
Possibility of Power Electronics-Based Control Analysis of a Self-Excited Induction Generator (SEIG) for Wind Turbine and Electrolyzer Application



Abstract
:1. Introduction
2. System Analysis
2.1. System Configuration
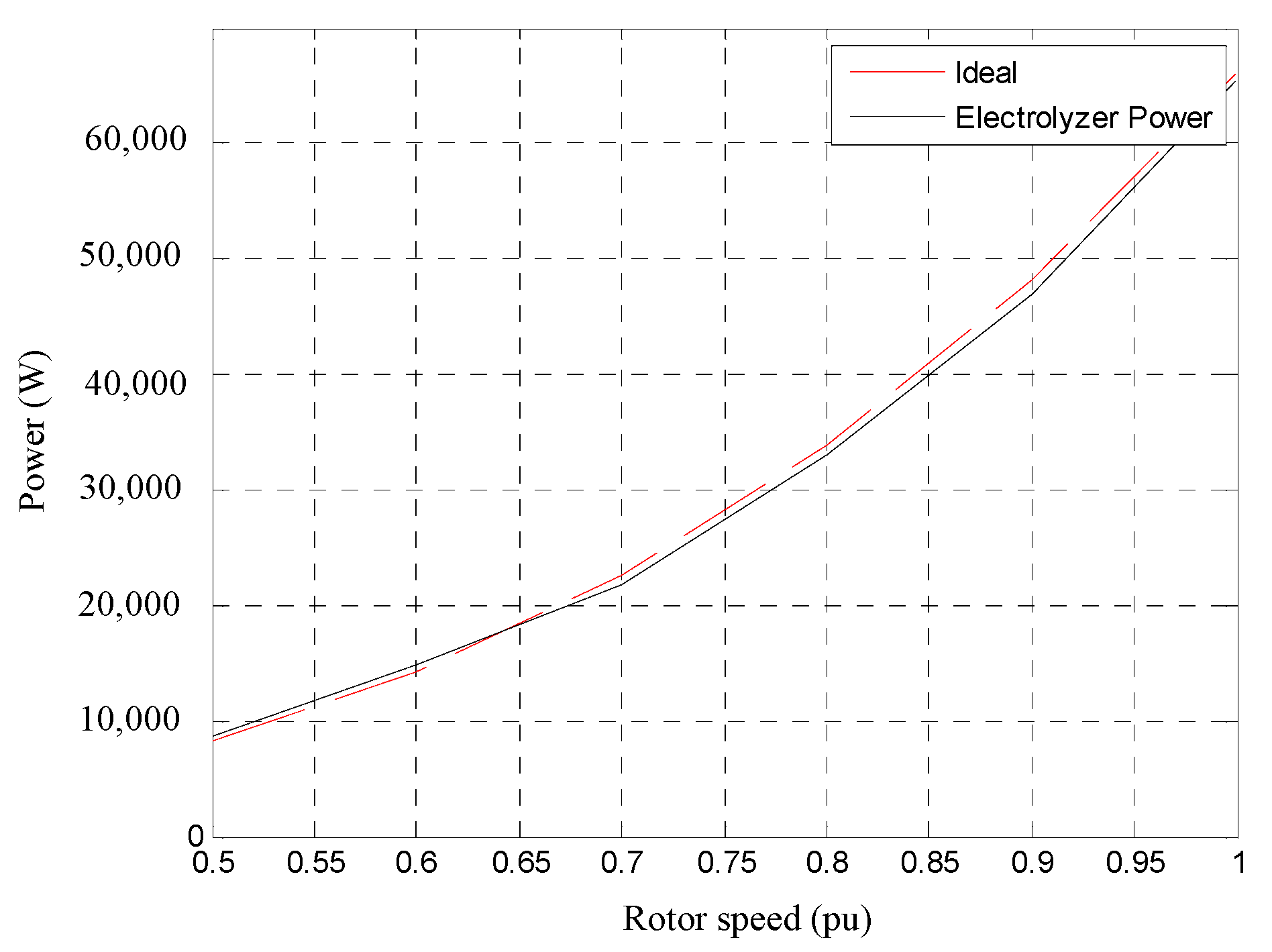
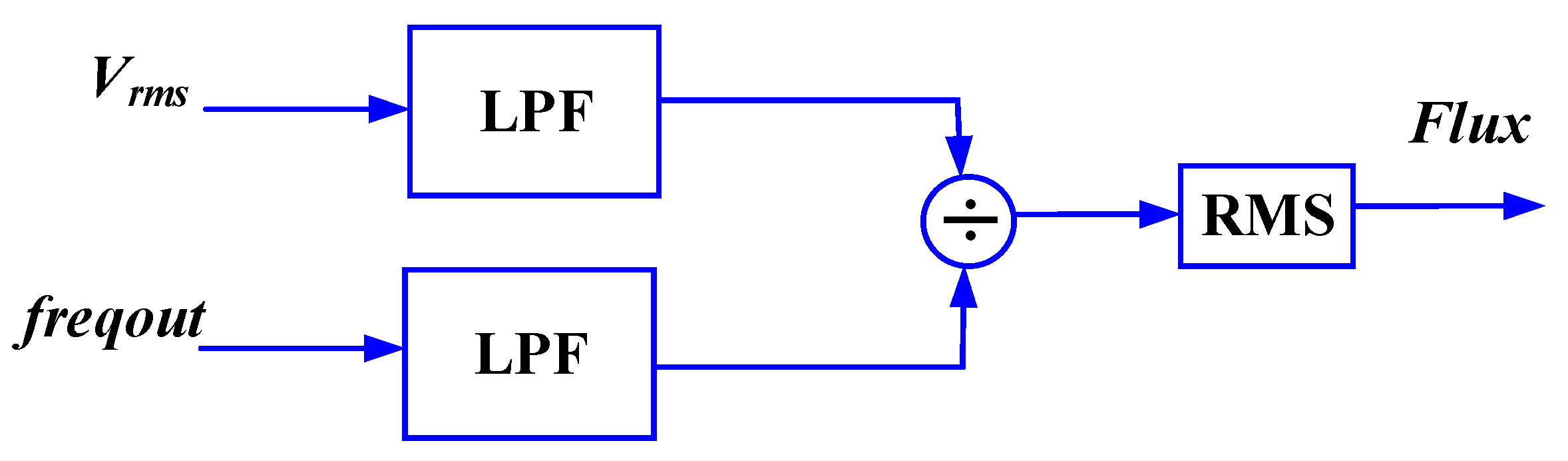
2.2. Electrolyzer Model
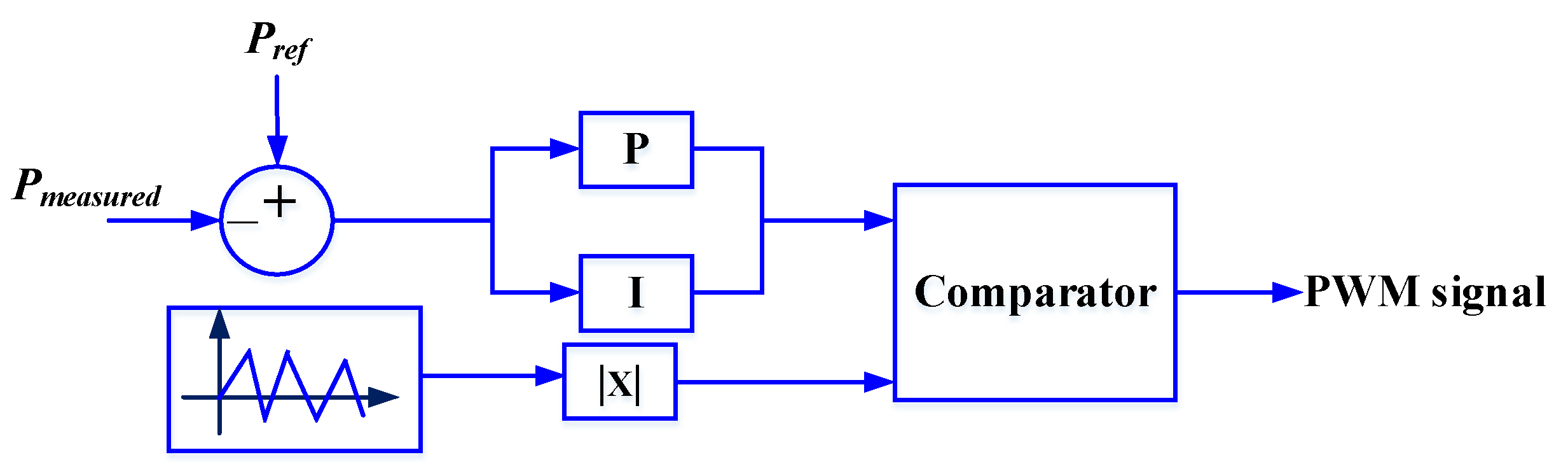
2.3. Power Control
2.4. Capacitor Selections
2.5. Modified System Configuration of the Electrolyzer Model Circuit
