
DC Nanogrids for Integration of Demand Response and Electric Vehicle Charging Infrastructures: Appraisal, Optimal Scheduling and Analysis


 ,
,  ,
, 
Abstract
:1. Introduction
- Describing a DC layout for isolated NGs with DR programs and public EV charging stations.
- Developing an optimal day-ahead scheduling model for the grid system described, which is suitable for a grid operator which is integrated into the local service entity structure along with the local retailer.
- Developing a stochastic model for the different uncertainties involved in the NG operation, including renewable generation, local demand and EV charging profiles.
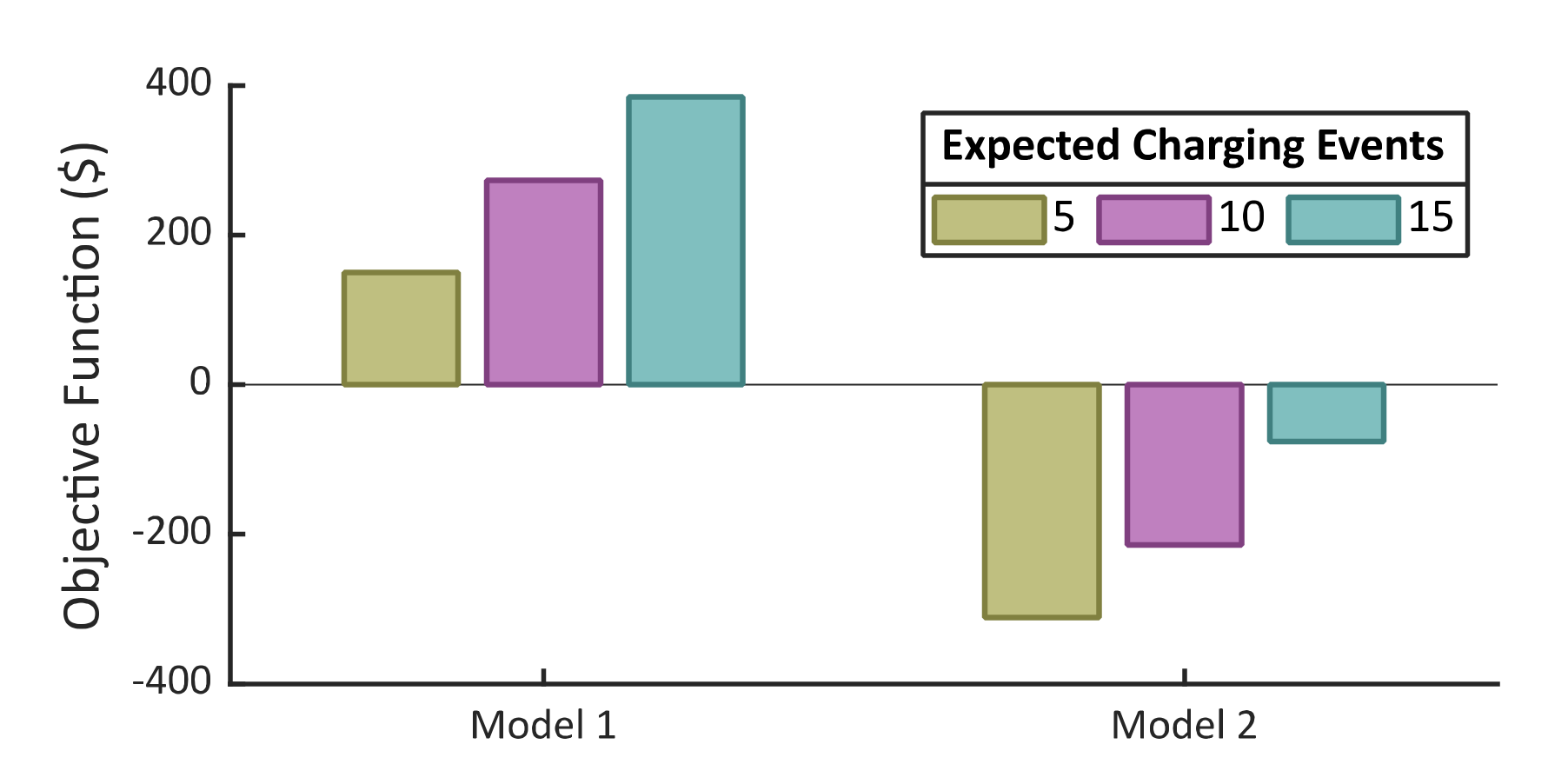
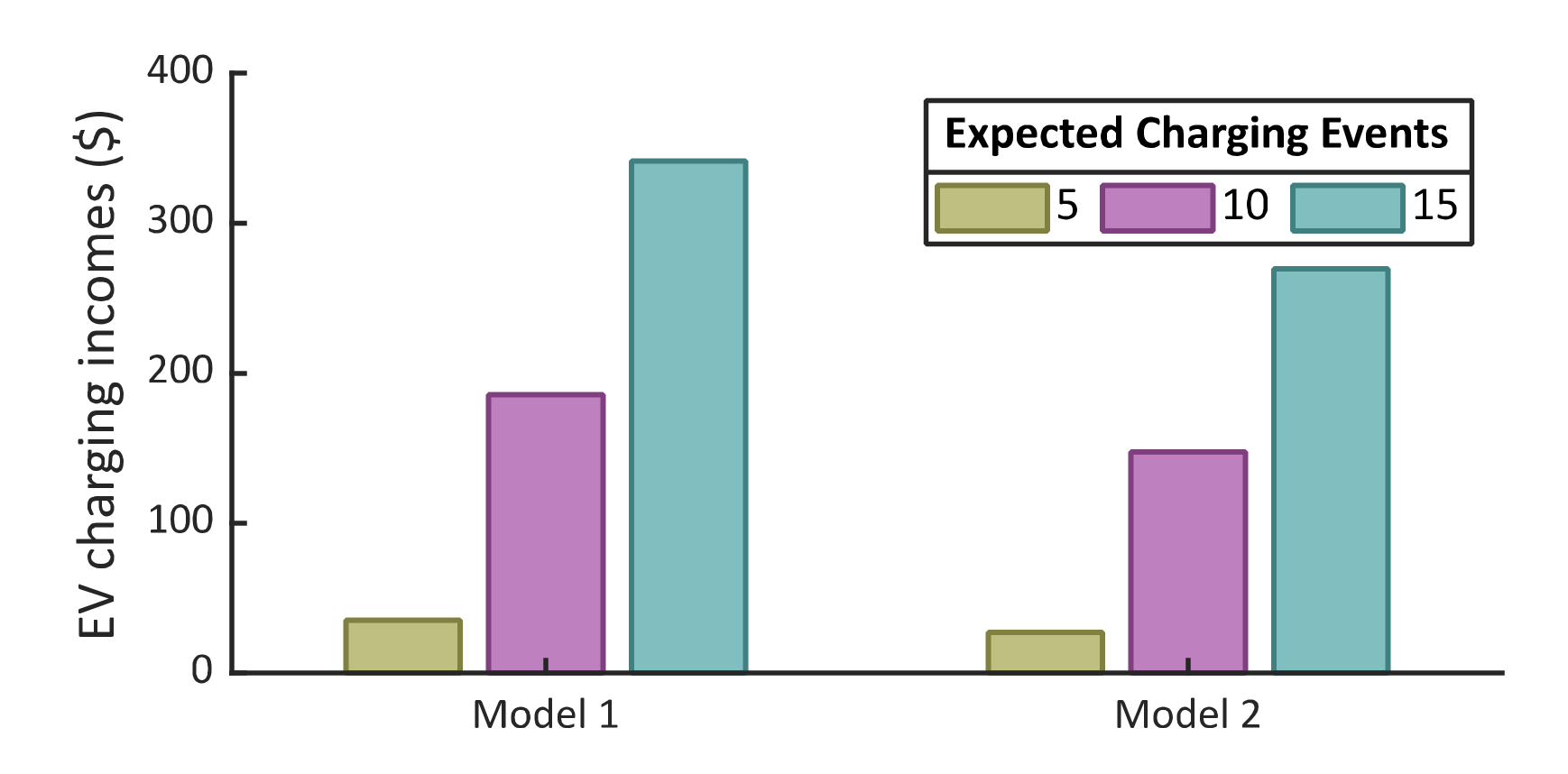
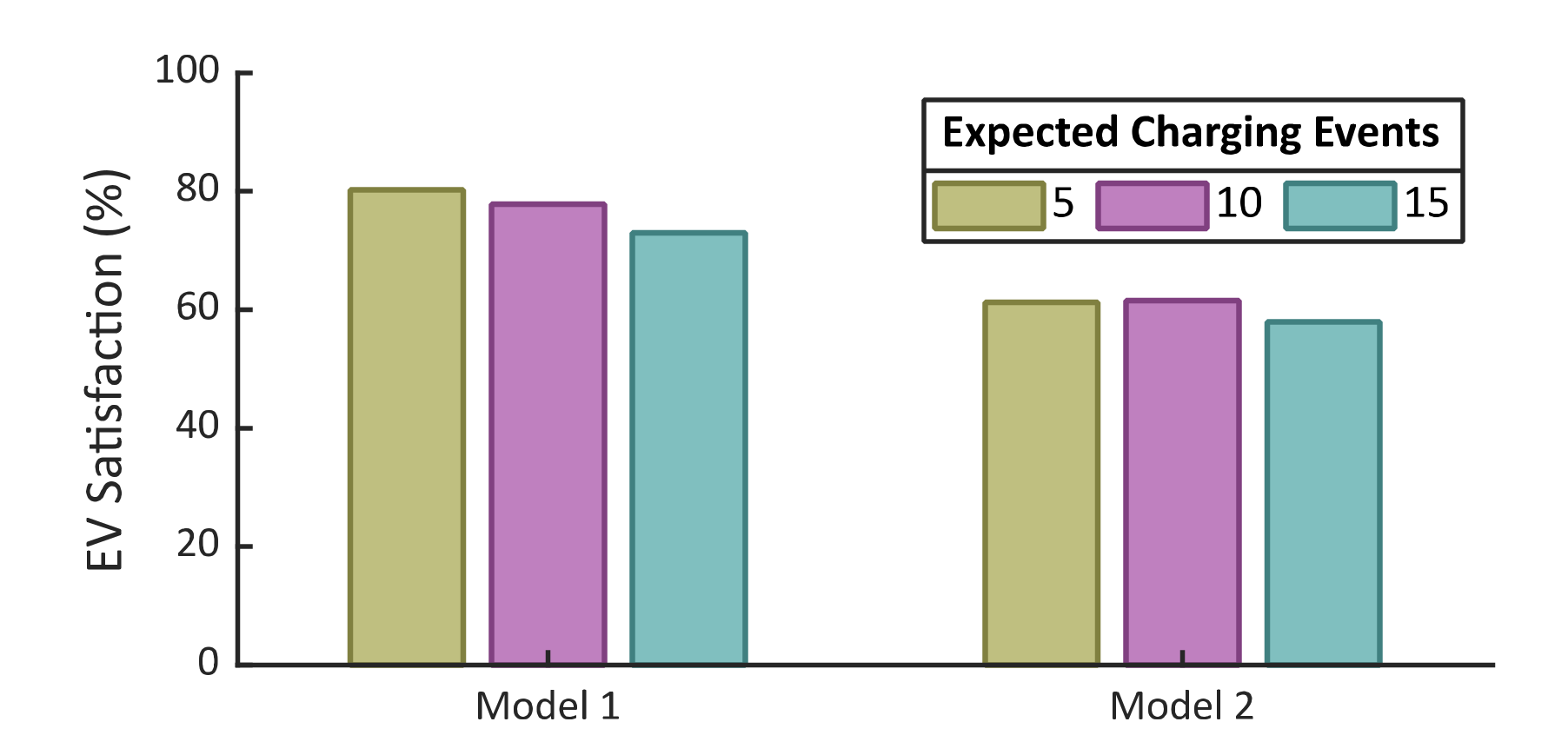
- Analyzing the influence of DR programs and EV penetration in the NG operation, also focusing on the economic impact of such aspects.
