
Analysis of Obstacle Avoidance Strategy for Dual-Arm Robot Based on Speed Field with Improved Artificial Potential Field Algorithm

Abstract
:1. Introduction
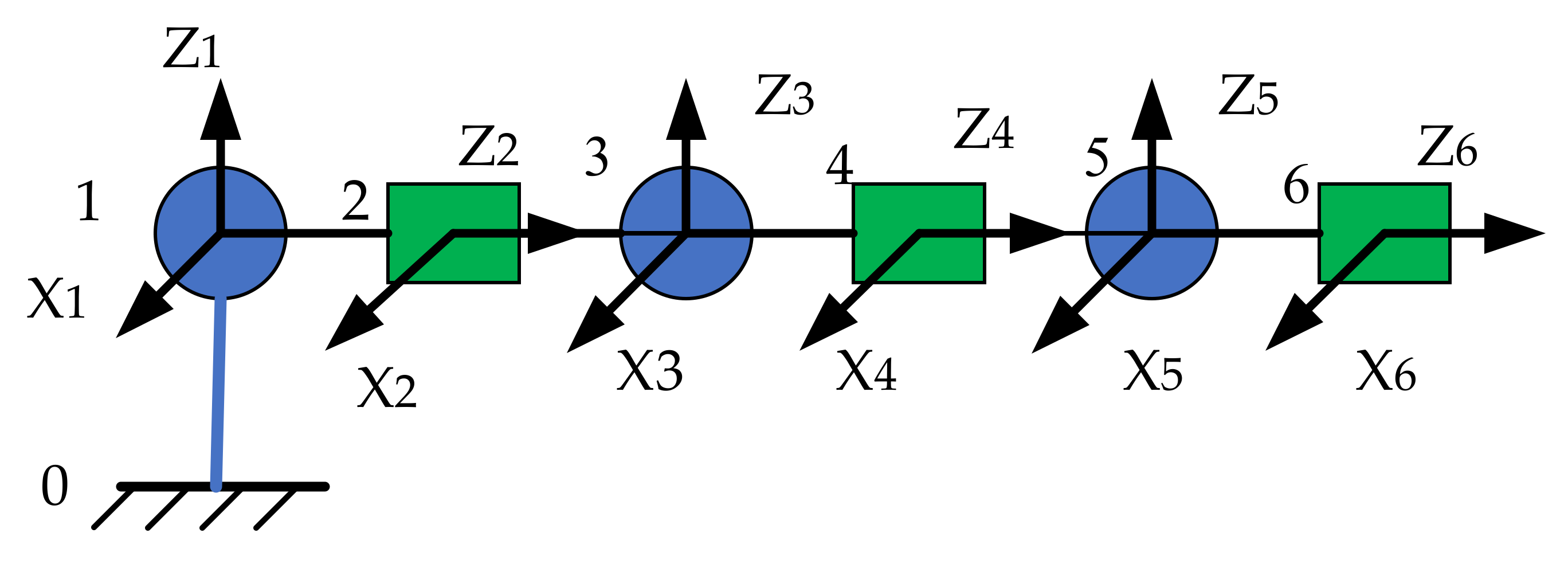
2. Kinematics Model of 6-DOF Dual-Arm Robot
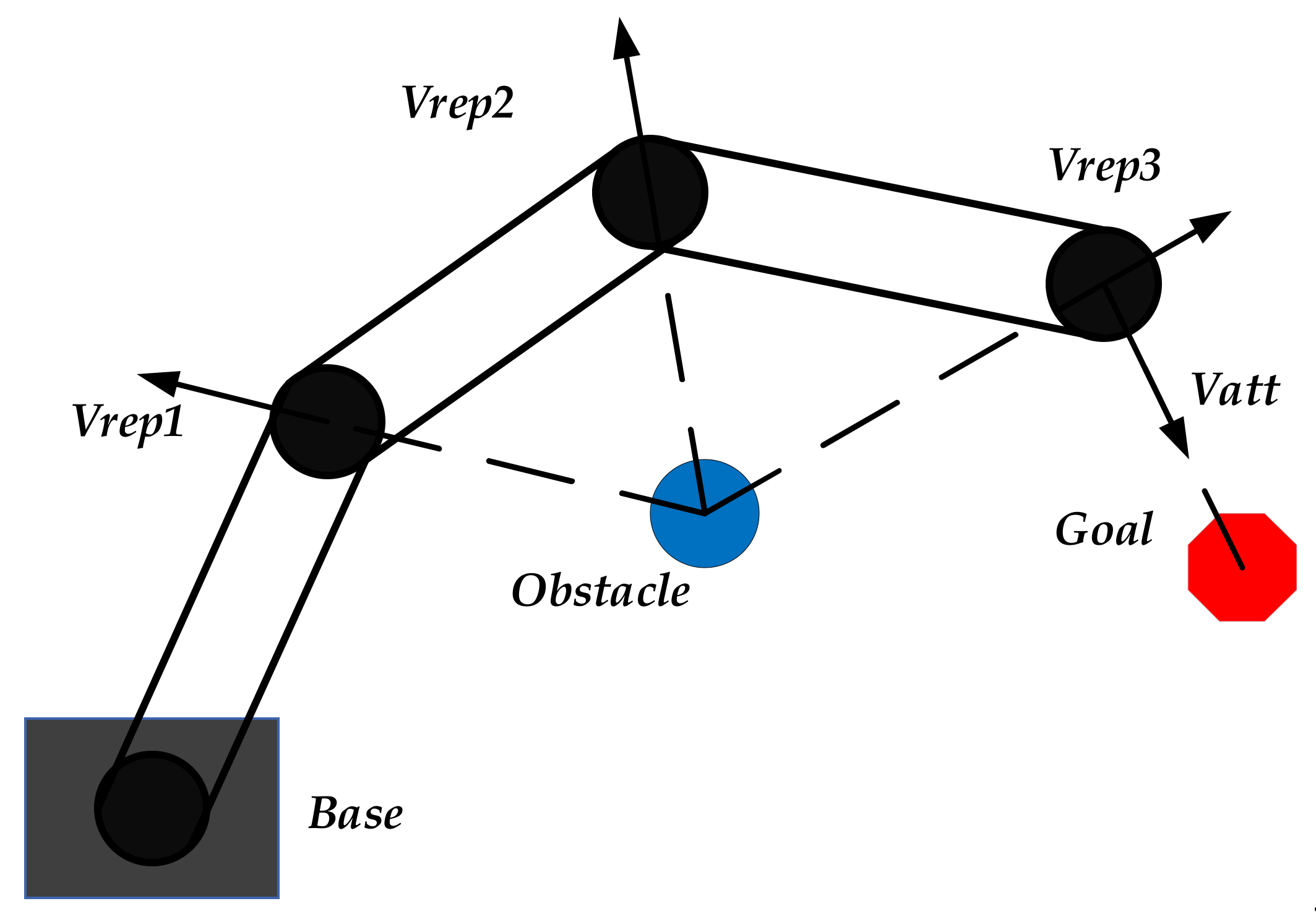
3. Improved Artificial Potential Field Algorithm Based on Velocity Field
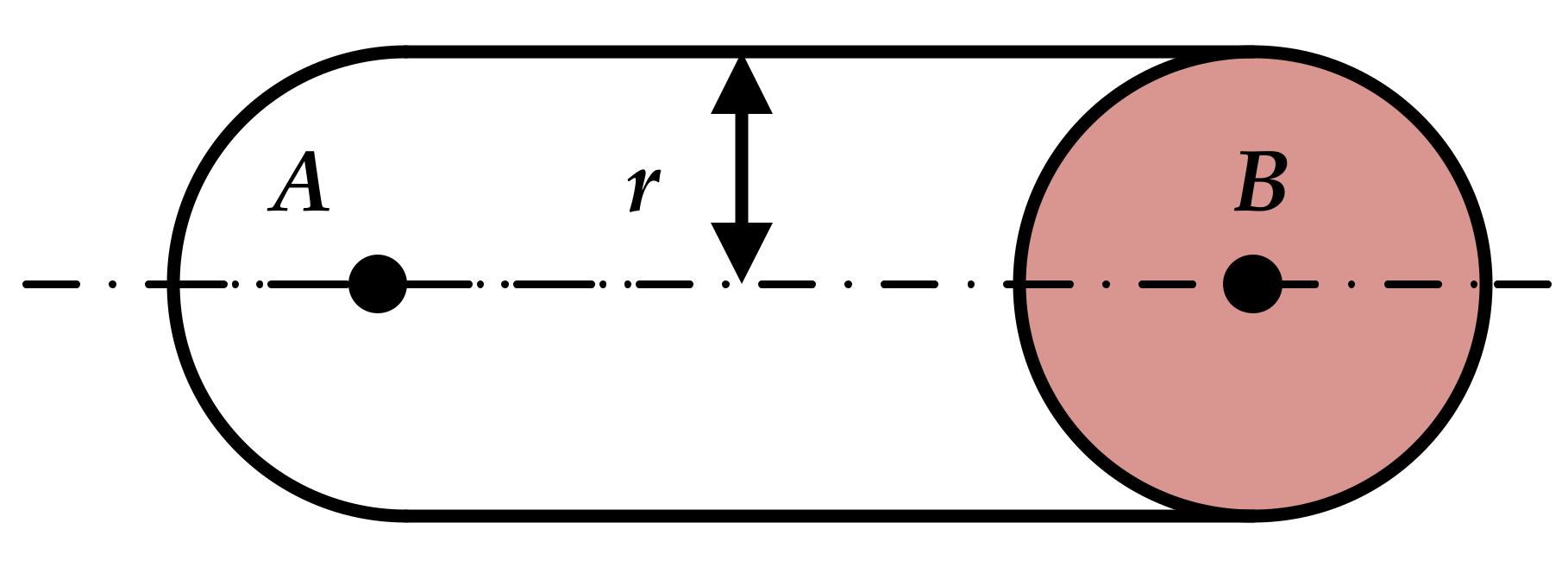
3.1. Calculation of The Distance between Two Robotic Manipulator of Dual-Arm Robot
- If the values of k1 and k2 were satisfied ( and ), then the distance between MN is the shortest distance between line AB and CD, and the point M and N are the corresponding vertical feet.
