
An Improved Supervoxel Clustering Algorithm of 3D Point Clouds for the Localization of Industrial Robots

 ,
,
Abstract
:1. Introduction
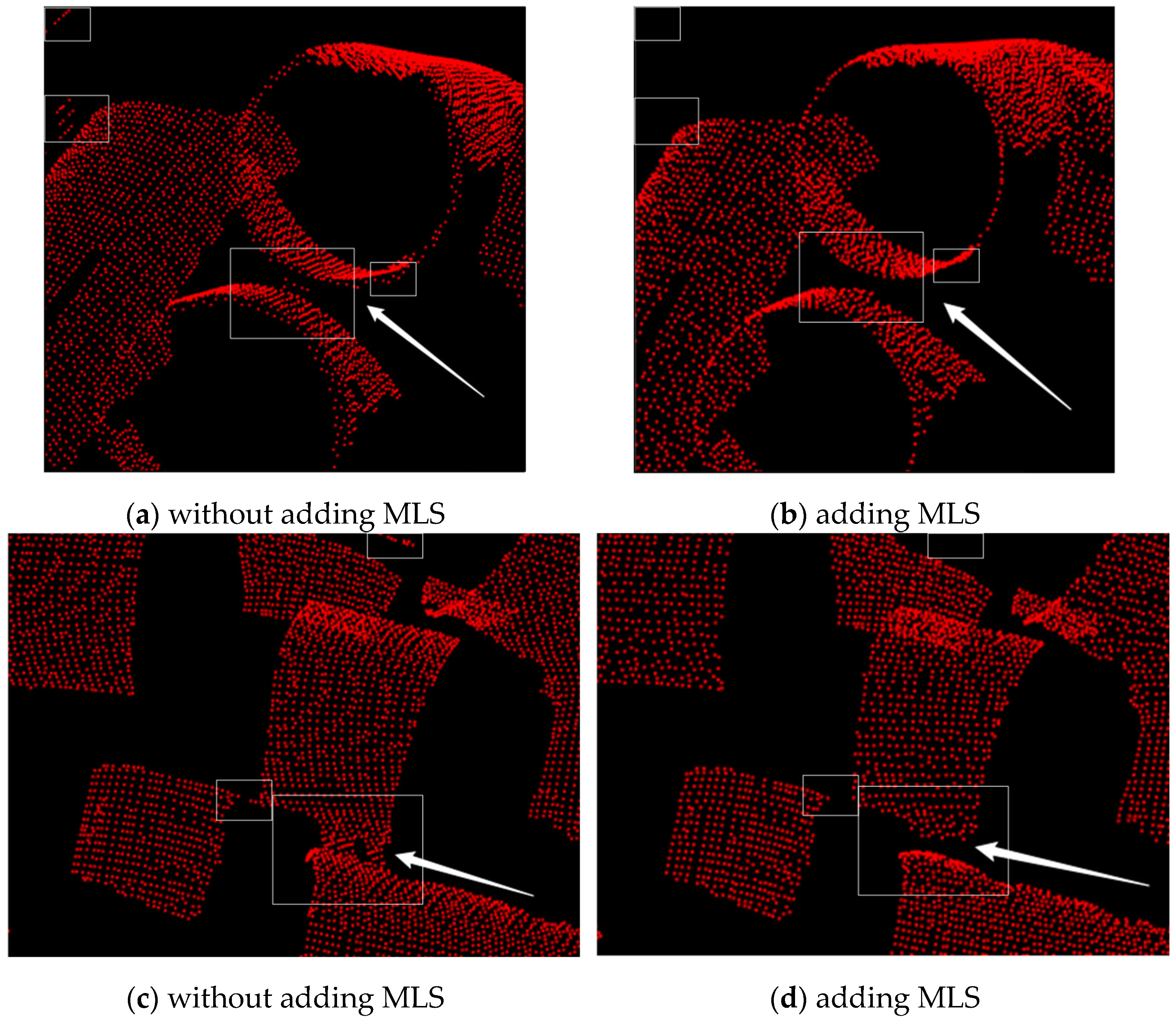
- An improved supervoxel over-segmentation algorithm with MLS surface fitting was proposed to effectively eliminate the adhesion caused by shooting angles and reflections. Additionally, the over-segmentation method performs data simplification.
