
Alternative Measures of Dependence for Cyclic Behaviour Identification in the Signal with Impulsive Noise—Application to the Local Damage Detection



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
1.1. Local Damage Detection—A Brief Overview
1.2. Periodically Correlated Processes and Measures of Dependence
2. Problem Formulation
- The procedure for general auto-similarity map calculation is needed;
- The procedure for auto-similarity measures to be used in auto-similarity map is needed;
- The procedure of map quality evaluation is needed.
3. Methodology
| Algorithm 1: Auto-similarity maps calculation |
| Data: Input signal for Calculate spectrogram: where is a Hann window, is a number of frequency points, is a size of the overlapping and is a sample rate, Calculate automeasure: m—number of rows in matrix S n—number of columns in matrix S —function to calculate the value of measure for sub-signals and lag time k  |
3.1. Definition of Dependence Measures
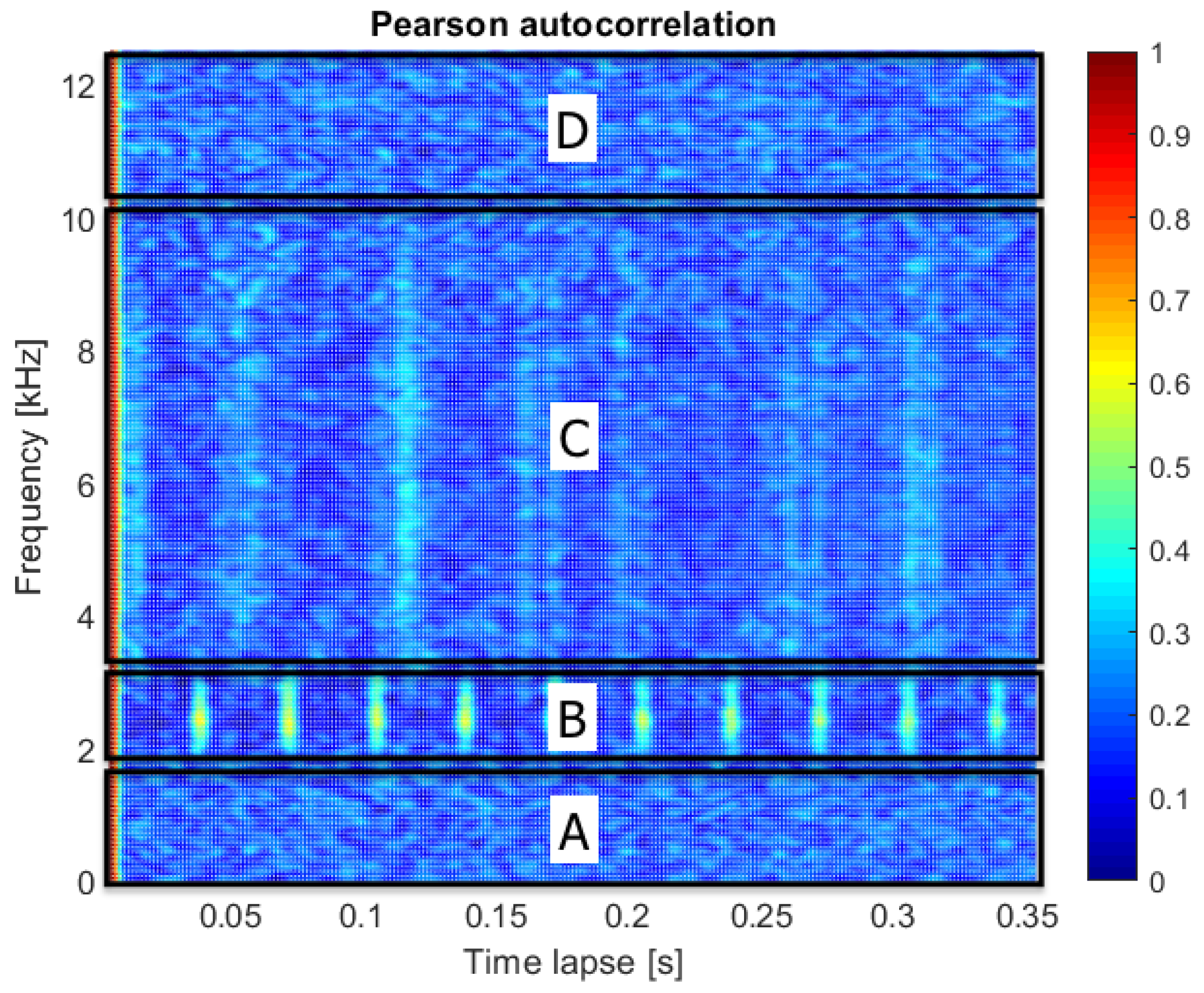
3.2. Pearson Autocorrelation
3.3. Autocodifference
3.4. Autocovariation
3.5. Spearman Autocorrelation
3.6. Kendall Autocorrelation
3.7. Quadrant Autocorrelation
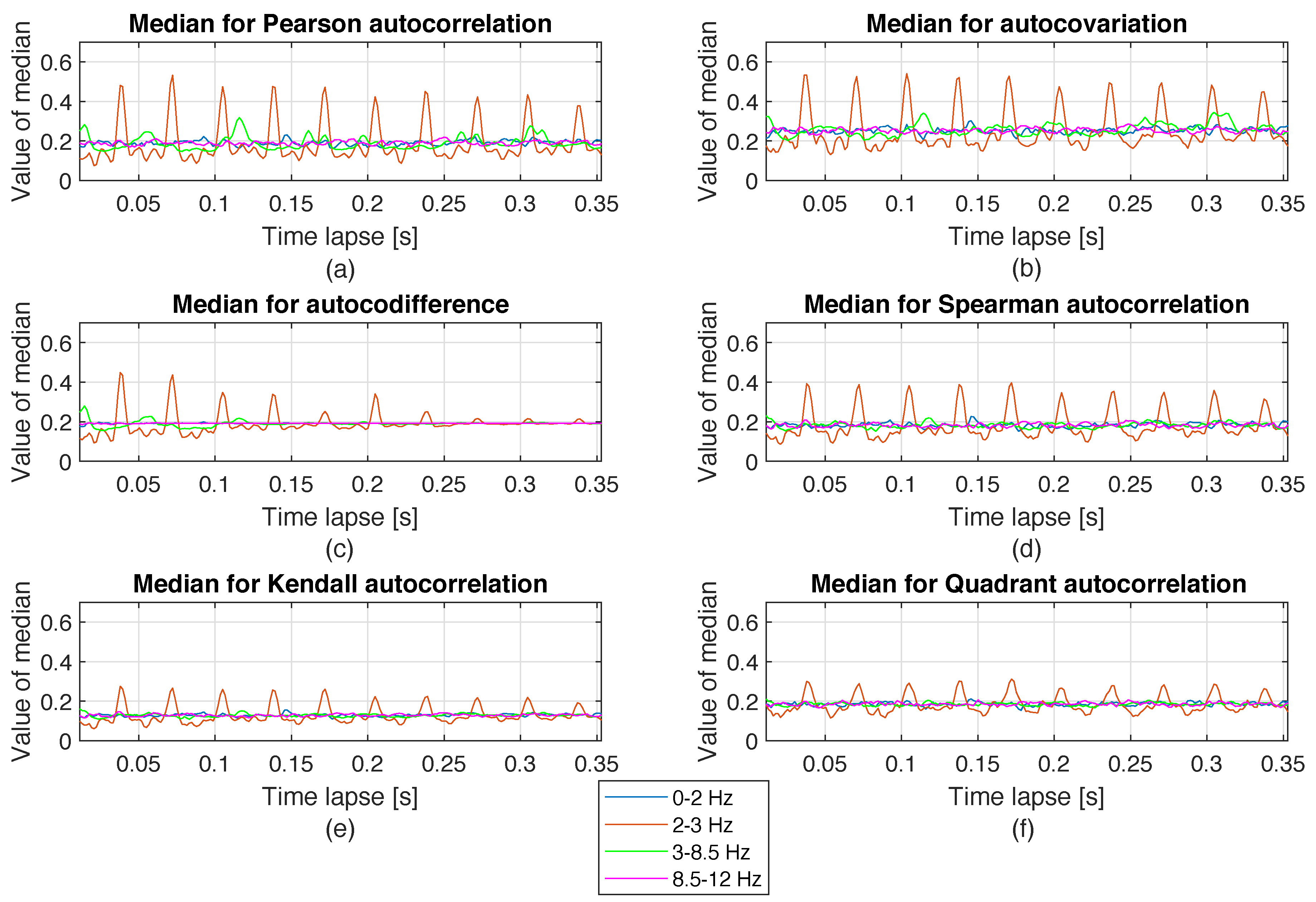
3.8. The Quality of Maps Criterion
| Algorithm 2: IMPI—Impulsiveness Indicator (the quality of map criterion) |
| Data: auto-similarity map: , F—frequency vector, range of the informative frequency band—, Calculate: —sample number of in vector F —sample number of in vector F n—number of columns in Calculate median:  Calculate: —maxima of the first 10 peaks on the medians’ vector Calculate ratio: |
4. Results
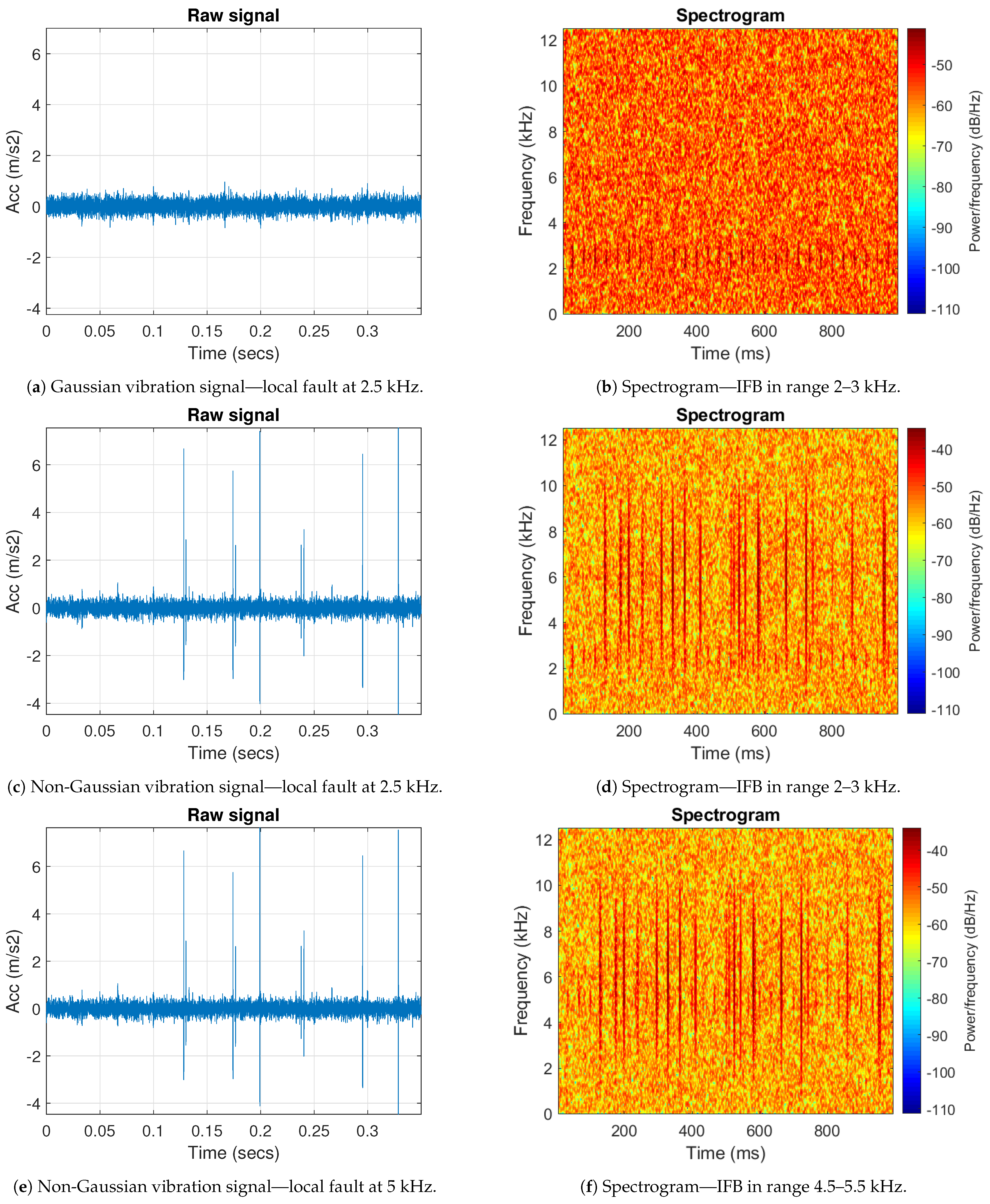
4.1. Analysis of the Simulated Data
4.2. Monte Carlo Simulations
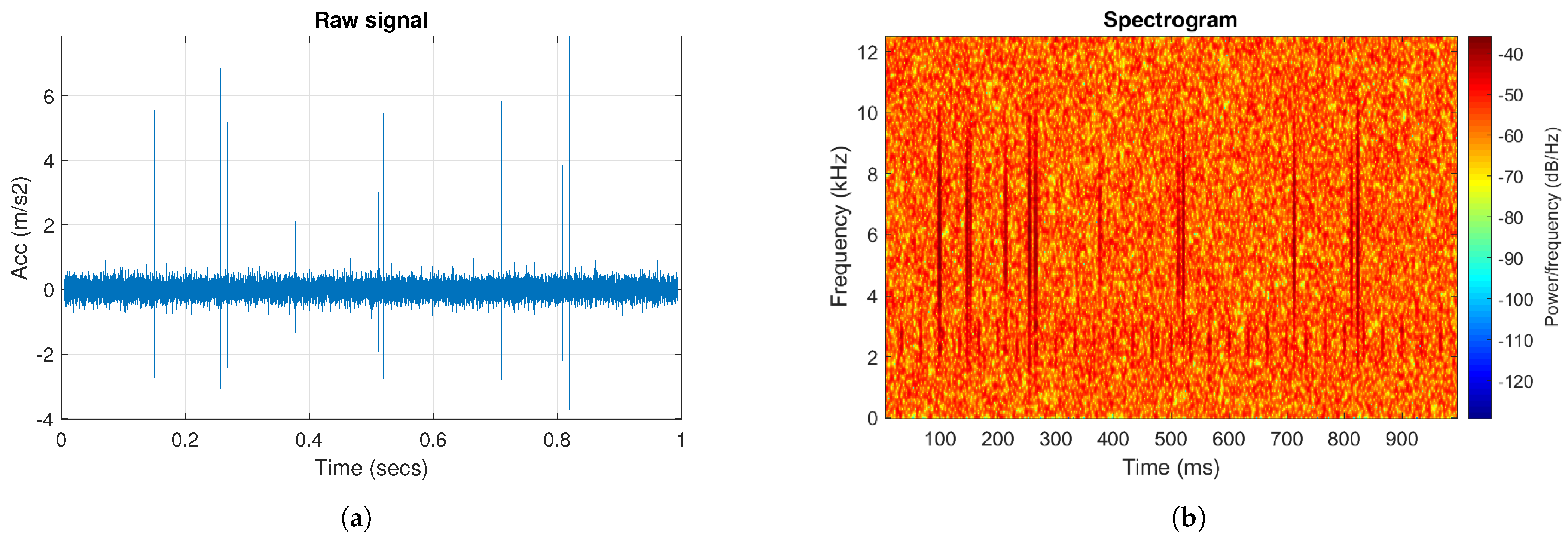
4.3. Analysis of the Real Vibration Data
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Bloomfield, P.; Hurd, H.L.; Lund, R.B. Periodic correlation in stratospheric ozone data. J. Time Ser. Anal. 1994, 15, 127–150. [Google Scholar] [CrossRef]
- Dargaville, R.J.; Doney, S.C.; Fung, I.Y. Inter-annual variability in the interhemispheric atmospheric CO2 gradient: Contributions from transport and the seasonal rectifier. Tellus B Chem. Phys. Meteorol. 2003, 55, 711–722. [Google Scholar] [CrossRef]
- Jones, R.H.; Brelsford, W.M. Time series with periodic structure. Biometrika 1967, 54, 403–408. [Google Scholar] [CrossRef]
