
Performance Enhancement Scheme for RSE-Based Underwater Optical Camera Communication Using De-Bubble Algorithm and Binary Fringe Correction





Abstract
:1. Introduction
2. Theory
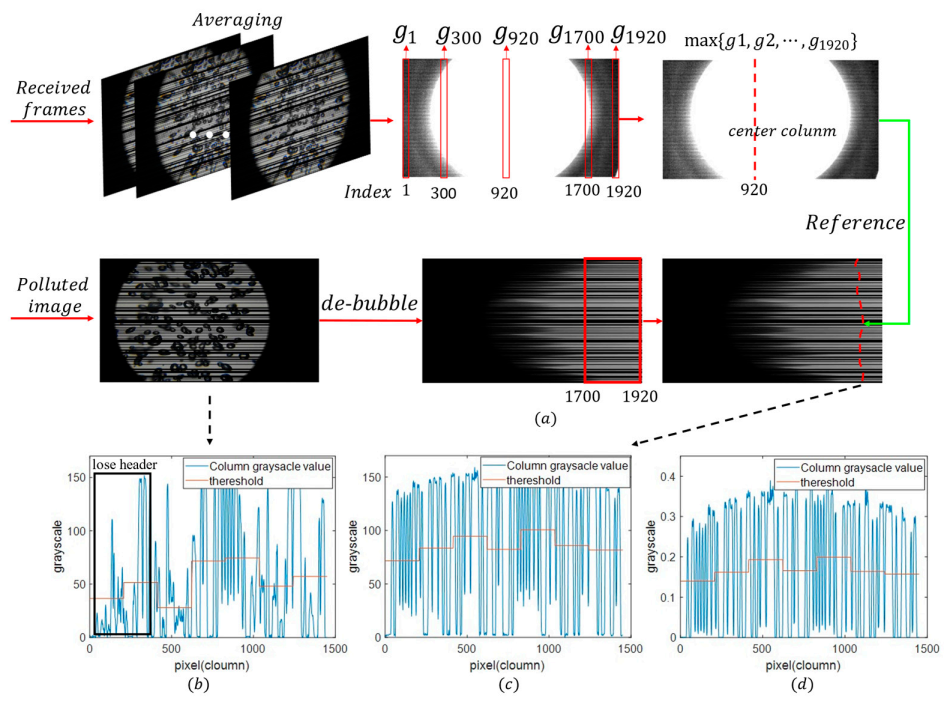
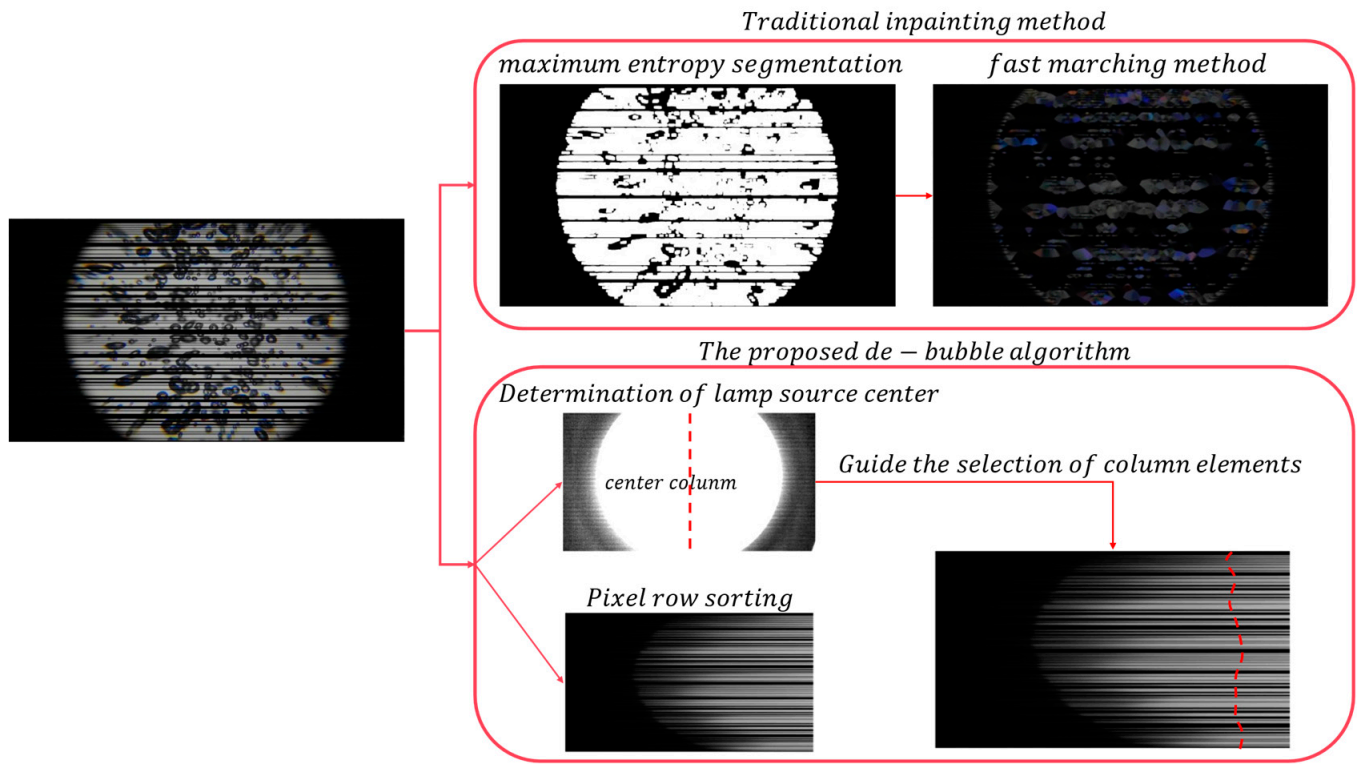
2.1. Underwater De-Bubble Algorithm
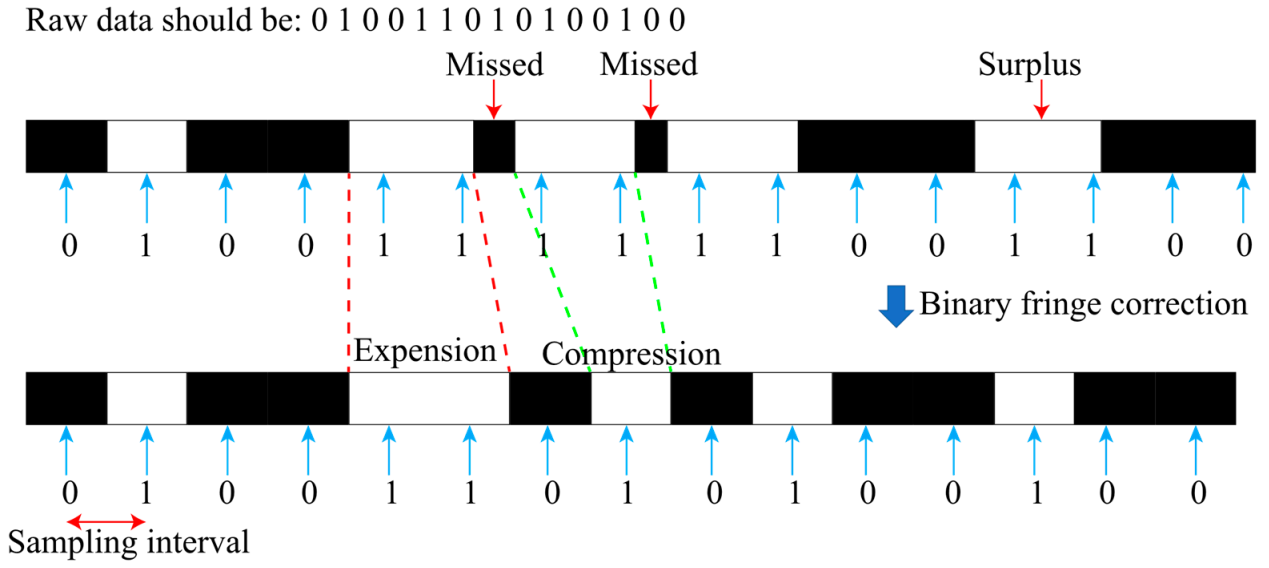
2.2. Sampling Scheme Based on Binary Fringe Correction (BFC)
3. Experimental Section
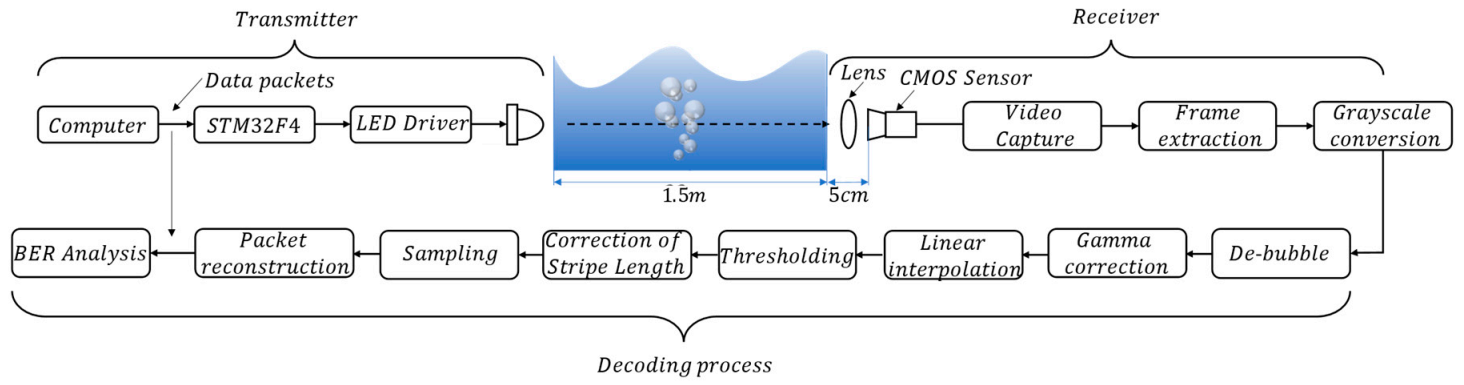
3.1. Methodology
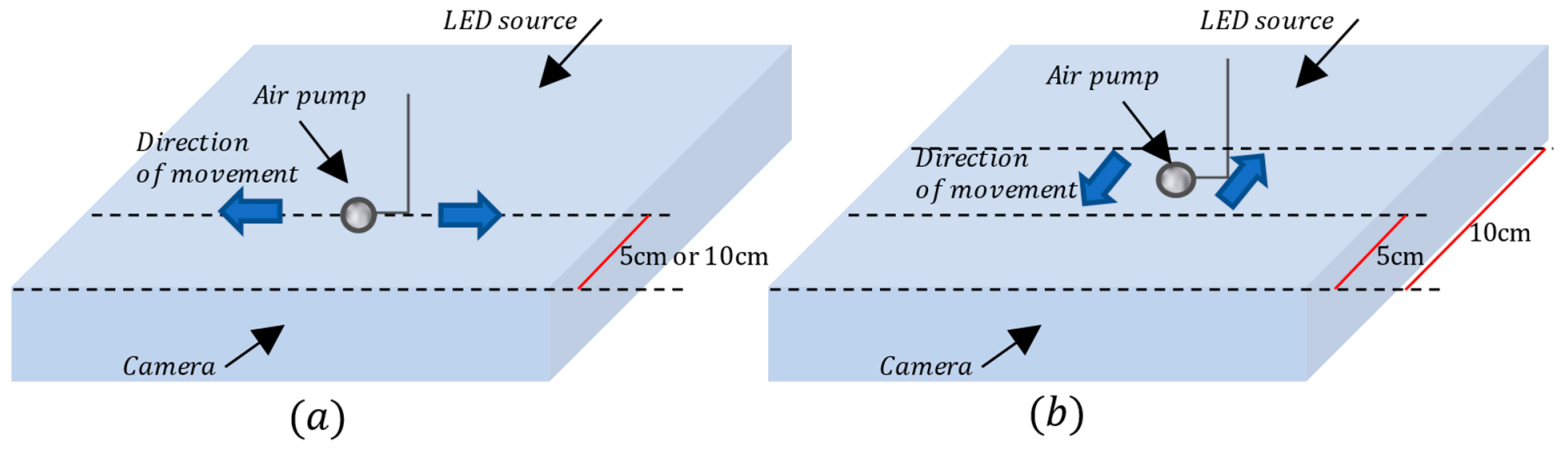
3.2. Experimental Setup
3.3. Analysis of Bubble Effect on UOCC Link
3.3.1. Influence Analysis of Bubble Density on Different Data
3.3.2. Influence Analysis of Different Bubble Size
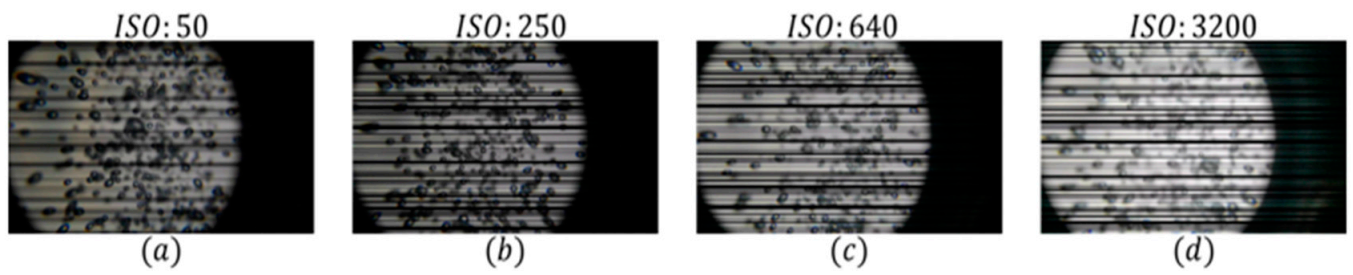
3.3.3. State Analysis of Bubbles in Different ISOs
3.4. Effect and Efficiency Analysis of De-Bubble Algorithm
3.5. Comprehensive Performance Analysis of UOCC System
3.5.1. Performance Analysis When the Air Pump Is Stationary
3.5.2. Performance Analysis When Air Pump Is Moving
3.5.3. Performance Analysis under Different Water Environments
3.5.4. Comparison of Rate and Distance between Different Systems
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Chitre, M.; Shahabudeen, S.; Freitag, L.; Stojanovic, M. Recent advances in underwater acoustic communications & networking. In Proceedings of the OCEANS, Quebec City, QC, Canada, 15–18 September 2008; pp. 1–10. [Google Scholar]
- Liu, W.; Xu, Z. Some practical constraints and solutions for optical camera communication. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2020, 378, 20190191. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Moreno, D.; Rufo, J.; Guerra, V.; Rabadan, J.; Perez-Jimenez, R. Effect of temperature on channel compensation in op-tical camera communication. Electronics 2021, 10, 262. [Google Scholar] [CrossRef]
