1. Introduction
The application of wireless charging technologies, used in small devices, such as smartphones, laptops, and game consoles, to large devices, such as electric vehicles and robots, has been extensively researched [
1,
2,
3]. As most small devices use the proximity magnetic induction method, the distance between the transmitting and receiving coils is less than a few millimeters, and the transmission power is approximately tens of Watts [
4]. Conversely, most large devices transmit approximately several kilowatts of power, rendering it difficult to use the proximity wireless charging method, owing to their structure. For instance, in the wireless charging system proposed by the SAE J295 standard, BMW, and Hyundai Motors, the distance between the transmitting and receiving coils is found to be approximately 15–30 cm because the transmitting and receiving pads for wireless charging are located on the floor and under the vehicle, respectively [
5,
6]. Therefore, such systems primarily use the magnetic resonance method, which allows power transmission to occur at a few meters. In this case, both transmission efficiency and safety should be considered because a high power level is exposed to the outside environment. Techniques for detecting foreign objects placed between the transmitting and receiving coils should be investigated. If a metallic object (MO) exists between the transmitting and receiving coils, circuit damage, fire, and burns may occur. Conversely, if a living object (LO) appears between the coils, the danger may be life-threatening. Therefore, foreign object detection (FOD) technology is an essential function that must be practiced in industry organization standards, such as the Wireless Power Consortium and SAE International.
Wave-based and field-based detection methods are being investigated at an increasing rate, for FOD methods in high-power wireless charging systems [
7,
8,
9]. Wave-based detection methods require additional sensing devices, such as imaging cameras, thermal cameras, or radar sensors, to construct monitoring systems for wireless charging. The collected information is then digitally processed to detect the foreign object (FO). Therefore, these expensive wave-based detection methods are difficult to integrate into wireless charging systems. Conversely, field-based detection methods detect the electrical characteristic change-induced voltage, resonant frequency, and quality factor caused by the MO that exists between the transmitting and receiving coils. According to the configuration method of the characteristic change detection circuit, field-based methods are suitable for metallic object detection (MOD) and living object detection (LOD) when the change in inductance and capacitance, respectively, can be measured with ease [
9].
In most detection circuits that measure the variations in inductance and detection coils, other than transmission coils, are added to detect MOs that are relatively small in comparison with the transmitting and receiving coils [
8,
9,
10]. Herein, the detection coil is placed between the transmitting and receiving coils. As the inductance of the detection coil is affected by the MO, the change in location of the transmitting and receiving coils, and the surrounding conditions, such as temperature, various balanced coil structures with a reference coil have been proposed.
Methods that make use of detection coils can be divided into passive and active methods. Passive methods use the voltage induced in the detection coil during the power transmission [
11]. As there is no power supply other than power transmission, the interference in power transmission is not found to be substantial. However, MOs inserted before power transmission cannot be removed before the transmission of power as they are detected only during the power transmission. In the active method, power is supplied separately to the detection coil [
9,
12]. This method is safer than the passive method because both the detection and removal of MOs are possible before power transmission.
In [
13], multiple loop coil sets are proposed instead of one loop coil that can cover an entire plane. This increases the sensitivity via a relative increase in in the eddy current that is induced by the MO. In [
9], multi-layer multi-loop detection coils are proposed. In order to overcome the issue of detection sensitivity becoming reduced when an MO is placed outside of the center of the loop coil, the coils are overlapped on multi layers. This reduces blind spots, but the circuit becomes complicated because each layer must be operated with a time difference.
In this study, we propose a metal object detection method using an active non-overlapped two-layer multi-loop detection coil. As in the previous papers, the sensitivity is increased by arranging relatively small coils. In order to reduce the mutual interference between the coils, it has been constructed using two-layers, although it uses simple circuits which are able to operate at the same time because they do not overlap. Additionally, the most remarkable feature is that the impedance variation, which is induced by a metal object, is measured by using the change of phase as well as the magnitude of the current or voltage. The remainder of this paper is organized as follows.
Section 2 explains the proposed MOD method, and
Section 3 describes the experimental results of the implemented system.
Section 4 summarizes the conclusions of the study.
2. Materials and Methods
MOs are detected by detecting changes in magnetic fields, which are induced by mutual inductance between MOs and detection coils. If the inductance of a detection coil is too large compared to the inductance of an MO, it is difficult for the MO to induce a detectable level of magnetic field change in the detection coil. Conversely, if the inductance of a detection coil is too small compared to the inductance of an MO, a significant magnetic field change occurs, but the circuit becomes complicated. Therefore, instead of designing one large coil to cover the entire detection area, the coils have been designed to detect MOs in each small area by dividing the detection area into smaller segments.