- Bukofzer, D. Optimum and suboptimum detector performance for signals in cyclostationary noise. IEEE J. Ocean. Eng. 1987, 12, 97–115. [Google Scholar] [CrossRef] [Green Version]
- Hebda-Sobkowicz, J.; Gola, S.; Zimroz, R.; Wyłomańska, A. Identification and statistical analysis of impulse-like patterns of carbon monoxide variation in deep underground mines associated with the blasting procedure. Sensors 2019, 19, 2757. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hebda-Sobkowicz, J.; Gola, S.; Zimroz, R.; Wyłomańska, A. Pattern of H2S concentration in a deep copper mine and its correlation with ventilation schedule. Measurement 2019, 140, 373–381. [Google Scholar] [CrossRef]
- Broszkiewicz-Suwaj, E.; Makagon, A.; Weron, R.; Wyłomańska, A. On detecting and modeling periodic correlation in financial data. Phys. A Stat. Mech. Appl. 2004, 336, 196–205. [Google Scholar] [CrossRef]
- Franses, P.H. Periodicity and Stochastic Trends in Economic Time Series; OUP Catalogue; Oxford University Press: Oxford, UK, 1996. [Google Scholar]
- Antoni, J.; Bonnardot, F.; Raad, A.; El Badaoui, M. Cyclostationary modelling of rotating machine vibration signals. Mech. Syst. Signal Process. 2004, 18, 1285–1314. [Google Scholar] [CrossRef]
- Wyłomańska, A.; Zimroz, R.; Janczura, J.; Obuchowski, J. Impulsive noise cancellation method for copper ore crusher vibration signals enhancement. IEEE Trans. Ind. Electron. 2016, 63, 5612–5621. [Google Scholar] [CrossRef]
- Wyłomańska, A.; Żak, G.; Kruczek, P.; Zimroz, R. Application of tempered stable distribution for selection of optimal frequency band in gearbox local damage detection. Appl. Acoust. 2017, 128, 14–22. [Google Scholar] [CrossRef]
- Rachev, S.T.; Mittnik, S. Stable Paretian Models in Finance; Wiley: Hoboken, NJ, USA, 2000; Volume 7. [Google Scholar]
- Li, Q.; Liang, S.Y. Bearing incipient fault diagnosis based upon maximal spectral kurtosis TQWT and group sparsity total variation denoising approach. J. Vibroeng. 2018, 20, 1409–1425. [Google Scholar] [CrossRef] [Green Version]
- Li, Q.; Liang, S.Y. Incipient fault diagnosis of rolling bearings based on impulse-step impact dictionary and re-weighted minimizing nonconvex penalty Lq regular technique. Entropy 2017, 19, 421. [Google Scholar] [CrossRef] [Green Version]