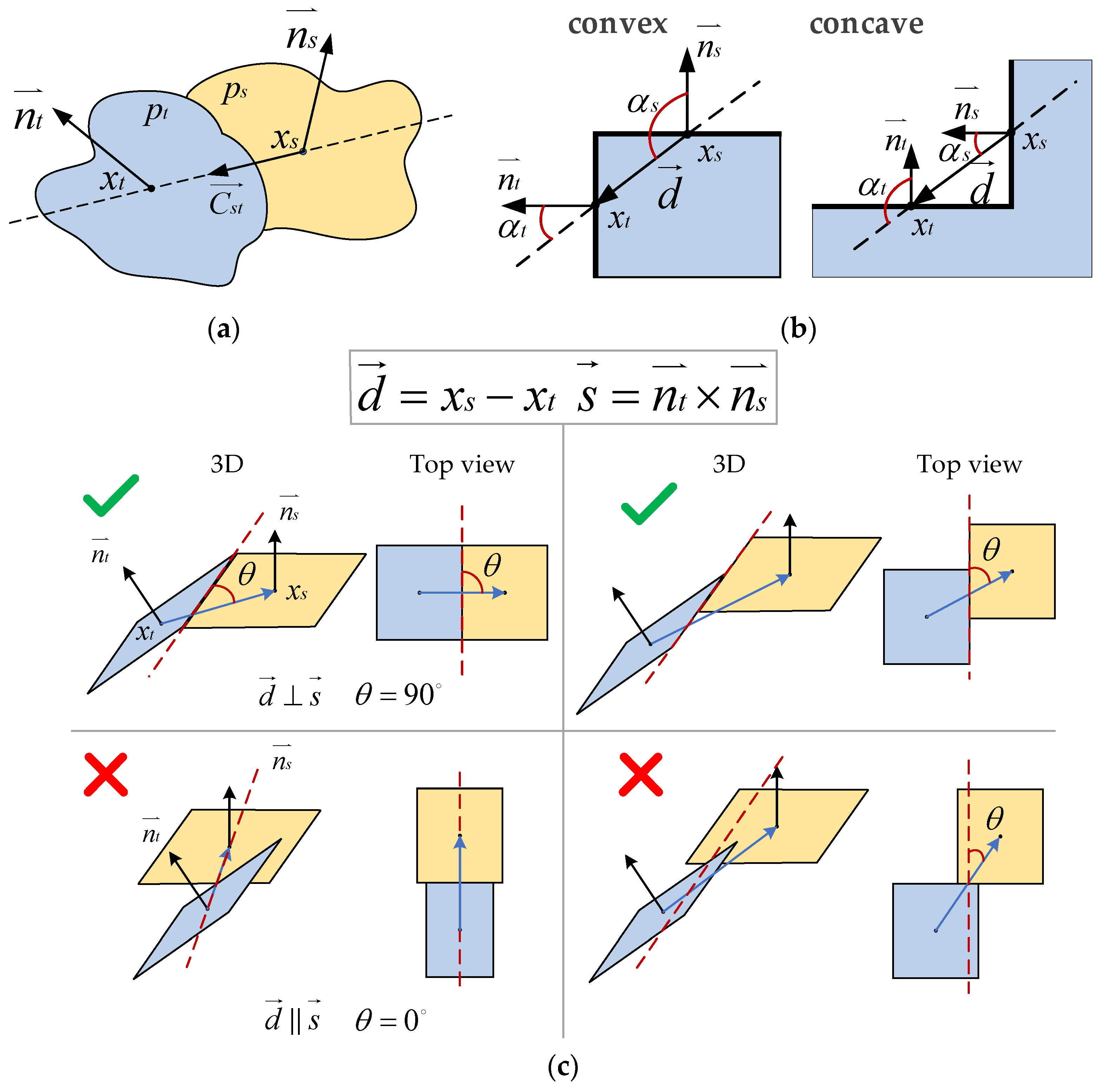
- A multi-feature metric combined with convexity-concavity judgment was proposed. An adaptive approach was added to this metric to normalize different features. According to the metric, over-segmentation patches can be merged via the proposed merging algorithm.
