
A Study on Re-Engagement and Stabilization Time on Take-Over Transition in a Highly Automated Driving System




Abstract
:1. Introduction
2. Methods
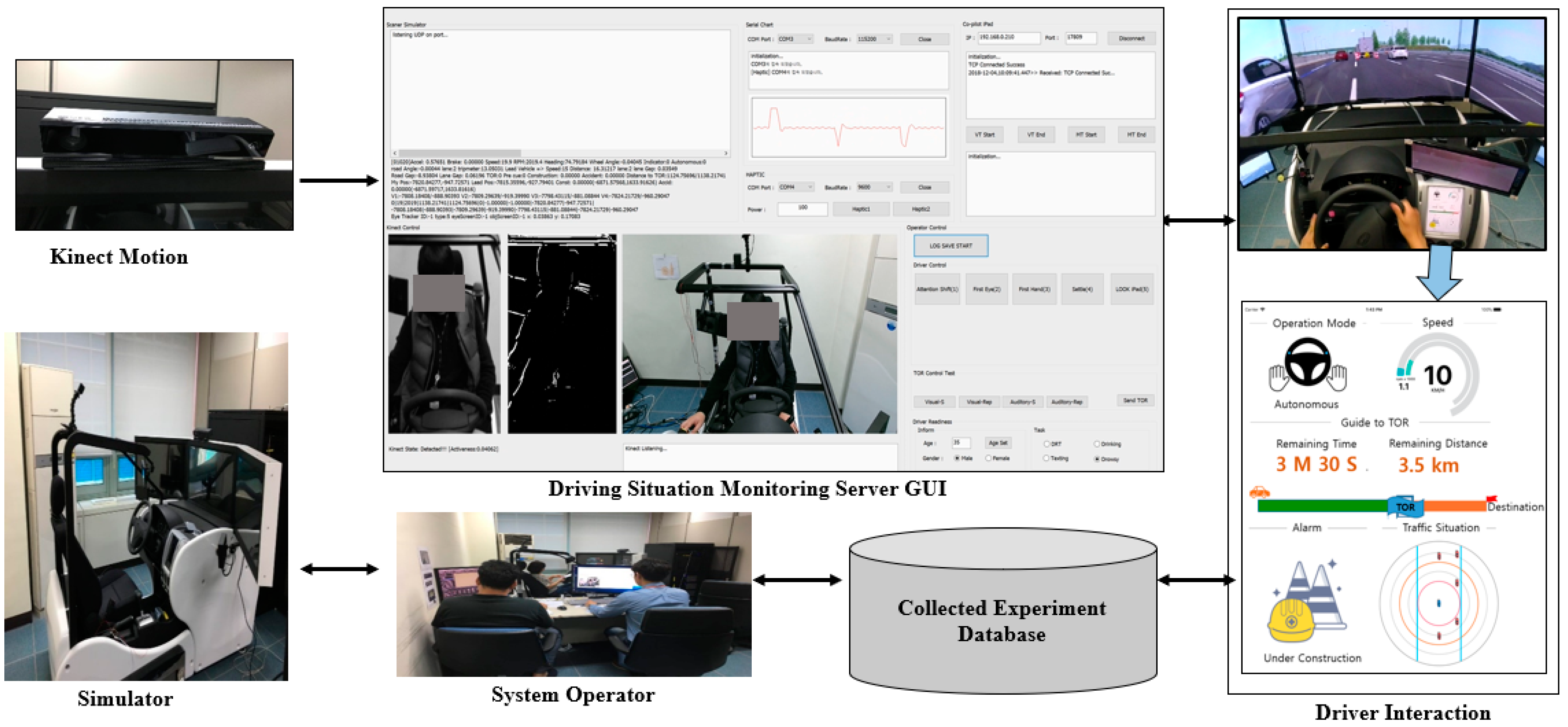
2.1. Experiment Environment
2.2. Participants and Acquisition Data
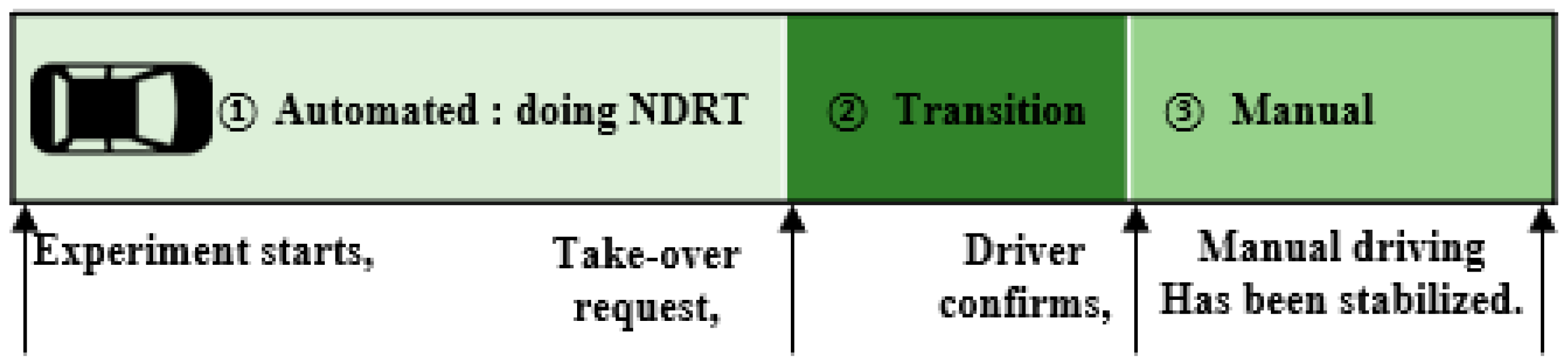
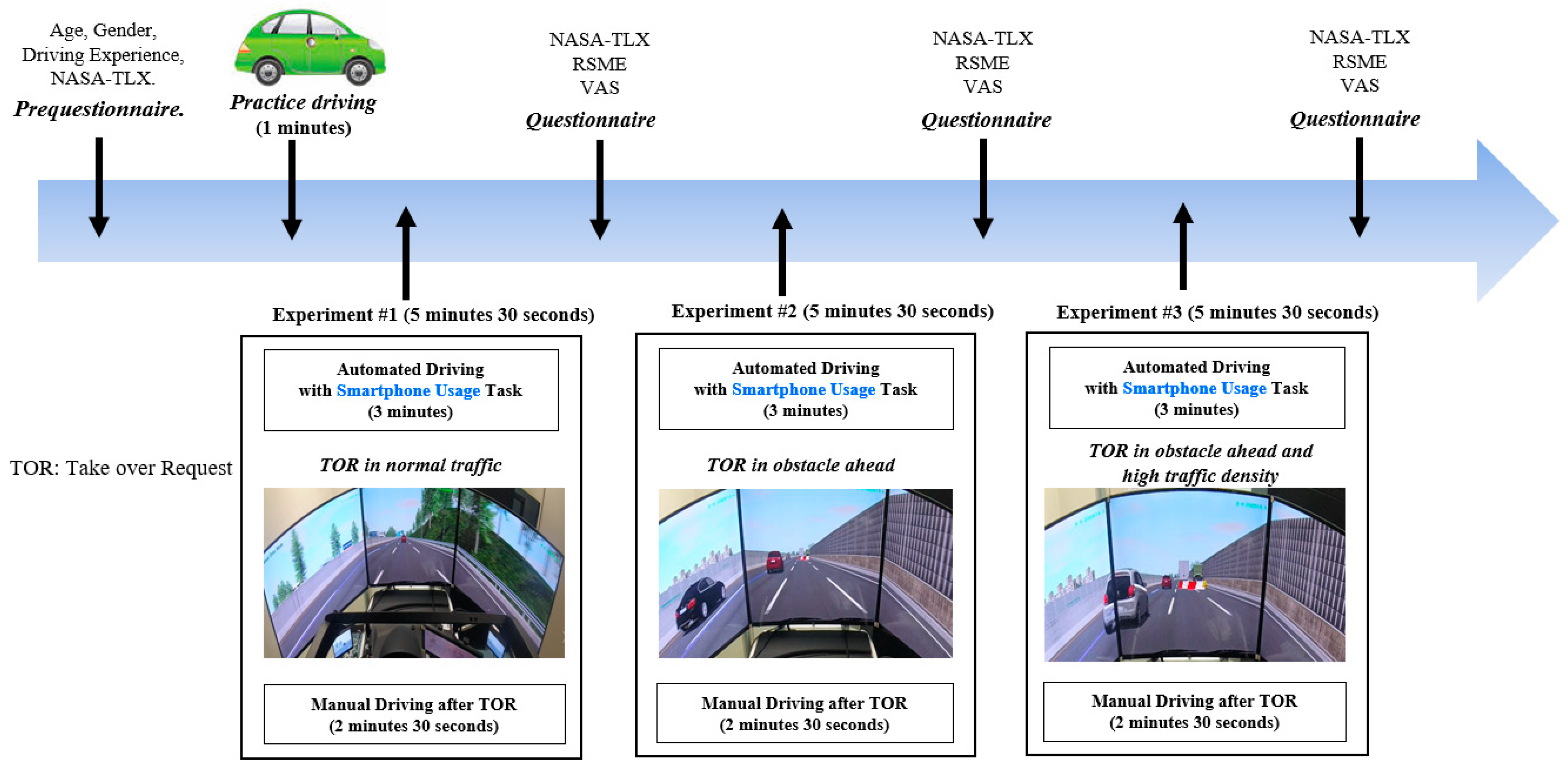
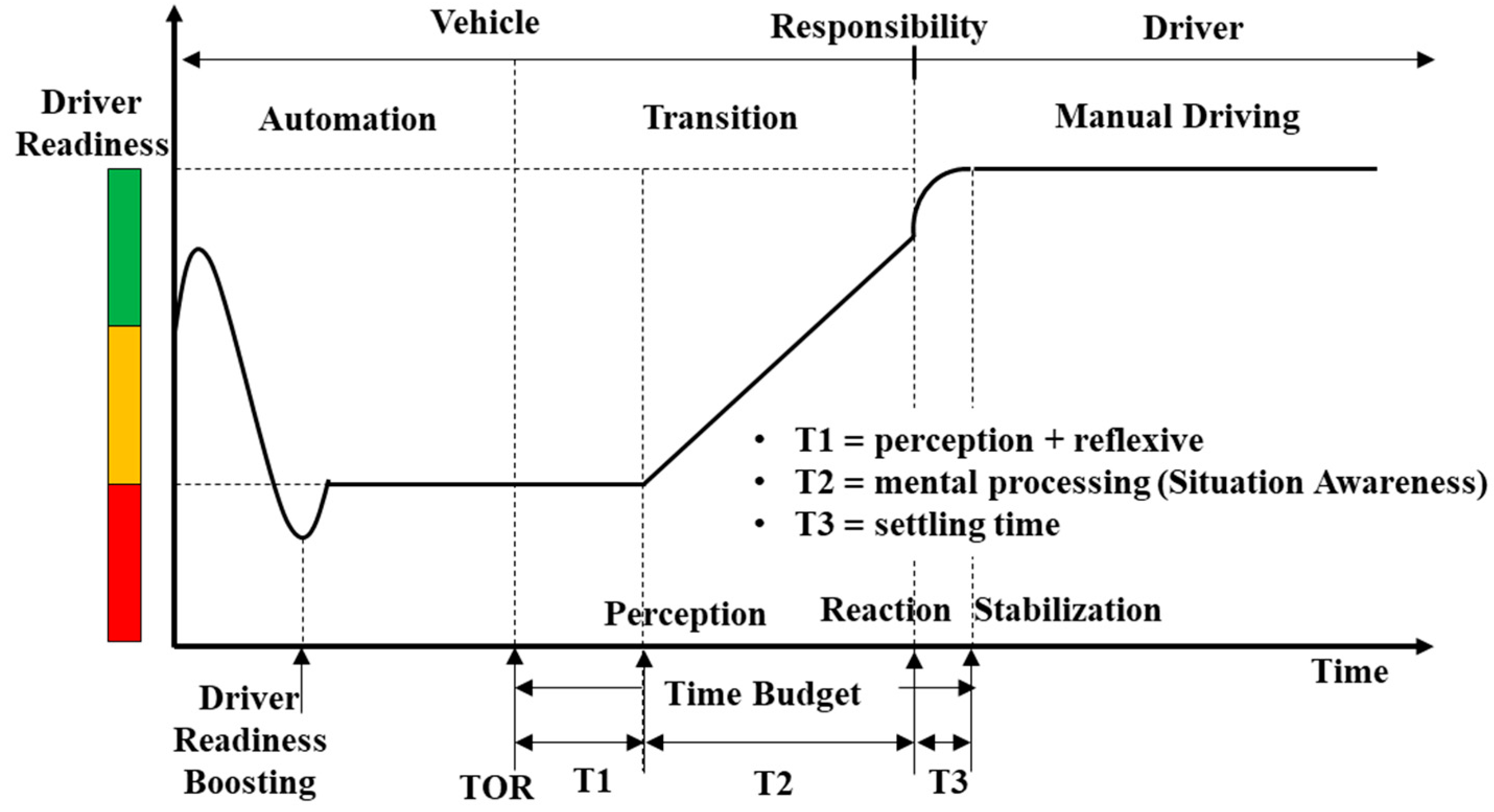
2.3. Experiment Procedure
2.4. Data Preprocessing
2.5. Classification and Regression Tree Method
3. Results
3.1. Statistical Analysis Results for Take-Over Transition Time
3.2. Classification Result for Re-Engagement Time