3. Computer Simulation Analysis and Discussion
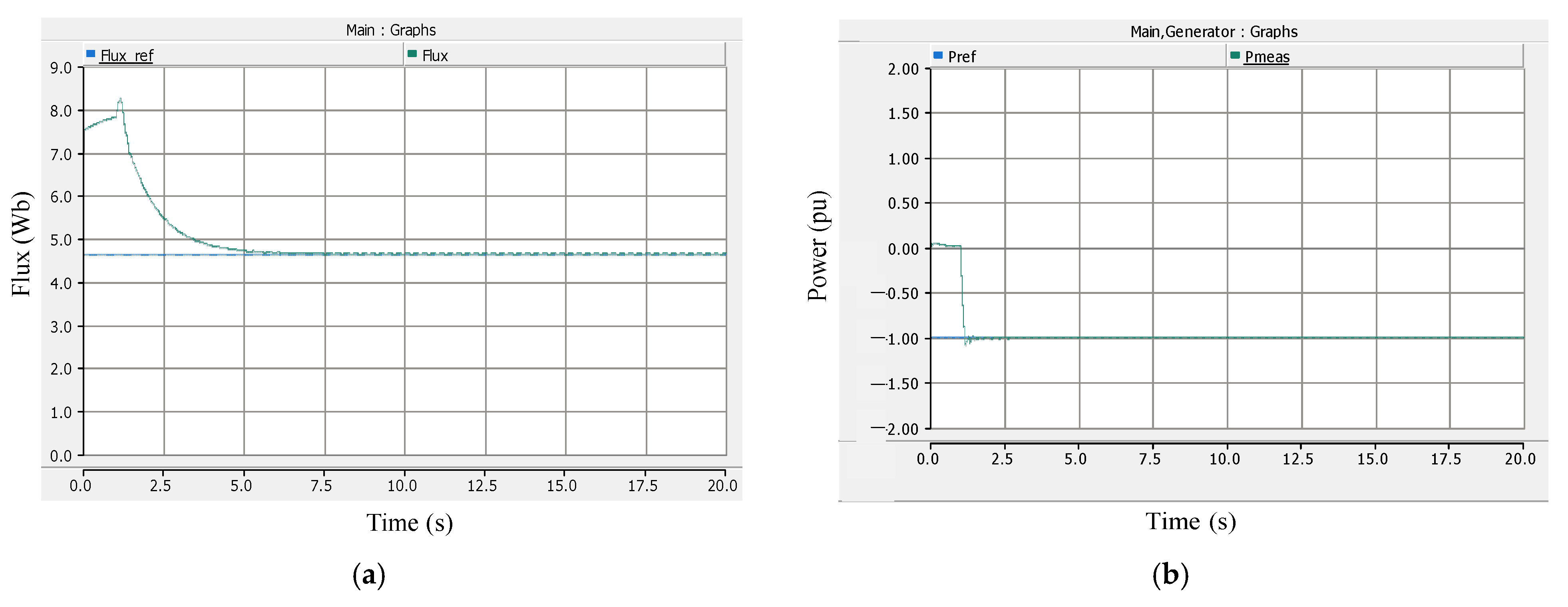
Modified System Configuration of the Electrolyzer: Results and Analysis
- Case I: SEIG speed of 1.01 pu and source breaker opened at 1.5 s.