- Akram, M.; Godaliyadda, R.; Ekanayake, P. Design and analysis of an optical camera communication system for un-derwater applications. IET Optoelectron. 2019, 14, 10–21. [Google Scholar] [CrossRef]
- Akram, M.; Aravinda, L.; Munaweera, M.; Godaliyadda, G.; Ekanayake, M. Camera based visible light communication system for underwater applications. In Proceedings of the 2017 IEEE International Conference on Industrial and Information Systems (ICIIS), Peradeniya, Sri Lanka, 15–16 December 2017; pp. 1–6. [Google Scholar]
- Chow, C.-W.; Chen, C.-Y.; Chen, S.-H. Enhancement of Signal Performance in LED Visible Light Communications Using Mobile Phone Camera. IEEE Photon. J. 2015, 7, 1–7. [Google Scholar] [CrossRef]
- Nguyen, T.; Hong, C.H.; Le, N.T.; Jang, Y.M. High-speed asynchronous Optical Camera Communication using LED and rolling shutter camera. In Proceedings of the 2015 Seventh International Conference on Ubiquitous and Future Networks, Sapporo, Japan, 7–10 July 2015; pp. 214–219. [Google Scholar]
- Kim, B.W.; Yoo, J.-H.; Jung, S.-Y. Design of Streaming Data Transmission Using Rolling Shutter Camera-Based Optical Camera Communications. Electronics 2020, 9, 1561. [Google Scholar] [CrossRef]
- Ji, P.; Tsai, H.-M.; Wang, C.; Liu, F. Vehicular Visible Light Communications with LED Taillight and Rolling Shutter Camera. In Proceedings of the 2014 IEEE 79th Vehicular Technology Conference (VTC Spring), Seoul, Korea, 18–21 May 2014; pp. 1–6. [Google Scholar]
- Liu, Y.; Liang, K.; Chen, H.-Y.; Wei, L.-Y.; Hsu, C.-W.; Chow, C.-W.; Yeh, C.-H. Light Encryption Scheme Using Light-Emitting Diode and Camera Image Sensor. IEEE Photon. J. 2016, 8, 1–7. [Google Scholar] [CrossRef]
- Chow, C.-W.; Liu, Y.-C.; Shiu, R.-J.; Yeh, C.-H. Adaptive Thresholding Scheme for Demodulation of Rolling-Shutter Images Obtained in CMOS Image Sensor Based Visible Light Communications. IEEE Photon. J. 2018, 10, 1–6. [Google Scholar] [CrossRef]