- If the values of k1 and k2 were not satisfied ( and ), the distances from the point A and B to the line CD and the distance from the point C and D to the line AB are obtained separately. Thus, four vertical foot points, i.e., A1, B1, C1, and D1, can be obtained. Then, the minimum of the corresponding distances AA1, BB1, CC1, and DD1 is the shortest distance between line AB and CD.
- If the values of k1 and k2 are not satisfied ( and ), there could be no vertical foot point on line AB and line CD. In this case, only the distances of line AC, AD, BC, and BD are required, and the minimum value is the distance between line AB and CD. Therefore, the distance between the two robot manipulators can be solved by the distance between the two lines described above. By comparing with the set collision threshold of collision, whether a collision has occurred can then be determined.
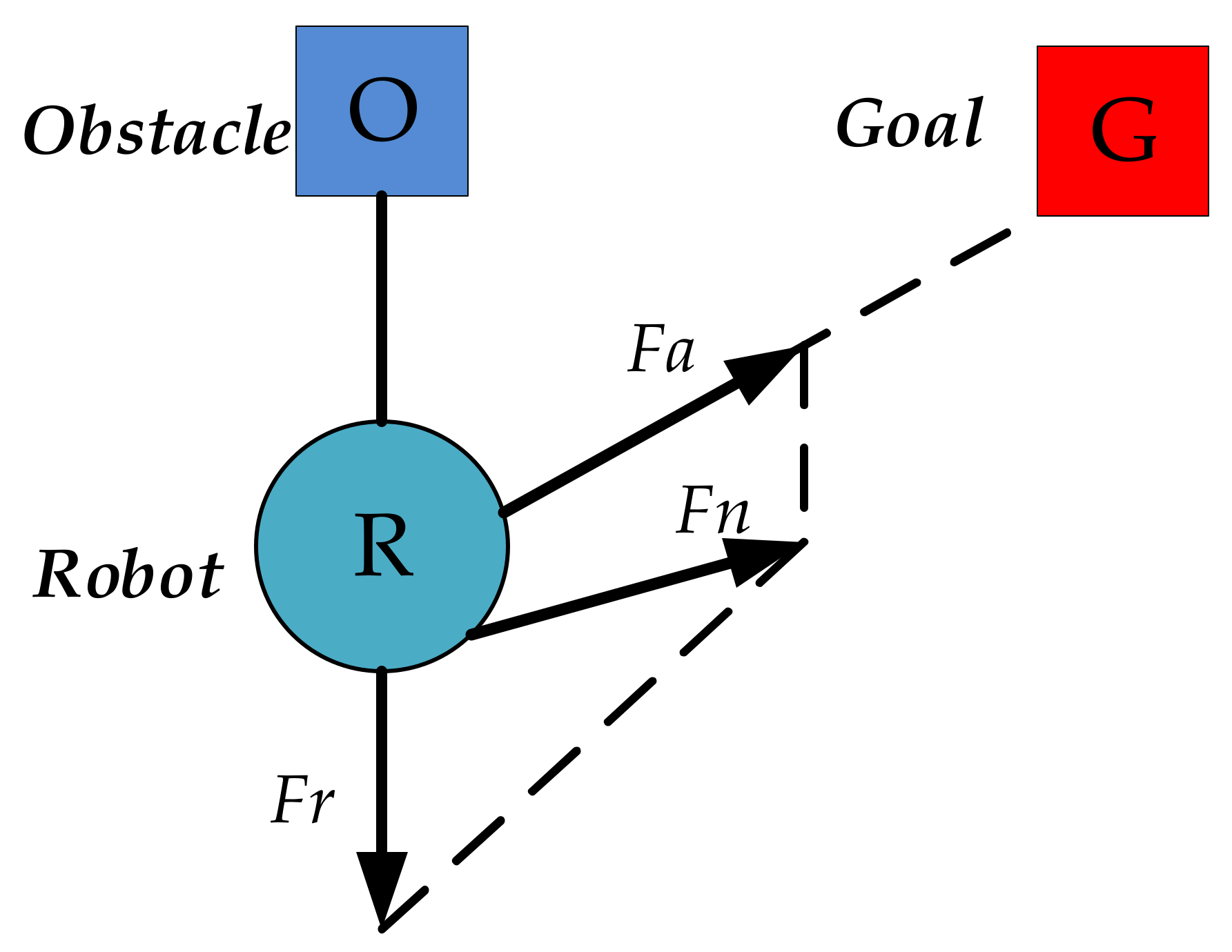
3.2. Improved Artificial Potential Field Algorithm
3.3. Definition of Attraction Speed and Repulsion Speed
| Algorithm 1. Calculate distance between links. |
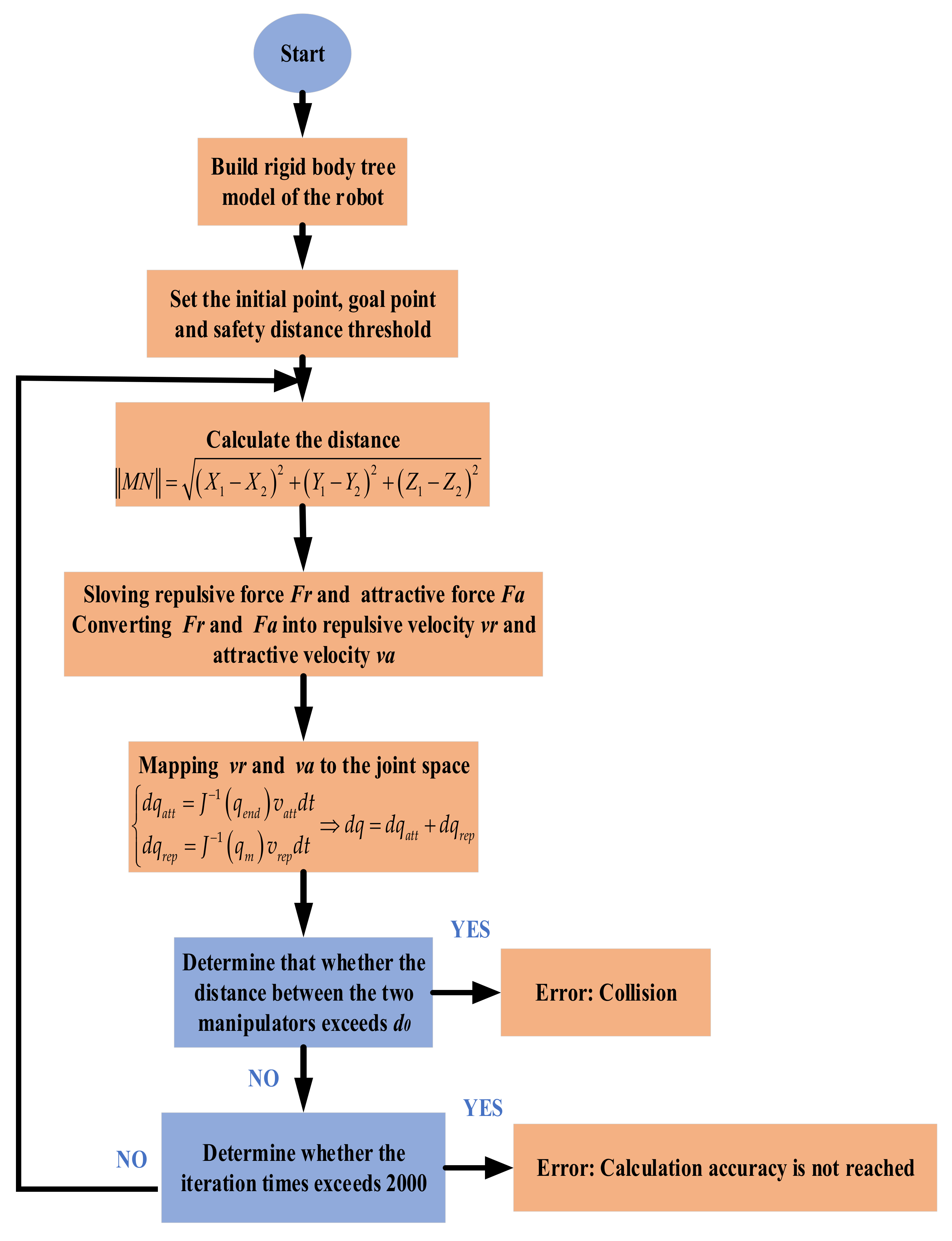
| 1: Build robot model in rigid body tree. %Specifications of the Rigid body tree are denoted by D-H parameters. 2: 3: for i = 1:2000% i is iteration times … 4: L7 = getTransform (robot, ql, ‘body7’); R7 = getTransform (robot1, qr, ‘body7’) %Get the end pose of left and right manipulator. 5: a = norm (L7-lf), b = norm (R7-rf), % lf and rf are goal points, a and b are distance calculation formulas. 