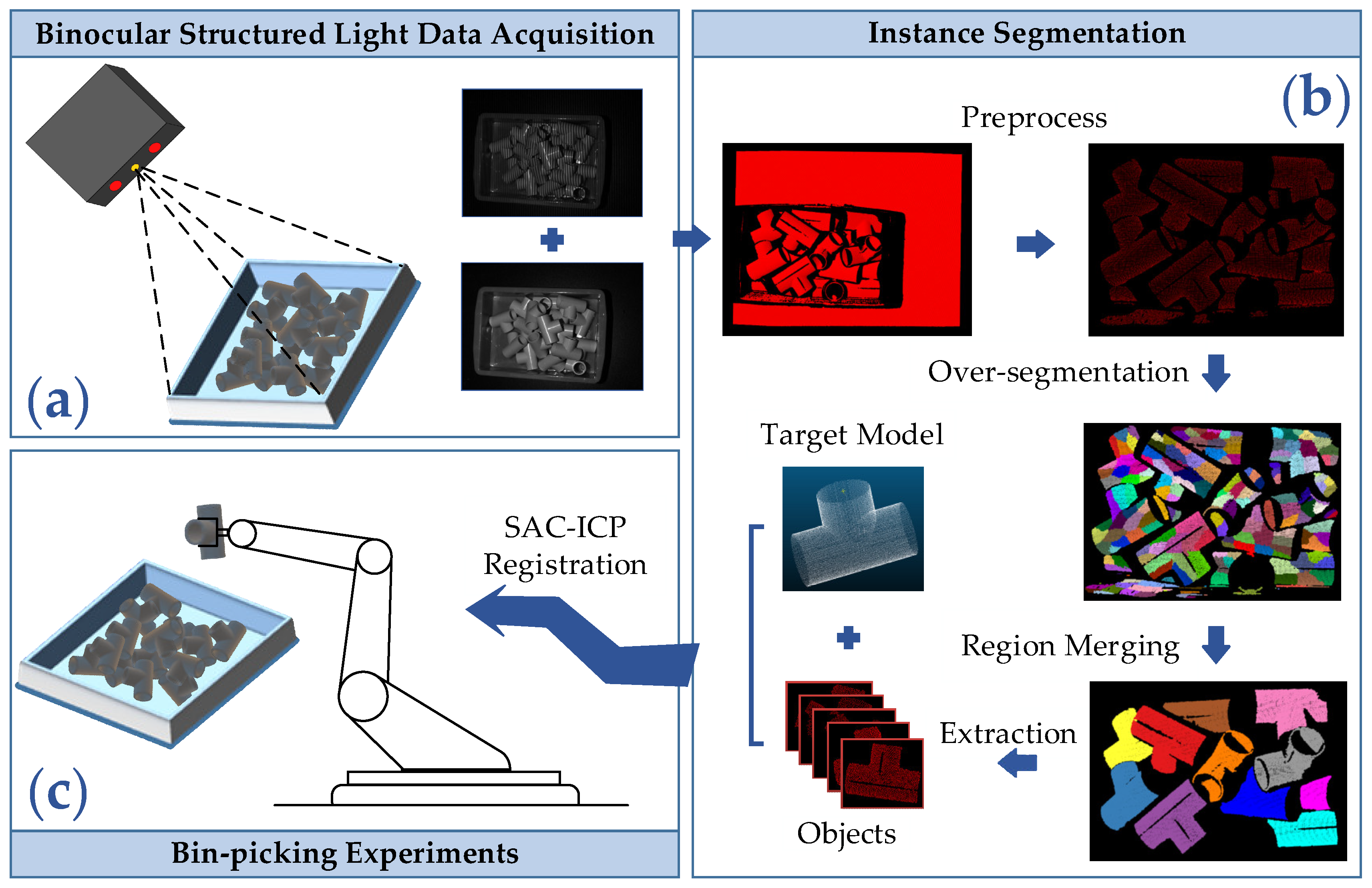
2. Methods
