1. Introduction
Currently, mainstream power supplies on the market are designed and developed using high-frequency switching technologies to achieve compactness and high performance. However, power switching is affected by nonlinear resistance, which leads to harmonic pollution of electrical devices and even increases the loss of transmission lines [
1]. Therefore, the International Electrotechnical Commission (IEC) stipulated relevant standards for power harmonics such as the IEC 61000-3-2 standard [
2].
In order for the problem of harmonic pollution to be solved, the active power factor correction (PFC) technique is the most suitable method because it increases the input power factor (PF) and reduces input current harmonic distortion [
3]. Common current mode control methods include peak current control and average current control methods. Because the peak current control method is likely to be affected by noise [
4] and requires slope compensation [
5], the average current control method is extensively applied in switching power supply industries. As shown in
Figure 1, the average current control method features current and voltage control loops [
6,
7]. The current control loop controls the phase difference between input current and voltages, whereas the voltage control loop regulates the direct current (DC) output voltage. Both control loops contain twice-line frequency ripples; therefore, the input currents generate second harmonic distortion. The increase in the ripple voltage increases input current harmonic distortion (total harmonic distortion; THDi). Commonly, to reduce the second harmonic effect, the voltage and current loop bandwidth are limited. However, this design drags the system transient response. In applications for light-emitting diode drivers or adapters, fast dynamic responses must be considered because, when load currents change, the output voltage frequently generates oscillation.
To achieve THDi with a fast dynamic response and reduced input current, researchers have proposed many methods [
8,
9,
10,
11,
12,
13,
14]. Studies [
8,
9,
10] have adopted a two-stage scheme, with the front-end and back-end schemes serving to reduce THDi and improve transient responses, respectively. In addition, increasing additional circuits in the control loop is an effective improvement method. For example, the studies [
11,
12,
13] used a sample-and-hold (S/H) circuit to sample output feedback voltage at the zero crossing point of input voltage. Digital control technologies are other common solutions [
5,
14,
15,
16,
17] because digital controllers have the advantages of accurate time control and easily increased system flexibility. For example, the average sliding control technique can be used to determine the relationship between the sliding surface and the input voltage and current and to further reduce input current harmonics [
17,
18,
19,
20]. The digital signal processors can be used as the control core and combined with the reference commands provided by phase-locked loops to avoid voltage loops from being affected by twice-line frequency. Subsequently, the voltage loop bandwidth can be increased, and PFC transient responses improved [
21].
The described methods can prevent voltage loops from being affected by twice-line frequency and increase voltage loop bandwidths, addressing the defects of conventional techniques. However, the complexity of the controllers will increase, and complex algorithms and high-cost microcontrollers are required.
Moreover, one cycle control method is also a novel technique. It does not need a multiplier and the rectifying signal from input voltage; consequently, high power factor can be achieved easier with fewer components. This method will not be influenced by 120 Hz ripple from the rectified input voltage, and this benefit helps PFC to operate in wider range of the bandwidth. However, this technique requires a resettable integrator and a comparator. The switching noise will be a major concern and impact for the comparator [
22].
Therefore, in this study, a new control technique was proposed that requires only two additional digital potentiometers, two analog-to-digital converters (ADCs), and a zero-point detection circuit. When the zero-point detection circuit detected input voltage zero points, ADCs are employed to sample input voltage peaks and feedback error signals. The sampling results inform the adjustment of digital circuits to change the system loop gains and complete PFC operations. This prevents the system from being affected by twice-line frequency ripples and subsequently increased the system bandwidths. In this system, the controller requires no dividers or squarer, thereby reducing the overall circuit complexity.
This paper comprises six sections.
Section 2 illustrates the operating principles.
Section 3 explains the control circuit design.
Section 4 describes the stability analysis and compensator design.
Section 5 provides the experimental results, which were verified for the 300 W boost power PFC prototype.
Section 6 provides the conclusions of this study.