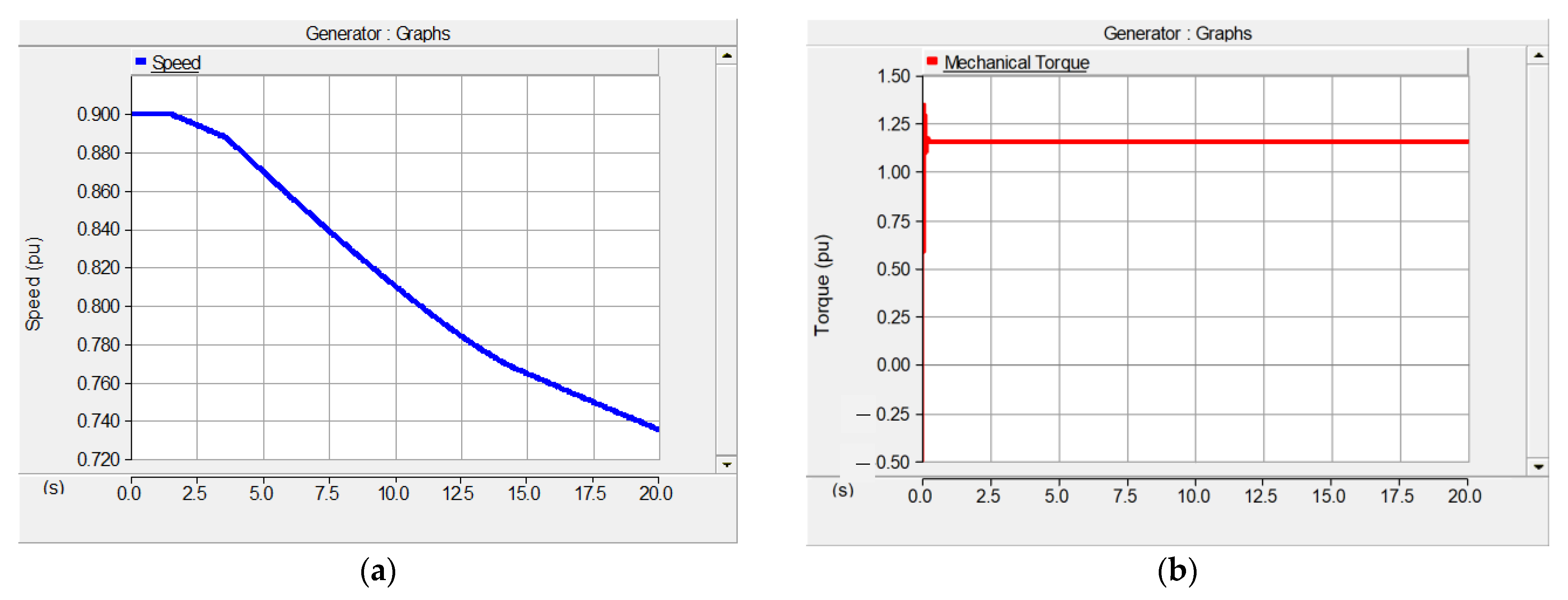
- Case II: SEIG speed of 0.9 pu and source breaker opened at 10 s.
- Case III: SEIG low speed of 0.5 pu with source breaker closed throughout system operation.
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Bansal, R.C.; Bhatti, T.S.; Kothari, D.P. A bibliographical survey on induction generators for application of non-conventional energy systems. IEEE Trans. Energy Convers. 2003, 18, 433–439. [Google Scholar] [CrossRef]
- Bansal, R.C. Three-Phase Self Excited Induction Generators: An Overview. IEEE Trans. Energy Convers. 2005, 20, 292–299. [Google Scholar] [CrossRef]
- Na, W.; Muljadi, E.; Lengthy, B.; Kim, J. Active Power and Flux Control of a Self-Excited Induction Generator for a Variable-Speed Wind Turbine Generation. In Proceedings of the 2017 IEEE Annual Green Tech, Denver, CO, USA, 29–31 March 2017; pp. 177–181. [Google Scholar]
- Muljadi, E.; Gregory, B.; Broad, D. Self-Excited Induction Generator for Variable-Speed Wind Turbine Generation; NREL/CP-440-21436; National Renewable Energy Lab: Golden, CO, USA, 1996. Available online: https://www.nrel.gov/docs/legosti/old/21436.pdf (accessed on 3 March 2021).
