
Evaluation of Multi-Objective Optimization Techniques for Resilience Enhancement of Electric Vehicles



Abstract
:1. Introduction
2. Multi-Objective Optimization Methods and Energy Allocation to EVs
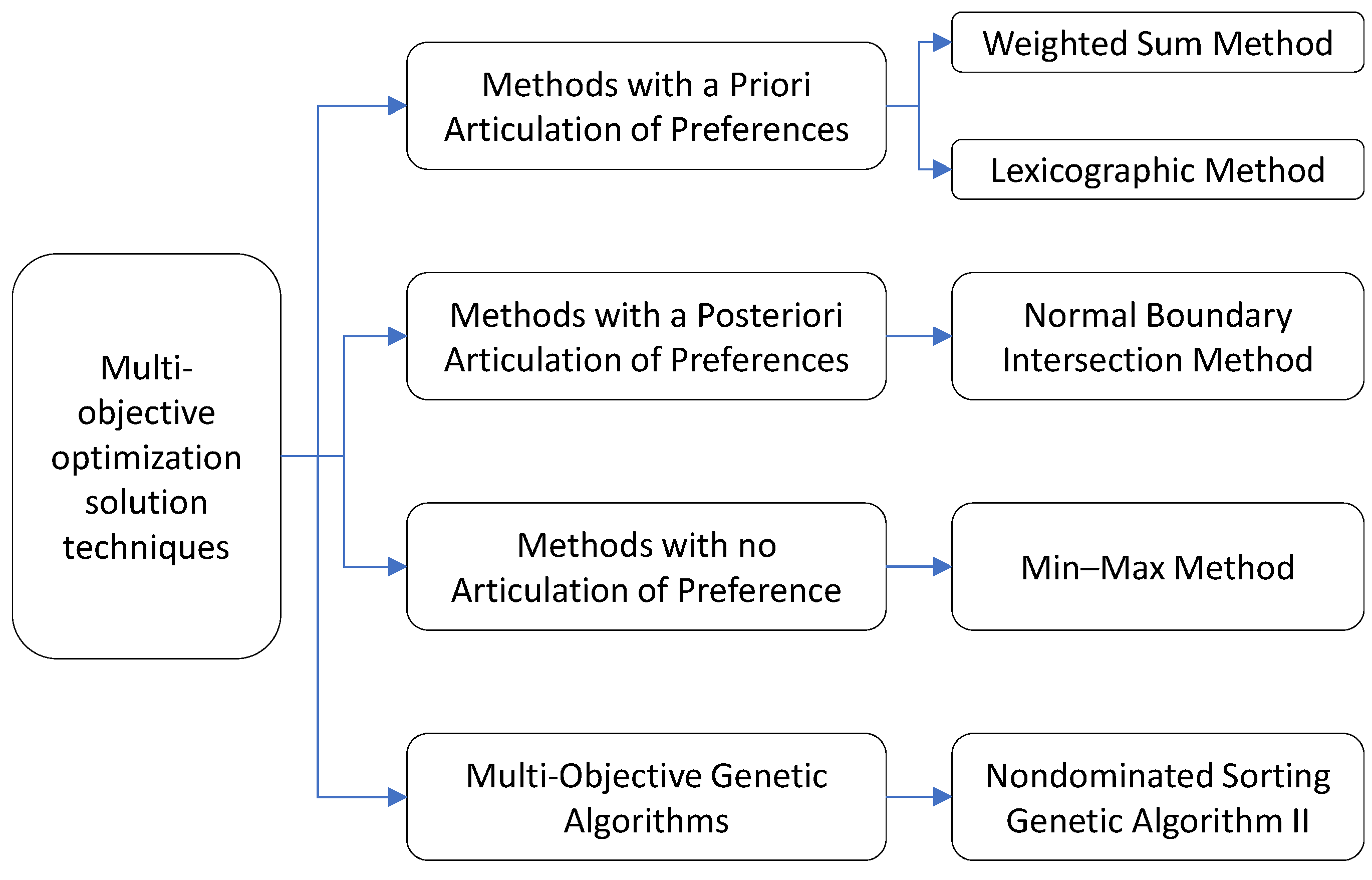
2.1. Categorization of Multi-Objective Optimization Techniques
2.2. Energy Allocation to EVs during Contingencies
2.2.1. Power Contingencies and EVs
2.2.2. MOO for Power Allocation to EVs
3. Overview of Selected MOO Techniques
3.1. Weighted-Sum Method
3.2. Lexicographic Method
3.3. Normal Boundary Intersection Method
3.4. Min–Max Method
3.5. Nondominated Sorting Genetic Algorithm II
3.6. Performance Evaluation Indices
4. Simulation Results
4.1. Input Data
4.2. Weighted-Sum Method
4.3. Lexicographic Method
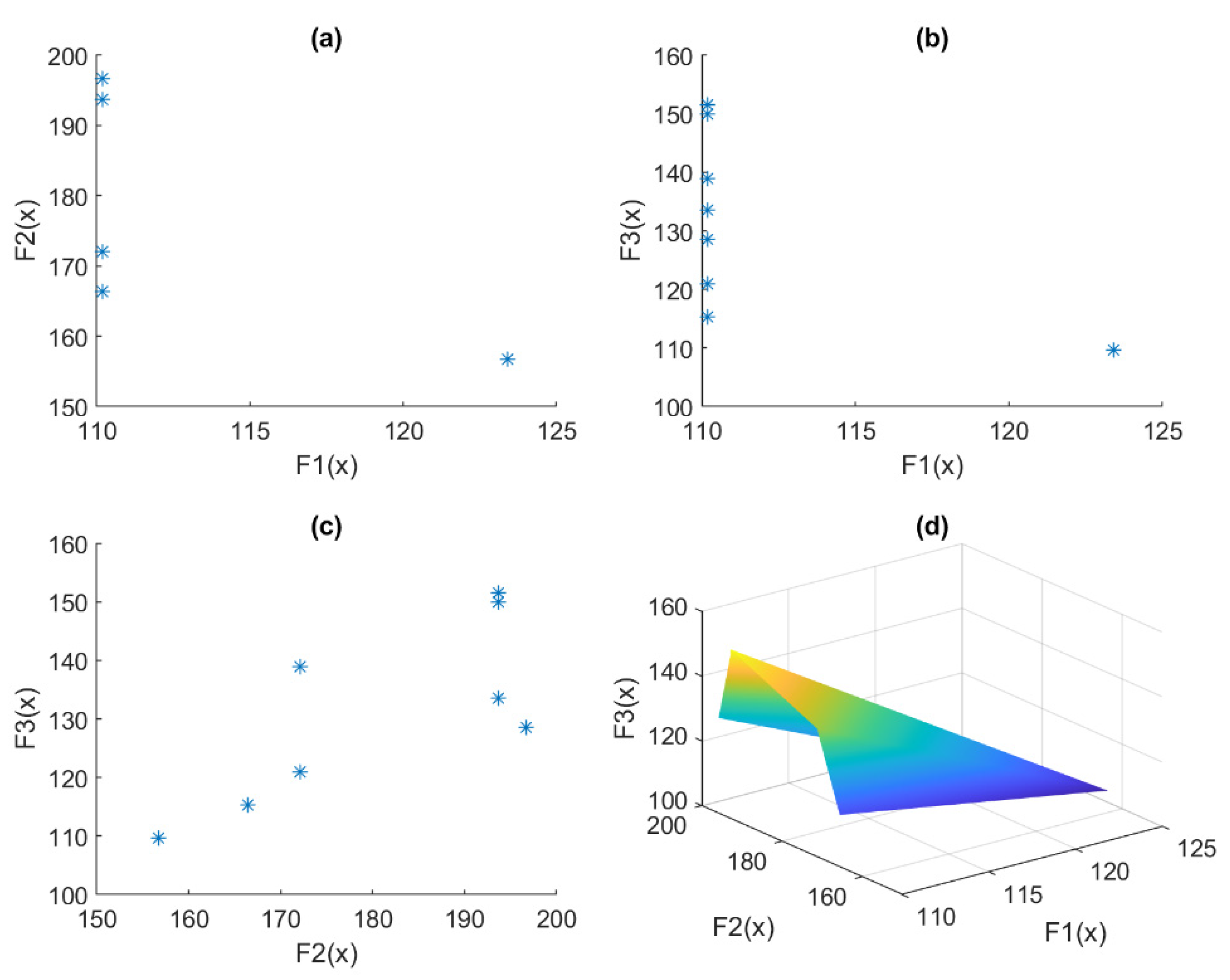
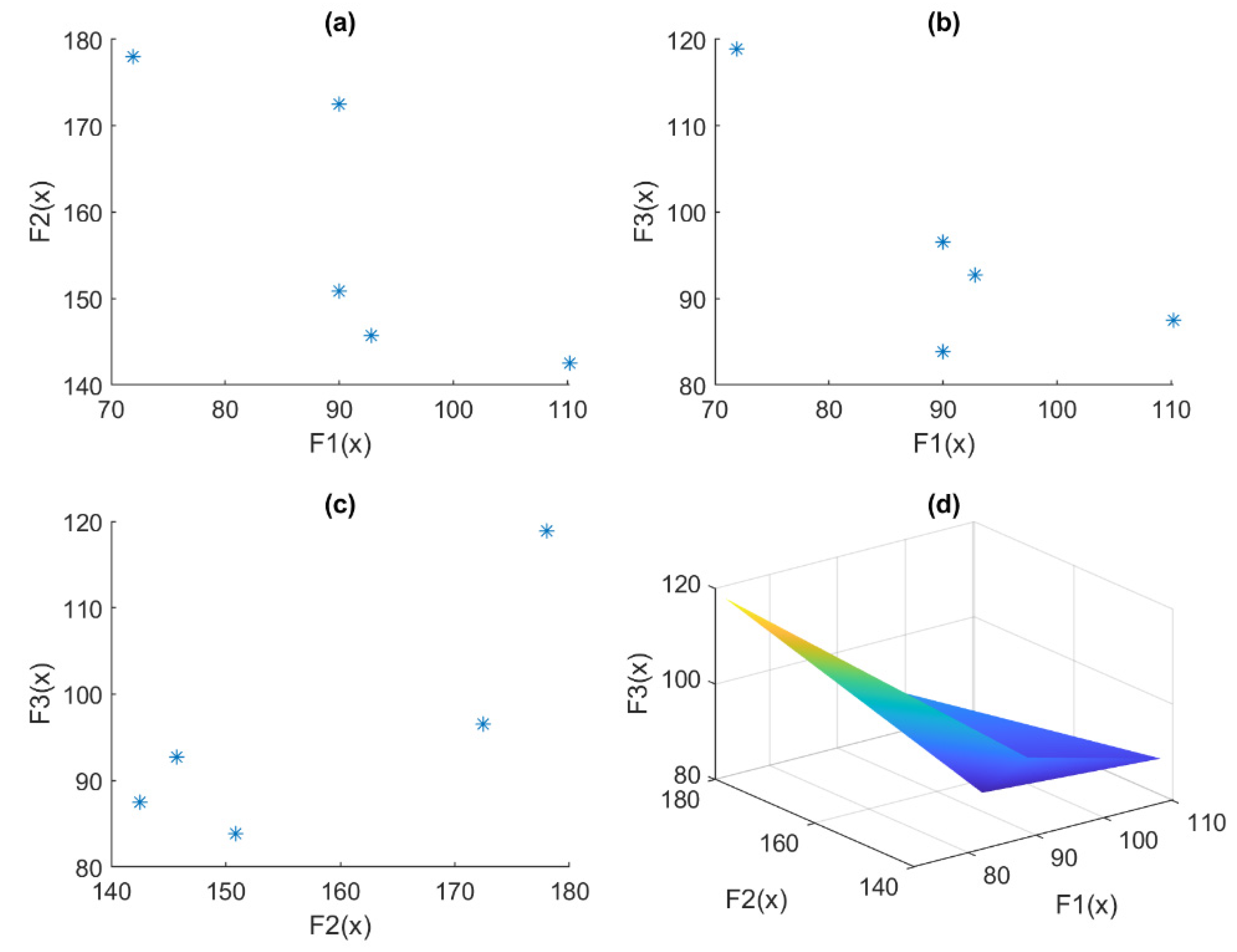
4.4. Normal Boundary Intersection Method
4.5. Min–Max Method
4.6. Nondominated Sorting Genetic Algorithm II
5. Discussion and Analysis
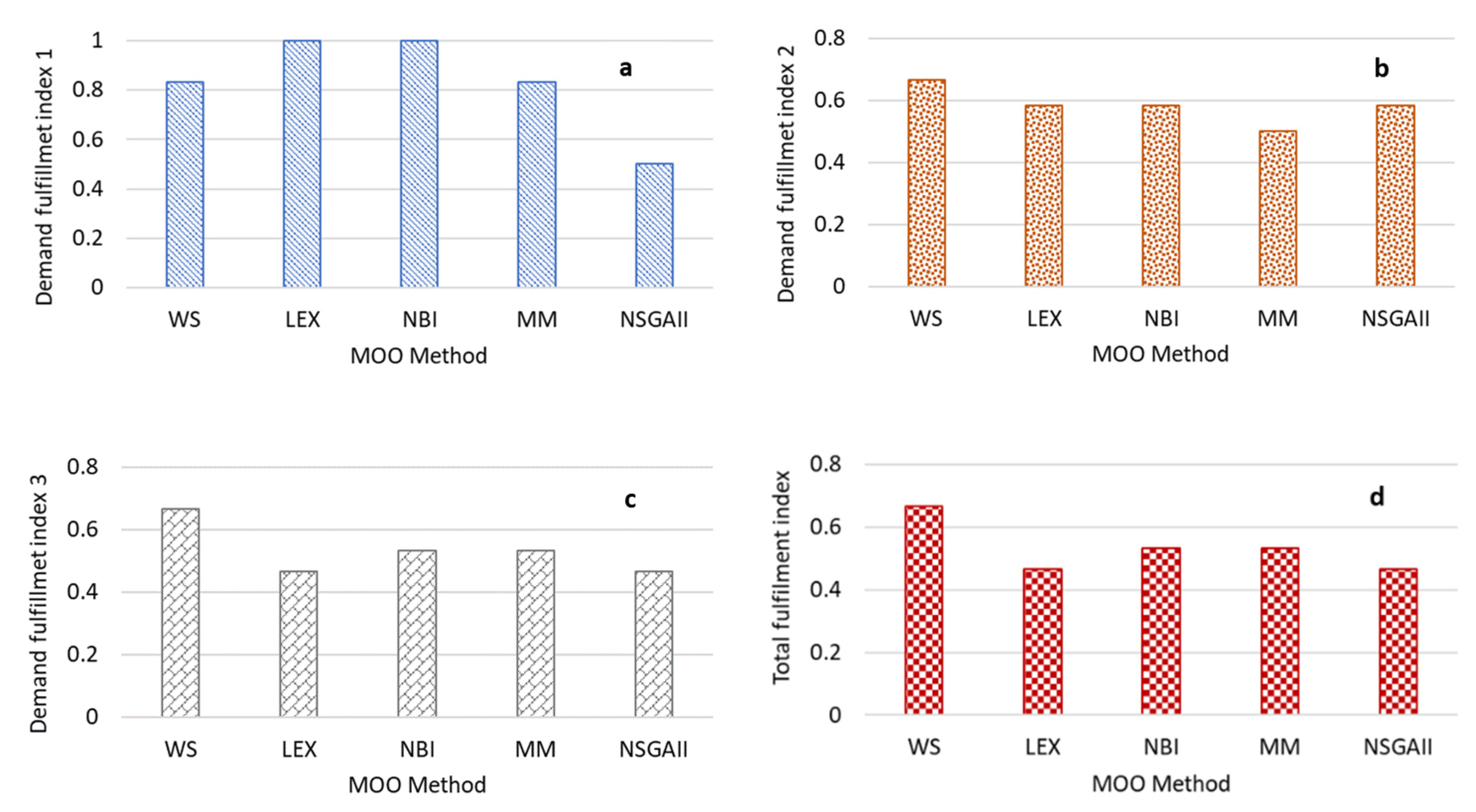