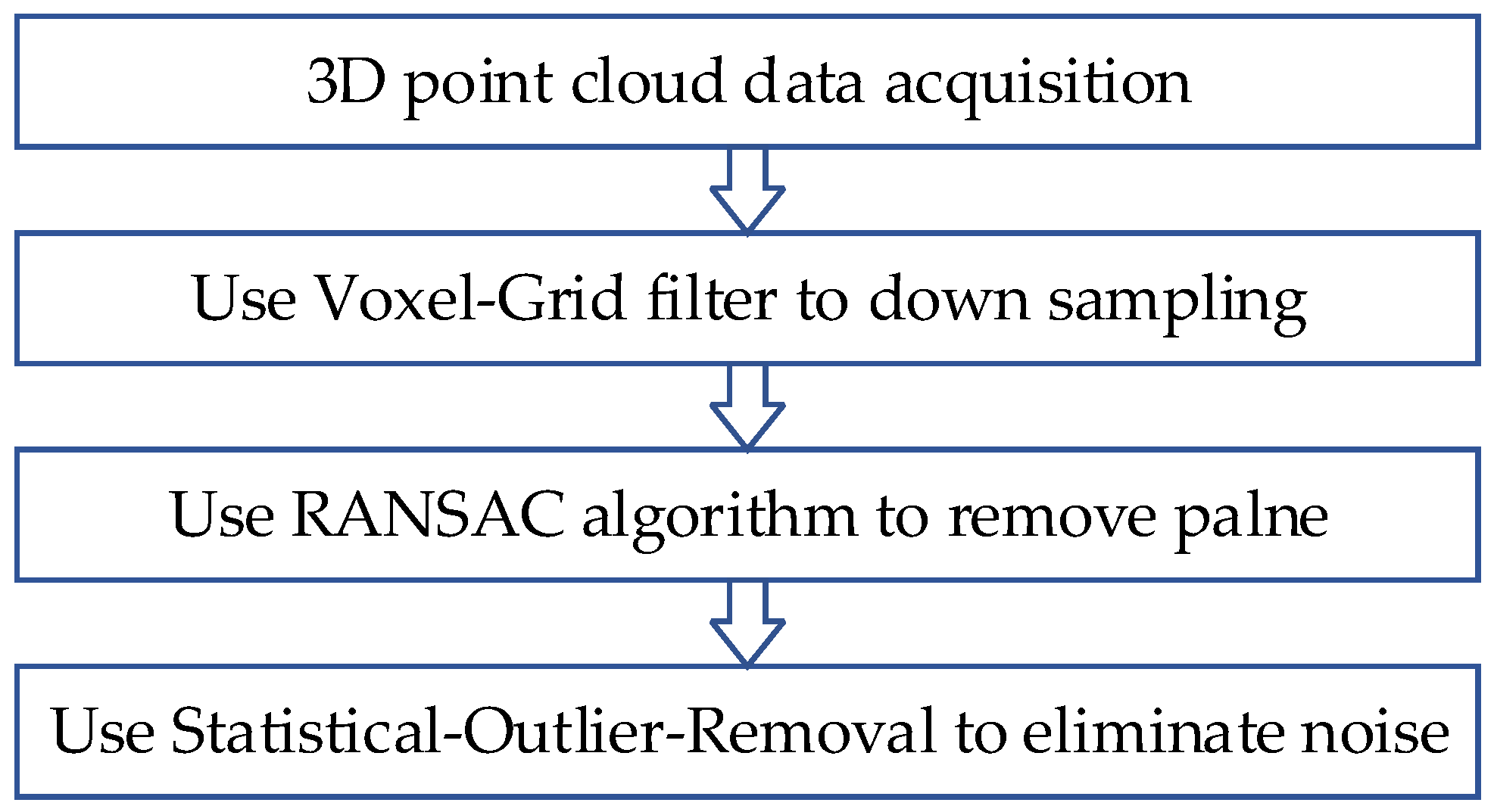
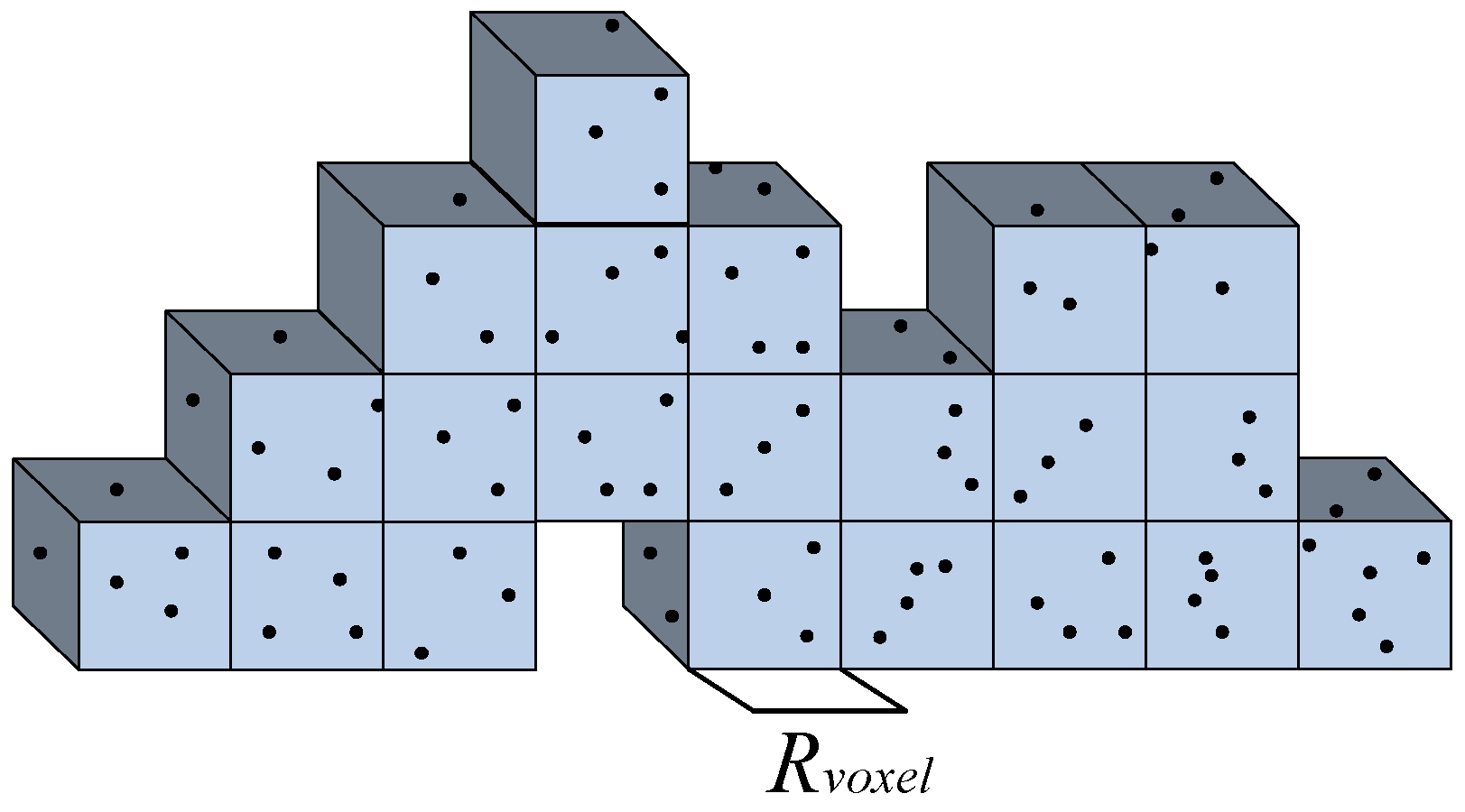