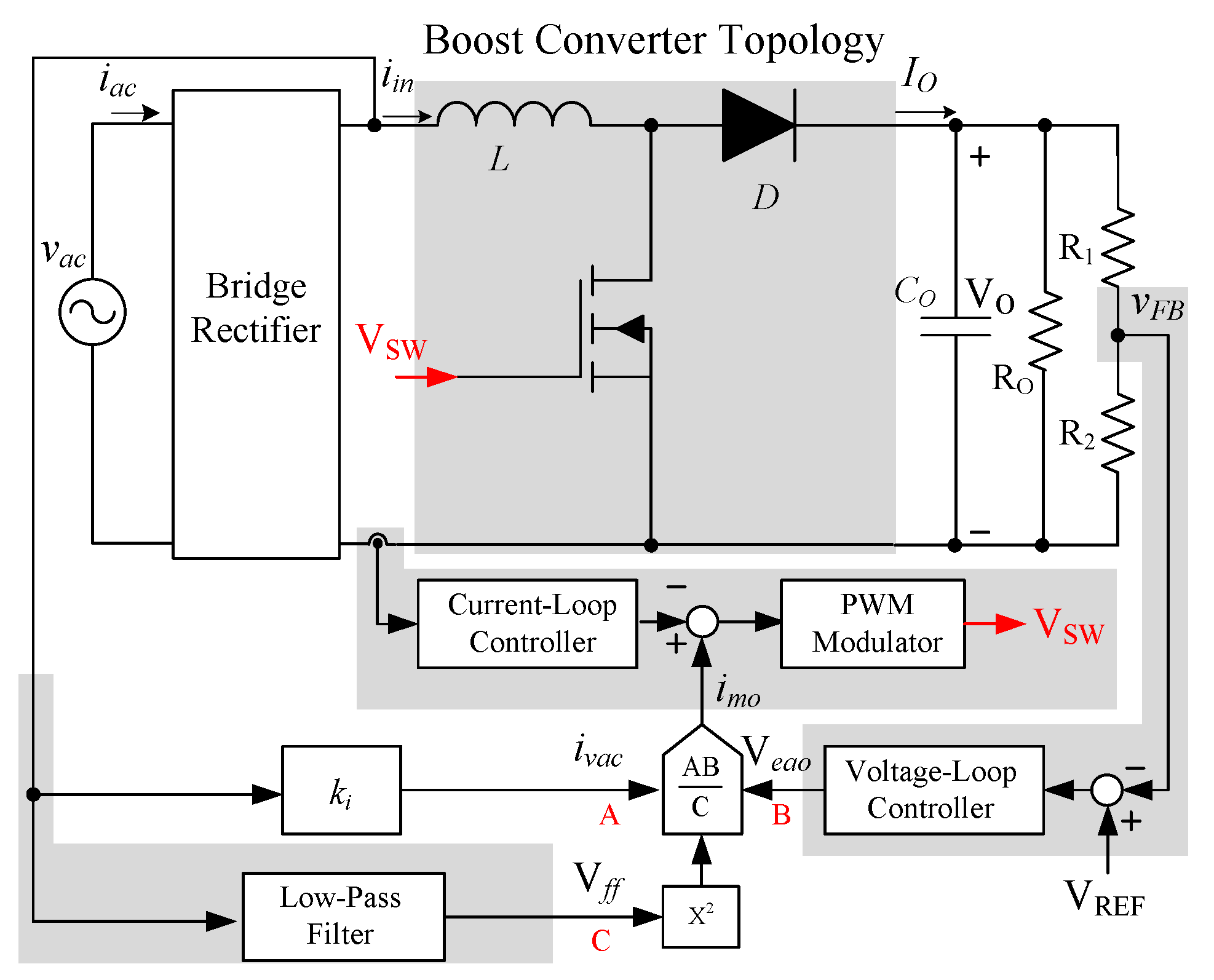
2. Description of the Proposed Scheme
Figure 1 shows the control circuit block diagram conventionally operating in the average current mode. In the circuit scheme, the boost converter is adopted. In terms of the simplification of the analysis, all components are assumed to be ideal. The current command
imo decides the waveform of the input current
iin, which is composed of three main parameters, namely, rectified input current
ivac, feedforward voltage
vFF, and feedback voltage V
eao. In a steady state, the current control command
imo can be expressed as follows:
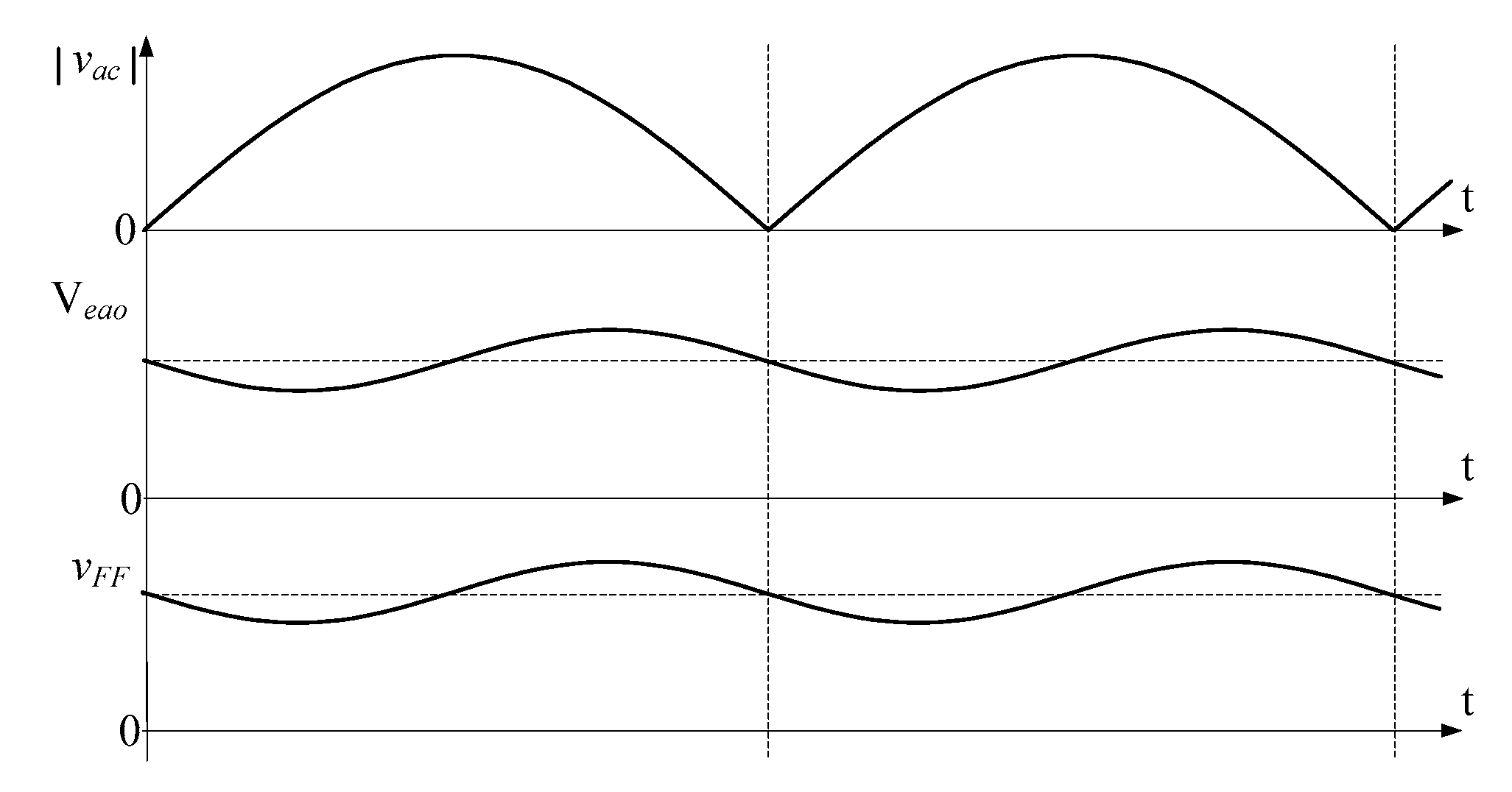
The input voltage is a sinusoidal wave rectified through a bridge full-wave rectifier, and filter capacitors are added at the feedforward loop; therefore, V
eao and
vFF simultaneously feature DC and low-frequency 120 Hz alternating current (AC) components, as shown in
Figure 2 [
21]. To avoid PFC-induced input current harmonic distortion, the conventional method uses narrow bandwidth filters to inhibit low-frequency components; however, the PFC transient response speed is limited.
Figure 2 shows that, when the input voltage