- Jamali, M.V.; Khorramshahi, P.; Tashakori, A.; Chizari, A.; Shahsavari, S.; AbdollahRamezani, S.; Salehi, J.A. Statis-tical distribution of intensity fluctuations for underwater wireless optical channels in the presence of air bubbles. In Proceedings of the 2016 Iran Workshop on Communication and Information Theory (IWCIT), Tehran, Iran, 3–4 May 2016; pp. 1–6. [Google Scholar]
- Davis, G.E. Scattering of Light by an Air Bubble in Water. J. Opt. Soc. Am. 1955, 45, 572–581. [Google Scholar] [CrossRef]
- Hagem, R.M.; Thiel, D.V.; O’Keefe, S.G.; Fickenscher, T. The effect of air bubbles on an underwater optical communica-tions system for wireless sensor network applications. Microw. Opt. Technol. Lett. 2012, 54, 729–732. [Google Scholar] [CrossRef]
- Zedini, E.; Oubei, H.M.; Kammoun, A.; Hamdi, M.; Ooi, B.S.; Alouini, M.-S. A New Simple Model for Underwater Wireless Optical Channels in the Presence of Air Bubbles. In Proceedings of the GLOBECOM 2017—2017 IEEE Global Communications Conference, Singapore, 4–8 December 2017; pp. 1–6. [Google Scholar]
- Chen, D.; Wang, J.; Li, S.; Xu, Z. Effects of air bubbles on underwater optical wireless communication [Invited]. Chin. Opt. Lett. 2019, 17, 100008. [Google Scholar] [CrossRef]
- Zhao, Y.; Wang, A.; Zhu, L.; Lv, W.; Xu, J.; Wang, J. Demonstration of underwater wireless optical communication using directly modulated green laser and different modes subjected to bubbles. In Proceedings of the 2017 Opto-Electronics and Communications Conference (OECC) and Photonics Global Conference (PGC), Singapore, 31 July–4 August 2017; pp. 1–2. [Google Scholar]