- Yu, G.; Li, C.; Zhang, J. A new statistical modeling and detection method for rolling element bearing faults based on alpha–stable distribution. Mech. Syst. Signal Process. 2013, 41, 155–175. [Google Scholar] [CrossRef]
- Chen, Z.; Ding, S.X.; Peng, T.; Yang, C.; Gui, W. Fault detection for non-Gaussian processes using generalized canonical correlation analysis and randomized algorithms. IEEE Trans. Ind. Electron. 2017, 65, 1559–1567. [Google Scholar] [CrossRef]
- Kruczek, P.; Zimroz, R.; Wyłomańska, A. How to detect the cyclostationarity in heavy-tailed distributed signals. Signal Process. 2020, 172, 107514. [Google Scholar] [CrossRef]
- Kruczek, P.; Zimroz, R.; Antoni, J.; Wyłomańska, A. Generalized spectral coherence for cyclostationary signals with alpha-stable distribution. Mech. Syst. Signal Process. 2021, 159, 107737. [Google Scholar] [CrossRef]
- Żak, G.; Teuerle, M.; Wyłomańska, A.; Zimroz, R. Measures of dependence for α-stable distributed processes and its application to diagnostics of local damage in presence of impulsive noise. Shock Vib. 2017, 2017, 1963769. [Google Scholar] [CrossRef] [Green Version]
- Moshrefzadeh, A.; Fasana, A. The Autogram: An effective approach for selecting the optimal demodulation band in rolling element bearings diagnosis. Mech. Syst. Signal Process. 2018, 105, 294–318. [Google Scholar] [CrossRef]
- Randall, R.B. Vibration-Based Condition Monitoring: Industrial, Aerospace and Automotive Applications; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Kumar, A.; Gandhi, C.; Zhou, Y.; Kumar, R.; Xiang, J. Latest developments in gear defect diagnosis and prognosis: A review. Measurement 2020, 158, 107735. [Google Scholar] [CrossRef]
- Gao, M.; Yu, G.; Wang, T. Impulsive Gear Fault Diagnosis Using Adaptive Morlet Wavelet Filter Based on Alpha-Stable Distribution and Kurtogram. IEEE Access 2019, 7, 72283–72296. [Google Scholar] [CrossRef]
- Wodecki, J.; Stefaniak, P.; Obuchowski, J.; Wyłomańska, A.; Zimroz, R. Combination of principal component analysis and time–frequency representations of multichannel vibration data for gearbox fault detection. J. Vibroeng. 2016, 18, 2167–2175. [Google Scholar]
- Randall, R.B.; Antoni, J.; Chobsaard, S. The relationship between spectral correlation and envelope analysis in the diagnostics of bearing faults and other cyclostationary machine signals. Mech. Syst. Signal Process. 2001, 15, 945–962. [Google Scholar] [CrossRef]
