
Accurate Realtime Motion Estimation Using Optical Flow on an Embedded System



Abstract
:1. Introduction
2. Related Work
2.1. The Principal Method for Optical Flow Calculation
2.1.1. Matching Technique
2.1.2. Differential Method
2.2. Optical Flow Overview
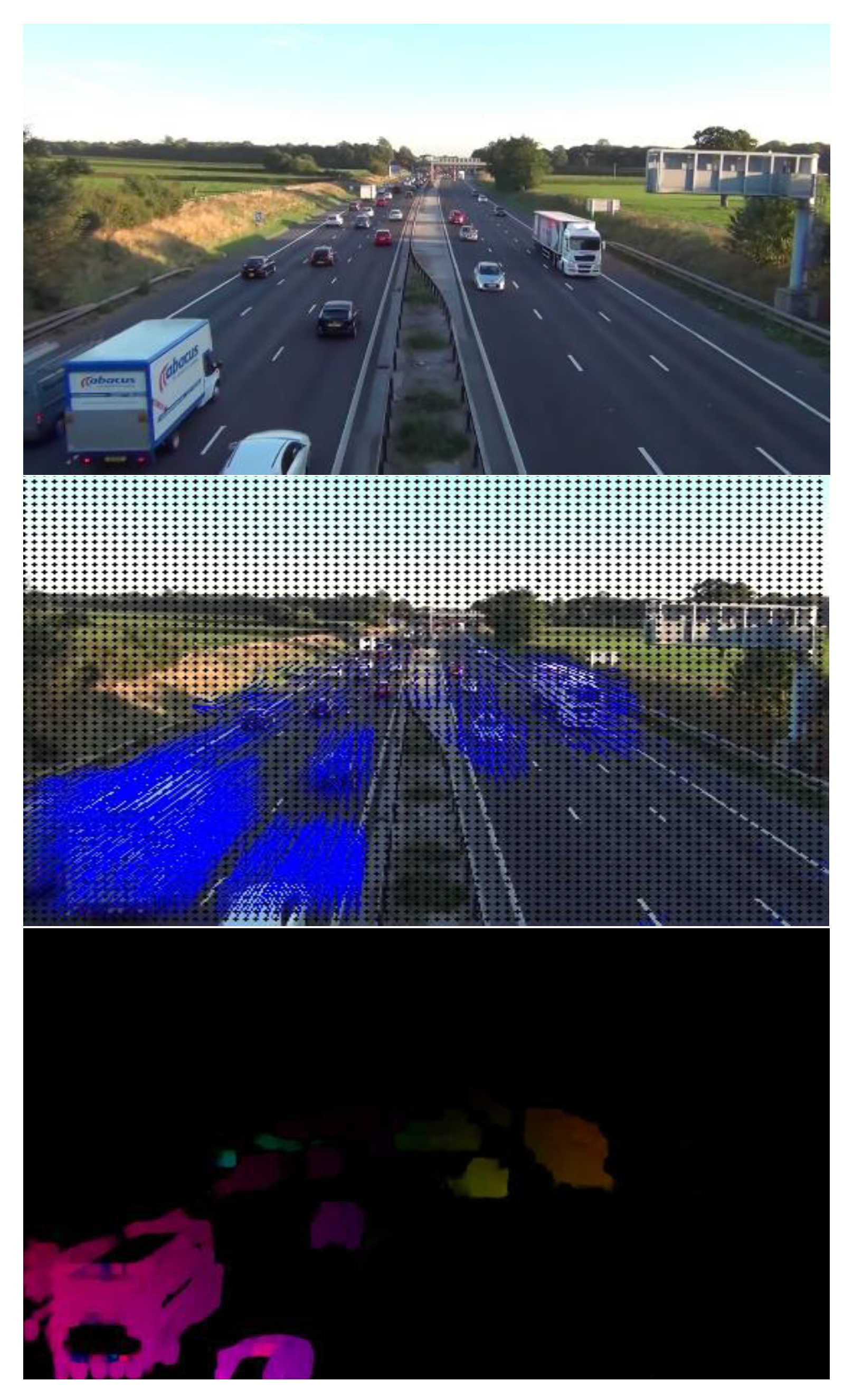
3. Approach Overview and Results
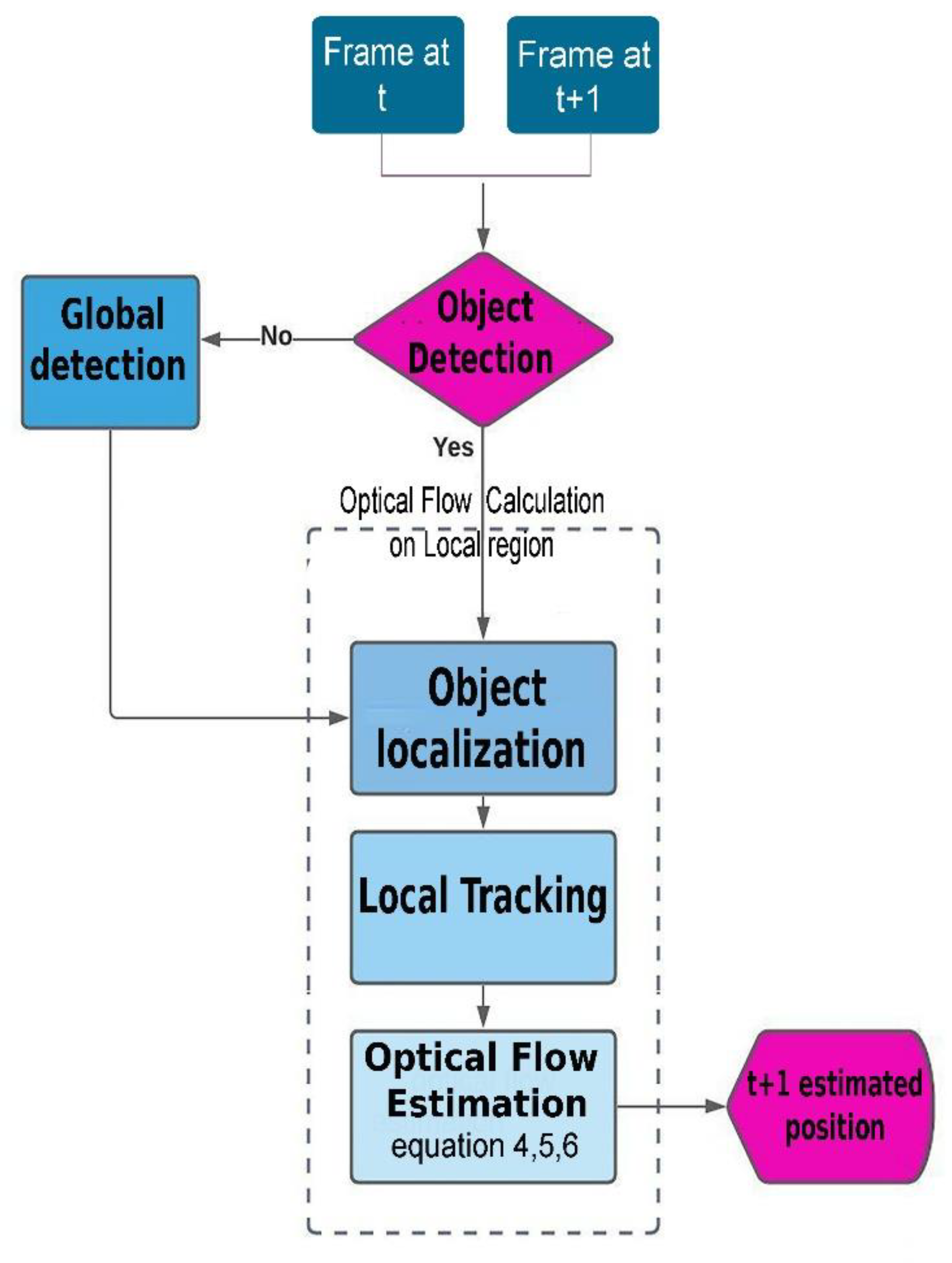