- Oubei, H.M.; Elafandy, R.T.; Park, K.-H.; Ng, T.K.; Alouini, M.-S.; Ooi, B.S. Performance evaluation of underwater wireless optical communications links in the presence of different air bubble populations. In Proceedings of the 2017 IEEE Photonics Conference (IPC), Orlando, FL, USA, 1–5 October 2017; Volume 9, pp. 441–448. [Google Scholar] [CrossRef] [Green Version]
- Chow, C.-W.; Chen, C.-Y.; Chen, S.-H. Visible light communication using mobile-phone camera with data rate higher than frame rate. Opt. Express 2015, 23, 26080–26085. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Z.; Zhang, T.; Zhou, J.; Qiao, Y.; Yang, A.; Lu, Y. Performance Enhancement Scheme for Mobile-Phone Based VLC Using Moving Exponent Average Algorithm. IEEE Photon. J. 2017, 9, 1–7. [Google Scholar] [CrossRef]
- Liu, Y.; Chow, C.-W.; Liang, K.; Chen, H.-Y.; Hsu, C.-W.; Chen, C.-Y.; Chen, S.-H. Comparison of thresholding schemes for visible light communication using mobile-phone image sensor. Opt. Express 2016, 24, 1973–1978. [Google Scholar] [CrossRef] [PubMed]
- Shi, J.; He, J.; Deng, R.; Wei, Y.; Long, F.; Cheng, Y.; Chen, L. Multilevel modulation scheme using the overlapping of two light sources for visible light communication with mobile phone camera. Opt. Express 2017, 25, 15905. [Google Scholar] [CrossRef] [PubMed]
- Liang, K.; Chow, C.-W.; Liu, Y.; Yeh, C.-H. Thresholding schemes for visible light communications with CMOS camera using entropy-based algorithms. Opt. Express 2016, 24, 25641–25646. [Google Scholar] [CrossRef] [PubMed]
- Chen, C.-W.; Chow, C.-W.; Liu, Y.; Yeh, C.-H. Efficient demodulation scheme for rolling-shutter-patterning of CMOS image sensor based visible light communications. Opt. Express 2017, 25, 24362–24367. [Google Scholar] [CrossRef] [PubMed]
- Le, N.-T.; Nguyen, T.; Jang, Y.M. Frequency shift on-off keying for optical camera communication. In Proceedings of the 2014 Sixth International Conference on Ubiquitous and Future Networks (ICUFN), Shanghai, China, 8–11 July 2014; pp. 22–25. [Google Scholar]