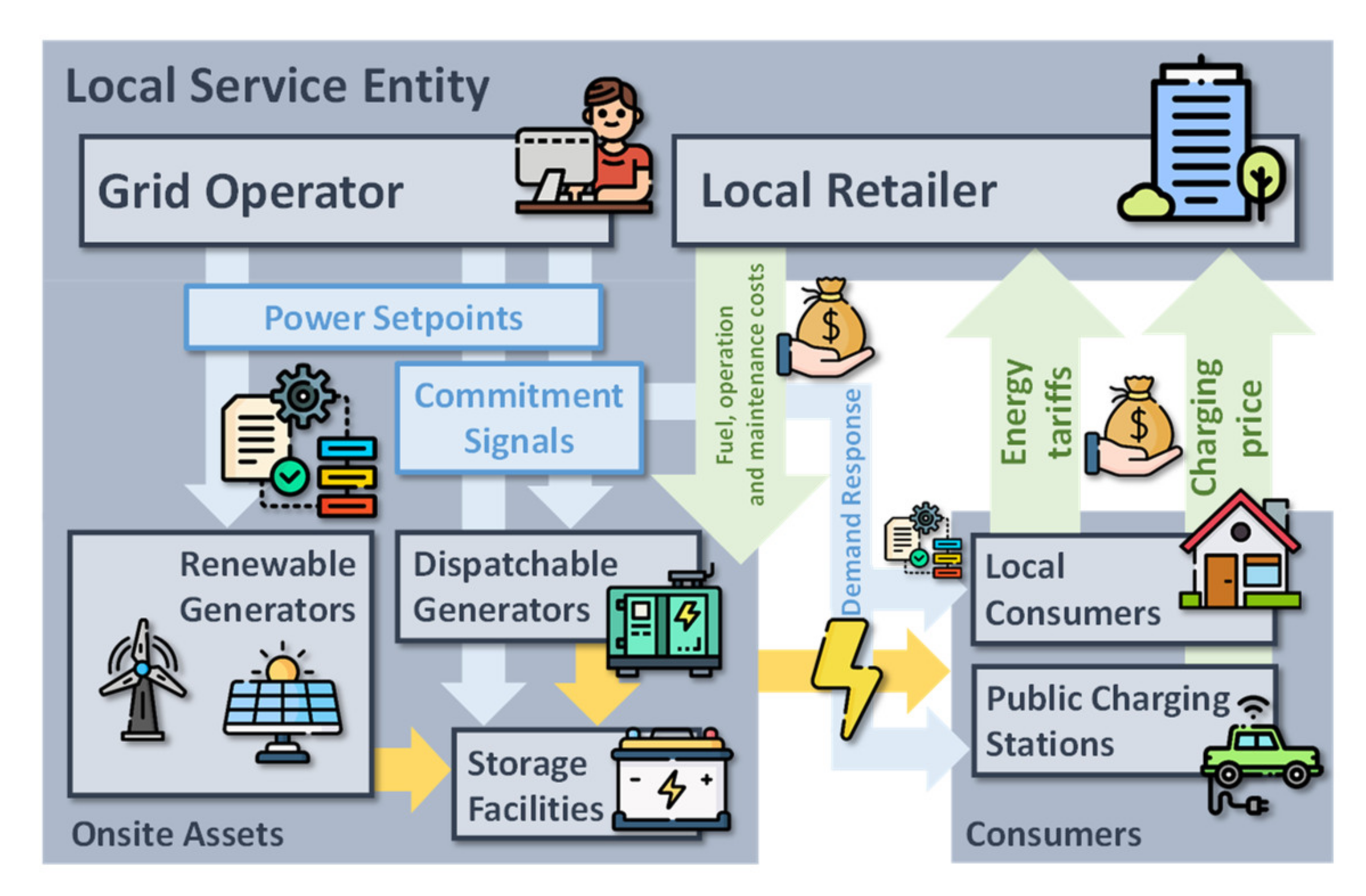
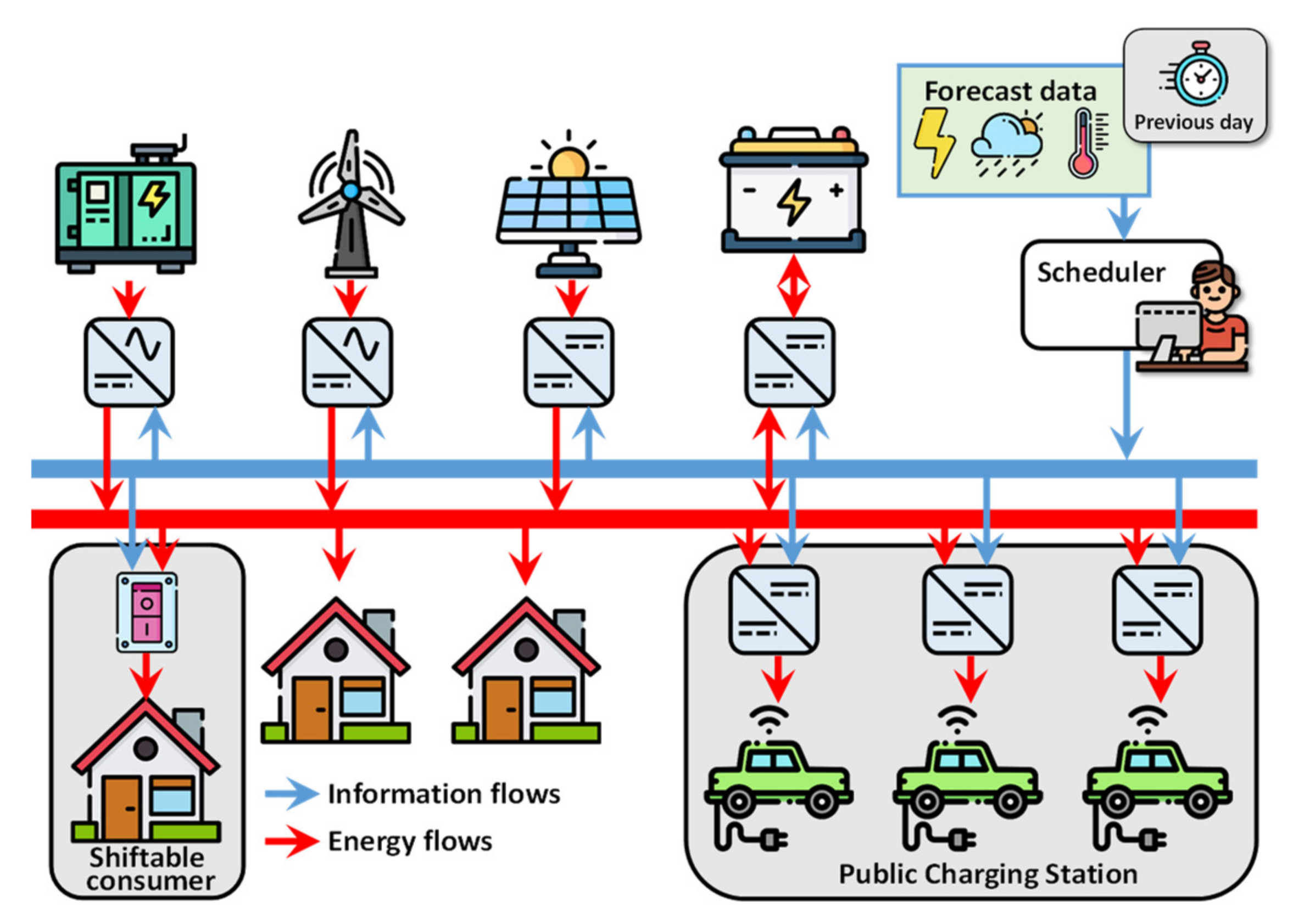
2. Description of the NG under Study
- NG operator: this agent is integrated into an upscale structure called a local service entity. It is responsible for operating the grid in an optimal way, ensuring the supplying quality and reliability. To this end, this agent daily performs a day-ahead optimal scheduling plan, by which the different on-site assets are coordinated with DR premises, such as those enabled by flexible consumers and public charging infrastructures. As a result, commitment signals, power set-points and DR information are sent to generators, storage systems and flexible consumers to address the resulted scheduling plan.