- Nodes 1 and 8: In experiments 2 and 3, compared with experiment 1, the percentage of drivers with good class re-engagement time for manual driving increased by 29.1% from 36.4% to 65.5%. This indicates that the proportion of participants with good response times increases, and there is a learning effect from the experiment. Therefore, it has been observed that the learning effect reduces response time, which means that level 3 autonomous drivers need education and training.
- Nodes 2–7: Among the participants in experiment 1, middle-aged drivers showed a 13.8% lower good class ratio than young-aged drivers. You can see that the reaction time varies according to age. There was no significant difference in the good class ratio between female drivers and male drivers in experiment 1.
- Nodes 9 and 16: Among the participants in experiment 2, middle-aged drivers showed a 20.7% lower good class ratio than young-aged drivers, showing that the reaction time varies with age.
- Nodes 10–15: For middle-aged drivers, the good class ratio increased by 13.1% in experiment 3 compared with experiment 2. Since the experiment was repeated, the time to start manual operation became faster. In experiment 2, female drivers had a 13% lower good class ratio than male drivers, but in experiment 3, it was 4.1% lower. It can be seen that with repeated experiments, middle-aged female drivers also engaged in manual driving more rapidly, which means that level 3 autonomous drivers benefit from education and training.
- Nodes 17–20: Young-aged female drivers had a 15.1% lower good class ratio than male drivers. Likewise, the good class rate in experiment 3 increased by 5% compared with experiment 2, so the more times the experiment was repeated, the faster was the reaction time to start manual operation.