- Abboud, D.; Antoni, J.; Sieg-Zieba, S.; Eltabach, M. Envelope analysis of rotating machine vibrations in variable speed conditions: A comprehensive treatment. Mech. Syst. Signal Process. 2017, 84, 200–226. [Google Scholar] [CrossRef]
- Lin, J.; Zuo, M. Gearbox fault diagnosis using adaptive wavelet filter. Mech. Syst. Signal Process. 2003, 17, 1259–1269. [Google Scholar] [CrossRef]
- Peng, Z.; Chu, F. Application of the wavelet transform in machine condition monitoring and fault diagnostics: A review with bibliography. Mech. Syst. Signal Process. 2004, 18, 199–221. [Google Scholar] [CrossRef]
- Qiu, H.; Lee, J.; Lin, J.; Yu, G. Wavelet filter-based weak signature detection method and its application on rolling element bearing prognostics. J. Sound Vib. 2006, 289, 1066–1090. [Google Scholar] [CrossRef]
- Yan, R.; Gao, R.X.; Chen, X. Wavelets for fault diagnosis of rotary machines: A review with applications. Signal Process. 2014, 96, 1–15. [Google Scholar] [CrossRef]
- Bakhtazad, A.; Palazoglu, A.; Romagnoli, J.A. Detection and classification of abnormal process situations using multidimensional wavelet domain hidden Markov trees. Comput. Chem. Eng. 2000, 24, 769–775. [Google Scholar] [CrossRef]
- Kwan, C.; Zhang, X.; Xu, R.; Haynes, L. A novel approach to fault diagnostics and prognostics. In Proceedings of the 2003 IEEE International Conference on Robotics and Automation (Cat. No. 03CH37422), Taipei, Taiwan, 14–19 September 2003; Volume 1, pp. 604–609. [Google Scholar]
- Zhang, X.; Xu, R.; Kwan, C.; Liang, S.Y.; Xie, Q.; Haynes, L. An integrated approach to bearing fault diagnostics and prognostics. In Proceedings of the 2005, American Control Conference, Portland, OR, USA, 8–10 June 2005; pp. 2750–2755. [Google Scholar]
- Lei, Y.; Lin, J.; He, Z.; Zuo, M.J. A review on empirical mode decomposition in fault diagnosis of rotating machinery. Mech. Syst. Signal Process. 2013, 35, 108–126. [Google Scholar] [CrossRef]
- Antoni, J. Fast computation of the kurtogram for the detection of transient faults. Mech. Syst. Signal Process. 2007, 21, 108–124. [Google Scholar] [CrossRef]
- Antoni, J. The spectral kurtosis: A useful tool for characterising non-stationary signals. Mech. Syst. Signal Process. 2006, 20, 282–307. [Google Scholar] [CrossRef]
