Robust Adaptive Filtering Algorithm for Self-Interference Cancellation with Impulsive Noise


Abstract
:1. Introduction
2. NSAF Algorithm and Impulsive Noise Model
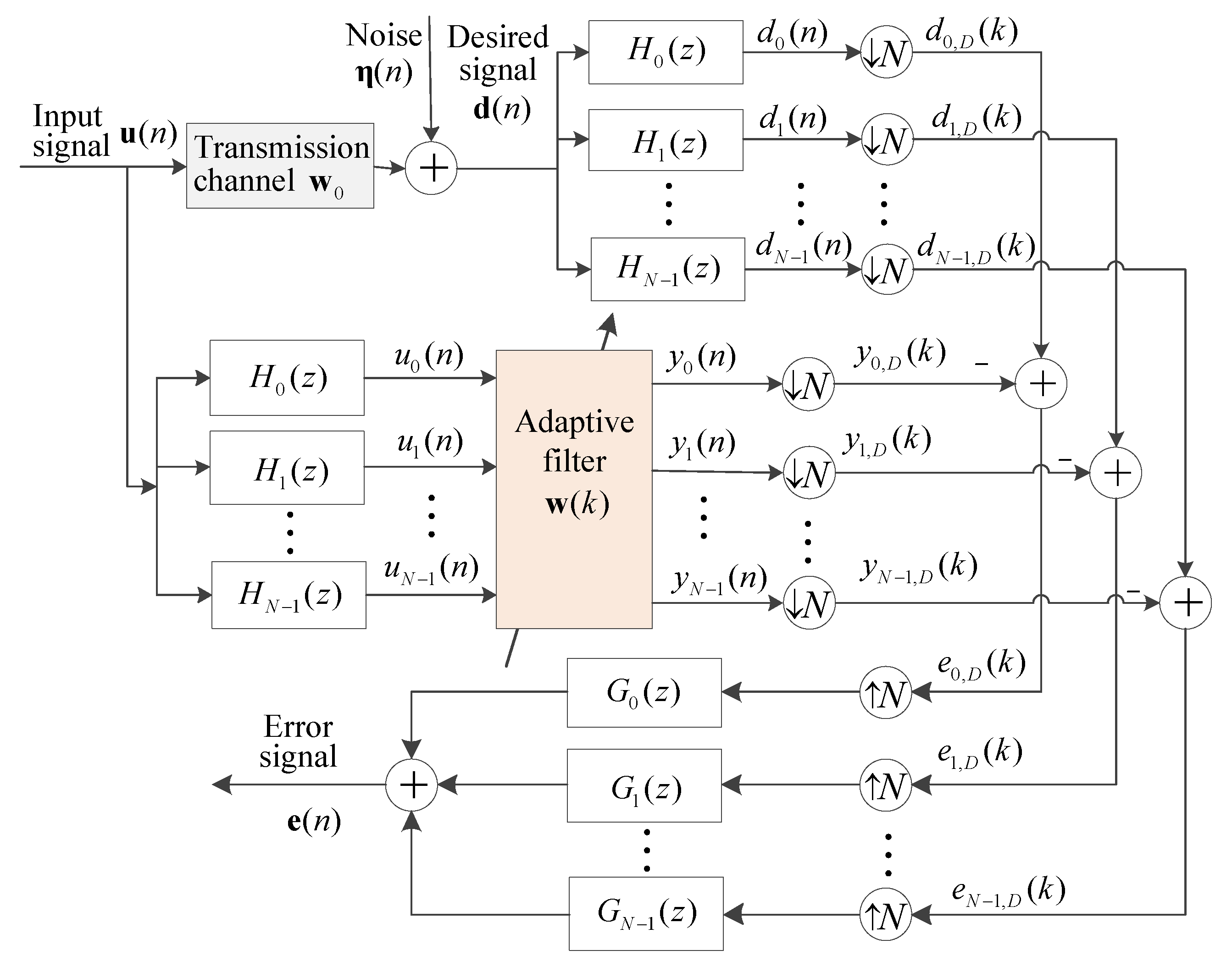
2.1. Review of the NSAF Algorithm
2.2. The -Stable Distribution Impulsive Noise
3. Proposed Algorithm
3.1. Arctangent Cost Function
3.2. Arc-IPNSAF Algorithm
3.3. Improved Arc-IPNSAF Algorithm
| Algorithm 1: Proposed the Sc-Arc-IPNSAF algorithm |
|
4. Algorithm Performance Analysis
4.1. Convergence Performance
4.2. Computational Complexity
5. Simulation
5.1. White Gaussian Noise
5.2. Impulsive Noise
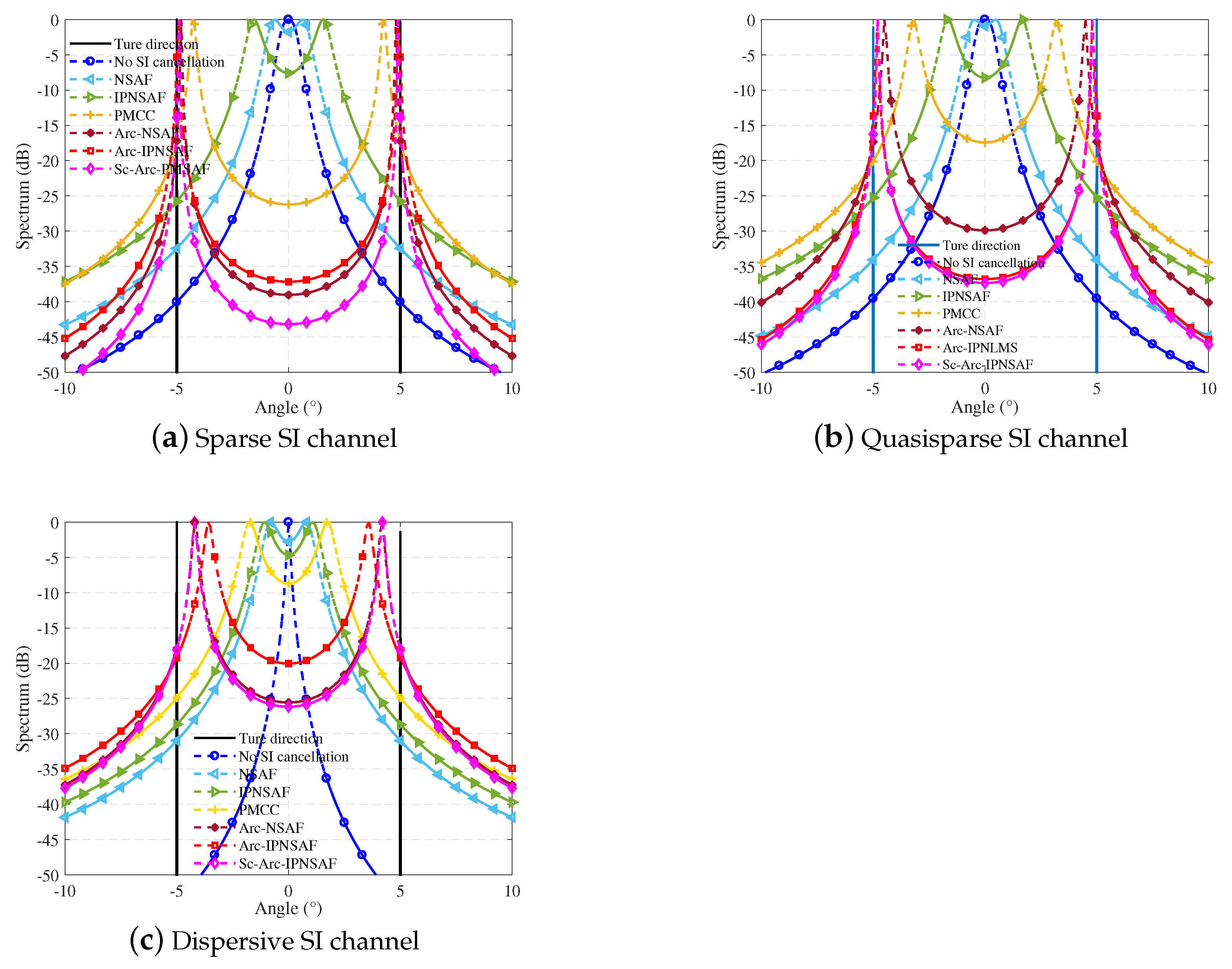
5.3. DOA Estimation Performance after SI Cancellation
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Lu, J.; Zhang, Q.; Shi, W.; Zhang, L. High accuracy phase-matching delay estimation method based on phase correction. Iet Electron. Lett. 2020, 56, 456–459. [Google Scholar] [CrossRef]
- Qiao, G.; Gan, S.; Liu, S.; Song, Q. Self-Interference channel estimation algorithm based on Maximum-Likelihood estimator in In-Band Full-Duplex Underwater Acoustic communication system. IEEE Access 2018, 6, 62324–62334. [Google Scholar] [CrossRef]
- Qiao, G.; Gan, S.; Liu, S.; Ma, L.; Sun, Z. Digital self-interference cancellation for asynchronous in-band full-duplex underwater acoustic communication. Sensors 2018, 18, 1700–1716. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, C.; Zhao, H.; Wu, F.; Tang, Y. Digital Self-Interference Cancellation with Variable Fractional Delay FIR Filter for Full-Duplex Radios. IEEE Commun. Lett. 2018, 22, 1082–1085. [Google Scholar] [CrossRef]
- Ahmed, E.; Eltawil, A.M. All-Digital Self-Interference Cancellation Technique for Full-Duplex Systems. IEEE Trans. Wirel. Commun. 2015, 14, 3519–3532. [Google Scholar] [CrossRef] [Green Version]
- Shen, L.; Henson, B.; Zakharov, Y.; Mitchell, P. Digital self-interference cancellation for full-duplex underwater acoustic systems. IEEE Trans. Circ. Syst. 2020, 67, 192–196. [Google Scholar] [CrossRef] [Green Version]