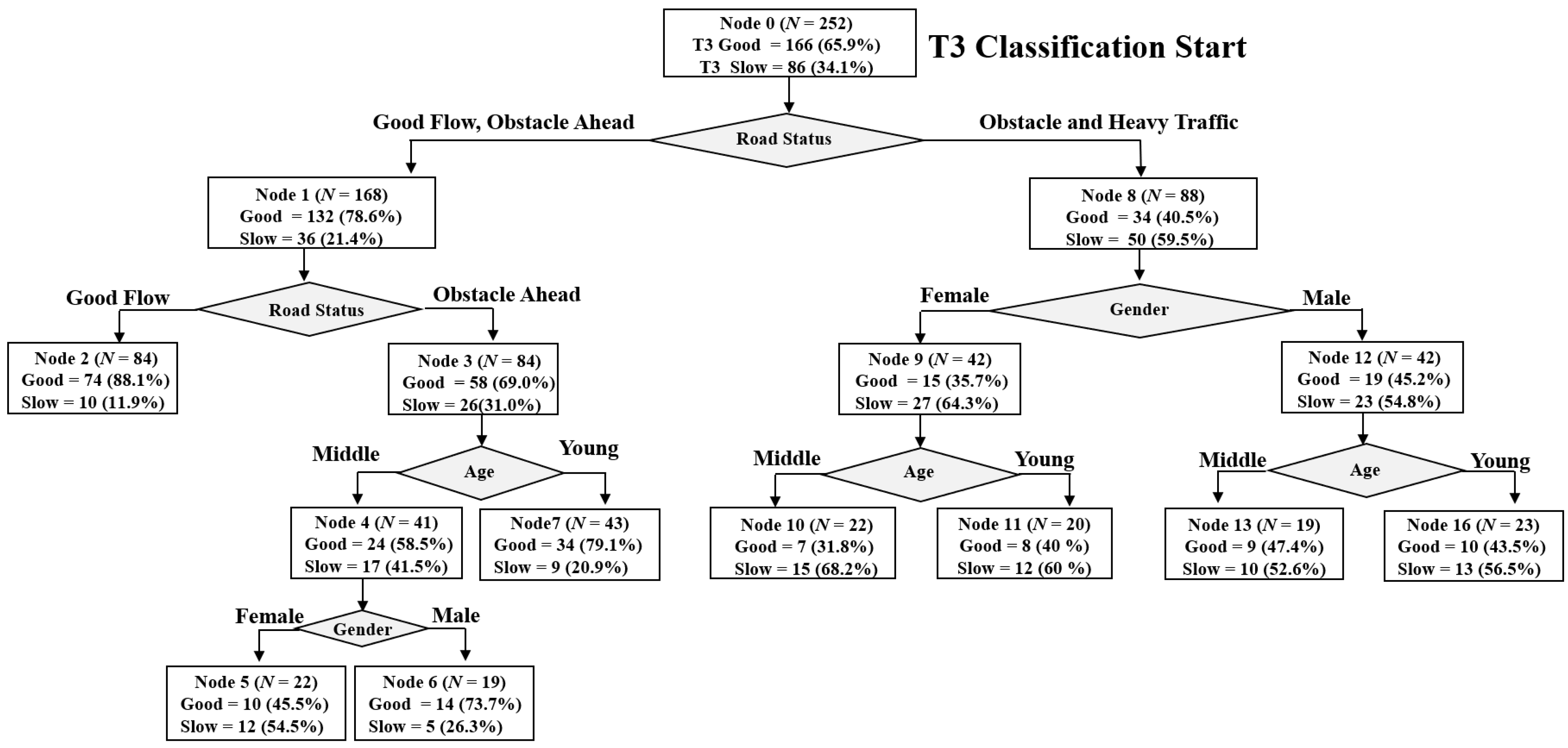
3.3. Classification Results for Stabilization Time
- Nodes 1 and 8: For the stabilization time class of manual operation, nodes were branched according to the status of the road ahead and traffic conditions in the surrounding lanes. If there is an obstacle or vehicle in front of you due to an accident, you must avoid it and change lanes. The good class ratio in node 1 was 78.6% and the good class ratio in node 8 was 40.5%. Therefore, the good class ratio in the case of heavy traffic from obstacles and in surrounding lanes was 40.5%, which was 38.1% lower than that of 78.6% which was not.