- Barszcz, T.; Jabłoński, A. A novel method for the optimal band selection for vibration signal demodulation and comparison with the Kurtogram. Mech. Syst. Signal Process. 2011, 25, 431–451. [Google Scholar] [CrossRef]
- Antoni, J. The infogram: Entropic evidence of the signature of repetitive transients. Mech. Syst. Signal Process. 2016, 74, 73–94. [Google Scholar] [CrossRef]
- Miao, Y.; Zhao, M.; Lin, J. Improvement of kurtosis-guided-grams via Gini index for bearing fault feature identification. Meas. Sci. Technol. 2017, 28, 125001. [Google Scholar] [CrossRef]
- Combet, F.; Gelman, L. Optimal filtering of gear signals for early damage detection based on the spectral kurtosis. Mech. Syst. Signal Process. 2009, 23, 652–668. [Google Scholar] [CrossRef]
- Wodecki, J.; Michalak, A.; Zimroz, R. Optimal filter design with progressive genetic algorithm for local damage detection in rolling bearings. Mech. Syst. Signal Process. 2018, 102, 102–116. [Google Scholar] [CrossRef]
- Abboud, D.; Marnissi, Y.; Elbadaoui, M. Optimal filtering of angle-time cyclostationary signals: Application to vibrations recorded under nonstationary regimes. Mech. Syst. Signal Process. 2020, 145, 106919. [Google Scholar] [CrossRef]
- Antoni, J. Cyclostationarity by examples. Mech. Syst. Signal Process. 2009, 23, 987–1036. [Google Scholar] [CrossRef]
- Antoni, J. Cyclic spectral analysis of rolling-element bearing signals: Facts and fictions. J. Sound Vib. 2007, 304, 497–529. [Google Scholar] [CrossRef]
- Wang, D.; Zhao, X.; Kou, L.L.; Qin, Y.; Zhao, Y.; Tsui, K.L. A simple and fast guideline for generating enhanced/squared envelope spectra from spectral coherence for bearing fault diagnosis. Mech. Syst. Signal Process. 2019, 122, 754–768. [Google Scholar] [CrossRef]
- Chen, Z.; Mauricio, A.; Li, W.; Gryllias, K. A deep learning method for bearing fault diagnosis based on cyclic spectral coherence and convolutional neural networks. Mech. Syst. Signal Process. 2020, 140, 106683. [Google Scholar] [CrossRef]
- Gröchenig, K. Foundations of Time-Frequency Analysis; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2001. [Google Scholar]
- Daubechies, I. Ten Lectures on Wavelets; SIAM: Philadelphia, PA, USA, 1992. [Google Scholar]
- Mallat, S. A Wavelet Tour of Signal Processing; Elsevier: Amsterdam, The Netherlands, 1999. [Google Scholar]