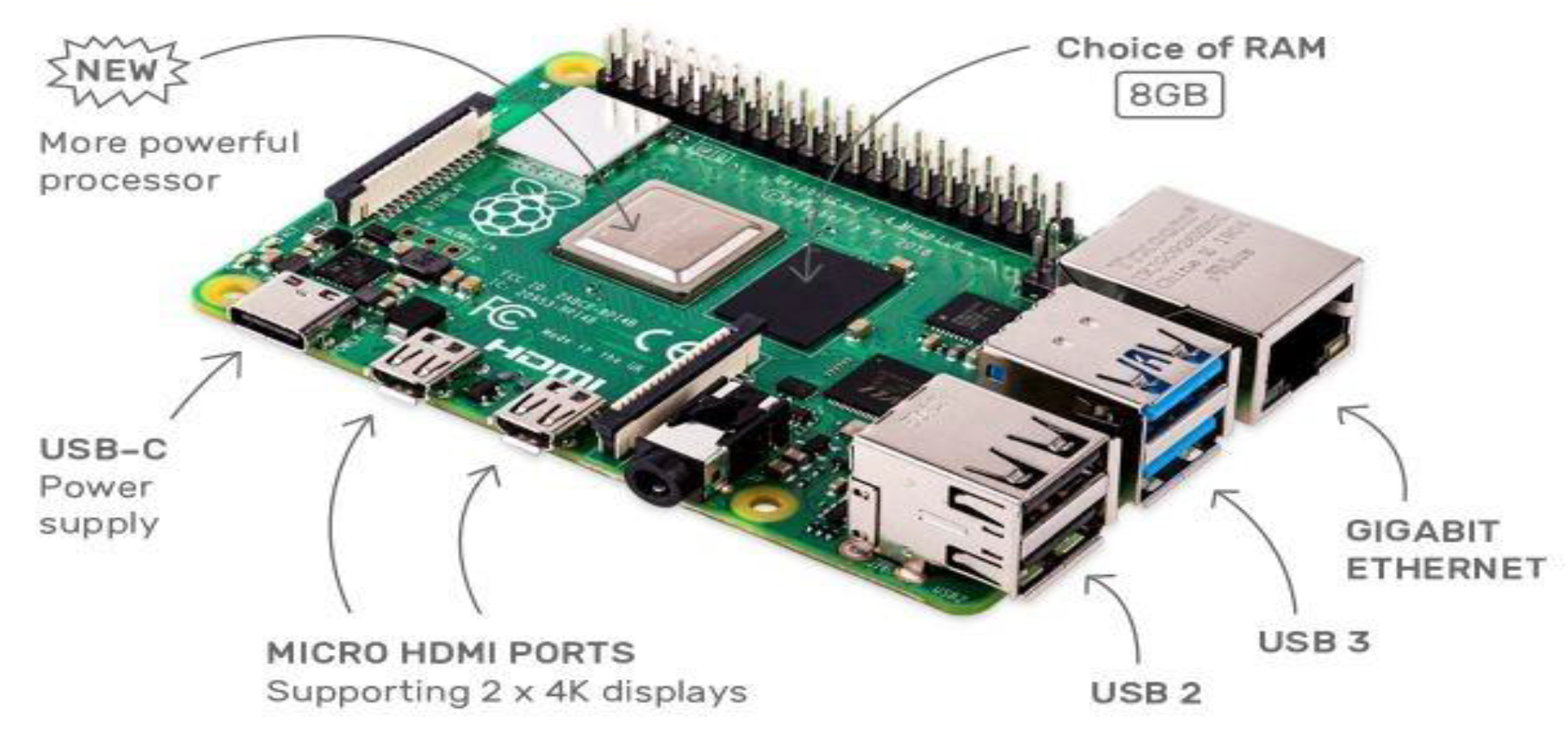
3.1. Approach Overview
3.2. Improvement
- Iterative refinement: The main idea of this technique was to execute the algorithm n times related to the previous results. Therefore, it enabled a reduction in the direct error at each iteration. However, the run time rose depending on the iteration number. Then, the method converged when the algorithm was stable [23].