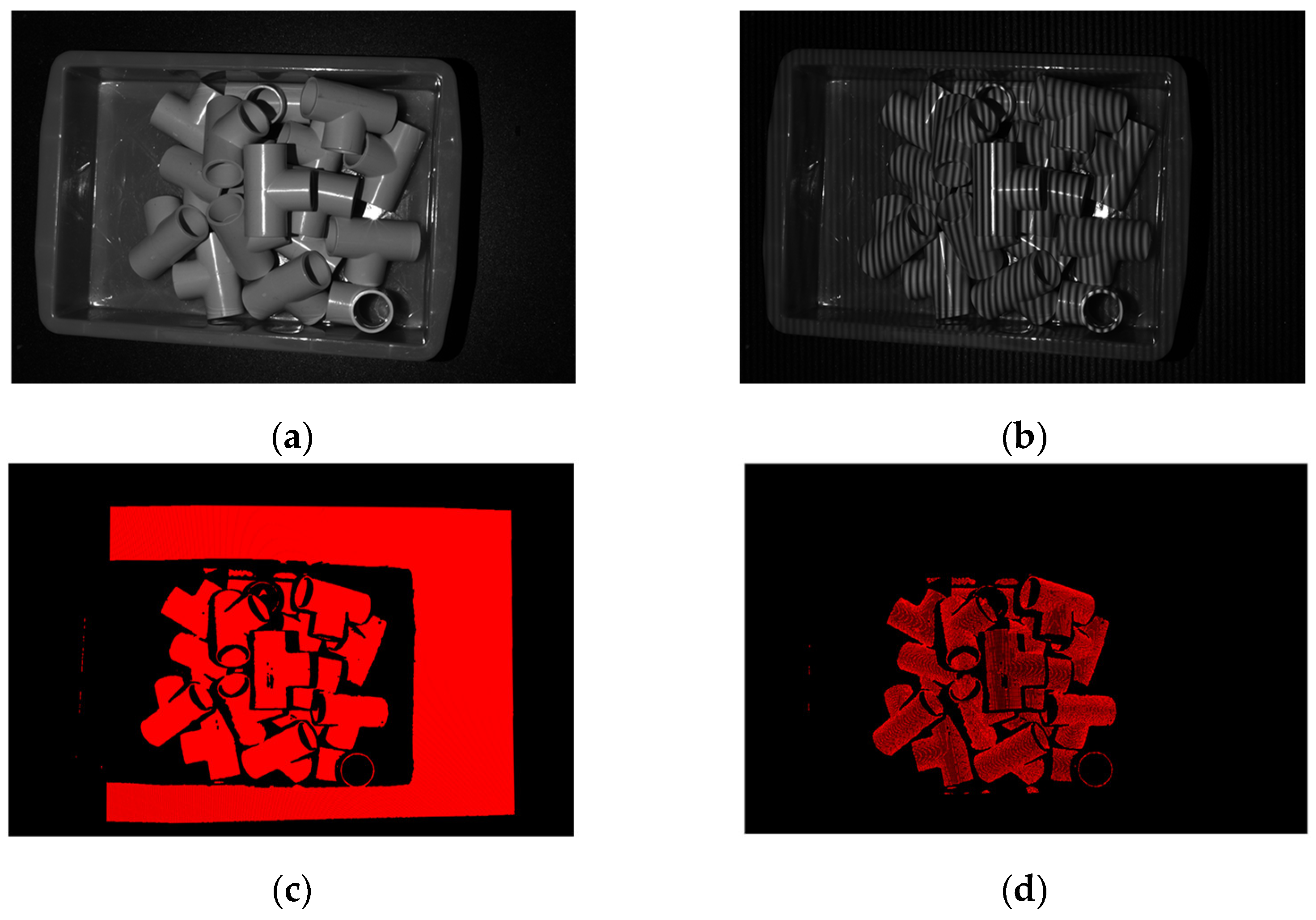
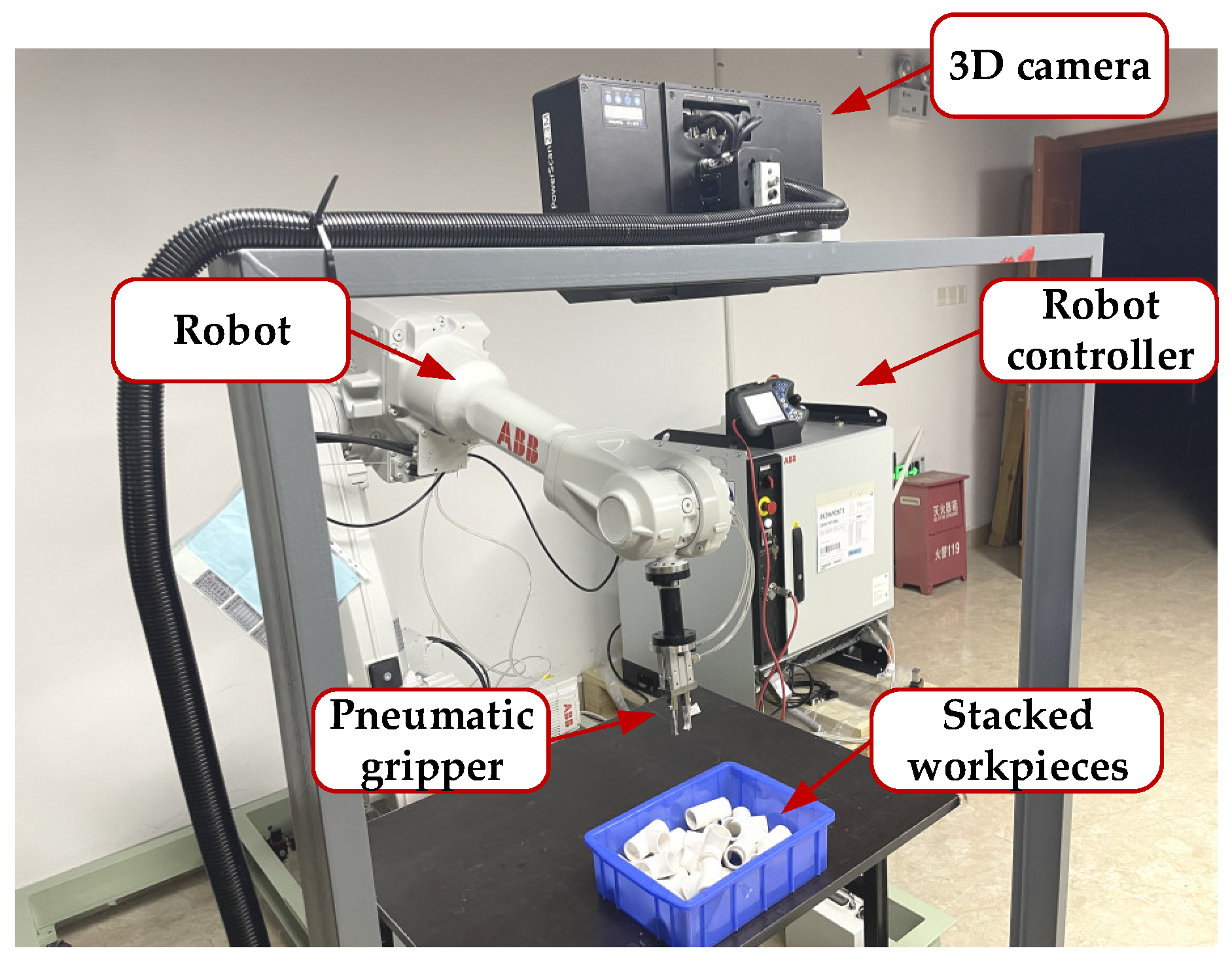