5.1. Evaluation via Performance Indices
5.2. Complexity and Variance Analysis
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Motta, R.D.S.; Afonso, S.M.; Lyra, P.R. A modified NBI and NC method for the solution of N-multiobjective optimization problems. Struct. Multidiscip. Optim. 2012, 46, 239–259. [Google Scholar] [CrossRef]
- Chang, K.H. Multiobjective optimization and advanced topics. In Design Theory and Methods Using CAD/CAE: The Computer Aided Engineering Design Series; Elsevier: Amsterdam, The Netherlands, 2015; pp. 325–406. [Google Scholar]
- Marler, R.T.; Arora, J.S. Survey of multi-objective optimization methods for engineering. Struct. Multidiscip. Optim. 2004, 26, 369–395. [Google Scholar] [CrossRef]
- Zhu, W.; Guo, J.; Zhao, G. Multi-objective sizing optimization of hybrid renewable energy microgrid in a stand-alone marine context. Electronics 2021, 10, 174. [Google Scholar] [CrossRef]
- Hussain, A.; Kim, H.M. Goal-programming-based multi-objective optimization in off-grid microgrids. Sustainability 2020, 12, 8119. [Google Scholar] [CrossRef]
- Li, F.F.; Qiu, J. Multi-objective optimization for integrated hydro–photovoltaic power system. Appl. Energy 2016, 167, 377–384. [Google Scholar] [CrossRef]
- Roberts, J.J.; Cassula, A.M.; Silveira, J.L.; da Costa Bortoni, E.; Mendiburu, A.Z. Robust multi-objective optimization of a renewable based hybrid power system. Appl. Energy 2018, 223, 52–68. [Google Scholar] [CrossRef] [Green Version]
- Pan, C.; Tao, S.; Fan, H.; Shu, M.; Zhang, Y.; Sun, Y. Multi-objective optimization of a battery-supercapacitor hybrid energy storage system based on the concept of cyber-physical system. Electronics 2021, 10, 1801. [Google Scholar] [CrossRef]
- Ahmadi-Nezamabad, H.; Zand, M.; Alizadeh, A.; Vosoogh, M.; Nojavan, S. Multi-objective optimization based robust scheduling of electric vehicles aggregator. Sustain. Cities Soc. 2019, 47, 101494. [Google Scholar] [CrossRef]