Figure 1 illustrates the structure of the detection coil array of the proposed MOD system. The detection coil array can be divided into an N × M grid, as depicted in
Figure 1a.
If magnetic field change detection circuits are configured for each coil, the MOD system becomes complicated, so several coils are connected to one detection circuit. First, as shown in
Figure 1b, the coils in the even-numbered row in the first column are connected to form a Col
1 set. In the second column, the coils in the odd-numbered row are connected to form a Col
2 set. Again, in the third column, the coils in the even-numbered row are connected to form a Col
3 set. By repeating this process, a total of M coil sets are created. As shown in
Figure 1b, the area where the first layer with M coil sets can detect MOs is half of the total area. The second layer connects the coils that cover the other half of the area in a horizontal direction rather than a vertical direction. As shown in
Figure 1c, the coils in the odd-numbered column in the first row are connected to form Row
1 set. In the second row, the coils in the even-numbered row are connected to form Row
2 set. By repeating this, a total of N coil sets are created.
Figure 1b,c indicate that the detection coils of the first and second layers are placed across each other in a way that the detection coils do not overlap.
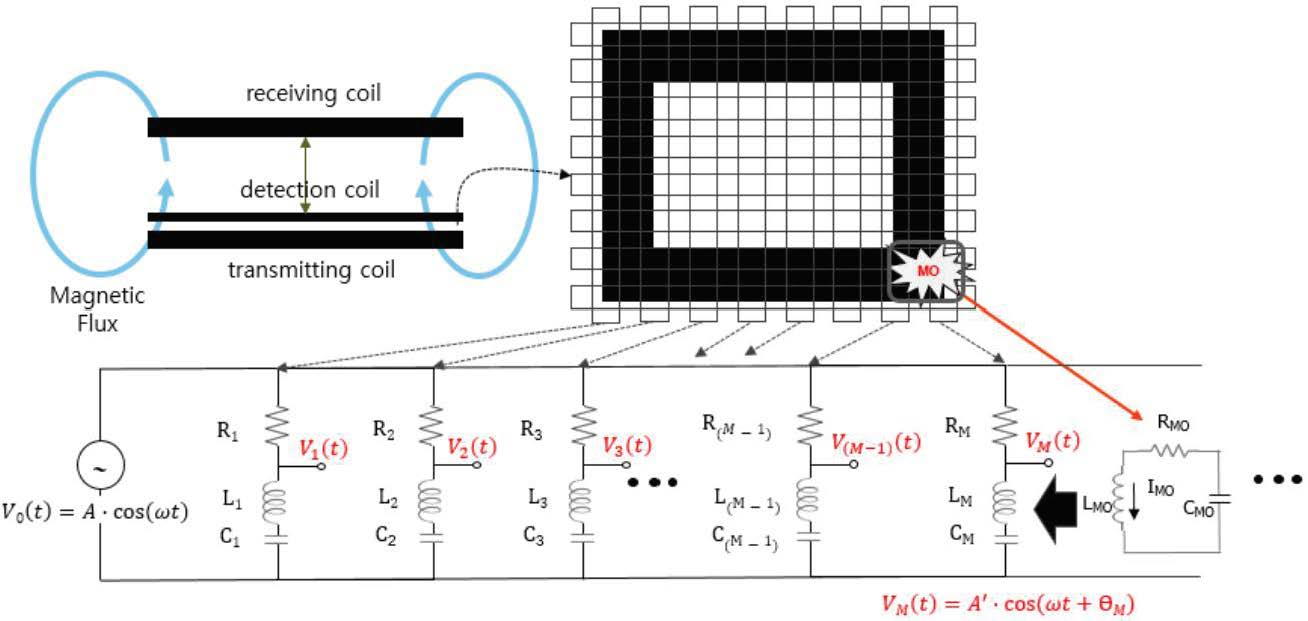
Figure 2 depicts the circuit, which includes the first layer detection coil array. It can be seen that L1 is an equivalent inductor for the N/2 detection coils in the first column, whereas LM is the equivalent inductor for the N/2 detection coils included in the Mth column. To increase the change in voltage induced by the MOs, a capacitor is connected serially to each coil set. The capacitance of the capacitor is selected such that a serial LC resonant circuit is configured for the frequency of the alternating current (AC) power that is supplied to the detection coil array.