- Rufo, J.; Delgado, F.; Quintana, C.; Perera, A.; Rabadan, J.; Perez-Jimenez, R. Visible light communication systems for optical video transmission. Microw. Opt. Technol. Lett. 2010, 52, 1572–1576. [Google Scholar] [CrossRef]
- Telea, A.A. An Image Inpainting Technique Based on the Fast Marching Method. J. Graph. Tools 2004, 9, 23–34. [Google Scholar] [CrossRef]
- Kapur, J.N.; Sahoo, P.K.; Wong, A.K. A new method for gray-level picture thresholding using the entropy of the histo-gram. Comput. Vis. Graph. Image Process. 1985, 29, 273–285. [Google Scholar] [CrossRef]
- Wang, W.C.; Chow, C.W.; Chen, C.W.; Hsieh, H.C.; Chen, Y.T. Beacon jointed packet reconstruction scheme for mo-bile-phone based visible light communications using rolling shutter. IEEE Photon. J. 2017, 9, 1–6. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| The focal length of lens/mm | 49 mm |
| The resolution of the camera | 1920 × 1080 |
| The ISO of the camera | 250 |
| Frame rate/fps | 60 |
| Exposure compensation/EV | −4 |
| Exposure time/μs | 250 |
| The diameter of the LED downlight/cm | 10.5 |
| The power of the LED downlight/W | 9 |
| Voltage of the LED/V | 26 |
| Current of the LED/mA | 130 |
| Environment | Bubble Type | |||
|---|---|---|---|---|
| Density | Distance from Camera /(cm) | Position in Image | Moving (Manually) | |
| Tap water (25 °C) | Dense | 10 | Center | – |
| Sparse | 10 | Center | – | |
| Dense | 5 | Center | – | |
| Sparse | 5 | Center | – | |
| Dense | 10 to 5 | Center | √ | |
| Dense | 5 | Moving from left to right | √ | |
| Dense | 10 | Moving from left to right | √ | |
| Saline water (25 °C) (Salinity: 30%) | Dense | 10 | Center | – |
| Sparse | 10 | Center | – | |
| Dense | 5 | Center | – | |
| Sparse | 5 | Center | – | |
| Dense | 10 to 5 | Center | √ | |