- Kang, Q.; Feng, S.; Zhou, M.; Ammari, A.C.; Sedraoui, K. Optimal load scheduling of plug-in hybrid electric vehicles via weight-aggregation multi-objective evolutionary algorithms. IEEE Trans. Intell. Transp. Syst. 2017, 18, 2557–2568. [Google Scholar] [CrossRef]
- Shahab, M.; Wang, S.; Junejo, A.K. Improved control strategy for three-phase microgrid management with electric vehicles using multi objective optimization algorithm. Energies 2021, 14, 1146. [Google Scholar] [CrossRef]
- Marzoghi, A.F.; Bahramara, S.; Adabi, F.; Nojavan, S. Interval multi-objective optimization of hydrogen storage based intelligent parking lot of electric vehicles under peak demand management. J. Energy Storage 2020, 27, 101123. [Google Scholar] [CrossRef]
- Fu, X.; Zhang, Q.; Tang, J.; Wang, C. Parameter matching optimization of a powertrain system of hybrid electric vehicles based on multi-objective optimization. Electronics 2019, 8, 875. [Google Scholar] [CrossRef] [Green Version]
- Hussain, A.; Kim, H.M. EV prioritization and power allocation during outages: A lexicographic method-based multi-objective optimization approach. IEEE Trans. Transp. Electrif. 2021, 7, 2474–2487. [Google Scholar] [CrossRef]
- Bari, N.; Haque, A.; Ahuja, G.; Kurukuru, V.B. Priority based power delivery system for electric vehicle charging. In European, Asian, Middle Eastern, North African Conference on Management & Information Systems; Springer: Cham, Switzerland, 2021; pp. 36–45. [Google Scholar]
- Alsabbagh, A.; Yin, H.; Ma, C. Distributed charging management of multi-class electric vehicles with different charging priorities. IET Gener. Transm. Distrib. 2019, 13, 5257–5264. [Google Scholar] [CrossRef]
- Lalonde, N. Multiobjective Optimization Algorithm Benchmarking and Design under Parameter Uncertainty. Ph.D. Thesis, Queen’s University, Kingston, ON, Canada, 2009. [Google Scholar]
- IEA. Global EV Outlook 2021-Accelerating Ambitions despite the Pandemic. 2021. Available online: www.iea.org/t&c/ (accessed on 7 September 2021).