vac is at the peak or zero point, the values for the voltage error signal V
eao and the voltage feedforward signal
vFF are their respective means. Therefore, the input voltage peak and feedforward means are proportionally related. When the input voltage peak increases, the feedforward signal means increase. Conversely, when the input voltage peak decreases, the feedforward signal means decrease. In summary, the feedforward loops in this study use no filter capacitors; instead, they use peak detectors to read the feedforward signal peak voltage as the feedforward command
vFF to improve the input transient responses. For the output feedback, a 120 Hz S/H device is employed to sample the voltage error signal V
eao. This method maintains the signal V
eao at the mean value between sample intervals.
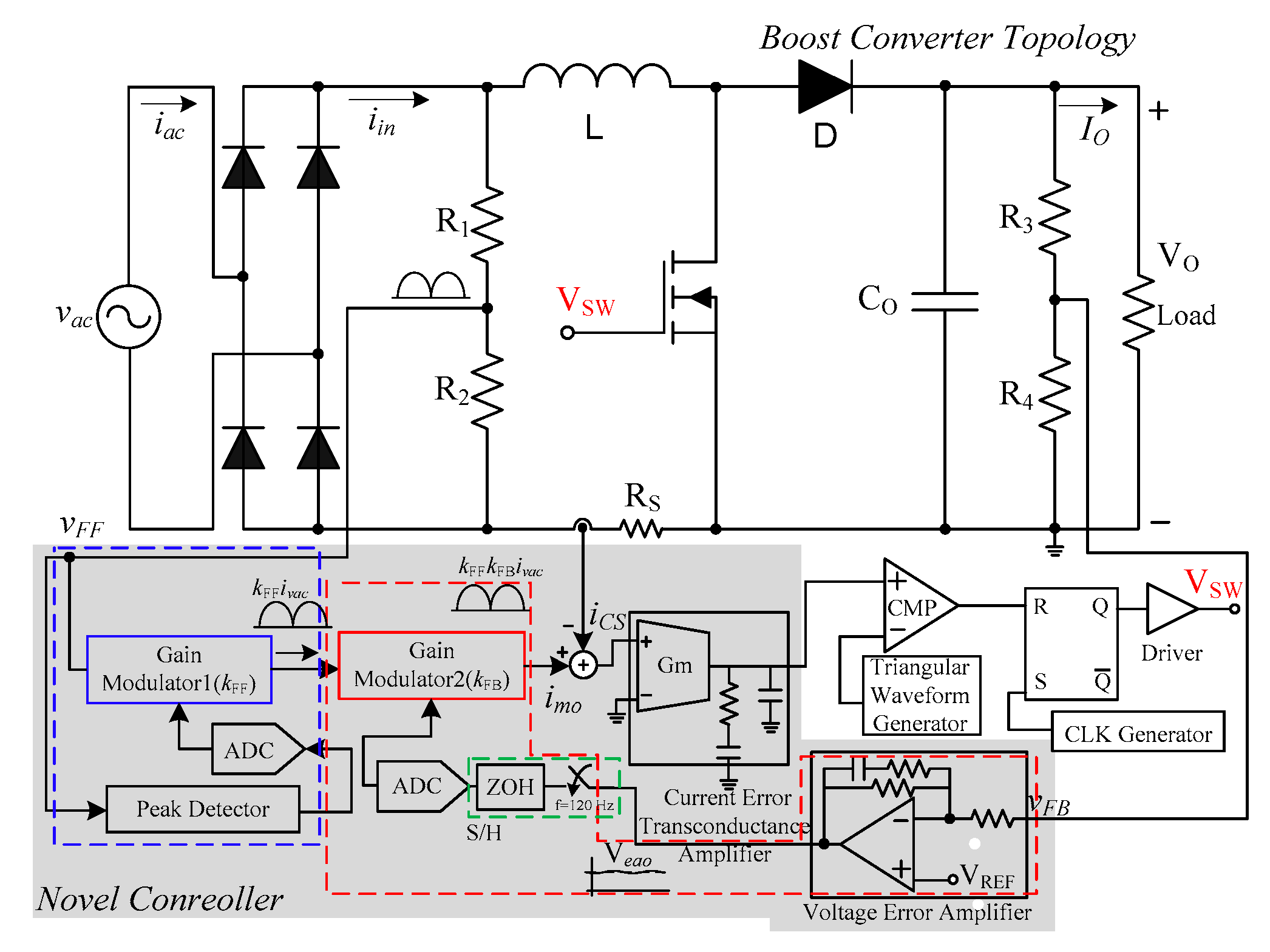
A new control scheme was proposed, as shown in
Figure 3, with two gain control circuits (
kFF,
kFB), two ADCs, a peak detector, a transconductance amplifier, and an S/H circuit. The core of the controller consists of two adjustable gain modulators, which are separately located at the feedforward loop (dotted blue line) and the voltage feedback loop (dotted red line). On the feedforward loop, the voltage