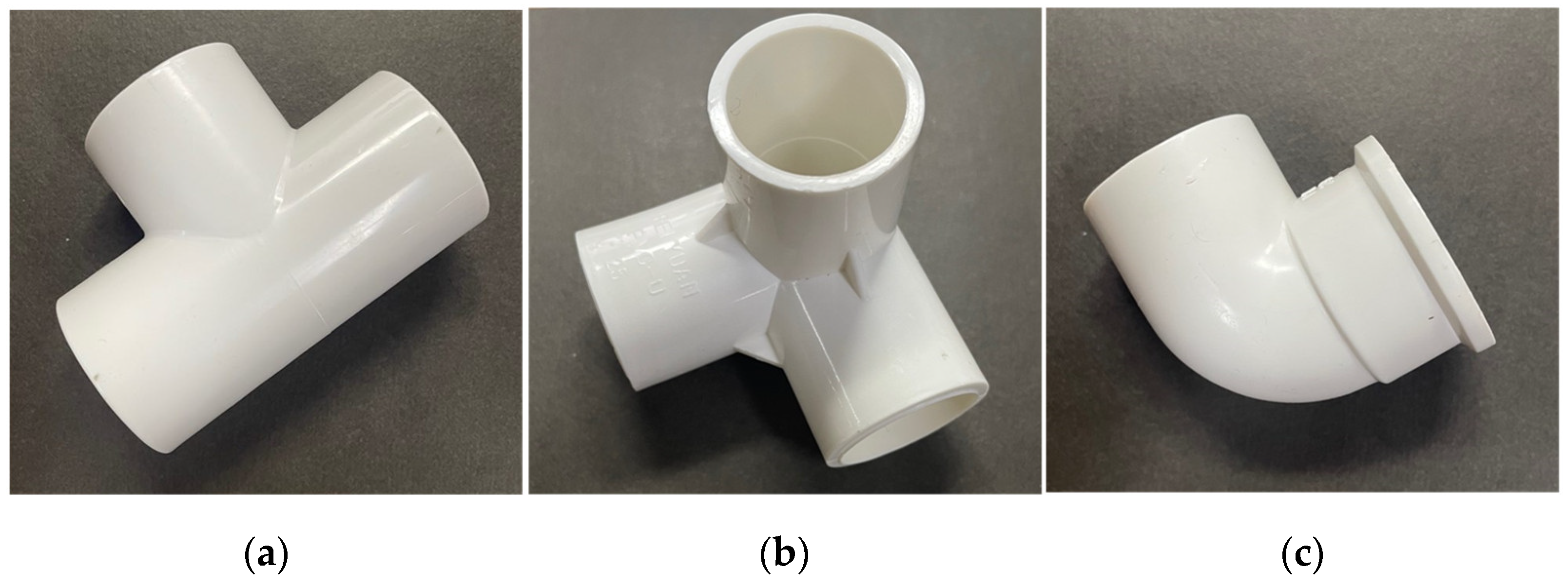
2.1. Data