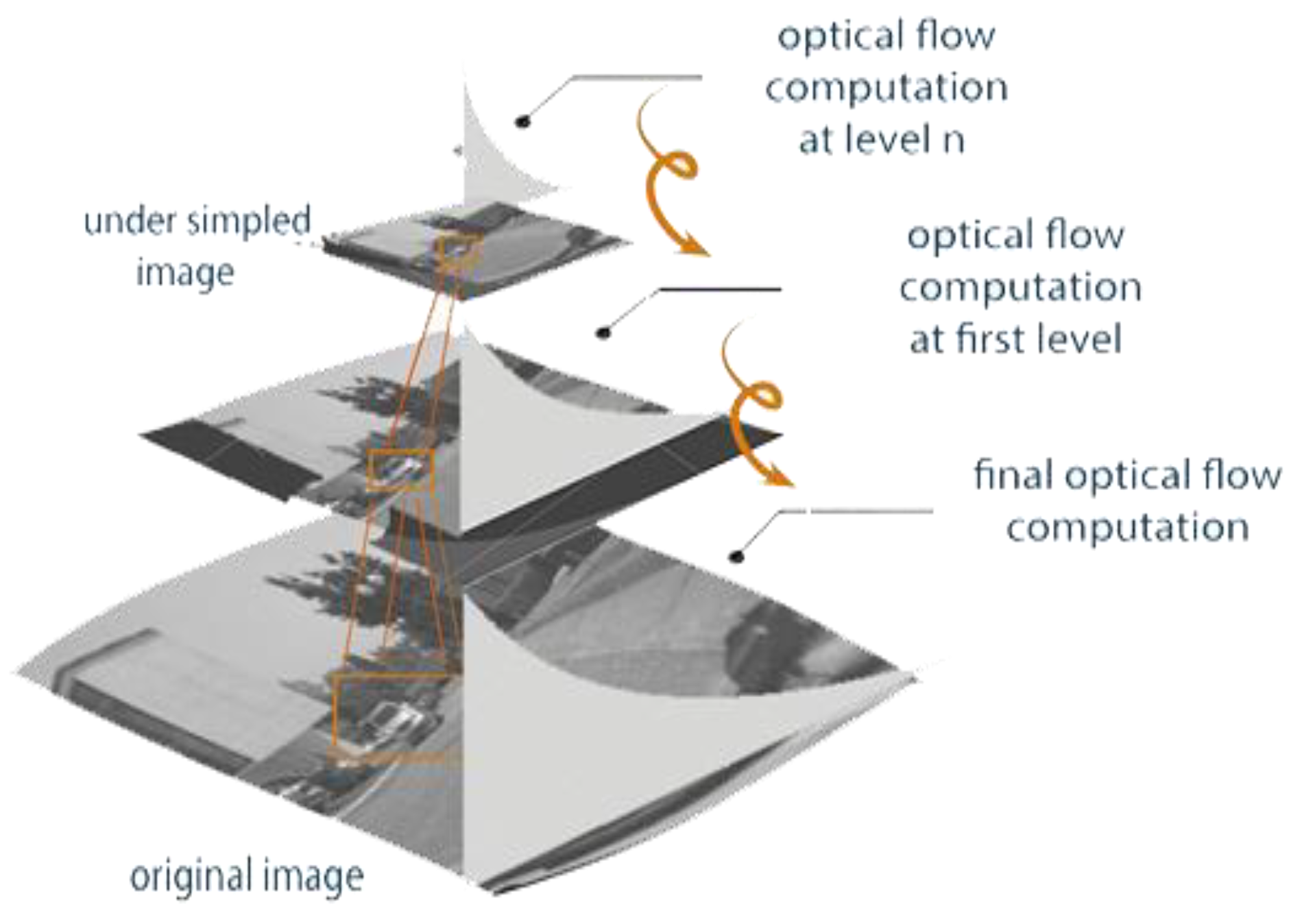
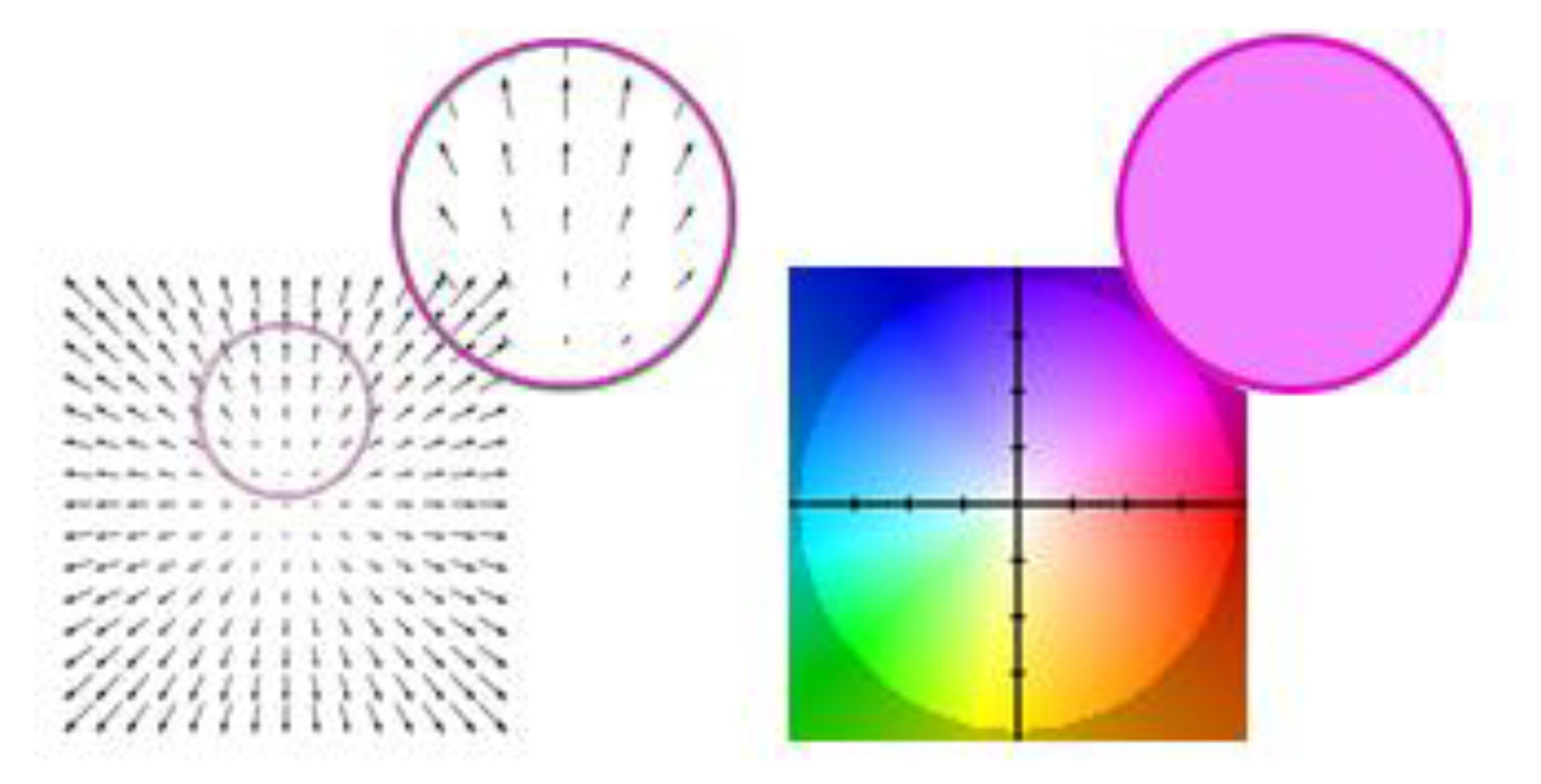
- Pyramidal implementation: the pyramid was produced by the resampling of successive frames. A pyramid was defined with various levels (Ln), typically in the range of two to four, as depicted in Figure 1. At each level of the pyramid, the image was subsampled by a factor of two for the two successive images considered. While level zero corresponded to the initial image, level Ln corresponded to the coarsest level [24]. At the Ln level, the optical flow was computed, which was then propagated to the lower level by translating image “f1” a priori calculated at a higher level. The algorithm was repeated to reach level zero, which corresponded to the initial image. Then, the final optical flow was recuperated [25]. This multiresolution approach reduced the volume of stones and improved the results of treatments.
3.3. Algorithm
| Algorithm 1 Pseudo code for min algorithm of pyramidal refinement |
| input: frame 1, frame 2, level number, patch size |
| pretreatment and filtering |
| pyramid building |
| for L = 0 to L = pyramid level do |
| spatial and temporal derivation |
| velocity interpolation |
| for i = 0 to i = iteration number do |
| optical flow refinement |
| computing final optical flow |
| output: final optical flow |
3.4. Optimization
4. Result and Discussion