- Retailer: this agent provides fuel for conventional generators and is responsible for the monetary expenditures derived from generator operation (operation and maintenance). On the other hand, it receives monetary incomes from consumers through energy tariffs and public charging infrastructures, of which the local service entity is the owner.
- Generators and storage facilities: they are on-site assets owned by the local service entity. They may be formed by conventional generators, such as diesel engine generators (DEGs); renewable generators, such as PV panels or wind turbines (WTs); and storage facilities like BES.
- Consumers: residential demand and public charging infrastructures are considered as consumers in this paper. The residential demand comprises inelastic and flexible consumption. While the first one does not respond to price or incentive signals from the NG operator, the second one may be scheduled in order to increase the efficiency of the system or ensure its reliability. On the other hand, public charging stations are owned by the local service entity. They provide adequate charging infrastructures to privately owned EVs, obtaining a monetary counterpart which is received by the retailer.
3. Optimal Scheduling Model for the NG under Study
3.1. Assumptions
3.2. Objective Function
3.3. DEG Modelling
3.4. PV Modelling
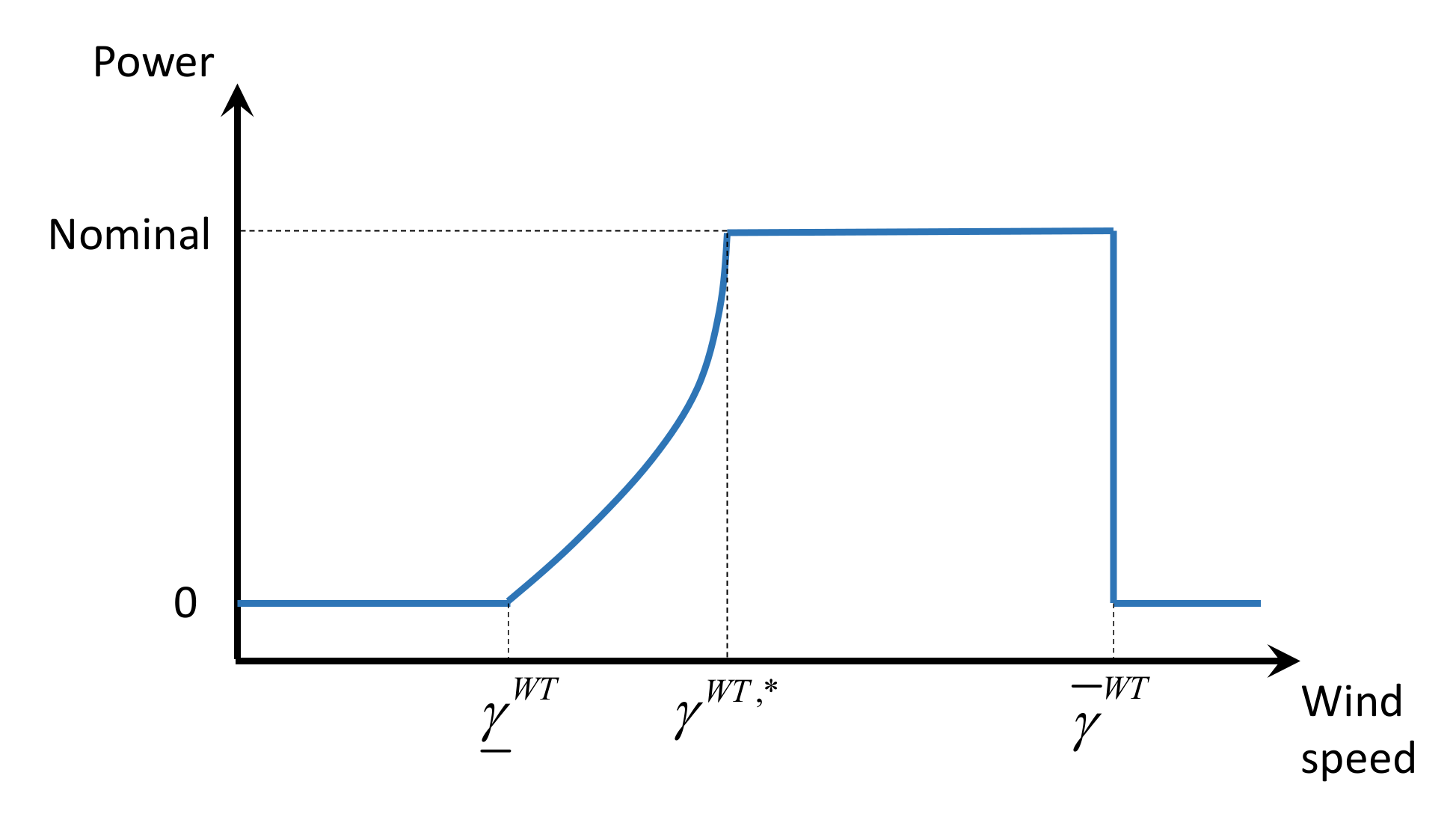
3.5. WT Modelling
3.6. BES Modelling
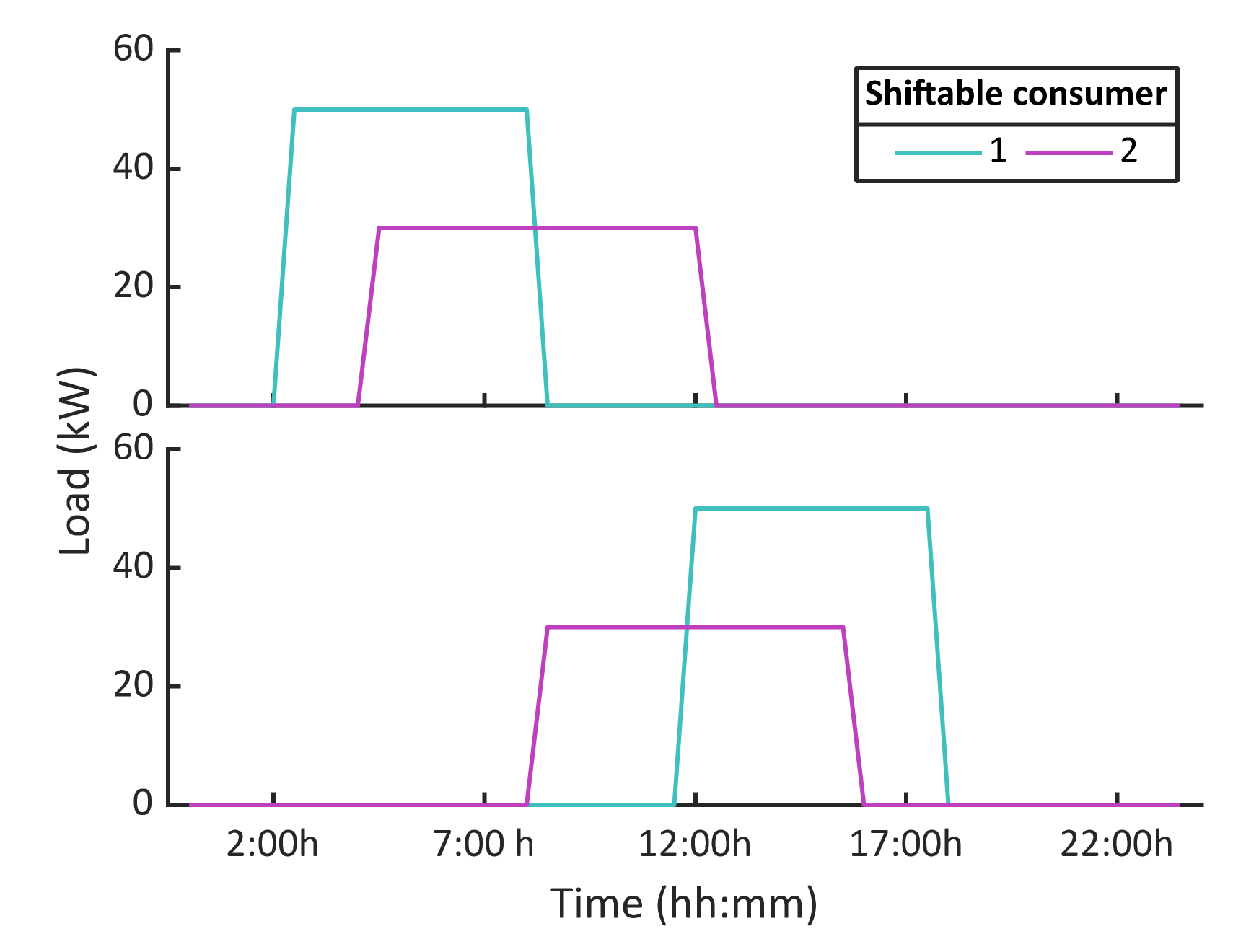
3.7. Shiftable Consumers Modeling
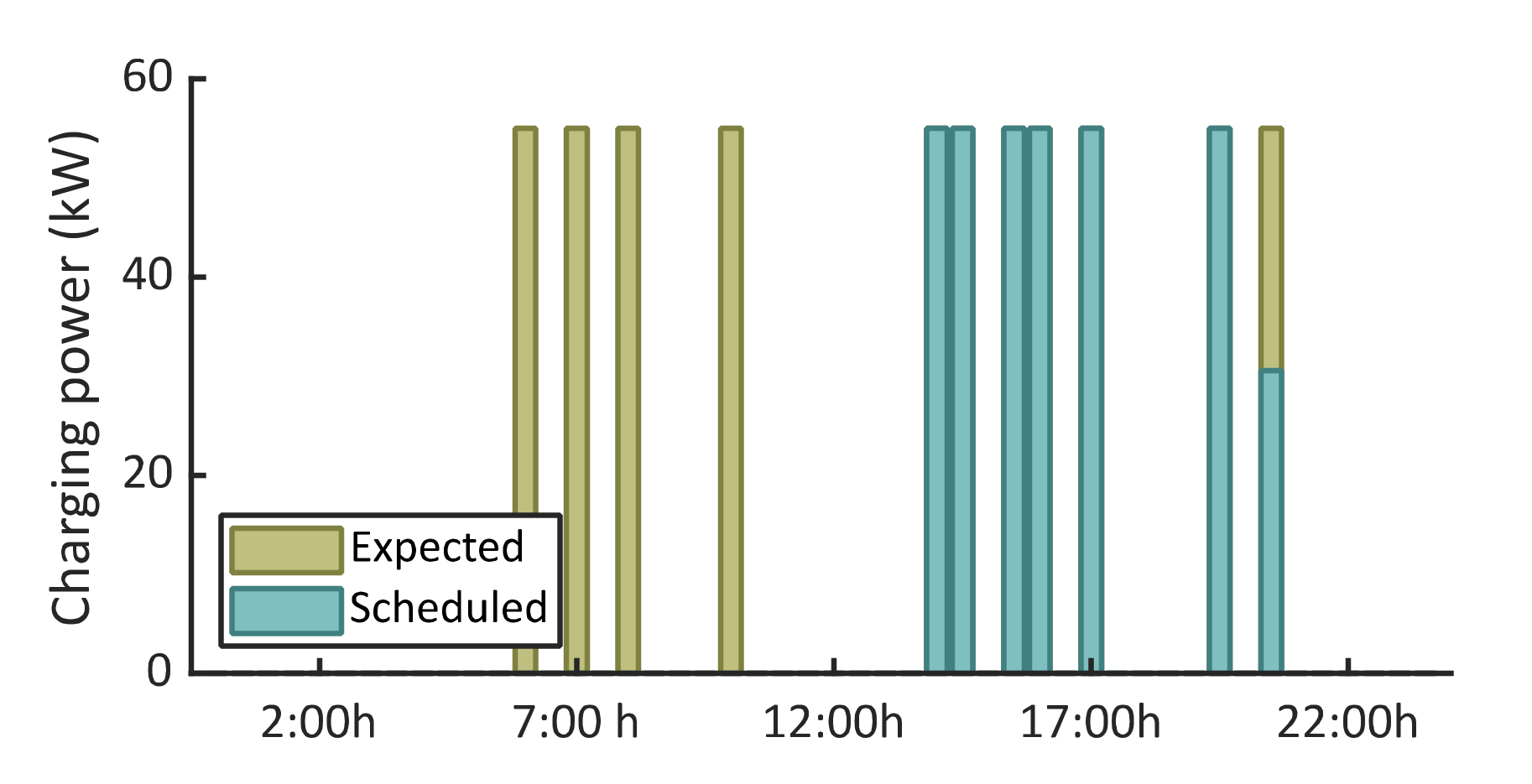