- Nesba, A.; Ibtiouen, R.; Mekhtoub, S.; Touhami, O.; Bacha, S.; Riu, D.; Benhaddadi, M. Analysis of self-excited induction generator feeding DC loads for low-cost renewable energy applications. In Proceedings of the 2009 IEEE International Electric Machines and Drives Conference, Miami, FL, USA, 3–6 May 2009; pp. 812–817. [Google Scholar] [CrossRef]
- Kesler, S.; Tayyip, D. A voltage regulation system for independent load operation of standalone self-excited induction generators. J. Power Electron. 2016, 5, 1869–1883. [Google Scholar] [CrossRef] [Green Version]
- Khan, M.J.; Iqbal, M.T. Dynamic Modeling and Simulation of a small wind-fuel cell hybrid energy system. Renew. Energy 2005, 30, 421–439. [Google Scholar] [CrossRef]
- Sichilalu, A.; Tazvinga, H.; Xiaohua, X. Optimal control of a fuel cell/wind/PV/grid hybrid system with thermal heat pump load. Sol. Energy 2016, 135, 59–69. [Google Scholar] [CrossRef] [Green Version]
- Takahasi, R.; Kinoshita, H.; Murata, T.; Tamura, J.; Sugimasa, M.; Komura, A.; Futami, M.; Ichinose, M.; Ide, K. Output Power Smoothing and Hydrogen Production by Using Variable Speed Wind Generators. IEEE Trans. Ind. Electron. 2010, 57, 485–493. [Google Scholar] [CrossRef]
- Çalgan, H.; Ilten, E.; Demirtas, M. Thyristor controlled reactor-based voltage and frequency regulation of a three-phase self-excited induction generator feeding unbalanced load. Int. Trans. Electr. Energy Syst. 2020, 30, e12387. [Google Scholar] [CrossRef]
- Kalaivani, C.; Rajambal, K. Modeling of an Efficient High Power Wind Energy Conversion System using Self-excited Multi-phase Machines. Microproce. Microsys. 2020, 74, 103020. [Google Scholar] [CrossRef]
- Wang, B.; Xian, L.; Manandhar, U.; Ye, J.; Zhang, X.; Gooi, H.B.; Ukil, A. Hybrid energy storage system using bidirectional single-inductor multiple-port converter with model predictive control in DC microgrids. Electr. Power Syst. Res. 2019, 173, 38–47. [Google Scholar] [CrossRef]
- Wu, W.; Wang, H.; Liu, Y.; Huang, M.; Blaabjerg, F. A Dual-Buck-Boost AC/DC Converter for DC Nano grid With Three Terminal Outputs. IEEE Trans. Ind. Electron. 2017, 64, 295–299. [Google Scholar] [CrossRef]
- Shahidehpour, M.; Li, Z.; Gong, W.; Bahramirad, S.; Lopata, M. A Hybrid AC/DC Nano grid: The Keating Hall Installation at the Illinois Institute of Technology. IEEE Electrif. Mag. 2017, 9, 36–46. [Google Scholar] [CrossRef]
- Nayanar, V.; Kumaresan, N.; AmmasaiGounden, G. Wind-driven SEIG supplying DC microgrid through a single-stage power converter. Eng. Sci. Technol. Int. J. 2016, 19, 1600–1607. [Google Scholar] [CrossRef] [Green Version]
- Kumar, S.; Vijayakumar, K. Simulation and experimental comparative analysis of the DC-DC converter topologies for wind-driven SEIG fed DC nano grid. Electr. Power Syst. Res. 2020, 181, 106196. Available online: https://hvdc.ca/pscad (accessed on 21 March 2021). [CrossRef]
- Nie, J.; Chen, Y.; Boehm, R.F. Numerical modeling of two-phase flow in a bipolar plate of a PEM electrolyzer cell. In Proceedings of the ASME 2008 International Mechanical Engineering Congress and Exposition, Boston, MA, USA, 31 October–6 November 2008; pp. 783–788. [Google Scholar]