- Shen, L.; Henson, B.; Zakharov, Y.; Mitchell, P. Two-Stage Self-Interference Cancellation for Full-Duplex Underwater Acoustic Systems. In Proceedings of the OCEANS 2019-Marseille, Marseille, France, 17–20 June 2019; pp. 1–6. [Google Scholar]
- Zha, D.; Qiu, T. Underwater sources location in non-Gaussian impulsive noise environments. Digit. Signal Process. 2006, 16, 149–163. [Google Scholar] [CrossRef]
- Mula, S.; Gogineni, V.C.; Dhar, A.S. Robust Proportionate Adaptive Filter Architectures Under Impulsive Noise. IEEE Trans. Very Large Scale Integr. (Vlsi) Syst. 2019, 27, 1223–1227. [Google Scholar] [CrossRef]
- Liu, W.; Pokharel, P.P.; Principe, J.C. Correntropy: Properties and Applications in Non-Gaussian Signal Processing. IEEE Trans. Signal Process. 2007, 55, 5286–5298. [Google Scholar] [CrossRef]
- He, R.; Hu, B.G.; Zheng, W.S.; Kong, X.W. Robust Principal Component Analysis Based on Maximum Correntropy Criterion. IEEE Trans. Image Process. 2011, 20, 1485–1494. [Google Scholar]
- Xiong, K.; Wang, S.; Chen, B. Robust normalized least mean absolute third algorithms. IEEE Access 2019, 7, 10318–10330. [Google Scholar] [CrossRef]
- Fu, Z.; Lin, Y. Robust Proportionate Adaptive Filtering Algorithms Against Impulsive Interference. In Proceedings of the International Conference on Computer, Mechatronics and Electronic Engineering 2017, Xiamen, China, 24–25 December 2017; pp. 258–264. [Google Scholar]
- Kuo, S.M.; Gan, W.S.; Lee, K.A. Subband Adaptive Filtering: Theory and Implementation; Wiley: Hoboken, NJ, USA, 2009. [Google Scholar]
- Lee, K.A.; Gan, W.S. Improving Convergence of the NLMS Algorithm Using Constrained Subband Updates. IEEE Signal Process. Lett. 2004, 11, 736–739. [Google Scholar] [CrossRef]
- Yu, Y.; Zhao, H.; He, Z.; Chen, B. A robust band-dependent variable step size NSAF algorithm against impulsive noises. Signal Process. 2016, 119, 203–208. [Google Scholar] [CrossRef]
- Diniz, P.S.R. Adaptive Filtering: Algorithms and Practical Implementation; Springer: Boston, MA, USA, 2002. [Google Scholar]
- Sayed, A.H. Fundamentals of Adaptive Filtering; Wiley: Hoboken, NJ, USA, 2003. [Google Scholar]