vFF is generated by the input voltage
vac through a bridge rectifier. Peak detectors sample voltage
vFF results to adjust the gain
kFF size. In addition, to eliminate the effect of output voltage ripples on voltage feedback loops, the error signals V
eao for controlling the gain
kFB size are determined by the S/H circuit with a 120-Hz sampling frequency and an ADC. Through the aforementioned analysis, the input current reference command
imo can be rewritten as follows:
where
kFF(
k) and
kFB(
k) are respectively the
kth feedforward gain and feedback gain. The comparison results of (1) and (2) reveal that, when
and
, the size of the two gains can be adequately adjusted for PFC control.
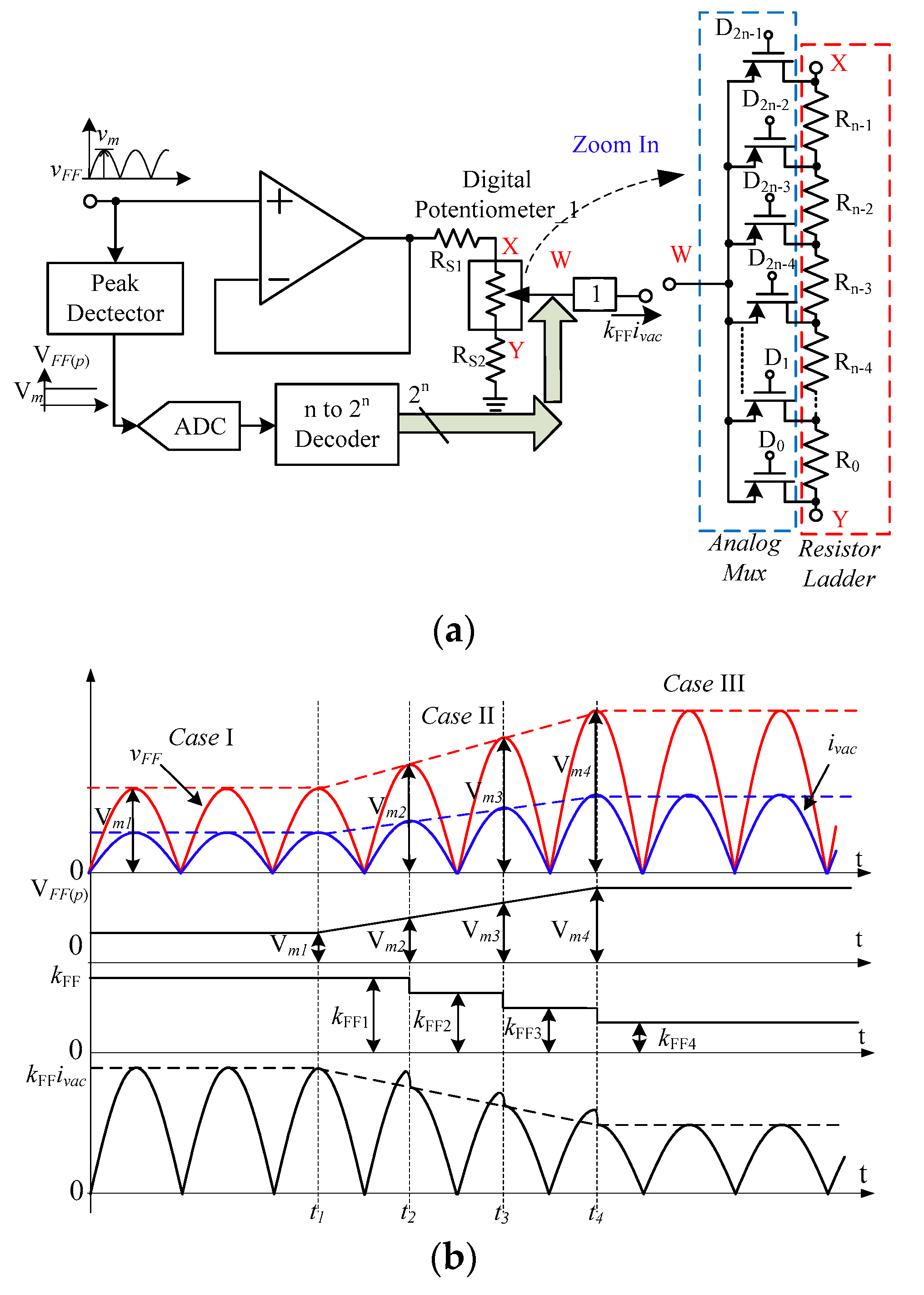
According to (2), the current control command is determined by the output of the rectified line voltage peak and the voltage error amplifier. Therefore, the command can simultaneously control the converter input impedance, demonstrating resistance and stable output voltage. Subsequently, the roles of the gains kFF(k) and kFB(k) in this study are explained.