3.8. Public EV Charging Station Modeling
3.9. NG Balance
3.10. Optimization Problem
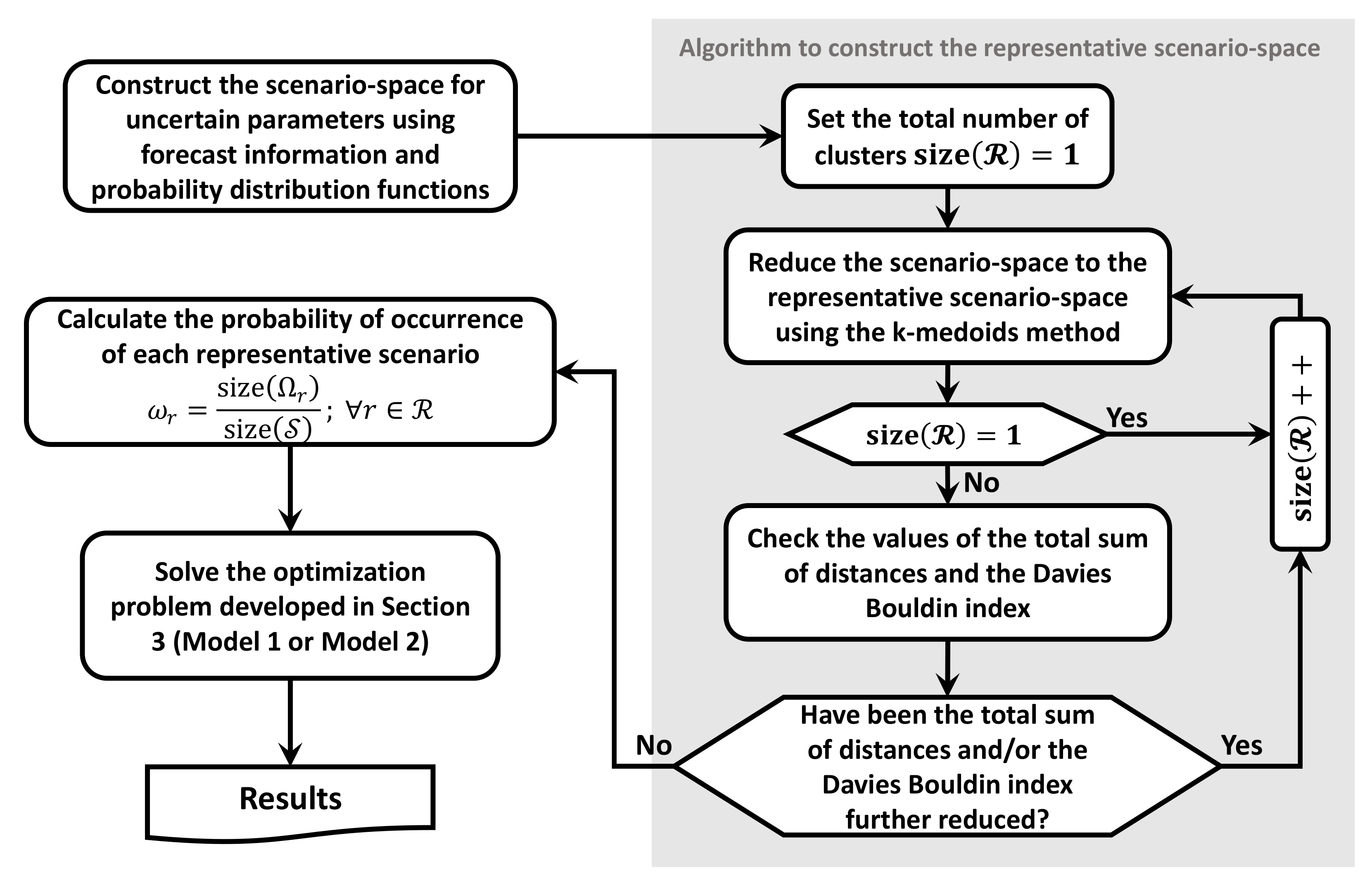
4. Uncertainties Modeling
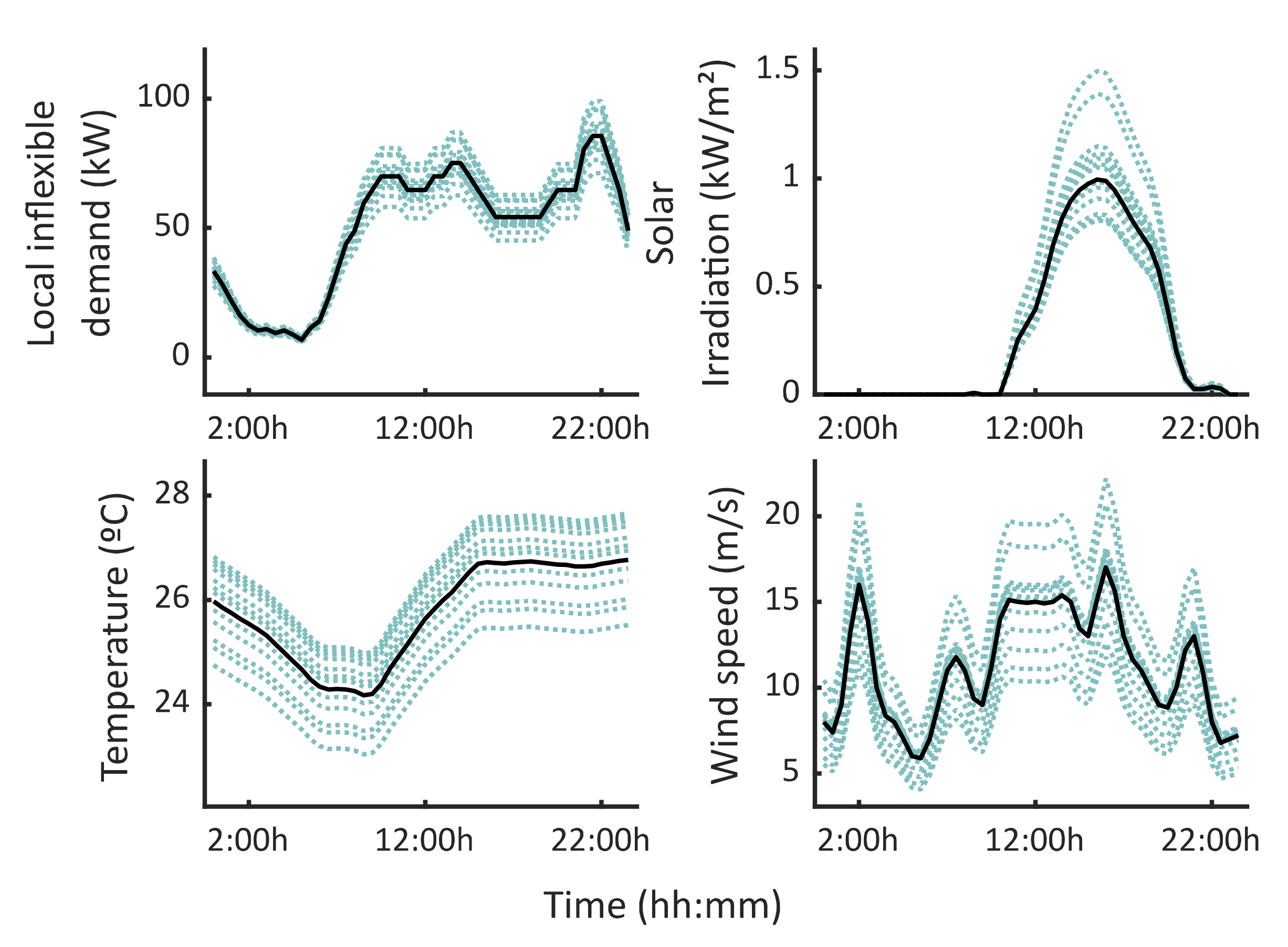
4.1. Predictable Parameters
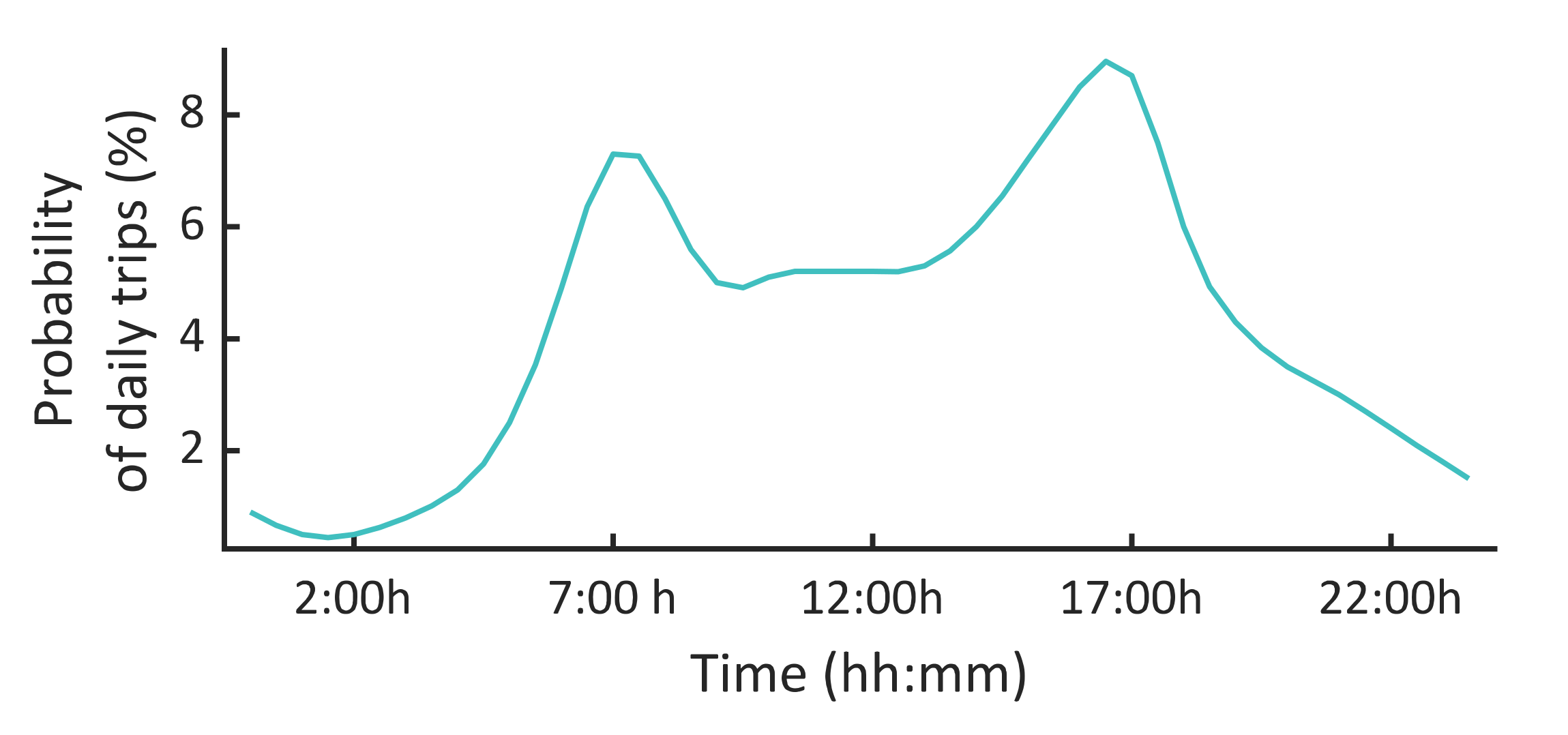
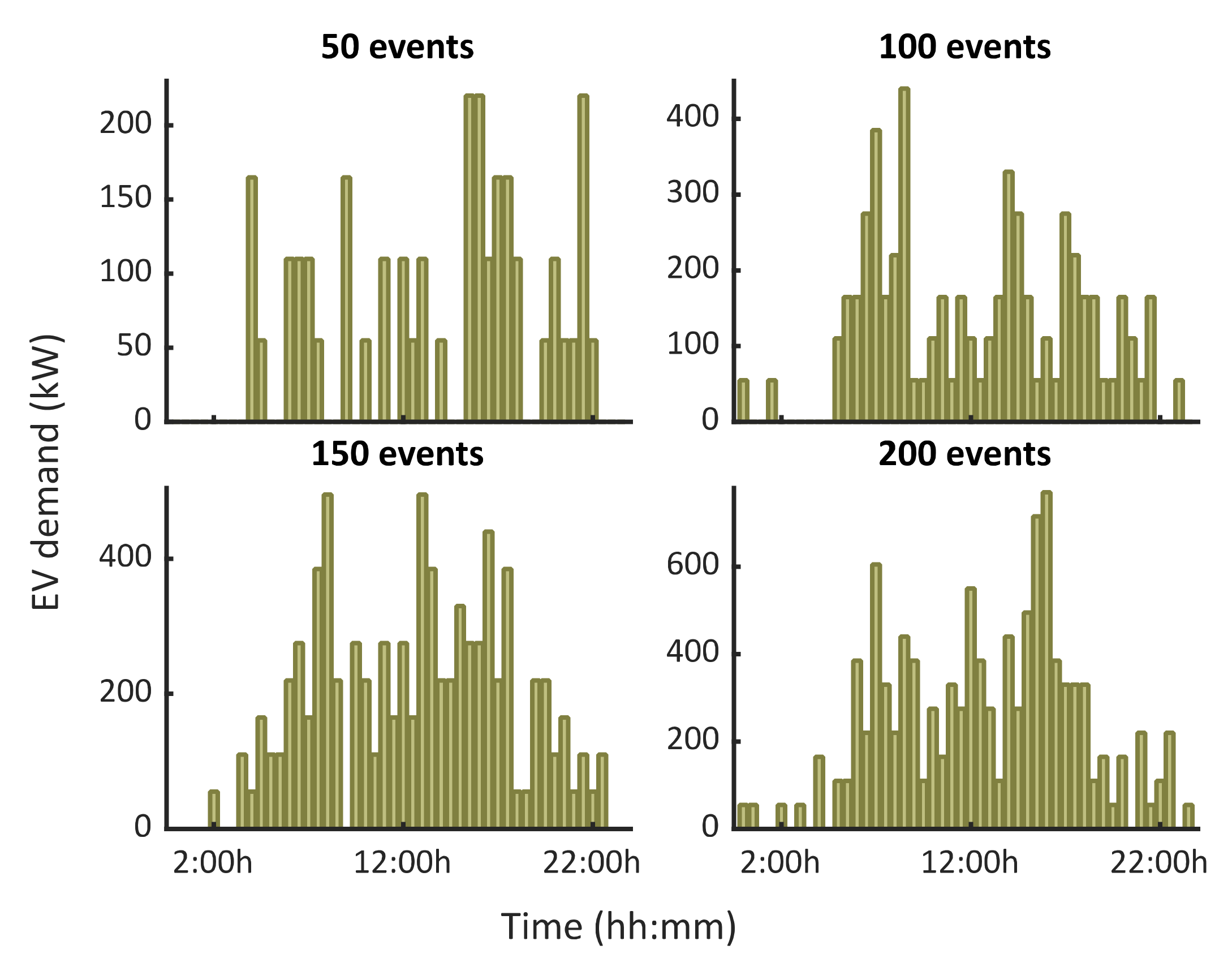
4.2. EV Demand Modeling
- The EV demand is considered constant during all the charging processes which, as indicated in [15], is a quite realistic assumption since only marginal variations with respect to the rating values are observed during the short time of the charging event.
- The EV charging process is completed within a unique time slot, which is quite realistic, assuming fast charging processes, which can be completed in only 15–30 min [15].