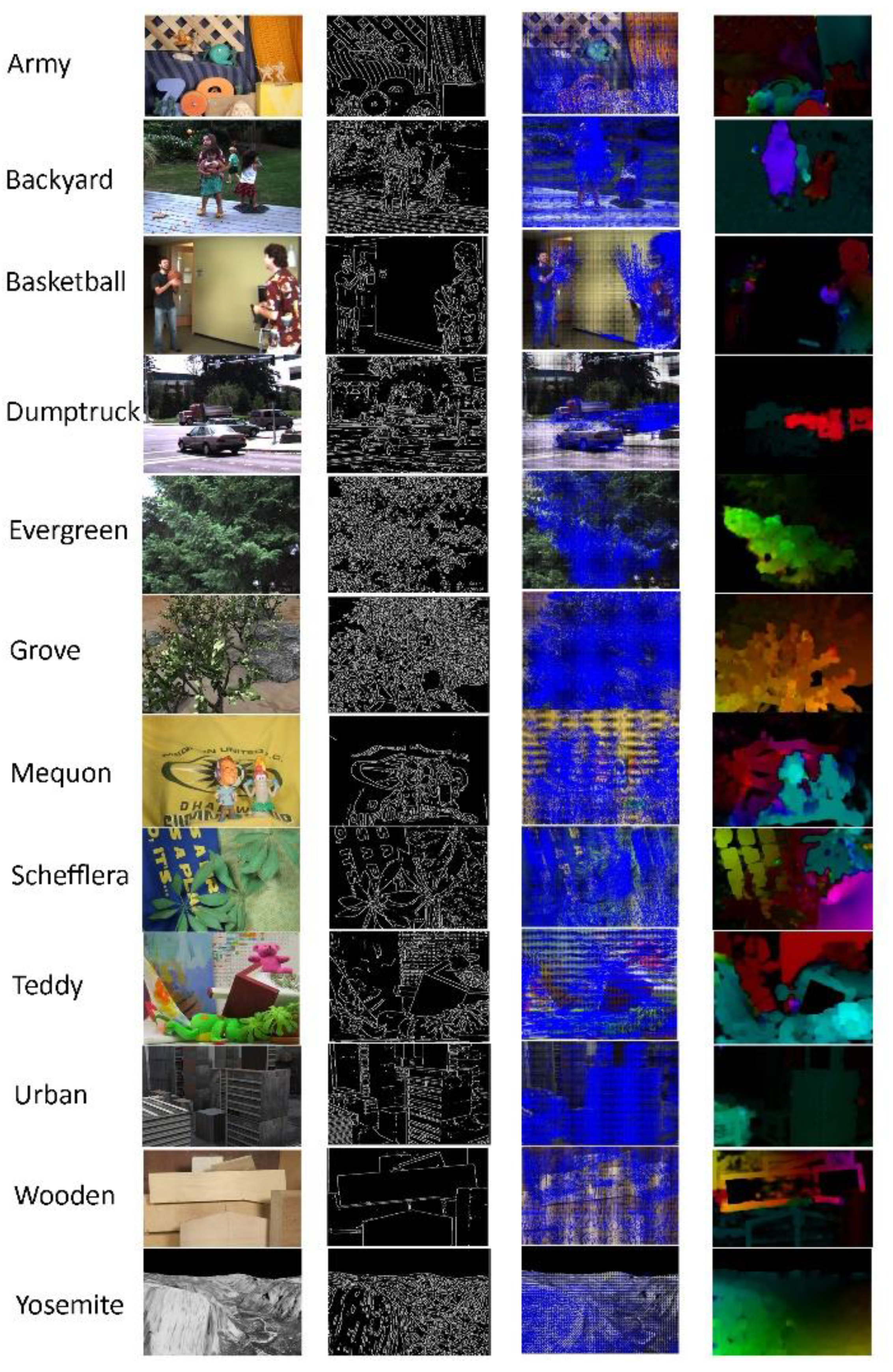
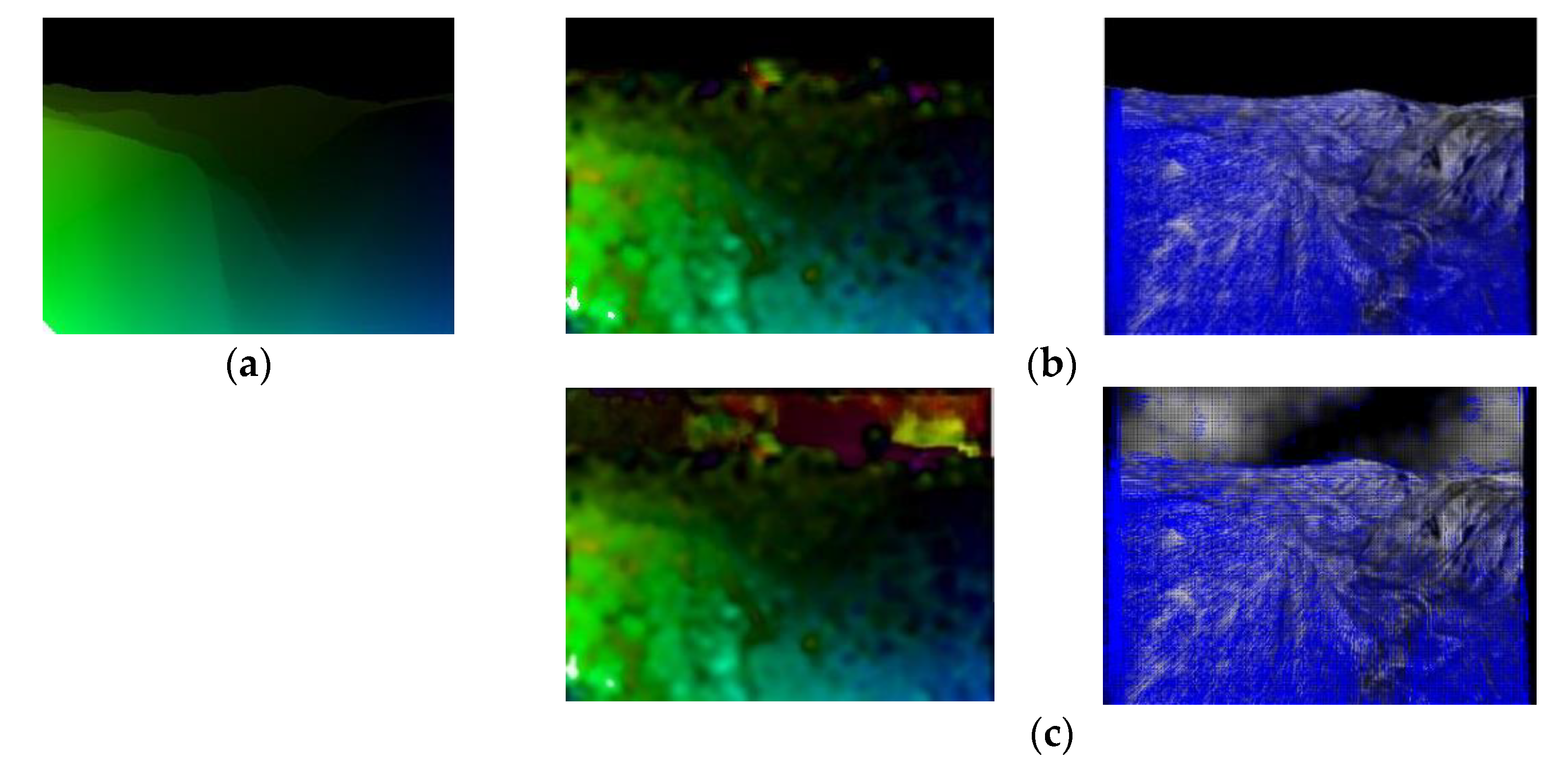
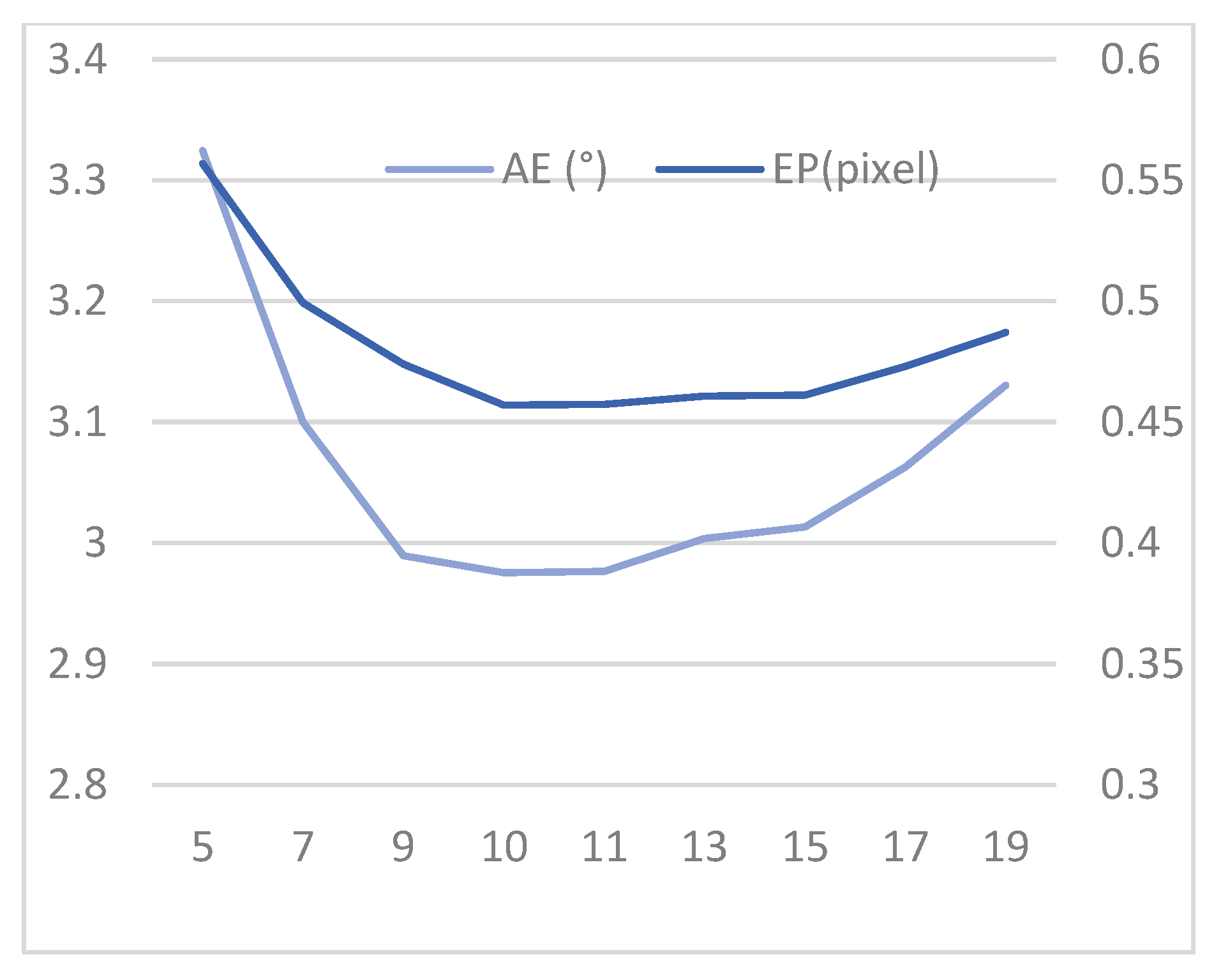
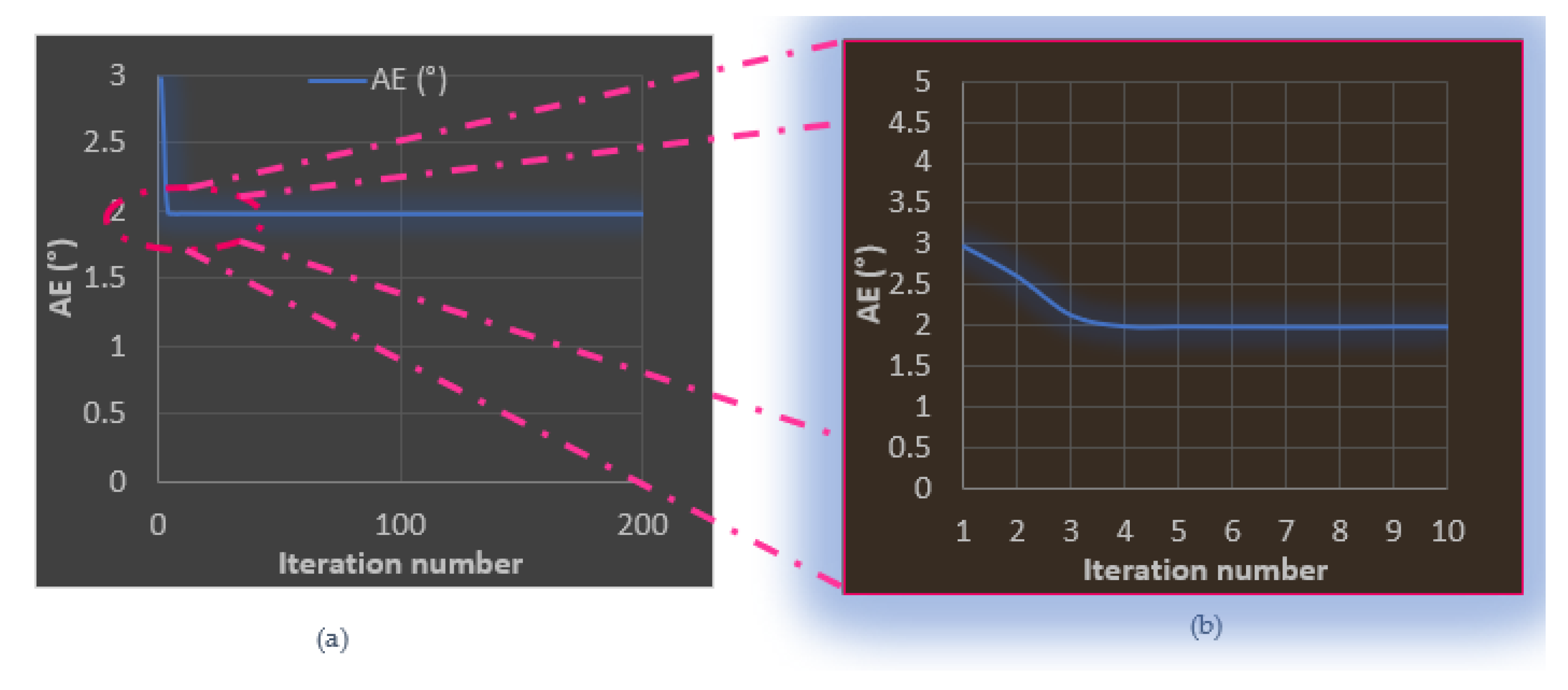
4.1. Evaluation
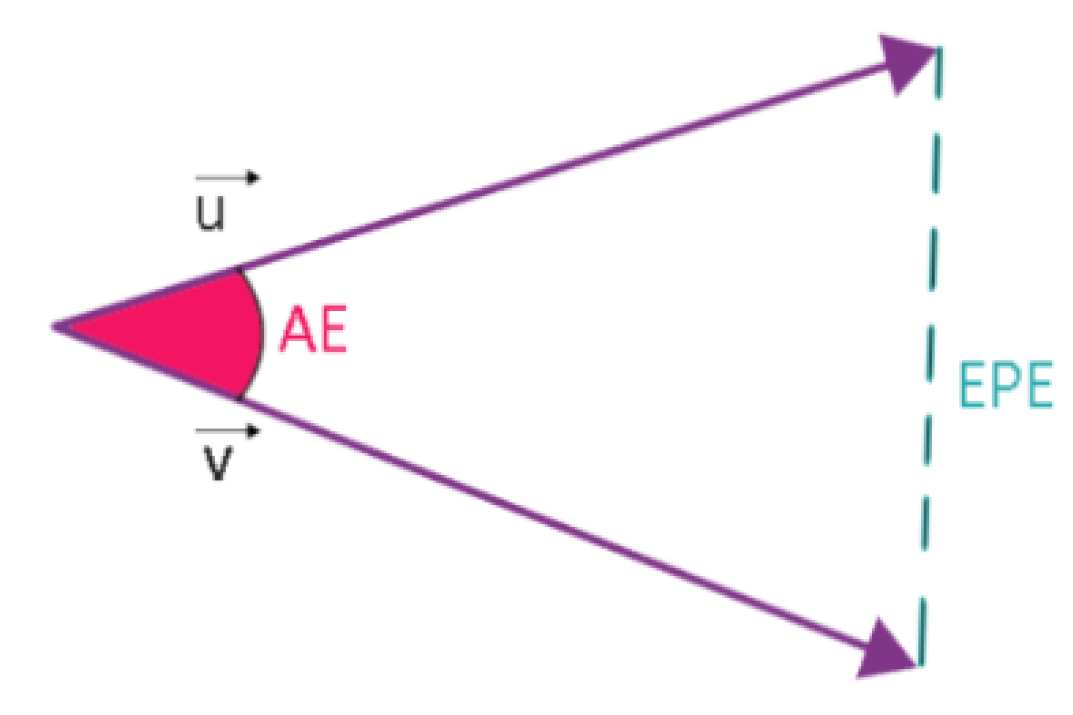
4.2. Error Measurement
4.3. Comparison
4.4. Computational Coast
4.5. Run Time
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Liu, J.; Gong, S.; Guan, W.; Li, B.; Li, H.; Liu, J. Tracking and Localization based on Multi-angle Vision for Underwater Target. Electronics 2020, 9, 1871. [Google Scholar] [CrossRef]
- Ren, G.; Dai, T.; Barmpoutis, P.; Stathaki, T. Salient Object Detection Combining a Self-Attention Module and a Feature Pyramid Network. Electronics 2020, 9, 1702. [Google Scholar] [CrossRef]
- Joris, H. TracTrac: A fast multi-object tracking algorithm for motion estimation. Comput. Geosci. 2019, 128, 11–18. [Google Scholar]
- Thenmozhi, T.; Kalpana, A.M. Adaptive motion estimation and sequential outline separation based moving object detection in video surveillance system. Microprocess. Microsyst. 2020, 76, 103084. [Google Scholar] [CrossRef]
- Mahraz, M.A.; Riffi, J.; Tairi, H. High accuracy optical flow estimation based on PDE decomposition Signal. Image Video Process. 2015, 9, 1409–1418. [Google Scholar] [CrossRef]
- Mileva, Y.; Bruhn, A.; Weickert, J. Illumination-Robust Variational Optical Flow with Photometric Invariants. In Joint Pattern Recognition Symposium; Springer: Berlin/Heidelberg, Germany, 2007; pp. 152–162. [Google Scholar]