The resistor R determines the bandwidth and current of the LC resonant circuit. A low value of resistance generates a narrow bandwidth, which results in a sensitive circuit that requires time for stabilizing. Conversely, a high resistance value widens the bandwidth, which reduces the current and results in a reduced amplitude change of the signal. Consequently, it is difficult to detect the changes caused by foreign metal objects.
As indicated in
Figure 2, the voltage of each coil set is measured at the node between the resistor
RN and coil set
LN to compare the magnitude and phase of the voltage. Initially, we considered the voltage magnitude and phase at node 1 when MO was absent between the transmitting and receiving coils. The frequency and phase of the power source can be calculated as f = ω/(2π) and θ, respectively. We applied Kirchhoff’s voltage law to the first column detection coil set to express it in phasor, and the supply voltage
VAC and voltage
V1 at node 1 can be obtained as follows:
The impedance
Z for each column and impedance
Z1 between the ground and node 1 can be expressed as follows:
As the frequency of the voltage supplied is the resonant frequency of the series L1 and C1 circuits, the reactance of Z, jωL1 + 1/(jωC1), is zero. Therefore, Z = R1 in Equation (3), V1 = 0 in Equation (2), and Z1 = 0 in Equation (4).
Subsequently, we considered a case where the MO exists on a detection coil. As indicated in
Figure 3, the MO is modeled as an
RM-
LM-
CM series circuit, and the MO is placed on the detection coil set
L1, where M denotes the mutual inductance between
L1 and
LM.
When Kirchhoff’s voltage law is applied to the detection coil set with
L1 and MO, the voltage
V1w at node 1 changes, owing to the mutual inductance between
L1 and
LMO.
where
V1w and
I1w indicate that the voltage generated at node 1 by the MO and the current flowing through the detection coil set are different from those previously observed. Equation (6) verifies that the resistance and reactance components are modified by the presence of the MO. The impedance
Zw in the first column is changed by the MO, and the impedance
Z1w between the ground and node 1 can be calculated as follows:
Similarly, as
jωL1 + 1/(
jωC1) = 0,
Zw and
Z1w can be simplified as
Figure 4a,b depicts the phasor diagrams of impedance, beginning from the ground, capacitor, inductor, and resistor sequentially, considering the presence and absence of the MO, respectively.
Figure 4a indicates that the impedance
Z1 =
j(
ωL1 − 1/(
ωC1) at node 1 is zero in the absence of the MO, owing to
ωL1 = 1/(
ωC1) and the impedance
Z =
R1 on the entire bridge. In other words, the phase of the voltage
VAC applied to
Z, and that of current
I1 are identical because only the resistance component exists. Additionally,
R1,
L1, and
C1 exist on one bridge, resulting in identical currents in
IR1,
IL1, and
IC1. At node 1, with an inductor, the voltage is 90° faster than the current. Consequently, the phase of
V1 is 90° faster than that of current
IL1, and a 90-degree phase difference exists between
VAC and
V1.
When the MO is inserted, the resistance component increases and the reaction component decreases, as indicated in Equation (9). Therefore, the phase of impedance
Z1w is no longer zero, as depicted in
Figure 4b. As the impedance
Z1w at node 1 has a constant magnitude, owing to the increased resistance and reduced reaction, the magnitude of the voltage is not zero, and the phase of the voltage
VAC and current
I1w on the bridge differ by the phase θ of
Zw. Furthermore, the phase of the voltage at node 1, which is 90° faster than the phase of current
I1w, results in a phase difference of 90–θ° between the voltage
V1w and the power source voltage
VAC. In other words, the voltage signal becomes greater than that observed in the circuit without the MO, and the phase difference with the voltage
VAC decreases by the phase θ of the changed impedance.
To detect the MO, we propose multiplying the voltage magnitude at the node by the phase difference and calculating the rate of change, using Equation (11). However, because the phase difference decreases by phase θ of the inserted MO, the rate of change is calculated as 90 − (phase difference) = 90 − (90 − θ) = θ, such that the phase difference has a larger value when MO is inserted.
At this juncture, the reference values are the values measured in the absence of the MO. If a change of more than a certain magnitude is detected compared to the value observed in the absence of the MO, we considered that the MO was inserted.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}