The gain
kFF(
k) provides an open-loop modification that maintains voltage loop gain at a constant value. For example, when the output power remains unchanged (fixed
kFB) and the input voltage doubles, the peak detector readjusts the gain controller size as follows:
The results reveal that, although the current ivac is doubled, the current command imo(t) is halved, maintaining input power identical to that in the previous state.
The gain kFB(k) is controlled using the voltage error amplifier. When the output power increases, the output voltage Veao of the voltage error amplifier increases. Through the digital output of the ADC, the gain kFB(k) is increased to change the value of the root mean square of the current command imo(t) to stabilize the output voltage. By contrast, when the output power decreases, the gain kFB(k) decreases the root mean square value of the current command imo(t). Notably, on the basis of the twice-line frequency, sampling of the S/H circuit is conducted to obtain a point within a half-wave cycle of the supply mains to ensure that the gain kFB(k) is unaffected by the 120 Hz output ripple voltage.
4. Design Criteria
Two adjustable gain modulators are used to resolve the defects of poor conventional PFC transient response. Therefore, the settings of the two digital variable resistances are critical. The selection of a compensator, digital potentiometer resolution, and gain range require consideration as well as the inductors, power switch, and diode voltage and current-withstand capacities. For the proposed PFC, we applied the following circuit parameter settings.
Input AC voltage: vac = 110 Vrms~220 Vrms;
Output DC voltage: VO = 385 VDC;
Output maximum power: PO(max) = 300 W;
Switching frequency: fS = 70 kHZ.
4.1. Digital Potentiometer
In (6), the current command
kFFivac and feedforward voltage
vFF are crucial parameters for determining the series resistance of the first digital potentiometer. If maximum output power is set as a condition, when the input voltage reaches the maximum peak, the feedforward voltage
vFF maximum peak is V
m(max).
Table 1 indicates that, D
0 = 1 for the decoder when the voltage peak is at its maximum. The minimum peak of the current command
kFFivac can be predicted because its peak value depends on the input current. The relationship for resistance R
S2 can be expressed as follows:
By contrast, when the feedforward voltage
vFF is at the minimum peak V
m(min), the decoder D
63 = 1. The relationship for resistance R
S1 is expressed as follows:
Reorganization of (10) and (11) yields the following relationship between the resistances R
S2 and R
S1:
Per the aforementioned specification, the maximum peak range of the input current is between 1.60 and 4.88 A. Therefore, the current command A and A. Vm(max) = 15 V and Vm(min) = 4.92 V. Equation (11) yields the resistance RS2 = 10 k Ω and RS1 = 827 Ω. In summary, the resistance of the first digital potentiometer can be determined; .
When the input voltage
vac peak decreases to 371 V, the feedforward voltage peak is
vFF(peak) = 14.84 V, and D
1 = 1 for the decoder. The current command peak
A, and the resistance R
0 is expressed as follows:
Following this inference, we find that different input voltage peaks correspond to different resistance values, which can be plotted as shown in
Figure 7.
Figure 7 shows that the resistances R
0 to R
62 are nonlinear. Therefore, the first digital potentiometer cannot use the equivalent series resistance scheme.
The second digital potentiometer has the main function of stabilizing the output voltage. Changes in the output power of a converter generally cause output voltage errors. To enable precise adjustment of the output power, this study adopted 6-bit digital potentiometers (10 kΩ).
4.2. Inductor
For the setting of inductors, when switching frequency is 100 kHz, the duty cycle of the converter at a low voltage input is represented as D = (V
O − V
in)/V
O = 0.59. The inductor current ripple peak-to-peak value is set as 20% of the maximum line current peak. Thus, the inductance relationship is expressed as follows [
17]:
This study set the inductance at 380 μH.