- Chen, P.; Zhang, X.; Yuen, P.C.; Mao, A. Combination of spatio-temporal and transform domain for sparse occlusion estimation by optical flow. Neurocomputing 2016, 214, 368–375. [Google Scholar] [CrossRef]
- Liao, B.; Hu, J.; Gilmore, R.O. Optical flow estimation combining with illumination adjustment and edge refinement in livestock UAV videos. Comput. Electron. Agric. 2021, 180, 105910. [Google Scholar] [CrossRef]
- Khalid, M.; Pénard, L.; Mémin, E. Optical flow for image-based river velocity estimation. Flow Meas. Instrum. 2019, 65, 110–121. [Google Scholar] [CrossRef] [Green Version]
- Zhao, B.; Huang, Y.; Wei, H.; Hu, X. Ego-Motion Estimation Using Recurrent Convolutional Neural Networks through Optical Flow Learning. Electronics 2021, 10, 222. [Google Scholar] [CrossRef]
- Kalboussi, R.; Azaza, A.; Abdellaoui, M.; Douik, A. Detecting video saliency via local motion estimation. In Proceedings of the Computer Systems and Applications (AICCSA), 2017 IEEE/ACS 14th International Conference, Hammamet, Tunisia, 30 October–3 November 2017; pp. 738–744. [Google Scholar]
- Sghaier, S.; Wajdi, F.; Chokri, S. Novel Technique for 3D Face Recognition Using Anthropometric Methodology. Int. J. Ambient. Comput. Intell. IJACI 2018, 9, 60–77. [Google Scholar] [CrossRef] [Green Version]