- Kadkhodazadeh, A.S. A family of proportionate normalized sub-band adaptive filter algorithms. J. Frankl. Inst. 2011, 348, 212–238. [Google Scholar]
- Li, Y.; Wang, Y.; Albu, F.; Jiang, J. A general zero attraction proportionate normalized maximum correntropy criterion algorithm for sparse system identification. Symmetry 2017, 9, 229. [Google Scholar] [CrossRef] [Green Version]
- Pelekanakis, K.; Chitre, M. Adaptive Sparse Channel Estimation under Symmetric alpha-Stable Noise. IEEE Trans. Wirel. Commun. 2014, 13, 3183–3195. [Google Scholar] [CrossRef]
- Pelekanakis, K.; Liu, H.; Chitre, M. An Algorithm for Sparse Underwater Acoustic Channel Identification under Symmetric alpha-Stable Noise. In Proceedings of the OCEANS 2011 IEEE-Spain, Santander, Spain, 6–9 June 2011. [Google Scholar]
- Ma, W.; Zheng, D.; Zhang, Z.; Duan, J.; Chen, B. Robust proportionate adaptive filter based on maximum correntropy criterion for sparse system identification in impulsive noise environments. Signal Image Video Process. 2018, 12, 117–124. [Google Scholar] [CrossRef]
- Gogineni, V.C.; Mula, S. Improved proportionate-type sparse adaptive filtering under maximum correntropy criterion in impulsive noise environments. Digit. Signal Process. 2018, 79, 190–198. [Google Scholar] [CrossRef]
- Kochanska, I. Assessment of Wide-Sense Stationarity of an Underwater Acoustic Channel Based on a Pseudo-Random Binary Sequence Probe Signal. Appl. Sci. 2020, 10, 1221. [Google Scholar] [CrossRef] [Green Version]
- Peng, S.; Chen, B.; Sun, L. Constrained maximum correntropy adaptive filtering. Signal Process. 2017, 140, 116–126. [Google Scholar] [CrossRef] [Green Version]
- Zeng, J.; Lin, Y.; Shi, L. A Normalized Least Mean Square Algorithm Based on the Arctangent Cost Function Robust Against Impulsive Interference. Circ. Syst. Signal Process. 2016, 35, 3040–3047. [Google Scholar] [CrossRef]
- Yu, Y.; Zhao, H. Proportionate NSAF algorithms with sparseness-measured for acoustic echo cancellation. Aeu-Int. J. Electron. Commun. 2017, 75, 53–62. [Google Scholar] [CrossRef] [Green Version]