4.3. Capacitor
A crucial consideration in the selection of output capacitors is the hold-up time of the output voltage when the input energy is withdrawn. Hold-up time is typically approximately 10 ms. Although ripple current and output ripple voltage are factors that require consideration, the capacitance set with the two factors is low. Generally, the hold-up time is the main factor for consideration.
where the hold-up time Δt = 10 ms and the minimum output voltage V
O(min) = 340 V.
4.4. Power Switch and Diode
The withstand current of the power switch selected must be higher than the maximum peak current of the inductor. Therefore, the withstand current of the power switch must be at least 5.36 A, and the withstand voltage must be higher than the 400-V output voltage. Diodes must feature the same level rating values as the power switch.
4.5. Design Consideration of the Compensator
Many studies have analyzed boost PFC power transfer functions [
24,
27]. Relevant literature has revealed that, when boost PFC is operated with resistive load, the control-to-output transfer function of the boost PFC is a one-order system. Hence, the compensator adopts PI controller for providing the phase margin for 45° to 60° and high cross-over frequency [
28]. The bandwidth for the voltage loop of conventional PFC is set for 5 HZ to 10 HZ. In this paper, the proposed method can avoid the influence from the 120 HZ ripple voltage. The maximum bandwidth can be designed for 60 HZ.
5. Experimental Results
The following experimental parameters were used: input voltage 110 Vrms, output voltage VO = 400 V, output power PO = 40–300 W, switching frequency f = 70 kHz, output inductance L = 382 μH, and output capacitor CO = 220 μF.
Figure 8a,b respectively represent the grid waveforms for output power P
O = 40 W and P
O = 300 W at an input voltage
vac = 110 V