6: if norm (dq) < 0.002 && a %where initial dq = [0 0 0 0 0 0]. dq1 = [0.001*ones (3,1); zeros (3,1)]. %Add a random disturbance 7: end 8: dq = potential field force (d, d0, lf rf, robot, dq1) %Update dq 9: ql = double(ql + dq) 10: repeat step 6 to 9 to obtain right qr 11: if norm(L7-lf) < 0.00001 12: break; 13: end 14: end |
| Algorithm 2. Calculation of joint potential field force. |
| 1: dq = potential field force (d, d0, lf rf, robot, dq1) 2: z = 0 3: 4: if norm (lf-l(end,:)) > 0.05 5: lf0 = 0.05; 6: lf0 = lf0/ norm (lf-l(end,:)) * (lf-l(end,:));% Calculate attractive force, l(end,:) is the pose of left manipulator. 7: else 8: lf0=lf-l(end,:); 9: end 10: Fr1 = 1/600*(1/(norm(dj)-d)-1/d0) * (lf0) ^3/(norm(dj)-d) ^2 11: Fr2 = 1/200*(1/(norm(dj)-d)-1/d0) * (lf0) ^2 12: Fr = Fr1 + Fr2 %Fr is repulsive force and dj is the distance between goal point and motion particle. 13: dq = ik (lf0, q1, robot, dq1) %get a new dq |
4. Simulation and Experiment
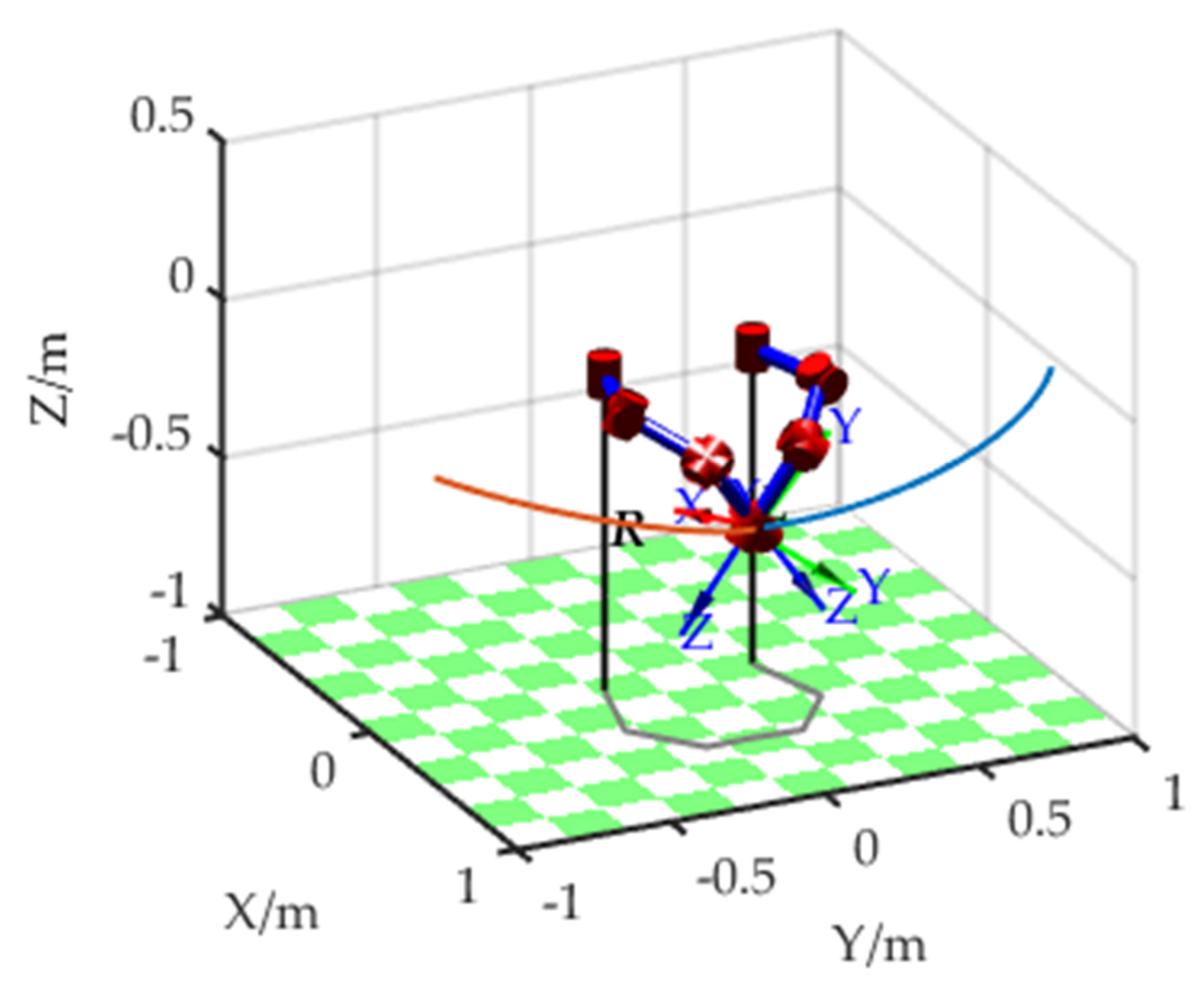
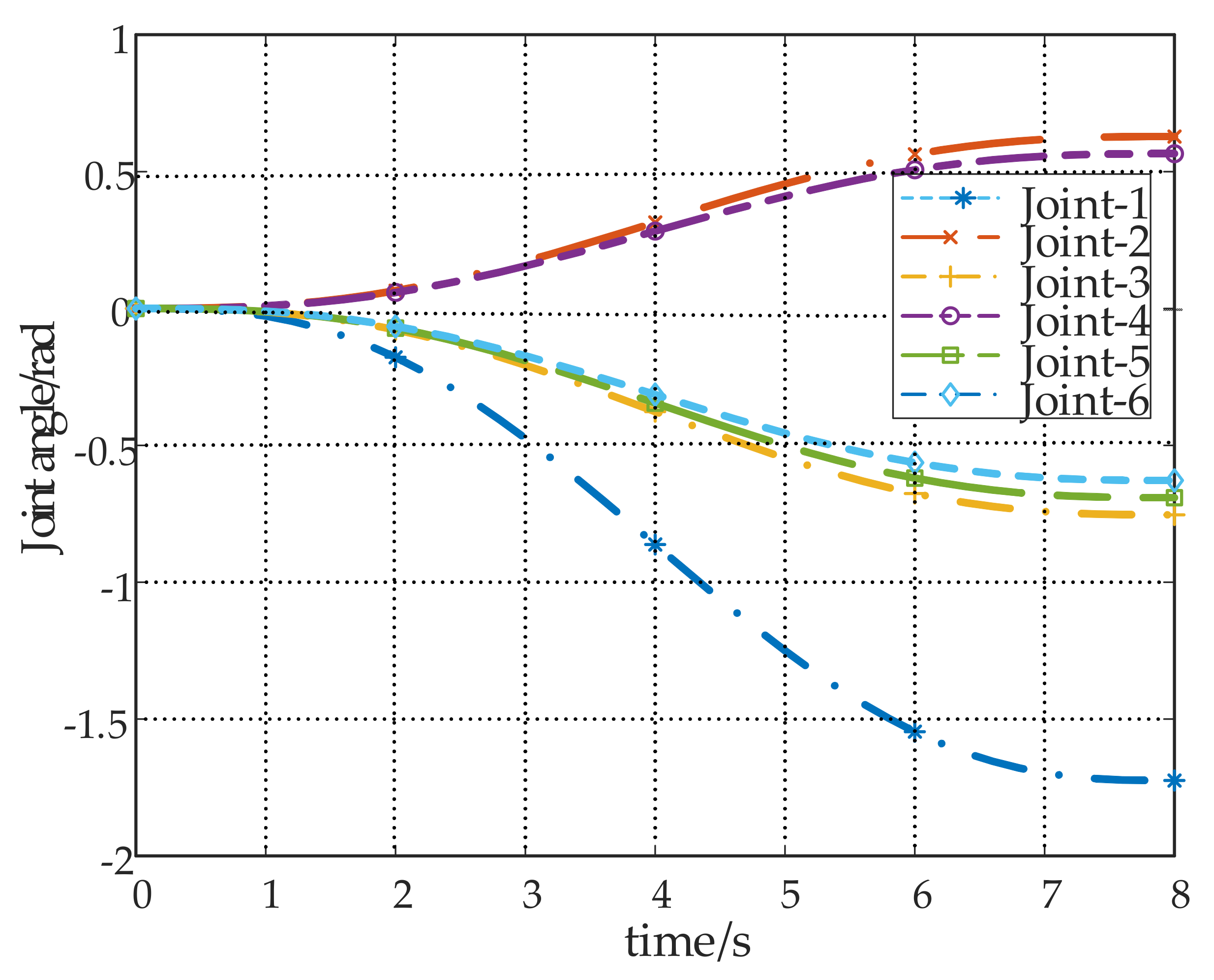
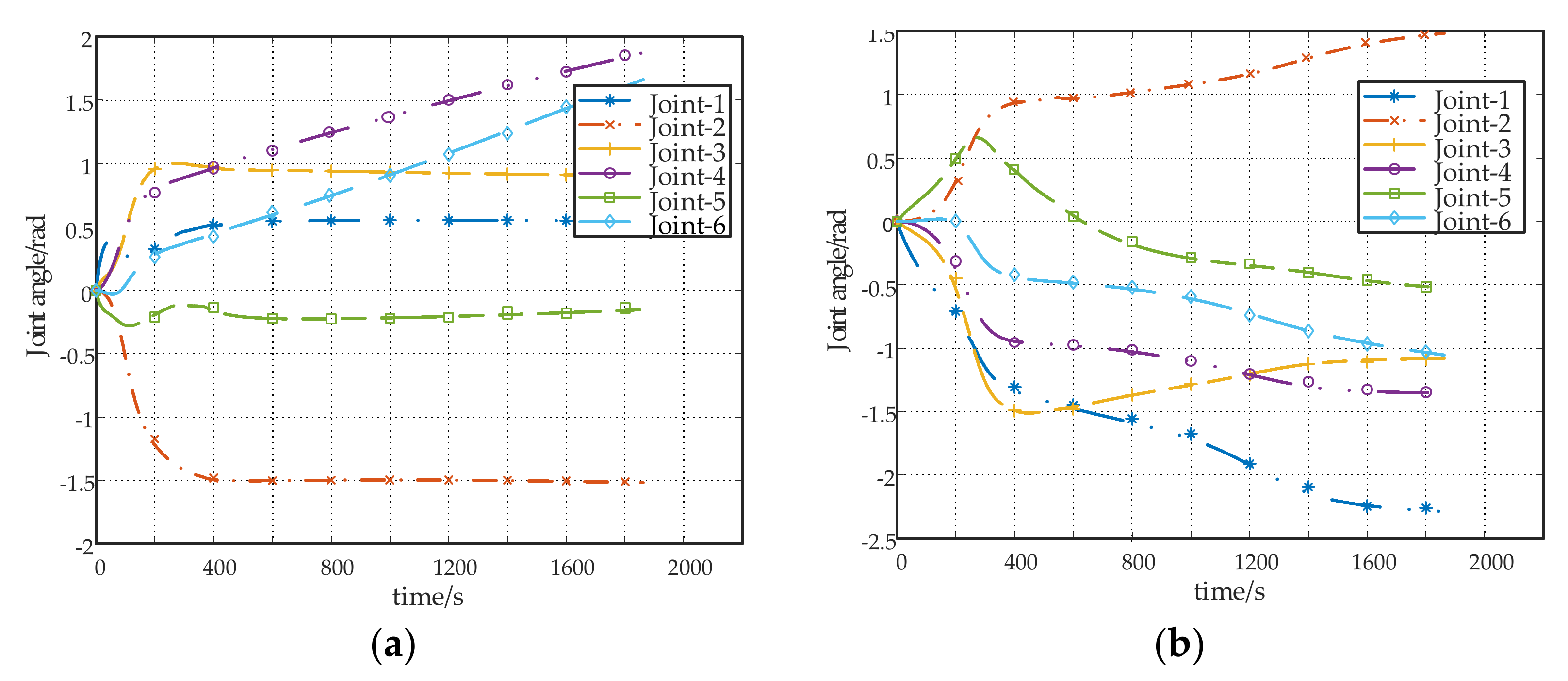
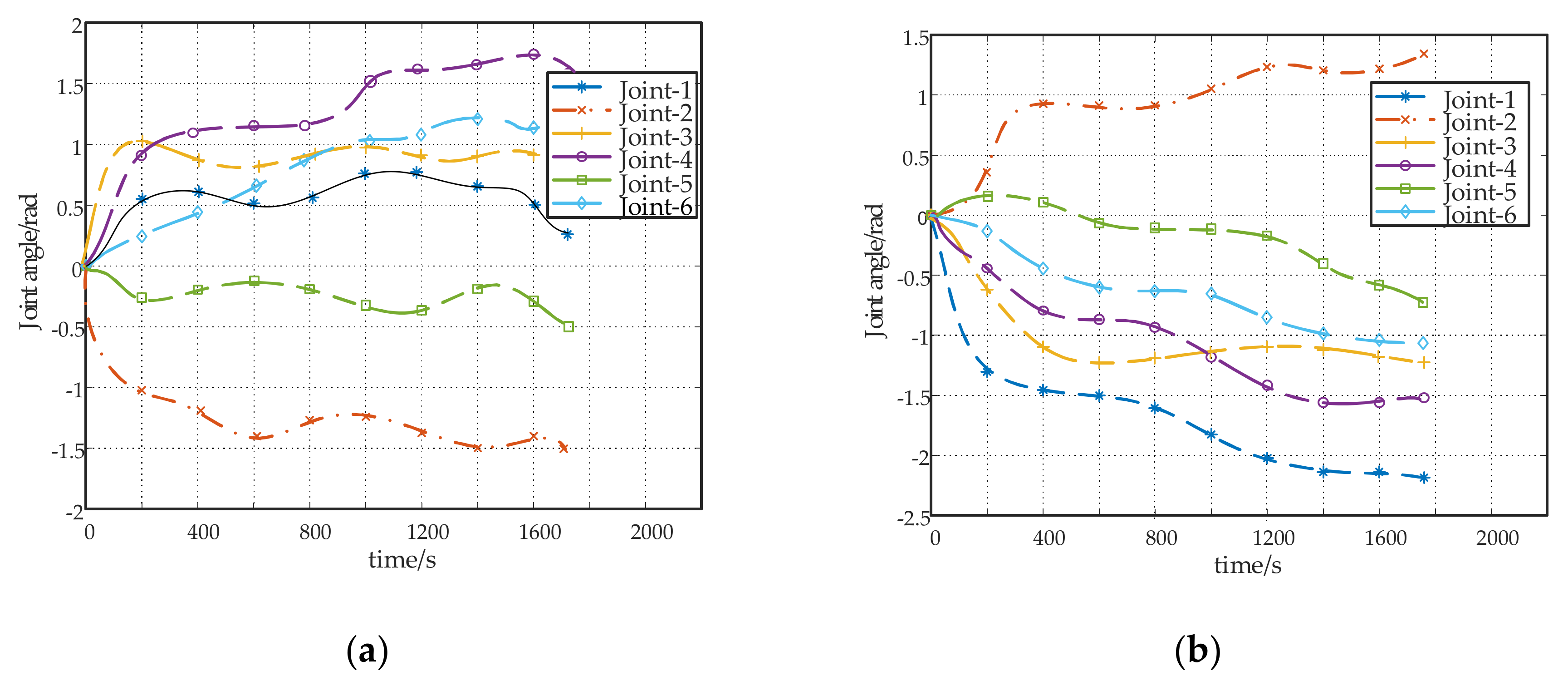
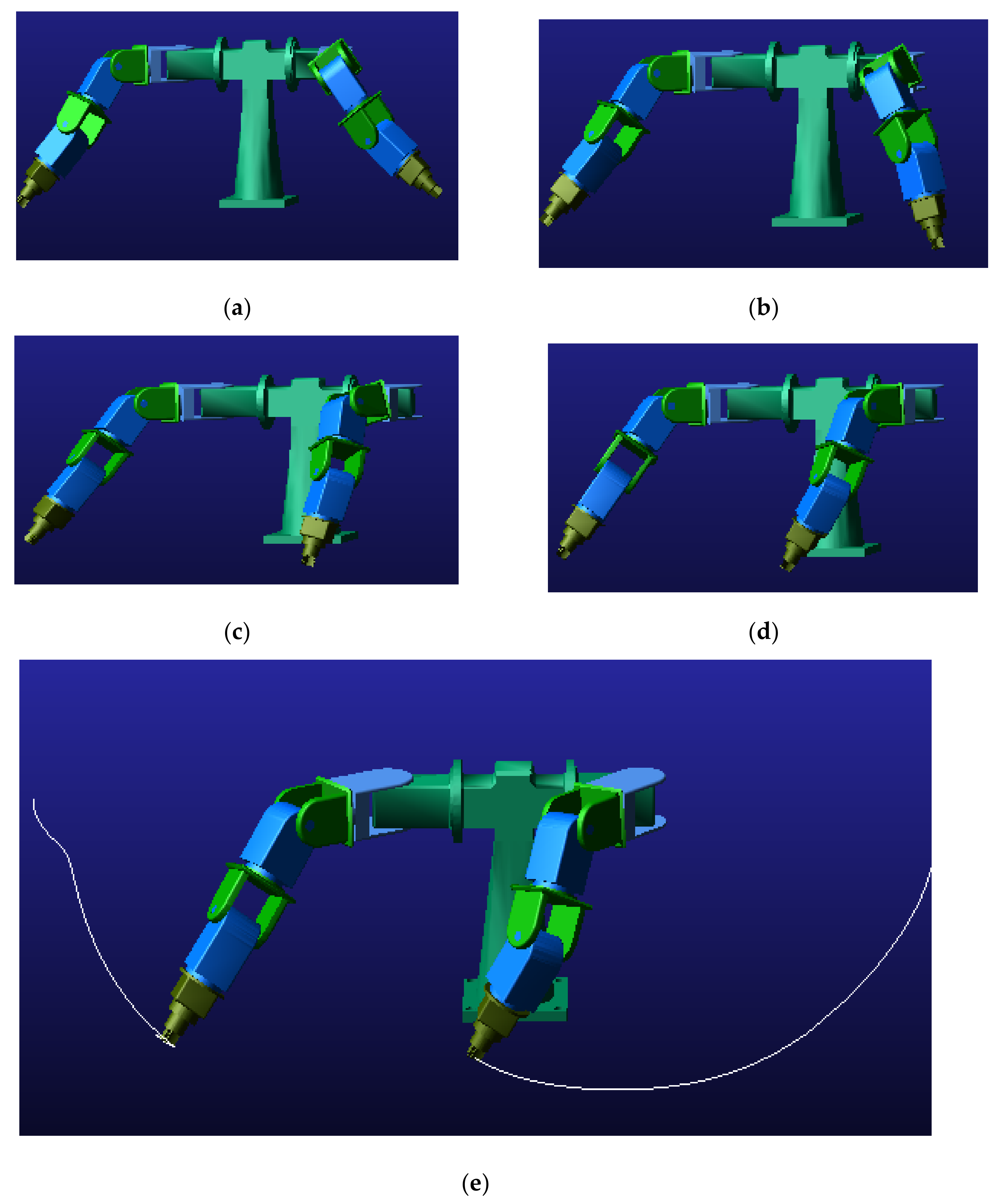
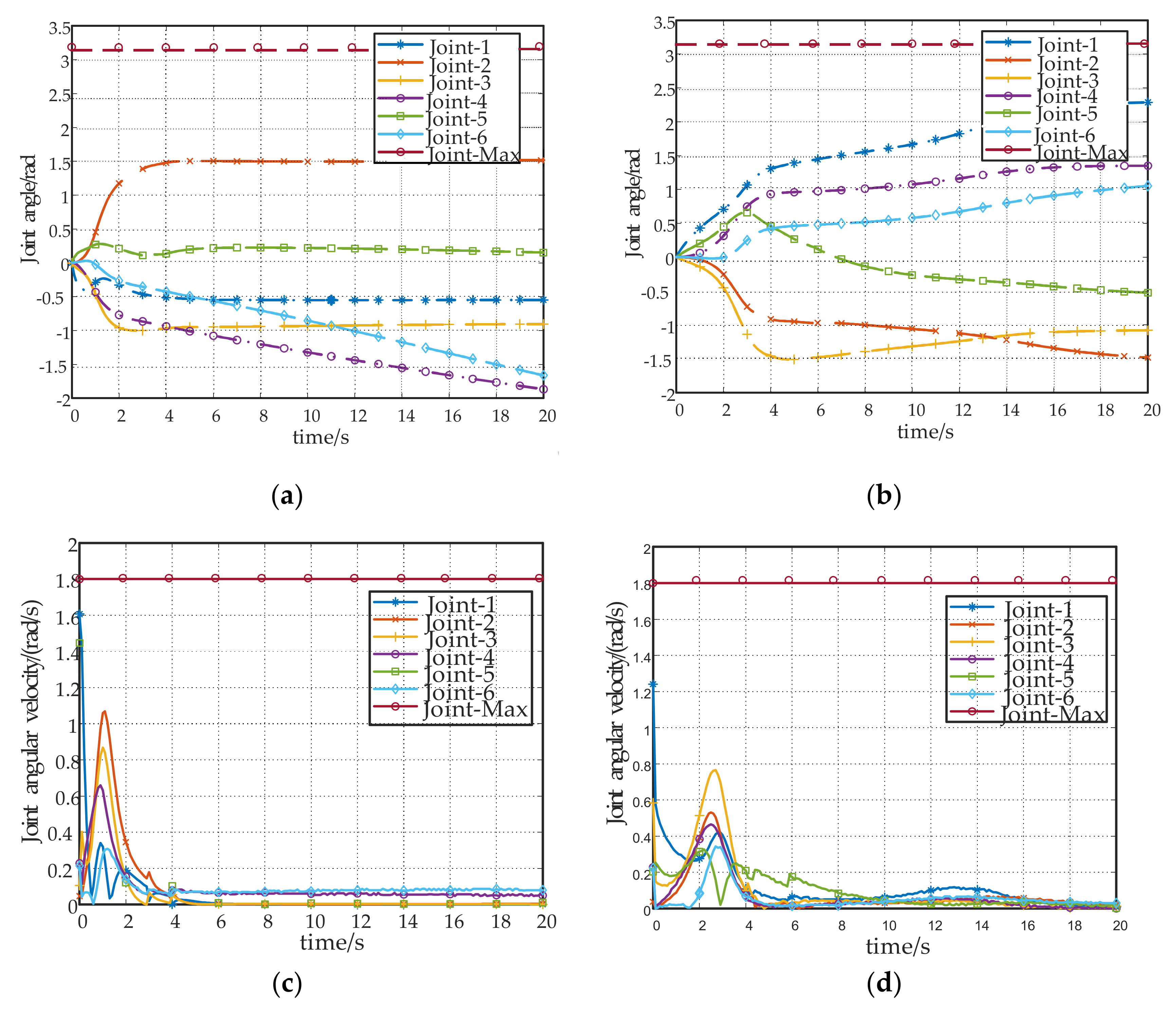
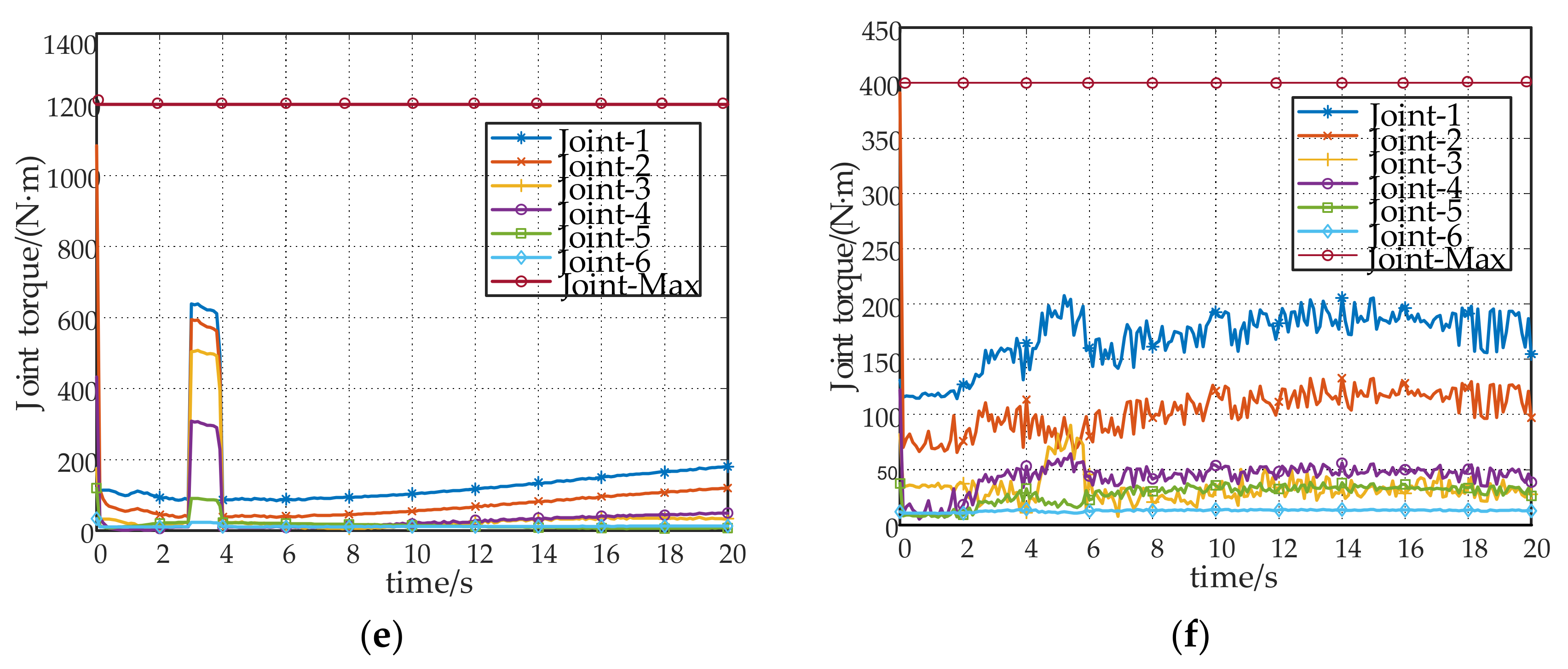
4.1. Simulation in a Static Environment Based on MATLAB
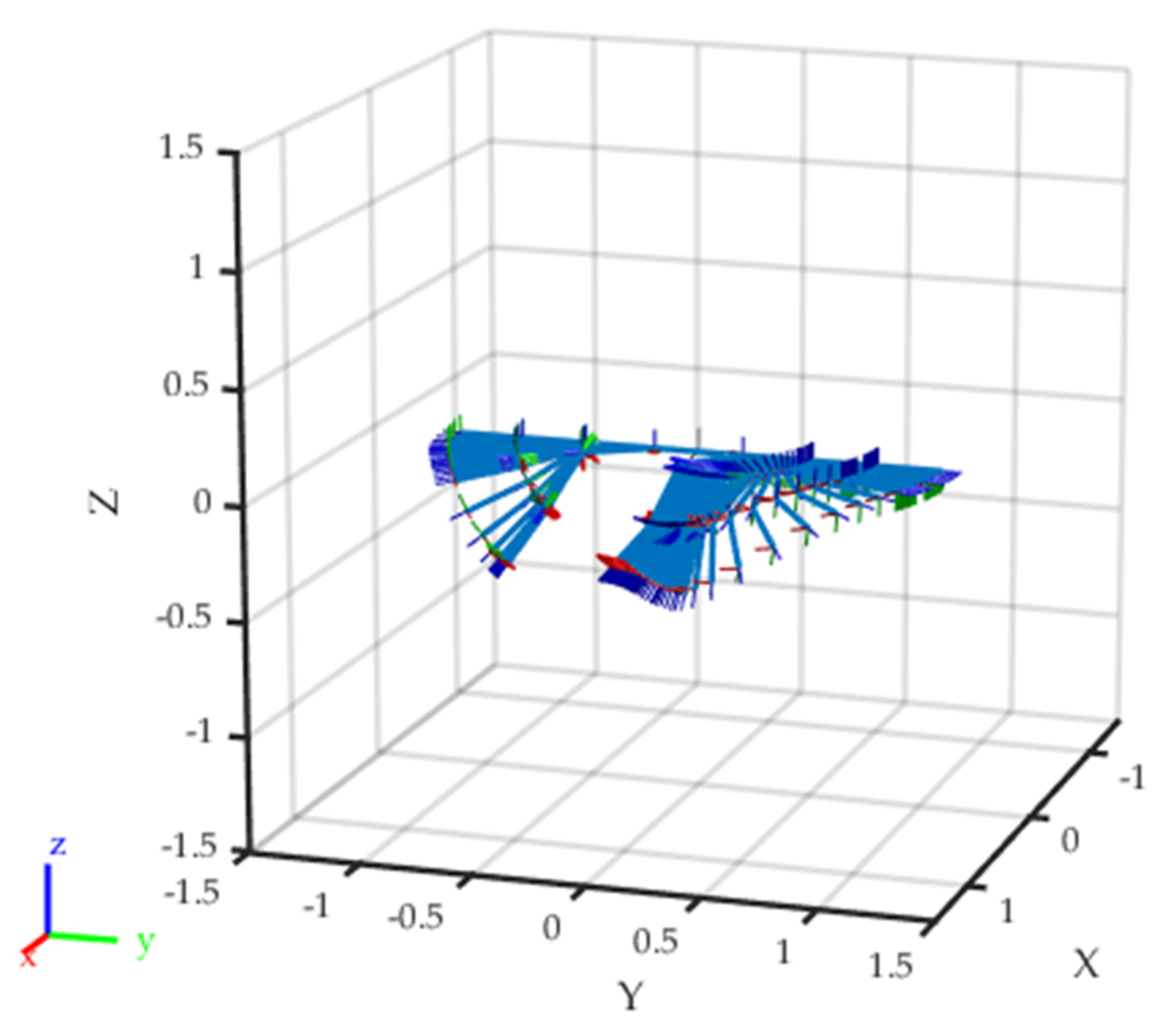
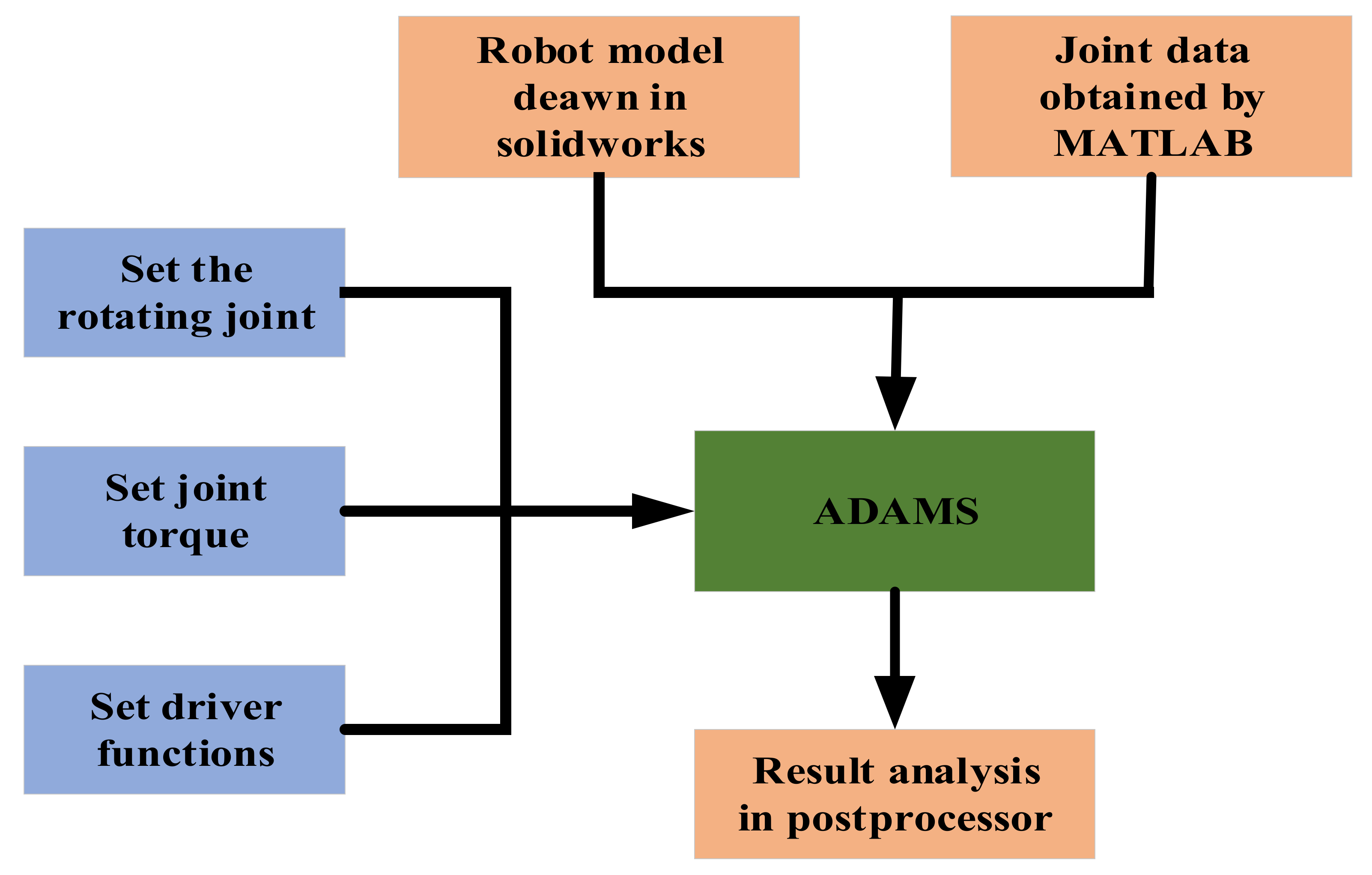
4.2. Simulation in a Static Environment Based on MATLAB & Adams
5. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
References