- Sun, D.; Roth, S.; Black, M.J. Secrets of optical flow estimation and their principles. In Proceedings of the 2010 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Francisco, CA, USA, 13–18 June 2010; pp. 2432–2439. [Google Scholar]
- Zhang, D.; He, L.; Tu, Z.; Zhang, S.; Han, F.; Yang, B. Learning motion representation for real-time spatio-temporal action localization. Pattern Recognit. 2020, 103, 107312. [Google Scholar] [CrossRef]
- Kim, C.; Song, D.; Kim, C.S.; Park, S.K. Object Tracking under Large Motion: Combining Coarse-to-fine Search with Superpixels. Inf. Sci. 2018, 480, 194–210. [Google Scholar] [CrossRef]
- Fredj, H.B.; Ltaif, M.; Ammar, A.; Souani, C. Parallel implementation of Sobel filter using CUDA. In Proceedings of the 2017 International Conference on Control, Automation and Diagnosis (ICCAD), Hammamet, Tunisia, 19–21 January 2017; pp. 209–212. [Google Scholar]
- Vishniakou, I.; Plöger, P.G.; Seelig, J.D. Virtual reality for animal navigation with camera-based optical flow tracking. J. Neurosci. Methods 2019, 327, 108403. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Zheng, J.; Zhang, C.; Li, B. An Effective Motion Object Detection Method Using Optical Flow Estimation under a Moving Camera. J. Vis. Commun. Image Represent. 2018, 55, 215–228. [Google Scholar] [CrossRef]