rms. The waveforms suggest that the proposed control strategy generates input line current waveforms that achieve phases almost perfectly consistent with that of the input line voltage waveforms. The results reveal that the boost PFC converter used according to the proposed method increases the system PF.
According to the experimental data, the proposed technique not only prevents effects on the PF but also resolves the ripple components of the twice-line frequency, improving the input line current THDi. These effects are obtained by measuring the input voltage in the following conditions:
vac = 110 V
rms (P
O = 40 W) and
vac = 110 V
rms (P
O = 300 W). The line current THDi values of both conditions were lower than 5.9%. In particular, the THDi at 300 W was 0.95%, as shown in
Figure 9a,b.
The proposed method requires no additional capacitor on the feedforward loop to attenuate second harmonic waves, and the bandwidth settings of the voltage loops are higher than in conventional methods. Therefore, the proposed control strategy realizes greater input transient response than conventional methods do, as shown in
Figure 10 and
Figure 11.
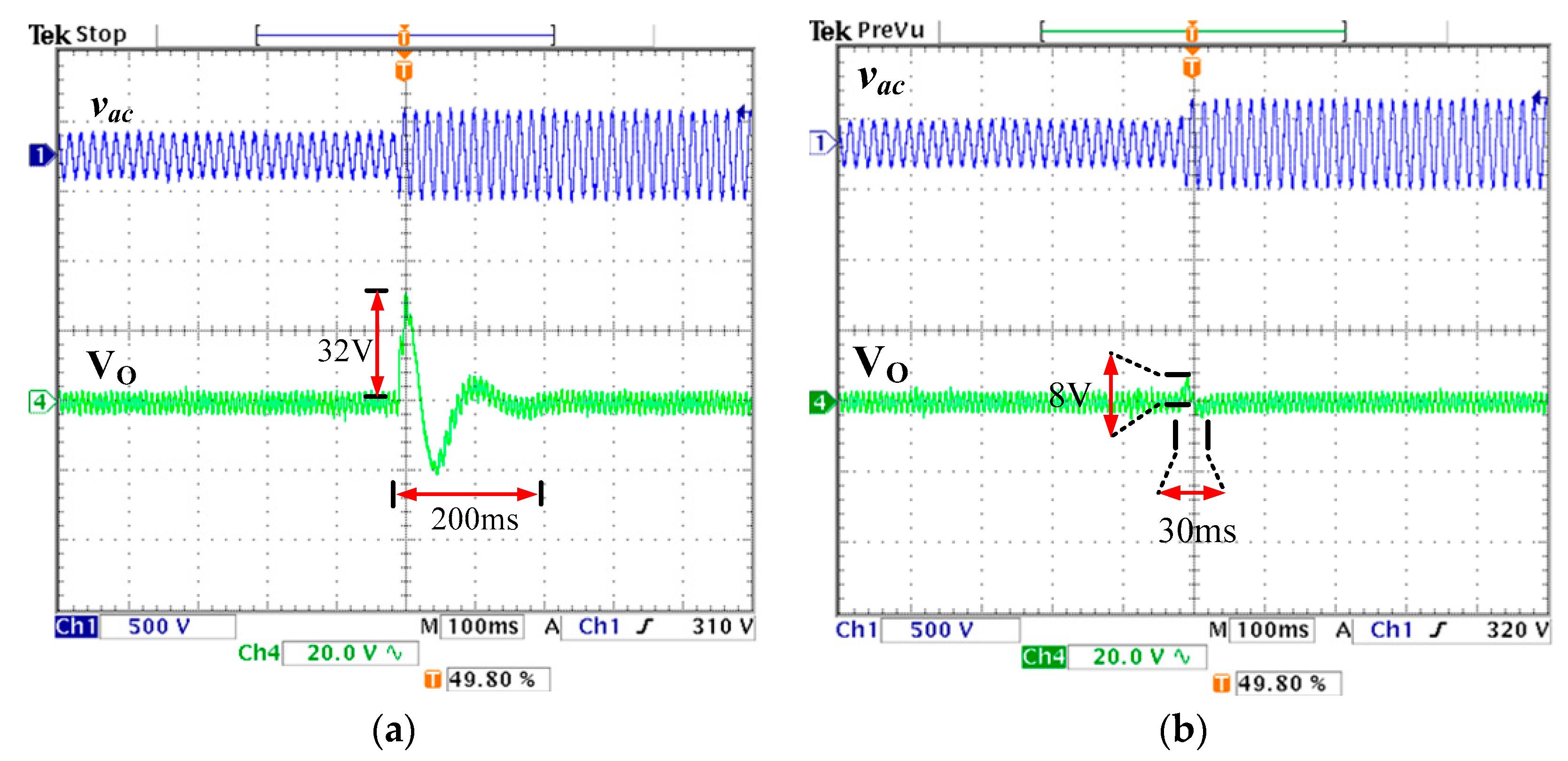
Figure 10a depicts the input transient response measured in the conditions of input current THDi = 4% and output power P
O = 300 W. According to
Figure 10a, when the input voltage increased from 110 V
rms to 220 V
rm, the time for the output voltage to transfer from a transient state to a steady state was approximately 200 ms, and voltage maximum overshoot was approximately 32 V in the conventional method. The proposed method reduced the transient time by approximately 170 ms and voltage maximum overshoot by approximately 24 V, respectively, as depicted in
Figure 10b. By contrast, in the same conditions, when the input voltage changed from 220 to 110 V
rms, the steady-state time and voltage maximum overshoot respectively exhibited 260-ms and 5-V differences, as shown in
Figure 11a,b.
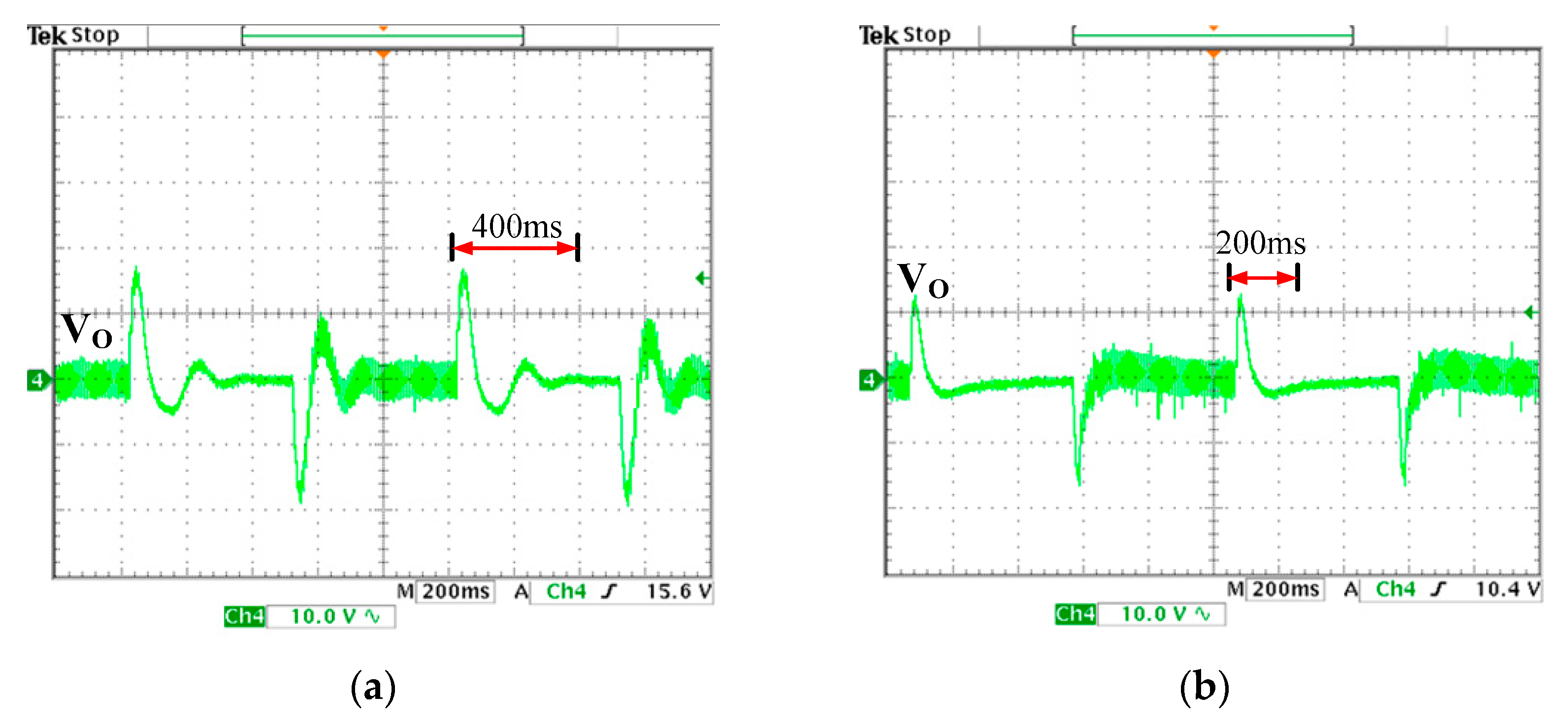
The output voltage transient responses for PFC with the use of conventional and proposed methods were compared.