- Liu, L.; Fukumoto, M.; Zhang, S. A variable parameter improved proportionate normalized LMS algorithm. IEEE Asia Pac. Conf. Circ. Syst. 2008, 201–204. [Google Scholar]
- Hirano, G.; Shimamura, T. A modified IPNLMS algorithm using system sparseness. In Proceedings of the 2012 International Symposium on Intelligent Signal Processing and Communications Systems, Taipei, Taiwan, 4–7 November 2012; pp. 876–879. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Multiplication | Addition |
|---|---|---|
| MCC | 2M + 6 | 2M |
| Arc-NLMS | 4M + 8 | 4M − 1 |
| Arc-IPNLMS | 6M + 9 | 6M − 2 |
| NSAF | 3M + 3 + 1 | 3M + 3 − 3N |
| IPNSAF | 5M + 3 + 1 | 5M + 3 + 2 − 3N |
| Arc-NSAF | 4M + 3 + 6N + 1 | 4M + 3 − 3N |
| Arc-IPNSAF | 6M + 3 + 6N + 1 | 6M + 3 + 2 − 3N |
| Sc-Arc-IPNSAF | 7M + 3 + 10N + 1 | 8M + 3 + 2 |
| Algorithm | Memory |
|---|---|
| MCC | 2M + 5 |
| Arc-NLMS | 2M + 6 |
| Arc-IPNLMS | 3M + 8 |
| NSAF | M(N + 1) + N(3L + 4) + 2 |
| IPNSAF | M(2N + 1) + N(3L + 4) + 4 |
| Arc-NSAF | M(N + 1) + N(3L + 5) + 2 |
| Arc-IPNSAF | M(2N + 1) + N(3L + 5) + 4 |
| Sc-Arc-IPNSAF | M(2N + 1) + N(3L + 7) + 4 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, J.; Zhang, Q.; Shi, W.; Zhang, L.; Shi, J. Robust Adaptive Filtering Algorithm for Self-Interference Cancellation with Impulsive Noise. Electronics 2021, 10, 196. https://doi.org/10.3390/electronics10020196
Lu J, Zhang Q, Shi W, Zhang L, Shi J. Robust Adaptive Filtering Algorithm for Self-Interference Cancellation with Impulsive Noise. Electronics. 2021; 10(2):196. https://doi.org/10.3390/electronics10020196
Chicago/Turabian StyleLu, Jun, Qunfei Zhang, Wentao Shi, Lingling Zhang, and Juan Shi. 2021. "Robust Adaptive Filtering Algorithm for Self-Interference Cancellation with Impulsive Noise" Electronics 10, no. 2: 196. https://doi.org/10.3390/electronics10020196
APA StyleLu, J., Zhang, Q., Shi, W., Zhang, L., & Shi, J. (2021). Robust Adaptive Filtering Algorithm for Self-Interference Cancellation with Impulsive Noise. Electronics, 10(2), 196. https://doi.org/10.3390/electronics10020196