- He, Z.; Yuan, F.; Chen, D.; Wang, M. Dynamic Obstacle Avoidance Planning for Manipulators of Home. In Proceedings of the IEEE International Conference on Robotics and Biomimetics, Dali, China, 6–8 December 2019; pp. 2737–2742. [Google Scholar]
- Glorieux, E.; Riazi, S.; Lennartson, B.E.V. Productivity/energy optimization of trajectories and coordination for cyclic multi-robot systems. Robot. Comput. Integr. Manuf. 2018, 49, 152–161. [Google Scholar] [CrossRef]
- Indri, M.; Trapani, S.; Lazzero, I. Development of a virtual collision sensor for industrial robots. Sensors 2017, 17, 1148. [Google Scholar] [CrossRef] [Green Version]
- Liang, J.; Gong, Z.; Wang, W.; Hou, Z.; Han, C.S. Dual quaternion based kinematic control for Yumi dual arm robot. In Proceedings of the IEEE International Conference on Ubiquitous Robots and Ambient Intelligence, Jeju, Korea, 28 June–1 July 2017; pp. 114–118. [Google Scholar]
- Phukan, S.; Mahanta, C. A position synchronization controller for co-ordinated links (cool) dual robot arm based on integral sliding mode: Design and experimental validation. Int. J. Autom. Comput. 2021, 18, 110–123. [Google Scholar] [CrossRef]
- Liu, Q.; Chen, C.Y.; Wang, C.; Wen, W. Common workspace analysis for a dual-arm robot based on reachability. In Proceedings of the IEEE International Conference on CIS & RAM, Ningbo, China, 19–21 November 2017; pp. 797–802. [Google Scholar]
- Kivelä, T.; Mattila, J.; Puura, J. Redundant Robotic Manipulator Path Planning for Real-Time Obstacle and Self-Collision Avoidance. In Advances in Service and Industrial Robotics; Springer: Cham, Switzerland, 2017; pp. 208–216. [Google Scholar]