| Dense | 5 | Moving from left to right | √ | |
| Dense | 10 | Moving from left to right | √ | |
| Bubble Type (Density, ) | Water Type at Normal Temperature (25 °C) | Data Rate (Kbit/s) | ||||
|---|---|---|---|---|---|---|
| 3.6 (BER) | 4.8 (BER) | 6 (BER) | 7.2 (BER) | 8.4 (BER) | ||
| (Dense, 10) | Clear tap water | |||||
| (Dense, 10) | Saline water (Salinity: 30%) | |||||
| (Sparse, 10) | Clear tap water | |||||
| (Sparse, 10) | Saline water (Salinity: 30%) | |||||
| (Dense, 5) | Clear tap water | |||||
| (Dense, 5) | Saline water (Salinity: 30%) | |||||
| (Sparse, 5) | Clear tap water | |||||
| (Sparse, 5) | Saline water (Salinity: 30%) | |||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, Z.; Wen, S.; Li, Y.; Xu, W.; Chen, Z.; Guan, W. Performance Enhancement Scheme for RSE-Based Underwater Optical Camera Communication Using De-Bubble Algorithm and Binary Fringe Correction. Electronics 2021, 10, 950. https://doi.org/10.3390/electronics10080950
Zhou Z, Wen S, Li Y, Xu W, Chen Z, Guan W. Performance Enhancement Scheme for RSE-Based Underwater Optical Camera Communication Using De-Bubble Algorithm and Binary Fringe Correction. Electronics. 2021; 10(8):950. https://doi.org/10.3390/electronics10080950
Chicago/Turabian StyleZhou, Zihao, Shangsheng Wen, Yue Li, Wenxi Xu, Zhijian Chen, and Weipeng Guan. 2021. "Performance Enhancement Scheme for RSE-Based Underwater Optical Camera Communication Using De-Bubble Algorithm and Binary Fringe Correction" Electronics 10, no. 8: 950. https://doi.org/10.3390/electronics10080950
APA StyleZhou, Z., Wen, S., Li, Y., Xu, W., Chen, Z., & Guan, W. (2021). Performance Enhancement Scheme for RSE-Based Underwater Optical Camera Communication Using De-Bubble Algorithm and Binary Fringe Correction. Electronics, 10(8), 950. https://doi.org/10.3390/electronics10080950