- Nodes 2 and 3: After transition to manual driving, it can be seen that 88.1% of the driver’s stabilization time was seen quickly when the road in front had a good flow. However, when there was an obstacle in front, it can be seen that a situation in which lane change was required occurred, and the class with good stabilization time was reduced to 69%. Through this, it can be judged that the control authority transition should be planned in consideration of the state of inactivity of the surrounding roads.
- Nodes 4–7: Middle-aged drivers have a 20.6% lower percentage of good class compared with young drivers among the participants, indicating that the stabilization time varies with age. In particular, middle-aged female drivers showed a 28.2% greater difference in good class percentage than male drivers. Therefore, the stabilization time may vary depending on the age and gender characteristics, so it is important to be able to take these human factor characteristics into account in the control transition notification.
- Nodes 9–16: When there was an obstacle in front of the driver after regaining control and the traffic density of the surrounding road was high, a large proportion of classes experienced a slow stabilization time. We found that female drivers need more stabilization time than male drivers, and middle-aged female drivers in particular need more stabilization time.
3.4. Statistical Analysis Results for Workload, Fatigue, and Effort
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Park, M.; Lee, S.; Han, W. Development of Steering Control System for Autonomous Vehicle Using Geometry-Based Path Tracking Algorithm. ETRI J. 2015, 37, 617–625. [Google Scholar] [CrossRef]
- Noh, S.; Park, B.; An, K.; Koo, Y.; Han, W. Co-Pilot Agent for Vehicle/Driver Cooperative and Autonomous Driving. ETRI J. 2015, 37, 1032–1043. [Google Scholar] [CrossRef]
- Asljung, D.; Nilsson, J.; Fredriksson, J. Using Extreme Value Theory for Vehicle Level Safety Validation and Implications for Autonomous Vehicles. IEEE Trans. Intell. Veh. 2017, 2, 288–297. [Google Scholar] [CrossRef]
- Kuutti, S.; Fallah, S.; Katsaros, K.; Dianati, M.; McCullough, F.; Mouzakitis, A. A Survey of the State-of-the-Art Localization Techniques and Their Potentials for Autonomous Vehicle Applications. IEEE Internet Things J. 2018, 5, 829–846. [Google Scholar] [CrossRef]
- Marzbani, H.; Khayyam, H.; To, C.N.; Quoc, D.V.; Jazar, R.N. Autonomous Vehicles: Autodriver Algorithm and Vehicle Dynamics. IEEE Trans. Veh. Technol. 2019, 68, 3201–3211. [Google Scholar] [CrossRef]
- NHTSA. Available online: https://www.nhtsa.gov/technology-innovation/automated-vehicles-safety#topic-road-self-driving (accessed on 18 January 2021).