- Feng, N.; Yan, L.; Wu, K.; Shi, M.; Zhou, J.; Chen, X. Hierarchical optimization of electric vehicle system charging plan based on the scheduling priority. J. Circuits Syst. Comput. 2019, 28, 1950221. [Google Scholar]
- Ivanova, A.; Chassin, D.; Aguado, J.; Crawford, C.; Djilali, N. Techno-economic feasibility of a photovoltaic-equipped plug-in electric vehicle public parking lot with coordinated charging. IET Energy Syst. Integr. 2020, 2, 261–272. [Google Scholar] [CrossRef]
- Kothandaraman Raghavan, A. PV Enabled Net-Zero EV Charging Station: System Design and Simulation Study. Master’s thesis, University of Waterloo, Waterloo, ON, Canada, 2018. [Google Scholar]
- Hussain, A.; Bui, V.H.; Kim, H.M. Optimal sizing of battery energy storage system in a fast EV charging station considering power outages. IEEE Trans. Transp. Electrif. 2020, 6, 453–463. [Google Scholar] [CrossRef]
- Das, I.; Dennis, J.E. Normal-boundary intersection: A new method for generating the Pareto surface in nonlinear multicriteria optimization problems. SIAM J. Optim. 1998, 8, 631–657. [Google Scholar] [CrossRef] [Green Version]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T.A.M.T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef] [Green Version]
- Srinivas, N.; Deb, K. Muiltiobjective optimization using nondominated sorting in genetic algorithms. Evol. Comput. 1994, 2, 221–248. [Google Scholar] [CrossRef]
- Apache NetBeans. Available online: https://netbeans.org/ (accessed on 1 November 2021).
- IBM. ILOG CPLEX V12.7 User’s Manual for CPLEX 2015; CPLEX Division, ILOG: Incline Village, NV, USA, 2015. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| EV ID(n) | Required Energy (kWh) | |||
|---|---|---|---|---|
| 1 | 26.2 | 17.4 | 18.4 | 7.4 |
| 2 | 12.5 | 28.7 | 29.7 | 18.7 |
| 3 | 17.6 | 20.2 | 21.2 | 18.2 |
| 4 | 62.6 | 0 | 7.7 | 1.7 |
| 5 | 23.8 | 0 | 21.6 | 12.6 |
| 6 | 11.4 | 0 | 0 | 17.9 |
| 7 | 54.8 | 0 | 6.5 | 3.5 |
| 8 | 34.2 | 0 | 24.6 | 7.6 |
| 9 | 57.6 | 13.2 | 14.2 | 3.2 |
| 10 | 23.5 | 0 | 29.6 | 14.6 |
| 11 | 49.9 | 23 | 24 | 11 |
| 12 | 30.6 | 20.9 | 21.9 | 13.9 |
| 13 | 17.2 | 0 | 0 | 17.3 |
| 14 | 7.1 | 0 | 27.3 | 18.3 |
| 15 | 10.5 | 0 | 0 | 18.9 |
| Case | WS Method | LEX Method | ||||
|---|---|---|---|---|---|---|
| W1 | W2 | W3 | P1 | P2 | P3 | |
| Case 1 | 5 | 1 | 9 | 1 | 1 | 1 |
| Case 2 | 9 | 5 | 1 | 2 | 3 | 1 |
| Case 3 | 5 | 9 | 1 | 2 | 1 | 3 |
| Case 4 | 9 | 1 | 1 | 3 | 2 | 1 |
| Case 5 | 1 | 1 | 1 | - | - | - |
| Run | w1 | w2 | w3 | β | Run | w1 | w2 | w3 | β |
|---|---|---|---|---|---|---|---|---|---|
| 1 | 0.1 | 0.1 | 0.8 | 0.003 | 9 | 0.3 | 0.4 | 0.3 | 0.148 |
| 2 | 0.1 | 0.2 | 0.7 | 0.038 | 20 | 0.3 | 0.5 | 0.2 | 0.140 |