- Grzesiek, A.; Michalak, A.; Wylomanska, A. How to describe the linear dependence for heavy-tailed distributed data. In Applied Condition Monitoring; A Book Series; Springer: Berlin/Heidelberg, Germany, 2021. [Google Scholar]
- Nowicki, J.; Hebda-Sobkowicz, J.; Zimroz, R.; Wylomanska, A. Local Defect Detection in Bearings in the Presence of Heavy-Tailed Noise and Spectral Overlapping of Informative and Non-Informative Impulses. Sensors 2020, 20, 6444. [Google Scholar] [CrossRef] [PubMed]
- Żak, G.; Obuchowski, J.; Wyłomańska, A.; Zimroz, R. Novel 2D representation of vibration for local damage detection. Min. Sci. 2014, 21, 105–113. [Google Scholar]
- Żak, G.; Wyłomańska, A.; Zimroz, R. Periodically impulsive behavior detection in noisy observation based on generalized fractional order dependency map. Appl. Acoust. 2019, 144, 31–39. [Google Scholar] [CrossRef]
- Nowicki, J.; Hebda-Sobkowicz, J.; Zimroz, R.; Wyłomańska, A. Dependency measures for the diagnosis of local faults in application to the heavy-tailed vibration signal. Appl. Acoust. 2021, 178, 107974. [Google Scholar] [CrossRef]
- Borghesani, P.; Antoni, J. CS2 analysis in presence of non-Gaussian background noise–Effect on traditional estimators and resilience of log-envelope indicators. Mech. Syst. Signal Process. 2017, 90, 378–398. [Google Scholar] [CrossRef]
- Wodecki, J.; Michalak, A.; Zimroz, R.; Barszcz, T.; Wyłomańska, A. Impulsive source separation using combination of Nonnegative Matrix Factorization of bi-frequency map, spatial denoising and Monte Carlo simulation. Mech. Syst. Signal Process. 2019, 127, 89–101. [Google Scholar] [CrossRef]
- Hebda-Sobkowicz, J.; Zimroz, R.; Wyłomańska, A. Selection of the Informative Frequency Band in a Bearing Fault Diagnosis in the Presence of Non-Gaussian Noise—Comparison of Recently Developed Methods. Appl. Sci. 2020, 10, 2657. [Google Scholar] [CrossRef] [Green Version]
- Żak, G.; Wyłomańska, A.; Zimroz, R. Application of alpha-stable distribution approach for local damage detection in rotating machines. J. Vibroeng. 2015, 17, 2987–3002. [Google Scholar]
- Wang, D. Some further thoughts about spectral kurtosis, spectral L2/L1 norm, spectral smoothness index and spectral Gini index for characterizing repetitive transients. Mech. Syst. Signal Process. 2018, 108, 360–368. [Google Scholar] [CrossRef]