5. Case Study
5.1. Data
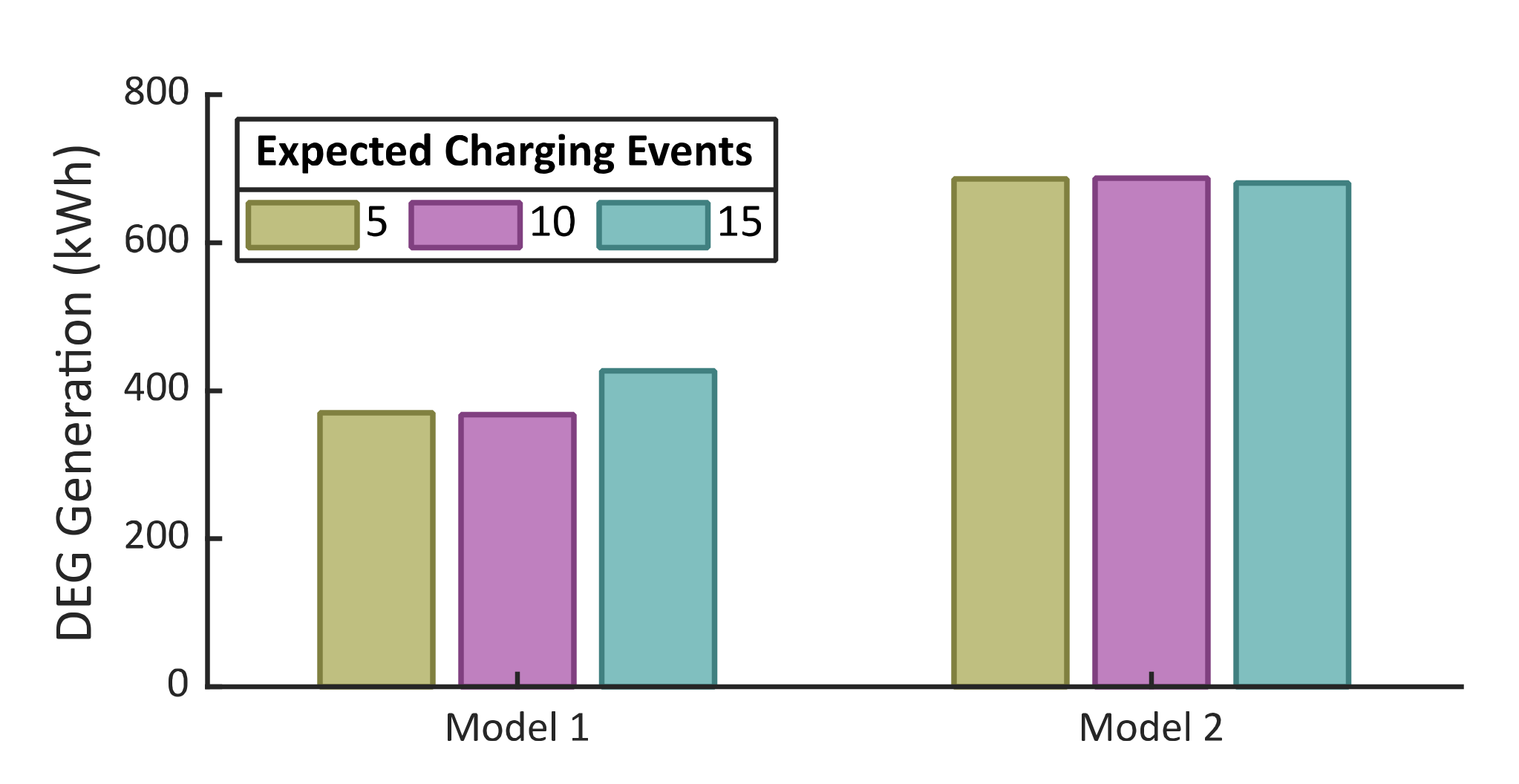
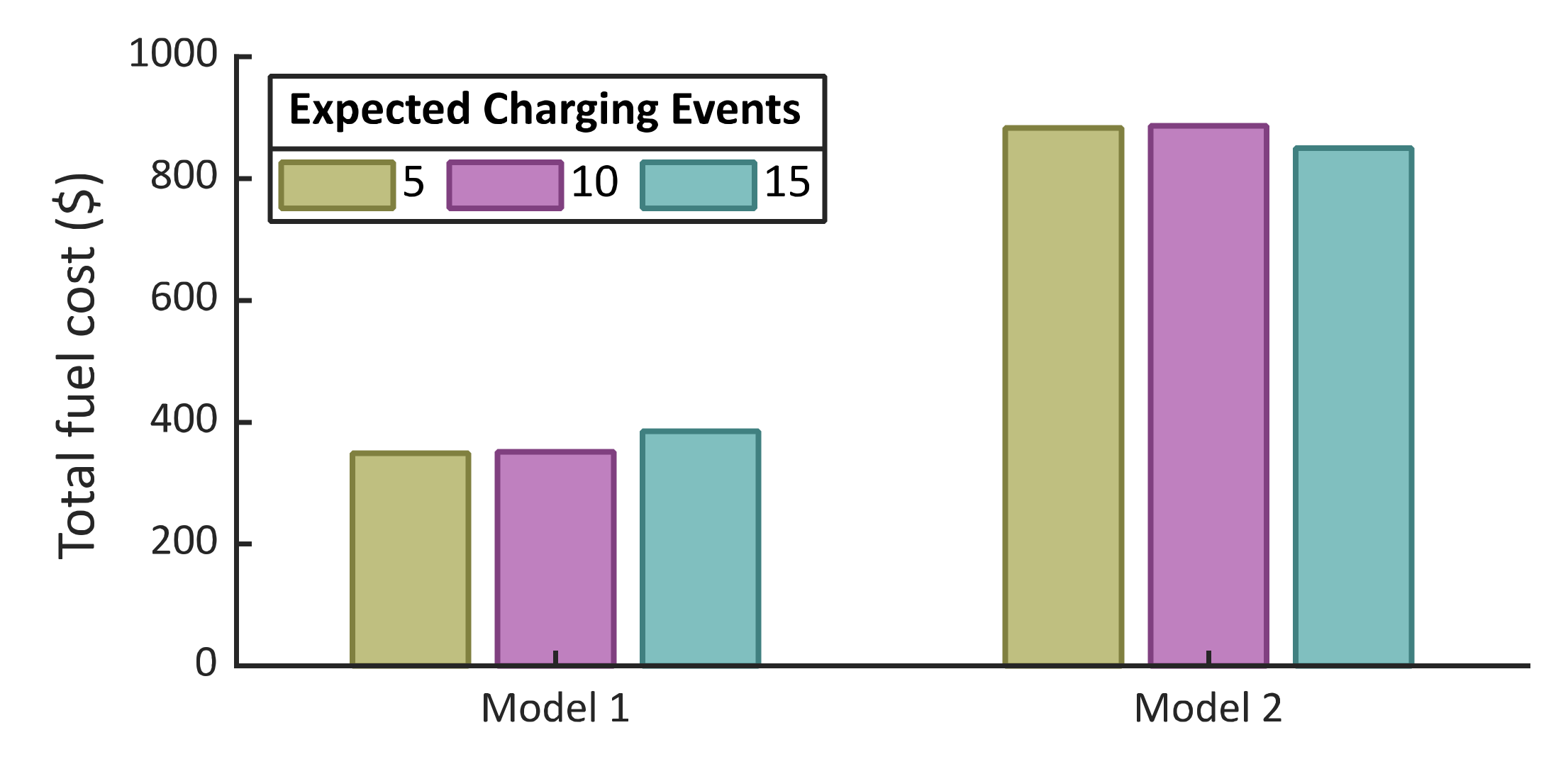
5.2. Results
6. Conclusions and Future Works
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| Indexes (Sets) | |
| Time | |
| Scenario | |
| Representative scenario | |
| Shiftable load | |
| Cluster of the representative scenario | |
| Time window of a shiftable load | |
| Superscripts | |
| Diesel engine generator | |
| Electric vehicle | |
| Photovoltaic | |
| Wind turbine | |
| Battery energy storage in charging/discharging mode | |
| Maximum minimum value of a variable or parameter | |
| Constants and parameters | |
| Time step (h) | |
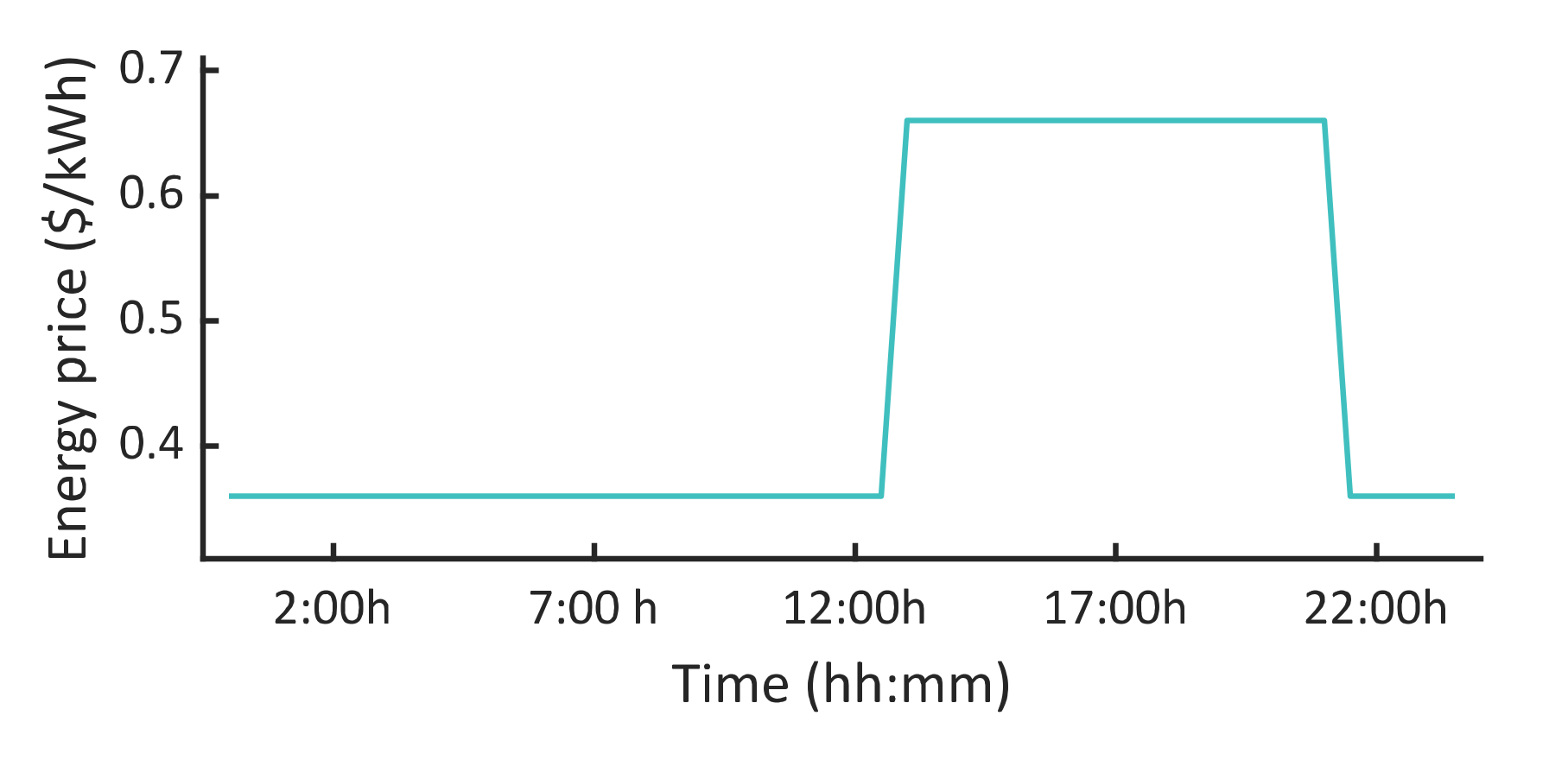
| Energy price ($/kWh) | |
| Predicted local demand (kW) | |
| Operation and maintenance cost ($/kWh or $/kWh²) | |
| Fuel cost coefficients ($/h, $/kWh, $/kWh²) | |
| Ramping rate (kW) | |
| Solar irradiance (kW/m²) | |
| Ambient temperature (ºC) | |
| Efficiency (pu) | |
| Wind speed (m/s) | |
| Speed-power wind turbine curve coefficients (kW·(m/s)−3, -) | |
| Total number of hours of operation of shiftable load (h) | |
| EV demand modeling | |
| Normal distribution (with mean and standard deviation ) for modeling the daily number of charging events | |
| Total number of charging events | |
| Arrival time of the vehicle corresponded to the scenario | |
| Binary vector whose element is equal to 1 if a vehicle arrives at the charging station at the time instant and 0 otherwise | |
| Function that returns a random number based on a probability distribution function | |
| Function that rounds to the nearest integer | |
| Vehicle trip distribution | |
| Rated power of Electric vehicles charging (kW) | |
| Decision variables | |
| Power (kW) | |
| Commitment status (binary) | |
| Energy stored (kWh) | |
| Flag variable that indicates the activation/deactivation of a shiftable load (binary) | |
Appendix A. Linearization of Quadratic Terms
References
- Mohammadi, F. Emerging Challenges in Smart Grid Cybersecurity Enhancement: A Review. Energies 2021, 14, 1380. [Google Scholar] [CrossRef]
- Khalid, H.; Shobole, A. Existing Developments in Adaptive Smart Grid Protection: A Review. Electr. Power Syst. Res. 2021, 191, 106901. [Google Scholar] [CrossRef]
- Shen, Y.; Fang, W.; Ye, F.; Kadoch, M. EV Charging Behavior Analysis Using Hybrid Intelligence for 5G Smart Grid. Electronics 2020, 9, 80. [Google Scholar] [CrossRef] [Green Version]
- Aluisio, B.; Dicorato, M.; Ferrini, I.; Forte, G.; Sbrizzai, R.; Trovato, M. Planning and reliability of DC microgrid configurations for Electric Vehicle Supply Infrastructure. Int. J. Electr. Power Energy Syst. 2021, 131, 107104. [Google Scholar] [CrossRef]
- Khan, M.U.; Wali, K.; Karimov, K.S.; Saeed, M.A. A new proposed hierarchy for renewable energy generation to distribution grid integration. In Proceedings of the 2015 International Conference on Emerging Technologies (ICET), Peshawar, Pakistan, 19–20 December 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Saeed, M.A.; Ahmed, N.; Hussain, M.; Jafar, A. A comparative study of controllers for optimal speed control of hybrid electric vehicle. In Proceedings of the 2016 International Conference on Intelligent Systems Engineering (ICISE), Islamabad, Pakistan, 15–17 January 2016; pp. 1–4. [Google Scholar] [CrossRef]
- Arévalo, P.; Tostado-Véliz, M.; Jurado, F. A novel methodology for comprehensive planning of battery storage systems. J. Energy Storage 2021, 37, 102456. [Google Scholar] [CrossRef]
- Smadi, A.A.; Ajao, B.T.; Johnson, B.K.; Lei, H.; Chakhchoukh, Y.; Abu Al-Haija, Q. A Comprehensive Survey on Cyber-Physical Smart Grid Testbed Architectures: Requirements and Challenges. Electronics 2021, 10, 1043. [Google Scholar] [CrossRef]
- Lázaro, J.; Astarloa, A.; Rodríguez, M.; Bidarte, U.; Jiménez, J. A Survey on Vulnerabilities and Countermeasures in the Communications of the Smart Grid. Electronics 2021, 10, 1881. [Google Scholar] [CrossRef]
- Romano, G.; Mantini, G.; Di Carlo, A.; D’Amico, A.; Falconi, C.; Wang, Z.L. Piezoelectric potential in vertically aligned nanowires for high output nanogenerators. Nanotechnology 2011, 22, 465401. [Google Scholar] [CrossRef]
- Nasir, T.; Bukhari, S.H.H.; Raza, S.; Munir, H.M.; Abrar, M.; ul Muqeet, H.A.; Bhatti, K.L.; Ro, J.-S.; Masroor, R. Recent Challenges and Methodologies in Smart Grid Demand Side Management: State-of-the-Art Literature Review. Math. Probl. Eng. 2021, 2021, 5821301. [Google Scholar] [CrossRef]
- Iqbal, S.; Sarfraz, M.; Ayyub, M.; Tariq, M.; Chakrabortty, R.K.; Ryan, M.J.; Alamri, B. A Comprehensive Review on Residential Demand Side Management Strategies in Smart Grid Environment. Sustainability 2021, 13, 7170. [Google Scholar] [CrossRef]
- Paterakis, N.G.; Erdinç, O.; Bakirtzis, A.G.; Catalão, J.P.S. Optimal Household Appliances Scheduling Under Day-Ahead Pricing and Load-Shaping Demand Response Strategies. IEEE Trans. Ind. Inform. 2015, 11, 1509–1519. [Google Scholar] [CrossRef]
- Tostado-Véliz, M.; Mouassa, S.; Jurado, F. A MILP framework for electricity tariff-choosing decision process in smart homes considering ‘Happy Hours’ tariffs. Int. J. Electr. Power Energy Syst. 2021, 131, 107139. [Google Scholar] [CrossRef]
- Tostado-Véliz, M.; Arévalo, P.; Jurado, F. A Comprehensive Electrical-Gas-Hydrogen Microgrid Model for Energy Management Applications. Energy Convers. Manag. 2021, 228, 113726. [Google Scholar] [CrossRef]
- Negarestani, S.; Fotuhi-Firuzabad, M.; Rastegar, M.; Rajabi-Ghahnavieh, A. Optimal Sizing of Storage System in a Fast Charging Station for Plug-in Hybrid Electric Vehicles. IEEE Trans. Transport. Electrif. 2016, 2, 443–453. [Google Scholar] [CrossRef]