- Hernandez-Gomez, A.; Ramirez, V.; Guilbert, D. Investigation of PEM electrolyzer modeling: Electrical domain, efficiency, and specific energy consumption. Int. J. Hydrog. Energy 2020, 45, 14625–14639. [Google Scholar] [CrossRef]
- Sarrias-Mena, R.; Fernadez-Ramirez, L.; Andrés, C.; Jurado, F. Electrolyzer models for hydrogen production from wind energy systems. Int. J. Hydrog. Energy 2015, 40, 2927–2938. [Google Scholar] [CrossRef]
- Fang, R.; Liang, Y. Control strategy of electrolyzer in a wind-hydrogen system considering the constraints of switching times. Int. J. Hydrog. Energy 2019, 44, 25104–25111. [Google Scholar] [CrossRef]
- Alongae, F.; Collura, S.M.; D’lpopolito, F.; Guilbert, D.; Luna, M.; Vitale, G. Design of a robust controller for DC/DC converter-electrolyzer systems supplied by u WECSs subject to highly fluctuating wind speed. Cont. Eng. Pract. 2020, 98, 10483. [Google Scholar]
- Firtina-Ertis, I.; Acar, C.; Erturk, E. Optimal sizing design of an isolate stand-alone hybrid wind-hydrogen system for a zero-energy house. Appl. Energy 2020, 274, 115244. [Google Scholar] [CrossRef]
- Inna Eck Presse-und Öffentlichkeitsarbeit and Fraunhofer-Institut für Windenergiesysteme IWES. 2021. Wind Turbines with Integrated Electrolyzer Demonstrate Sustainable Hydrogen Production at Sea. Available online: https://idw-online.de/de/news774469 (accessed on 28 October 2021).

































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Rated capacity of electrolyzer | 0.66 MW |
| Internal resistance (R0) | 0.5 Ω |
| Internal voltage (V0) | 1407.5 V |
| Parameter | Value |
|---|---|
| Rated capacity of electrolyzer | 0.066 MW |
| Internal resistance (R0) | 0.45 Ω |
| Internal voltage (V0) | 422.25 V |
| Rotor Speed | Capacitor |
|---|---|
| 1.0 pu | 7250 µF |
| 0.9 pu | 9250 µF |
| 0.8 pu | 13,000 µF |
| 0.7 pu | 17,000 µF |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Na, W.; Muljadi, E.; Han, S.; Tagayi, R.K.; Kim, J. Possibility of Power Electronics-Based Control Analysis of a Self-Excited Induction Generator (SEIG) for Wind Turbine and Electrolyzer Application. Electronics 2021, 10, 2743. https://doi.org/10.3390/electronics10222743
Na W, Muljadi E, Han S, Tagayi RK, Kim J. Possibility of Power Electronics-Based Control Analysis of a Self-Excited Induction Generator (SEIG) for Wind Turbine and Electrolyzer Application. Electronics. 2021; 10(22):2743. https://doi.org/10.3390/electronics10222743
Chicago/Turabian StyleNa, Woonki, Eduard Muljadi, Seungyun Han, Roland Kobla Tagayi, and Jonghoon Kim. 2021. "Possibility of Power Electronics-Based Control Analysis of a Self-Excited Induction Generator (SEIG) for Wind Turbine and Electrolyzer Application" Electronics 10, no. 22: 2743. https://doi.org/10.3390/electronics10222743
APA StyleNa, W., Muljadi, E., Han, S., Tagayi, R. K., & Kim, J. (2021). Possibility of Power Electronics-Based Control Analysis of a Self-Excited Induction Generator (SEIG) for Wind Turbine and Electrolyzer Application. Electronics, 10(22), 2743. https://doi.org/10.3390/electronics10222743