- Hebda-Sobkowicz, J.; Zimroz, R.; Pitera, M.; Wylomanska, A. Informative frequency band selection in the presence of non-Gaussian noise—A novel approach based on the conditional variance statistic with application to bearing fault diagnosis. Mech. Syst. Signal Process. 2020, 145, 106971. [Google Scholar] [CrossRef]
- Kruczek, P.; Obuchowski, J. Modified Protrugram Method for Damage Detection in Bearing Operating Under Impulsive Load. In Cyclostationarity: Theory and Methods III; Springer International Publishing: Cham, Switzerland, 2017; pp. 229–240. [Google Scholar]
- Schmidt, S.; Zimroz, R.; Chaari, F.; Heyns, P.S.; Haddar, M. A simple condition monitoring method for gearboxes operating in impulsive environments. Sensors 2020, 20, 2115. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Luan, S.; Qiu, T.; Zhu, Y.; Yu, L. Cyclic correntropy and its spectrum in frequency estimation in the presence of impulsive noise. Signal Process. 2016, 120, 503–508. [Google Scholar] [CrossRef]
- Zhao, X.; Qin, Y.; He, C.; Jia, L.; Kou, L. Rolling element bearing fault diagnosis under impulsive noise environment based on cyclic correntropy spectrum. Entropy 2019, 21, 50. [Google Scholar] [CrossRef] [Green Version]
- Wodecki, J.; Michalak, A.; Zimroz, R. Local damage detection based on vibration data analysis in the presence of Gaussian and heavy-tailed impulsive noise. Measurement 2021, 169, 108400. [Google Scholar] [CrossRef]
- Boashash, B. Time-Frequency Signal Analysis and Processing: A Comprehensive Reference; Academic Press: Cambridge, MA, USA, 2015. [Google Scholar]
- Dunn, O.J.; Clark, V.A. Basic Statistics: A Primer for the Biomedical Sciences; John Wiley & Sons: Hoboken, NJ, USA, 2009. [Google Scholar]
- Box, G.E.; Jenkins, G.M.; Reinsel, G.C.; Ljung, G.M. Time Series Analysis: Forecasting and Control; John Wiley & Sons: Hoboken, NJ, USA, 2015. [Google Scholar]
- Balakrishnan, N.; Lai, C.D. Continuous Bivariate Distributions; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- Che, Y.; Jia, Y.; Tang, Z.; LAN, F. Application of Pearson correlation coefficient in wind power combination prediction. Guangxi Electr. Power 2016, 3, 50–53. [Google Scholar]
- Samorodnitsky, G.; Taqqu, M. Stable Non-Gaussian Random Processes: Stochastic Models with Infinite Variance; Chapman and Hall: London, UK, 1994. [Google Scholar]