- Mahraz, M.A.; Riffi, J.; Tairi, H. Motion estimation using the fast and adaptive bidimensional empirical mode decomposition. J. Real-Time Image Process. 2014, 9, 491–501. [Google Scholar] [CrossRef]
- Deng, H.; Arif, U.; Yang, K.; Xi, Z.; Quan, Q.; Cai, K.Y. Global optical flow-based estimation of velocity for multicopters using monocular vision in GPS-denied environments. Optik 2020, 219, 164923. [Google Scholar] [CrossRef]
- Ghods, A.H.; Fu, L. Real-time estimation of turning movement counts at signalized intersections using signal phase information. Transp. Res. Part C Emerg. Technol. 2014, 47, 128–138. [Google Scholar] [CrossRef]
- Barron, J.L.; Fleet, D.J.; Beauchemin, S.S.; Burkitt, T.A. Performance of Optical Flow Techniques. Int. J. Comput. Vis. IJCV 1994, 12, 43–77. [Google Scholar] [CrossRef]
- Huang, H.-Y.; Liu, Z.-H. Stereo Matching with Spatiotemporal Disparity Refinement Using Simple Linear Iterative Clustering Segmentation. Electronics 2021, 10, 717. [Google Scholar] [CrossRef]
- Barron, J.; Klette, R. Quantitative Color Optical Flow. In Proceedings of the 16th International Conference on Pattern Recognition, Quebec City, QC, Canada, 11–15 August 2002; pp. 251–255. [Google Scholar]
- Quang, T.N.; Lee, S.; Song, B.C. Object Detection Using Improved Bi-Directional Feature Pyramid Network. Electronics 2021, 10, 746. [Google Scholar] [CrossRef]