- Kim, J.O.; Khosla, P. Real-time obstacle avoidance using harmonic potential functions. In Proceedings of the 1991 IEEE International Conference on Robotics and Automation, San Francisco, CA, USA, 9–11 April 1991; pp. 790–796. [Google Scholar]
- Abhishek, T.S.; Schilberg, D.; Doss, A.S.A. Obstacle Avoidance Algorithms: A Review. In Proceedings of the International Conference on Robotics, Intelligent Automation and Control Technologies (RIACT 2020), Chennai, India, 2–3 October 2020; Volume 1012, p. 012052. [Google Scholar]
- Palmieri, G.; Scoccia, C.; Palpacelli, M.C.; Callegari, M. Motion planning and control of redundant manipulators for dynamical obstacle avoidance. Machines 2021, 9, 121. [Google Scholar] [CrossRef]
- Zhang, C.; Zhou, L.; Li, Y.; Fan, Y. A Dynamic Path Planning Method for Social Robots in the Home Environment. Electronics 2020, 9, 1173. [Google Scholar] [CrossRef]
- Han, B.; Luo, X.; Luo, Q.; Zhao, Y.; Lin, B. Research on Obstacle Avoidance Motion Planning Technology of 6-DOF Manipulator. In Proceedings of the International Conference on Geometry and Graphics, São Paulo, Brazil, 9–13 August 2020; Springer: Berlin/Heidelberg, Germany, 2021; pp. 604–614. [Google Scholar]
- Wang, J.; Liu, S.; Zhang, B.; Yu, C. Manipulation Planning with Soft Constraints by Randomized Exploration of the Composite Configuration Space. Int. J. Control Autom. Syst. 2021, 19, 1340–1351. [Google Scholar] [CrossRef]
- Lin, Z.; Fu, J.; Shen, H.; Gan, W. Non-singular tool path planning by translating tool orientations in c-space. Int. J. Adv. Manuf. Technol. 2014, 71, 1835–1848. [Google Scholar] [CrossRef]