- SAE J3016. Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles; SAE: Warrendale, PA, USA, 2016. [Google Scholar]
- Morales-Alvarez, W.; Sipele, O.; Léberon, R.; Tadjine, H.H.; Olaverri-Monreal, C. Automated Driving: A Literature Review of the Take over Request in Conditional Automation. Electronics 2020, 9, 2087. [Google Scholar] [CrossRef]
- ISO/PDTR 21959; ISO TC 22/SC 139/WG 8. Road Vehicles: Human Performance and State in the Context 8 of Automated Driving: Part 1—Terms and Definitions; ISO: Geneva, Switzerland, 2018. [Google Scholar]
- Kim, H.; Kim, W.; Kim, J.; Lee, S.-J.; Yoon, D. A study on the effects of providing situation awareness information for the control authority transition of automated vehicle. In Proceedings of the 2019 International Conference on Information and Communication Technology Convergence (ICTC), Jeju Island, Korea, 16–18 October 2019; pp. 1394–1396. [Google Scholar]
- Cunninghama, M.; Regana, M.A. Autonomous vehicles: Human factors issues and future research. In Proceedings of the 2015 Australasian Road Safety Conference, Gold Coast, Queensland, Australia, 1 September 2015. [Google Scholar]
- Radlmayr, J.; Gold, C.; Lorenz, L.; Farid, M.; Bengler, K. How traffic situations and non-driving related tasks affect the take-over quality in highly automated driving. In Proceedings of the Human Factors and Ergonomics Society Annual Meeting; SAGE Publications: Sauzend Oaks, CA, USA, 2014; Volume 58, pp. 2063–2067. [Google Scholar]
- Gold, C.; Körber, M.; Lechner, D.; Bengler, K. Taking over control from highly automated vehicles in complex traffic situations: The role of traffic density. Hum. Factors 2016, 58, 642–652. [Google Scholar] [CrossRef] [PubMed]
- Körber, M.; Gold, C.; Lechner, D.; Bengler, K. The influence of age on the take-over of vehicle control in highly automated driving. Transp. Res. Part. F Traffic Psychol. Behav. 2016, 39, 19–32. [Google Scholar] [CrossRef] [Green Version]
- Eriksson, A.; Stanton, N.A. Takeover time in highly automated vehicles: Noncritical transitions to and from manual control. Hum. Factors 2017, 59, 689–705. [Google Scholar] [CrossRef] [PubMed]
- Kim, J.; Kim, H.-S.; Kim, W.; Yoon, D. Take-over performance analysis depending on the drivers’ non-driving secondary tasks in automated vehicles. In Proceedings of the 2018 International Conference on Information and Communication Technology Convergence (ICTC), Jeju, Korea, 17–19 October 2018; pp. 1364–1366. [Google Scholar]
- Naujoks, F.; Mai, C.; Neukum, A. The Effect of Urgency of Take-Over Requests during Highly Automated Driving under Distraction Conditions. Available online: https://www.researchgate.net/publication/264734018_The_Effect_of_Urgency_of_Take-Over_Requests_During_Highly_Automated_Driving_Under_Distraction_Conditions/link/53edf17a0cf23733e80b1b47/download (accessed on 31 January 2021).
- Kim, W.; Kim, J.; Kim, H.-S.; Lee, S.-J.; Yoon, D. A Study on the Driver’s Response Performance according to Modality of Planned TOR in Automated Driving. In Proceedings of the 2019 International Conference on Information and Communication Technology Convergence (ICTC), Jeju Island, Korea, 16–18 October 2019; pp. 1471–1473. [Google Scholar]
- Rao, V. Introduction to Classification & Regression Trees (CART). Available online: https://www.datasciencecentral.com/profiles/blogs/introduction-to-classification-regression-trees-cart (accessed on 30 November 2020).
- Zimmerman, R.K.; Balasubramani, G.K.; Nowalk, M.P.; Eng, H.F.; Urbanski, L.; Jackson, M.L.; Jackson, L.A.; McLean, H.Q.; Belongia, E.A.; Monto, A.S.; et al. Classification and Regression Tree (CART) analysis to predict influenza in primary care patients. BMC Infect. Dis. 2016, 16, 503. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Han, J.; Kamber, M.; Pei, J. Decision tree induction. In Data Mining: Concepts and Techniques, 3rd ed.; Elsevier: Amsterdam, The Netherlands, 2012; pp. 330–349. [Google Scholar]
- Federal Highway Research Institute (BASt). Explanation of 5.6.1.4 Transition demand and system operation during transition. In Informal Document—ACSF-05-07; Federal Highway Research Institute: Bergisch Gladbach, Germany, 2016. [Google Scholar]
- Aoki, M.; Fujii, H. Inter-vehicle communication: Technical issues on vehicle control application. IEEE Commun. Mag. 1996, 34, 90–93. [Google Scholar] [CrossRef]
- Noor-A-Rahim, M.; Liu, Z.; Lee, H.; Omar Khyam, M.; He, J.; Pesch, D.; Moessner, K.; Saad, W.; Vincent Poor, H. 6G for Vehicle-to-Everything (V2X) communications: Enabling technologies, challenges, and opportunities. arXiv 2020, arXiv:2012.07753. Available online: https://arxiv.org/abs/2012.07753 (accessed on 18 January 2021).