- Zhang, M.; Chen, J. The Energy Management and Optimized Operation of Electric Vehicles Based on Microgrid. IEEE Trans. Power Deliv. 2014, 29, 1427–1435. [Google Scholar] [CrossRef]
- Honarmand, M.; Zakariazadeh, A.; Jadid, S. Integrated scheduling of renewable generation and electric vehicles parking lot in a smart microgrid. Energy Conver. Manag. 2014, 86, 745–755. [Google Scholar] [CrossRef]
- Ji, Z.; Huang, X.; Xu, C.; Sun, H. Accelerated Model Predictive Control for Electric Vehicle Integrated Microgrid Energy Management: A Hybrid Robust and Stochastic Approach. Energies 2016, 9, 973. [Google Scholar] [CrossRef]
- Mortaz, E.; Valenzuela, J. Microgrid energy scheduling using storage from electric vehicles. Electr. Power Syst. Res. 2017, 143, 554–562. [Google Scholar] [CrossRef]
- Panwar, L.K.; Konda, S.R.; Verma, A.; Panigrahi, B.K.; Kumar, R. Operation window constrained strategic energy management of microgrid with electric vehicle and distributed resources. IET Gener. Transm. Distrib. 2017, 11, 615–626. [Google Scholar] [CrossRef]
- Singh, S.; Jagota, S.; Singh, M. Energy management and voltage stabilization in an islanded microgrid through an electric vehicle charging station. Sustain. Cities Soc. 2018, 41, 679–694. [Google Scholar] [CrossRef]
- Li, Y.; Yang, Z.; Li, G.; Mu, Y.; Zhao, D.; Chen, C.; Shen, B. Optimal scheduling of isolated microgrid with an electric vehicle battery swapping station in multi-stakeholder scenarios: A bi-level programming approach via real-time pricing. Appl. Energy 2018, 232, 54–68. [Google Scholar] [CrossRef] [Green Version]
- Casini, M.; Zanvettor, G.G.; Kovjanic, M.; Vicino, A. Optimal Energy Management and Control of an Industrial Microgrid With Plug-in Electric Vehicles. IEEE Access 2019, 7, 101729–101740. [Google Scholar] [CrossRef]
- Savio, D.A.; Juliet, V.A.; Chokkalingam, B.; Padmanaban, S.; Holm-Nielsen, J.B.; Blaabjerg, F. Photovoltaic Integrated Hybrid Microgrid Structured Electric Vehicle Charging Station and Its Energy Management Approach. Energies 2019, 12, 168. [Google Scholar] [CrossRef] [Green Version]
- Sedighizadeh, M.; Shaghaghi-Shahr, G.; Esmaili, M.; Aghamohammadi, M.R. Optimal distribution feeder reconfiguration and generation scheduling for microgrid day-ahead operation in the presence of electric vehicles considering uncertainties. J. Energy Storage 2019, 21, 58–71. [Google Scholar] [CrossRef]
- Lakshminarayanan, V.; Chemudupati, V.G.S.; Pramanick, S.K.; Rajashekara, K. Real-Time Optimal Energy Management Controller for Electric Vehicle Integration in Workplace Microgrid. IEEE Trans. Tansport. Electrifi. 2019, 5, 174–185. [Google Scholar] [CrossRef]
- Zou, Y.Y.; Dong, Y.; Li, S.Y.; Niu, Y.G. Multi-time hierarchical stochastic predictive control for energy management of an island microgridwith plug-in electric vehicles. IET Gener. Transmiss. Distrib. 2019, 13, 1794–1801. [Google Scholar] [CrossRef]
- Aljohani, T.M.; Ebrahim, A.F.; Mohammed, O. Hybrid Microgrid Energy Management and Control Based on Metaheuristic-Driven Vector-Decoupled Algorithm Considering Intermittent Renewable Sources and Electric Vehicles Charging Lot. Energies 2020, 13, 3423. [Google Scholar] [CrossRef]
- Liu, C.J.; Abdulkareem, S.S.; Rezvani, A.; Samad, S.; Aljojo, N.; Foong, L.K.; Nishihara, K. Stochastic scheduling of a renewable-based microgrid in the presence of electric vehicles using modified harmony search algorithm with control policies. Sustain. Cities Soc. 2020, 59, 102183. [Google Scholar] [CrossRef]
- Sedighizadeh, M.; Fazlhashemi, S.S.; Javadi, H.; Taghvaei, M. Multi-objective day-ahead energy management of a microgrid considering responsive loads and uncertainty of the electric vehicles. J. Clean. Prod. 2020, 267, 121562. [Google Scholar] [CrossRef]
- Sriyakul, T.; Jermsittiparsert, K. Economic scheduling of a smart microgrid utilizing the benefits of plug-in electric vehicles contracts with a comprehensive model of information-gap decision theory. J. Energy Storage 2020, 32, 102010. [Google Scholar] [CrossRef]
- Aldosary, A.; Rawa, M.; Ali, Z.M.; Latifi, M.; Razmjoo, A.; Rezvani, A. Energy management strategy based on short-term resource scheduling of a renewable energy-based microgrid in the presence of electric vehicles using θ-modified krill herd algorithm. Neural Comput. Appl. 2021, 33, 10005–10020. [Google Scholar] [CrossRef]
- Li, H.D.; Rezvani, A.; Hu, J.K.; Ohshima, K. Optimal day-ahead scheduling of microgrid with hybrid electric vehicles using MSFLA algorithm considering control strategies. Sustain. Cities Soc. 2021, 66, 102681. [Google Scholar] [CrossRef]
- AL-Dhaifallah, M.; Ali, Z.M.; Alanazi, M.; Dadfar, S.; Fazaeli, M.H. An efficient short-term energy management system for a microgrid with renewable power generation and electric vehicles. Neur. Comput. Appl. 2021. [Google Scholar] [CrossRef]
- Momen, H.; Abessi, A.; Jadid, S.; Shafie-khah, M.; Catalao, J.P.S. Load restoration and energy management of a microgrid with distributed energy resources and electric vehicles participation under a two-stage stochastic framework. Int. J. Electr. Power Energy Syst. 2021, 133, 107320. [Google Scholar] [CrossRef]
- Mongird, K.; Fotedar, V.; Viswanathan, V.; Koritarov, V.; Balducci, P.; Hadjerioua, B.; Alam, J. Energy Storage Technology and Cost Characterization Report; Pacific Northwest National Lab. (PNNL): Richland, WA, USA, 2019. Available online: https://energystorage.pnnl.gov/pdf/PNNL-28866.pdf (accessed on 15 September 2021).