- Gabriely, Y.; Rimon, E. C-space characterization of contact preserving paths with application to tactile-sensor based mobile robot navigation. In Proceedings of the 2008 IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; pp. 1792–1797. [Google Scholar]
- Willms, A.R.; Yang, S.X. Real-time robot path planning via a distance-propagating dynamic system with obstacle clearance. IEEE Trans. Syst. Man Cybern. Part B 2008, 38, 884–893. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jung, J.H.; Kim, D.H. Local Path Planning of a Mobile Robot Using a Novel Grid-Based Potential Method. Int. J. Fuzzy Log. Intell. Syst. 2020, 20, 26–34. [Google Scholar] [CrossRef]
- Scalera, L.; Giusti, A.; Cosmo, V.D.; Riedl, M.; Matt, D.T. Application of Dynamically Scaled Safety Zones Based on the ISO/TS 15066: 2016 for Collaborative Robotics. Int. J. Mech. Control 2020, 21, 41–50. [Google Scholar]
- Park, S.O.; Min, C.L.; Kim, J. Trajectory Planning with Collision Avoidance for Redundant Robots Using Jacobian and Artificial Potential Field-based Real-time Inverse Kinematics. Int. J. Control Autom. Syst. 2020, 18, 2095–2107. [Google Scholar] [CrossRef]
- Lei, T.; Dian, S.; Gu, G.; Zhou, K.; Feng, X. A novel potential field method for obstacle avoidance and path planning of mobile robot. In Proceedings of the 2010 IEEE International Conference on Computer Science & Information Technology, Chengdu, China, 9–11 July 2010; pp. 633–637. [Google Scholar]