- Technology Associates. Available online: http://www.technology-assoc.com/articles/reaction-time.html (accessed on 18 January 2021).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Predicted Class | |||
|---|---|---|---|
| Positive | Negative | ||
| Actual Class | Positive | TP (True Positive) | FN (False Negative) |
| Negative | FP (False Positive) | TN (True Negative) | |
| Trial No. | N | T1T2 (Re-Engagement Time) | T3 (Stabilization Time) | ||
|---|---|---|---|---|---|
| Mean | SD 1 | Mean | SD | ||
| Experiment 1 | 84 | 4.74 | 1.41 | 11.54 | 10.31 |
| Experiment 2 | 84 | 4.29 | 1.39 | 22.65 | 12.05 |
| Experiment 3 | 84 | 3.71 | 1.09 | 28.55 | 13.74 |
| All experiments | 252 | 4.25 | 1.36 | 20.92 | 13.47 |
| Predicted Class | |||
|---|---|---|---|
| T1T2_Good | T1T2_Slow | ||
| Actual Class | T1T2_Good | 110 (76.39%) | 34 (23.61%) |
| T1T2_Slow | 56 (51.85%) | 52 (48.15%) | |
| Predicted Class | |||
|---|---|---|---|
| T3_Good | T3_Slow | ||
| Actual Class | T3_Good | 122 (73.49%) | 44 (26.51%) |
| T3_Slow | 24 (27.91%) | 62 (72.09%) | |
| Trial No. | N | NASA TLX Score | RSME Score | VAS (%) | |||
|---|---|---|---|---|---|---|---|
| Mean | SD | Mean | SD | Mean | SD | ||
| Experiment 1 | 84 | 26.2 | 5.12 | 20.5 | 19.62 | 61.2 | 33.92 |
| Experiment 2 | 84 | 27.9 | 5.28 | 21.0 | 19.07 | 67.4 | 36.24 |
| Experiment 3 | 84 | 35.9 | 5.99 | 29.1 | 25.54 | 74.4 | 37.88 |
| ANOVA Results | F = 5.55, p = 0.004 | F = 2.83, p = 0.061 | F = 4.16, p = 0.016 | ||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, H.; Kim, W.; Kim, J.; Lee, S.-J.; Yoon, D.; Jo, J. A Study on Re-Engagement and Stabilization Time on Take-Over Transition in a Highly Automated Driving System. Electronics 2021, 10, 344. https://doi.org/10.3390/electronics10030344
Kim H, Kim W, Kim J, Lee S-J, Yoon D, Jo J. A Study on Re-Engagement and Stabilization Time on Take-Over Transition in a Highly Automated Driving System. Electronics. 2021; 10(3):344. https://doi.org/10.3390/electronics10030344
Chicago/Turabian StyleKim, Hyunsuk, Woojin Kim, Jungsook Kim, Seung-Jun Lee, Daesub Yoon, and Junghee Jo. 2021. "A Study on Re-Engagement and Stabilization Time on Take-Over Transition in a Highly Automated Driving System" Electronics 10, no. 3: 344. https://doi.org/10.3390/electronics10030344
APA StyleKim, H., Kim, W., Kim, J., Lee, S. -J., Yoon, D., & Jo, J. (2021). A Study on Re-Engagement and Stabilization Time on Take-Over Transition in a Highly Automated Driving System. Electronics, 10(3), 344. https://doi.org/10.3390/electronics10030344