- Wyłomańska, A.; Chechkin, A.; Gajda, J.; Sokolov, I.M. Codifference as a practical tool to measure interdependence. Phys. A Stat. Mech. Appl. 2015, 421, 412–429. [Google Scholar] [CrossRef] [Green Version]
- Ma, X.; Nikias, C.L. Joint estimation of time delay and frequency delay in impulsive noise using fractional lower order statistics. IEEE Trans. Signal Process. 1996, 44, 2669–2687. [Google Scholar]
- Kendall, M.; Gibbons, J.D. Rank Correlation Methods, 5th ed.; Charles Griffin Book Series; Oxford University Press: Oxford, UK, 1990. [Google Scholar]
- Trivedi, P.K.; Zimmer, D.M. Copula Modeling: An Introduction for Practitioners; Now Publishers Inc.: Boston, MA, USA, 2007. [Google Scholar]
- Dürre, A.; Fried, R.; Liboschik, T. Robust estimation of (partial) autocorrelation. Wiley Interdiscip. Rev. Comput. Stat. 2015, 7, 205–222. [Google Scholar] [CrossRef]
- Croux, C.; Dehon, C. Influence functions of the Spearman and Kendall correlation measures. Stat. Methods Appl. 2010, 19, 497–515. [Google Scholar] [CrossRef] [Green Version]



















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hebda-Sobkowicz, J.; Nowicki, J.; Zimroz, R.; Wyłomańska, A. Alternative Measures of Dependence for Cyclic Behaviour Identification in the Signal with Impulsive Noise—Application to the Local Damage Detection. Electronics 2021, 10, 1863. https://doi.org/10.3390/electronics10151863
Hebda-Sobkowicz J, Nowicki J, Zimroz R, Wyłomańska A. Alternative Measures of Dependence for Cyclic Behaviour Identification in the Signal with Impulsive Noise—Application to the Local Damage Detection. Electronics. 2021; 10(15):1863. https://doi.org/10.3390/electronics10151863
Chicago/Turabian StyleHebda-Sobkowicz, Justyna, Jakub Nowicki, Radosław Zimroz, and Agnieszka Wyłomańska. 2021. "Alternative Measures of Dependence for Cyclic Behaviour Identification in the Signal with Impulsive Noise—Application to the Local Damage Detection" Electronics 10, no. 15: 1863. https://doi.org/10.3390/electronics10151863
APA StyleHebda-Sobkowicz, J., Nowicki, J., Zimroz, R., & Wyłomańska, A. (2021). Alternative Measures of Dependence for Cyclic Behaviour Identification in the Signal with Impulsive Noise—Application to the Local Damage Detection. Electronics, 10(15), 1863. https://doi.org/10.3390/electronics10151863