- Xu, J.; Park, K.S. A real-time path planning algorithm for cable-driven parallel robots in dynamic environment based on artificial potential guided RRT. Microsyst. Technol. 2020, 26, 3533–3546. [Google Scholar] [CrossRef]
- Lee, D.; Jeong, J.; Kim, Y.H.; Park, J.B. An improved artificial potential field method with a new point of attractive force for a mobile robot. In Proceedings of the 2017 2nd International Conference on Robotics and Automation Engineering (ICRAE), Shanghai, China, 29–31 December 2017; pp. 63–67. [Google Scholar]
- Weerakoon, T.; Ishii, K.; Nassiraei, A. An artificial potential field based mobile robot navigation method to prevent from deadlock. J. Artif. Intell. Soft Comput. Res. 2015, 5, 189–203. [Google Scholar] [CrossRef] [Green Version]
- Khatib, O. Real-time obstacle avoidance for manipulators and mobile robots. Int. J. Robot. Res. 1986, 5, 90–99. [Google Scholar] [CrossRef]
- Flacco, F.; Kroger, T.; Luca, A.D.; Khatib, O. A depth space approach to human-robot collision avoidance. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, St. Paul, MN, USA, 14–18 May 2012; pp. 338–345. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Link i. | Joint Angle | Twist Angle | Length of Linkages | Offset of Linkages |
|---|---|---|---|---|
| θ | α | (m) | (m) | |
| 1 | θ1 | 0 | 0 | 0 |
| 2 | θ2 | -pi/2 | d2 | 0 |
| 3 | θ3 | -pi/2 | 0 | 0 |
| 4 | θ4 | -pi/2 | d4 | 0 |
| 5 | θ5 | -pi/2 | 0 | 0 |
| 6 | θ6 | -pi/2 | d6 | 0 |
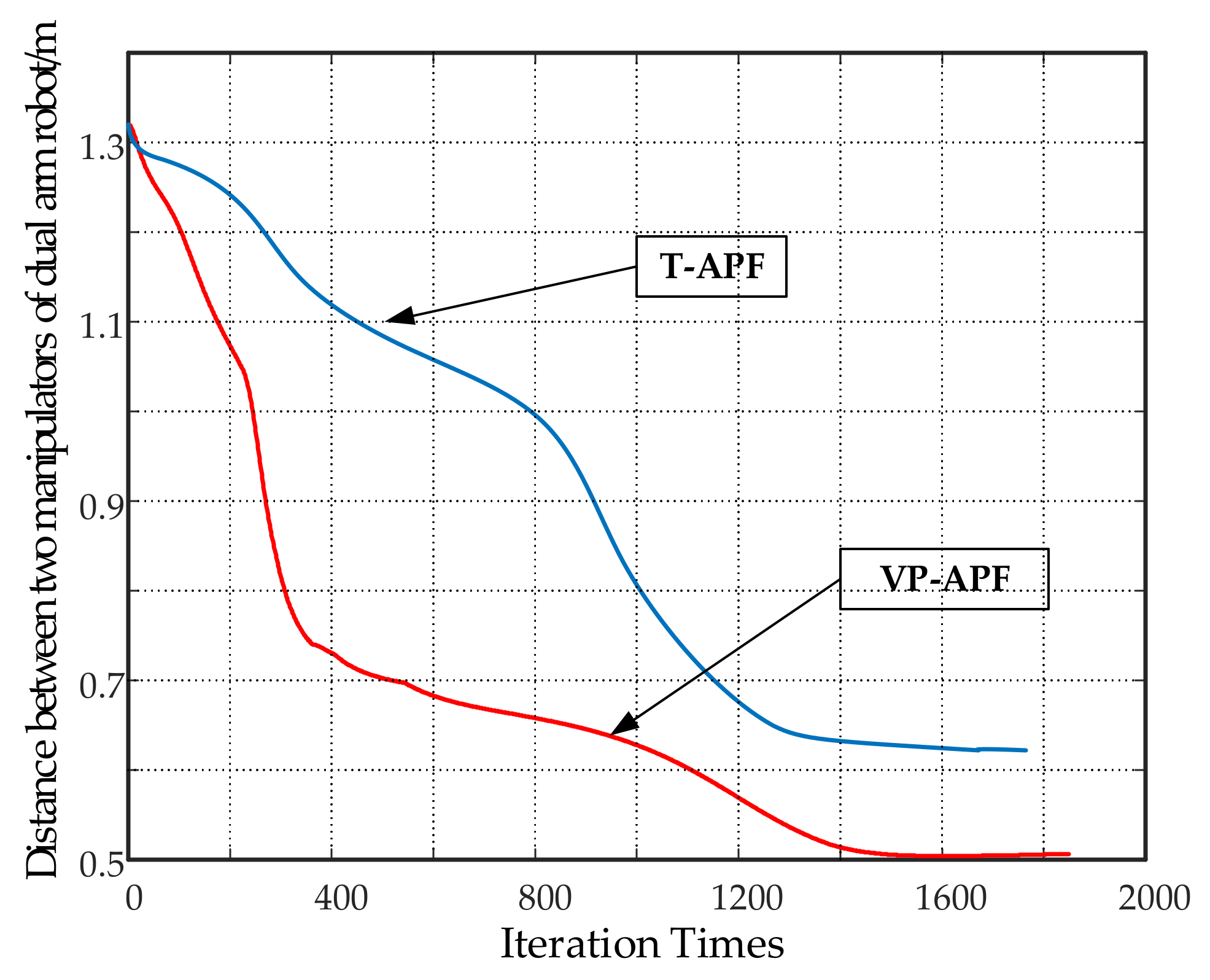
| Algorithms | Simulation Time/s | Iterations Times | Distance |
|---|---|---|---|
| T-APF | 124.375 | 1785 | 0.62 |