- Garcia-Torres, F.; Vilaplana, D.G.; Bordons, C.; Roncero-Sánchez, P.; Ridao, M.A. Optimal Management of Microgrids With External Agents Including Battery/Fuel Cell Electric Vehicles. IEEE Trans. Smart Grid 2019, 10, 4299–4308. [Google Scholar] [CrossRef]
- Alvarado-Barrios, L.; del Nozal, A.R.; Valerino, J.B.; Vera, I.G.; Martínez-Ramos, J.L. Stochastic unit commitment in microgrids: Influence of the load forecasting error and the availability of energy storage. Renew. Energy 2020, 146, 2060–2069. [Google Scholar] [CrossRef]
- Tostado-Véliz, M.; León-Japa, R.S.; Jurado, F. Optimal electrification of off-grid smart homes considering flexible demand and vehicle-to-home capabilities. Appl. Energy 2021, 298, 117184. [Google Scholar] [CrossRef]
- Chaib, A.; Achour, D.; Kesraoui, M. Control of a Solar PV/wind Hybrid Energy System. Energy Proc. 2016, 95, 89–97. [Google Scholar] [CrossRef] [Green Version]
- Tostado-Véliz, M.; Bayat, M.; Ghadimi, A.A.; Jurado, F. Home energy management in off-grid dwellings: Exploiting flexibility of thermostatically controlled appliances. J. Clean. Prod. 2021, 310, 127507. [Google Scholar] [CrossRef]
- Alsaidan, I.; Khodaei, A.; Gao, W. A Comprehensive Battery Energy Storage Optimal Sizing Model for Microgrid Applications. IEEE Trans. Power Syst. 2018, 33, 3968–3980. [Google Scholar] [CrossRef]
- Shafie-Khah, M.; Siano, P. A Stochastic Home Energy Management System Considering Satisfaction Cost and Response Fatigue. IEEE Trans. Ind. Inform. 2018, 14, 629–638. [Google Scholar] [CrossRef]
- Shams, M.H.; Shahabi, M.; Khodayar, M.E. Risk-averse optimal operation of Multiple-Energy Carrier systems considering network constraints. Electr. Power Syst. Res. 2018, 164, 1–10. [Google Scholar] [CrossRef]
- Pinto, E.S.; Serra, L.M.; Lázaro, A. Evaluation of methods to select representative days for the optimization of polygeneration systems. Renew. Energy 2020, 151, 488–502. [Google Scholar] [CrossRef]
- Tostado-Véliz, M.; Icaza-Alvarez, D.; Jurado, F. A novel methodology for optimal sizing photovoltaic-battery systems in smart homes considering grid outages and demand response. Renew. Energy 2021, 170, 884–896. [Google Scholar] [CrossRef]
- MansourLakouraj, M.; Niaz, H.; Liu, J.J.; Siano, P.; Anvari-Moghaddam, A. Optimal risk-constrained stochastic scheduling of microgrids with hydrogen vehicles in real-time and day-ahead markets. J. Clean. Prod. 2021, 318, 128452. [Google Scholar] [CrossRef]
- Shrivastava, N.A.; Panigrahi, B.K. Prediction interval estimations for electricity demands and prices: A multi-objective approach. IET Gener. Transmiss. Distrib. 2015, 9, 494–502. [Google Scholar] [CrossRef]
- Yu, X.; Zhang, W.; Zang, H.; Yang, H. Wind Power Interval Forecasting Based on Confidence Interval Optimization. Energies 2018, 11, 3336. [Google Scholar] [CrossRef] [Green Version]
- Mukherjee, U.; Maroufmashat, A.; Narayan, A.; Elkamel, A.; Fowler, M. A Stochastic Programming Approach for the Planning and Operation of a Power to Gas Energy Hub with Multiple Energy Recovery Pathways. Energies 2017, 10, 868. [Google Scholar] [CrossRef] [Green Version]
- Salama, H.S.; Said, S.M.; Aly, M.; Vokony, I.; Hartmann, B. Studying Impacts of Electric Vehicle Functionalities in Wind Energy-Powered Utility Grids With Energy Storage Device. IEEE Access 2021, 9, 45754–45769. [Google Scholar] [CrossRef]
- Gurobi—The Fastest Solver. Available online: www.gurobi.com (accessed on 16 September 2021).
- National Center of Environmental Information. Land-Based Station Database. Available online: https://www.ncei.noaa.gov/products/land-based-station (accessed on 16 September 2021).
- Red Eléctrica de España. Demanda de Energía en Tiempo Real Isla de La Palma. Available online: https://www.ree.es/es/actividades/sistema-electrico-canario/demanda-de-energia-en-tiempo-real (accessed on 16 September 2021).
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Uncertain Parameter | Explanation |
|---|---|
| Local inflexible (non-shiftable) demand | |
| EV demand | |
| Solar irradiation | |
| Ambient temperature | |
| Wind speed |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| 100 kW | 50 kW | ||
| 5 kW | 0.88 | ||
| 50 kW | 0.19 $/kWh | ||
| 0.6 $/h | 2 m/s | ||
| 0.05 $/kWh | 11 m/s | ||
| 0.02 $/kWh² | 50 kWh | ||
| 125 kW | 25 kW | ||
| 0.167 | 0.95 | ||
| 0.4 $/kWh | 10−6 $/kWh² | ||
| 0.7 |
| Parameter | Consumer 1 | Consumer 2 |
|---|---|---|
| 50 kW | 30 kW | |
| 0.36 $/kWh | 0.27 $/kWh | |
| 6 h | 7.5 h | |
| 2:30–17:30 h | 4:30–15:30 h |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Habeeb, S.A.; Tostado-Véliz, M.; Hasanien, H.M.; Turky, R.A.; Meteab, W.K.; Jurado, F. DC Nanogrids for Integration of Demand Response and Electric Vehicle Charging Infrastructures: Appraisal, Optimal Scheduling and Analysis. Electronics 2021, 10, 2484. https://doi.org/10.3390/electronics10202484
Habeeb SA, Tostado-Véliz M, Hasanien HM, Turky RA, Meteab WK, Jurado F. DC Nanogrids for Integration of Demand Response and Electric Vehicle Charging Infrastructures: Appraisal, Optimal Scheduling and Analysis. Electronics. 2021; 10(20):2484. https://doi.org/10.3390/electronics10202484
Chicago/Turabian StyleHabeeb, Salwan Ali, Marcos Tostado-Véliz, Hany M. Hasanien, Rania A. Turky, Wisam Kaream Meteab, and Francisco Jurado. 2021. "DC Nanogrids for Integration of Demand Response and Electric Vehicle Charging Infrastructures: Appraisal, Optimal Scheduling and Analysis" Electronics 10, no. 20: 2484. https://doi.org/10.3390/electronics10202484
APA StyleHabeeb, S. A., Tostado-Véliz, M., Hasanien, H. M., Turky, R. A., Meteab, W. K., & Jurado, F. (2021). DC Nanogrids for Integration of Demand Response and Electric Vehicle Charging Infrastructures: Appraisal, Optimal Scheduling and Analysis. Electronics, 10(20), 2484. https://doi.org/10.3390/electronics10202484