | 30 Ω |
| The active component structure parameters k1, k2, k3 | 0, 200, 20 |
| The reactive component structure parameters ε, k | 13.5, 160 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, J.; Qu, X.; Iu, H.H.-C. Synchronous Generator Rectification System Based on Double Closed-Loop Control of Backstepping and Sliding Mode Variable Structure. Electronics 2021, 10, 1832. https://doi.org/10.3390/electronics10151832
Liu J, Qu X, Iu HH-C. Synchronous Generator Rectification System Based on Double Closed-Loop Control of Backstepping and Sliding Mode Variable Structure. Electronics. 2021; 10(15):1832. https://doi.org/10.3390/electronics10151832
Chicago/Turabian StyleLiu, Jinfeng, Xin Qu, and Herbert Ho-Ching Iu. 2021. "Synchronous Generator Rectification System Based on Double Closed-Loop Control of Backstepping and Sliding Mode Variable Structure" Electronics 10, no. 15: 1832. https://doi.org/10.3390/electronics10151832
APA StyleLiu, J., Qu, X., & Iu, H. H. -C. (2021). Synchronous Generator Rectification System Based on Double Closed-Loop Control of Backstepping and Sliding Mode Variable Structure. Electronics, 10(15), 1832. https://doi.org/10.3390/electronics10151832