| VP-APF | 103.421 | 1856 | 0.51 |
| Link i | Mass | Centroid Coordinates | Moment of Inertia | ||
|---|---|---|---|---|---|
| Ixx | Iyy | Izz | |||
| 1 | 64.2 | 9.72 × 10−2; −10.5; 38.9 | 8.52 | 6.00 | 3.04 |
| 2 | 4.18 | 0.496; 595; 233 | 0.0463 | 0.0406 | 0.0303 |
| 3 | 3.29 | 0.496; 768; 233 | 0.0392 | 0.0333 | 0.0247 |
| 4 | 7.67 | 0.496; 988; 233 | 0.0654 | 0.0634 | 0.0352 |
| 5 | 3.29 | 0.496; 1208; 233 | 0.0392 | 0.0333 | 0.0247 |
| 6 | 7.67 | 0.496; 1408; 233 | 0.654 | 0.0634 | 0.0352 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, H.; Zhu, Y.; Liu, X.; Xu, X. Analysis of Obstacle Avoidance Strategy for Dual-Arm Robot Based on Speed Field with Improved Artificial Potential Field Algorithm. Electronics 2021, 10, 1850. https://doi.org/10.3390/electronics10151850
Zhang H, Zhu Y, Liu X, Xu X. Analysis of Obstacle Avoidance Strategy for Dual-Arm Robot Based on Speed Field with Improved Artificial Potential Field Algorithm. Electronics. 2021; 10(15):1850. https://doi.org/10.3390/electronics10151850
Chicago/Turabian StyleZhang, Hui, Yongfei Zhu, Xuefei Liu, and Xiangrong Xu. 2021. "Analysis of Obstacle Avoidance Strategy for Dual-Arm Robot Based on Speed Field with Improved Artificial Potential Field Algorithm" Electronics 10, no. 15: 1850. https://doi.org/10.3390/electronics10151850
APA StyleZhang, H., Zhu, Y., Liu, X., & Xu, X. (2021). Analysis of Obstacle Avoidance Strategy for Dual-Arm Robot Based on Speed Field with Improved Artificial Potential Field Algorithm. Electronics, 10(15), 1850. https://doi.org/10.3390/electronics10151850