Figure 12a depicts the conventional PFC output voltage transient response (for output power conditions of light load 40 W and heavy load 300 W);
Figure 12b depicts the new control strategy–based PFC output voltage transient response. The experimental data revealed that the conventional PFC output voltage transient response required approximately 400 ms to achieve a steady state, whereas the new PFC required approximately 200 ms. The proposed PFC was superior to the conventional one. The experimental data verified that the proposed method reduced input voltage and load transient response time.
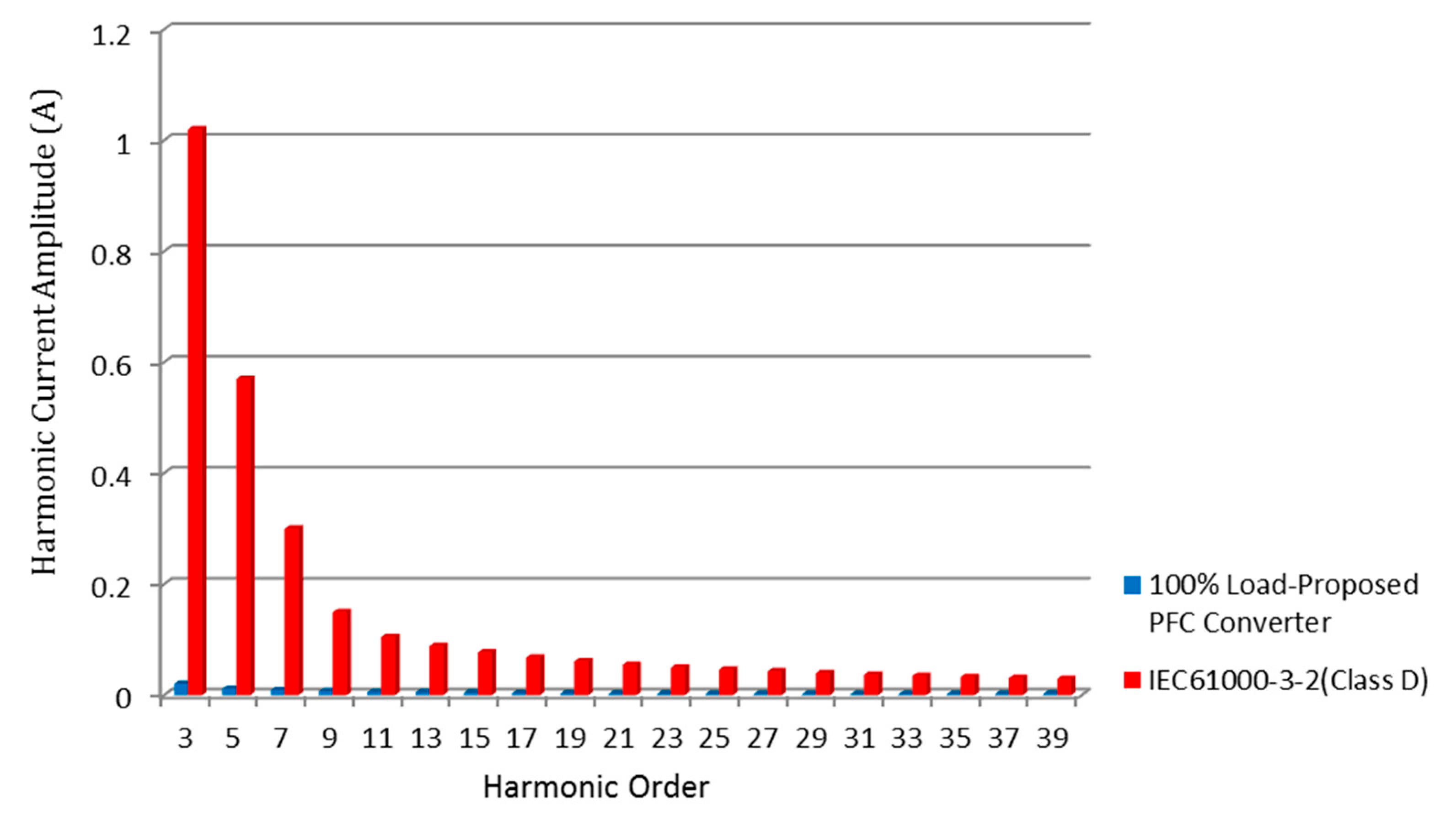
Table 3 demonstrates the relevant PFC measurement data yielded by the new control technique, including the PF value and input current THDi. The optimal input current THDi was approximately 0.9%. Finally, the testing condition was set for 110 V input voltage and 300 W output power. The standard of IEC 61000-3-2 (Class-D) was applied to compare with the proposed scheme, as shown in
Figure 13. From this figure, the current harmonic for odd-harmonic of the proposed structure was much lower than the standard. Hence, the proposed scheme of this paper is feasible.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}