- Ibarra, E.; Medina, R.; Morocho, V.; Vanegas, P. Optical flow as a tool for cardiac motion estimation. In Proceedings of the 2015 Asia-Pacific Conference on Computer Aided System Engineering, Quito, Ecuador, 14–16 July 2015; pp. 173–178. [Google Scholar]
- Chang, J.Y.; Tejero-de-Pablos, A.; Harada, T. Improved optical fow forgesture-based human-robot interaction. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 7983–7989. [Google Scholar]
- Huang, Z.; Pan, A. Non-local weighted regularization for optical flow estimation. Optik 2020, 208, 164069. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ammar, A.; Fredj, H.B.; Souani, C. Accurate Realtime Motion Estimation Using Optical Flow on an Embedded System. Electronics 2021, 10, 2164. https://doi.org/10.3390/electronics10172164
Ammar A, Fredj HB, Souani C. Accurate Realtime Motion Estimation Using Optical Flow on an Embedded System. Electronics. 2021; 10(17):2164. https://doi.org/10.3390/electronics10172164
Chicago/Turabian StyleAmmar, Anis, Hana Ben Fredj, and Chokri Souani. 2021. "Accurate Realtime Motion Estimation Using Optical Flow on an Embedded System" Electronics 10, no. 17: 2164. https://doi.org/10.3390/electronics10172164
APA StyleAmmar, A., Fredj, H. B., & Souani, C. (2021). Accurate Realtime Motion Estimation Using Optical Flow on an Embedded System. Electronics, 10(17), 2164. https://doi.org/10.3390/electronics10172164