| 3 | 0.1 | 0.3 | 0.6 | 0.055 | 21 | 0.3 | 0.6 | 0.1 | 0.131 |
| 4 | 0.1 | 0.4 | 0.5 | 0.048 | 22 | 0.4 | 0.1 | 0.5 | 0.119 |
| 5 | 0.1 | 0.5 | 0.4 | 0.041 | 23 | 0.4 | 0.2 | 0.4 | 0.111 |
| 6 | 0.1 | 0.6 | 0.3 | 0.033 | 24 | 0.4 | 0.3 | 0.3 | 0.102 |
| 7 | 0.1 | 0.7 | 0.2 | 0.055 | 25 | 0.4 | 0.4 | 0.2 | 0.094 |
| 8 | 0.1 | 0.8 | 0.1 | 0.058 | 26 | 0.4 | 0.5 | 0.1 | 0.086 |
| 9 | 0.2 | 0.1 | 0.7 | 0.068 | 27 | 0.5 | 0.1 | 0.4 | 0.065 |
| 10 | 0.2 | 0.2 | 0.6 | 0.103 | 28 | 0.5 | 0.2 | 0.3 | 0.057 |
| 11 | 0.2 | 0.3 | 0.5 | 0.138 | 29 | 0.5 | 0.3 | 0.2 | 0.048 |
| 12 | 0.2 | 0.4 | 0.4 | 0.133 | 30 | 0.5 | 0.4 | 0.1 | 0.040 |
| 13 | 0.2 | 0.5 | 0.3 | 0.126 | 31 | 0.6 | 0.1 | 0.3 | 0.011 |
| 14 | 0.2 | 0.6 | 0.2 | 0.119 | 32 | 0.6 | 0.2 | 0.2 | 0.003 |
| 15 | 0.2 | 0.7 | 0.1 | 0.120 | 33 | 0.6 | 0.3 | 0.1 | 0.002 |
| 16 | 0.3 | 0.1 | 0.6 | 0.133 | 34 | 0.7 | 0.1 | 0.2 | 0.096 |
| 17 | 0.3 | 0.2 | 0.5 | 0.165 | 35 | 0.7 | 0.2 | 0.1 | 0.088 |
| 18 | 0.3 | 0.3 | 0.4 | 0.157 | 36 | 0.8 | 0.1 | 0.1 | 0.100 |
| EV ID (n) | ||||
|---|---|---|---|---|
| 1 | 1 | 0 | 26.2 | 26.2 |
| 2 | 1 | 0 | 12.5 | 12.5 |
| 3 | 1 | 0 | 17.6 | 17.6 |
| 4 | 0 | 14.2 | 48.4 | 62.6 |
| 5 | 0 | 23.8 | 0 | 23.8 |
| 6 | 0 | 11.4 | 0 | 11.4 |
| 7 | 0 | 54.8 | 0 | 54.8 |
| 8 | 0 | 34.2 | 0 | 34.2 |
| 9 | 0 | 57.6 | 0 | 57.6 |
| 10 | 0 | 23.5 | 0 | 23.5 |
| 11 | 1 | 0 | 49.9 | 49.9 |
| 12 | 1 | 0 | 30.6 | 30.6 |
| 13 | 1 | 0 | 17.2 | 17.2 |
| 14 | 1 | 0 | 7.1 | 7.1 |
| 15 | 1 | 0 | 10.5 | 10.5 |
| Factor | WS | LEX | NBI | MM | NSGA-II |
|---|---|---|---|---|---|
| Max. EVs | 10 | 11 | 10 | 8 | 7 |
| Min. EVs | 8 | 7 | 8 | 8 | 7 |
| Variance | 0.64 | 2.188 | 0.627 | n/a | n/a |
| Additional constraints | 1 | I-1 | I | I | 0 |
| Computational complexity | Low | Medium | High | Medium | High |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hussain, A.; Kim, H.-M. Evaluation of Multi-Objective Optimization Techniques for Resilience Enhancement of Electric Vehicles. Electronics 2021, 10, 3030. https://doi.org/10.3390/electronics10233030
Hussain A, Kim H-M. Evaluation of Multi-Objective Optimization Techniques for Resilience Enhancement of Electric Vehicles. Electronics. 2021; 10(23):3030. https://doi.org/10.3390/electronics10233030
Chicago/Turabian StyleHussain, Akhtar, and Hak-Man Kim. 2021. "Evaluation of Multi-Objective Optimization Techniques for Resilience Enhancement of Electric Vehicles" Electronics 10, no. 23: 3030. https://doi.org/10.3390/electronics10233030
APA StyleHussain, A., & Kim, H.-M. (2021). Evaluation of Multi-Objective Optimization Techniques for Resilience Enhancement of Electric Vehicles. Electronics, 10(23), 3030. https://doi.org/10.3390/electronics10233030