Acquisition and Preprocessing
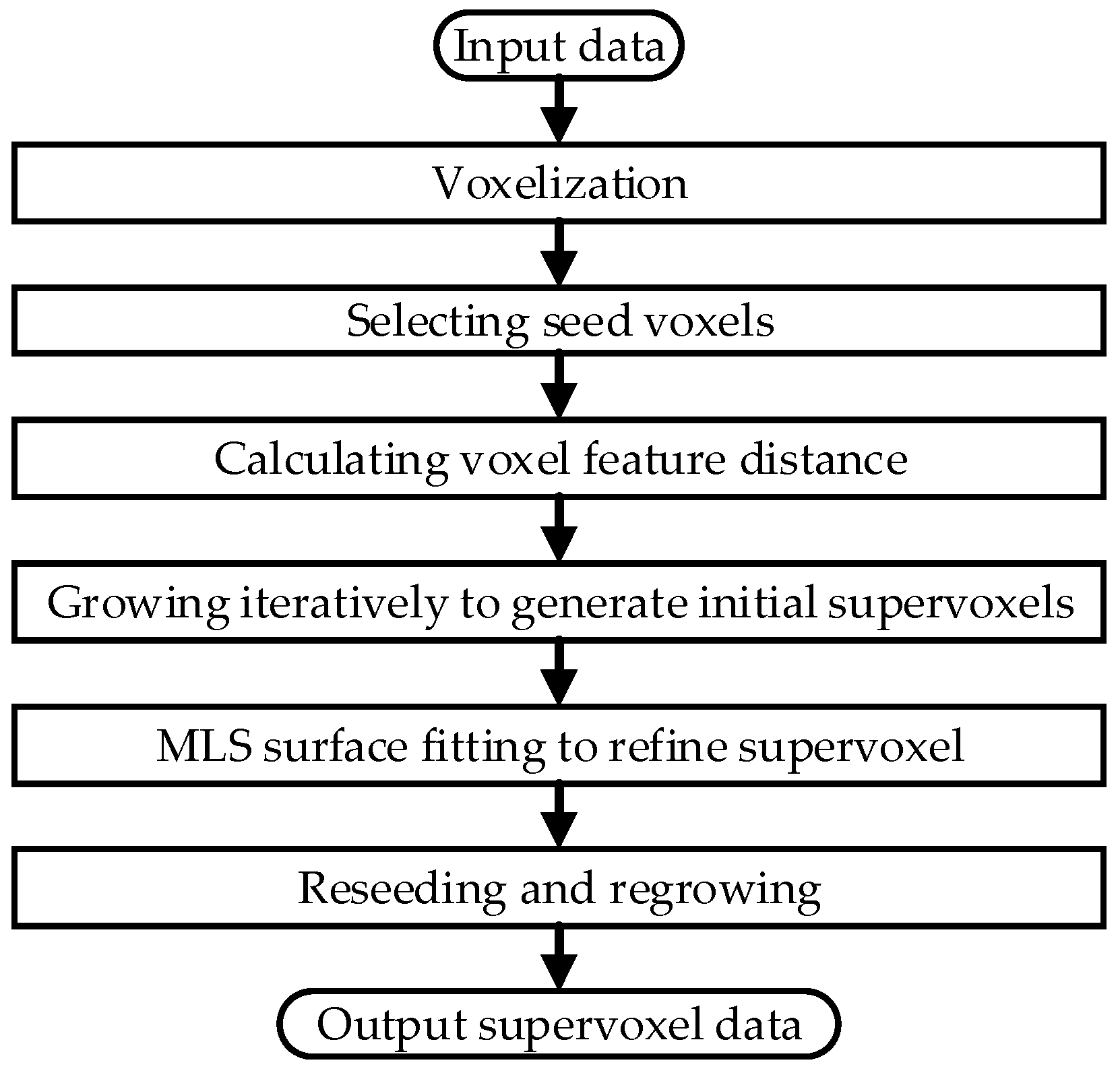
2.2. Over-Segmentation Based on Supervoxels and MLS Surface Fitting
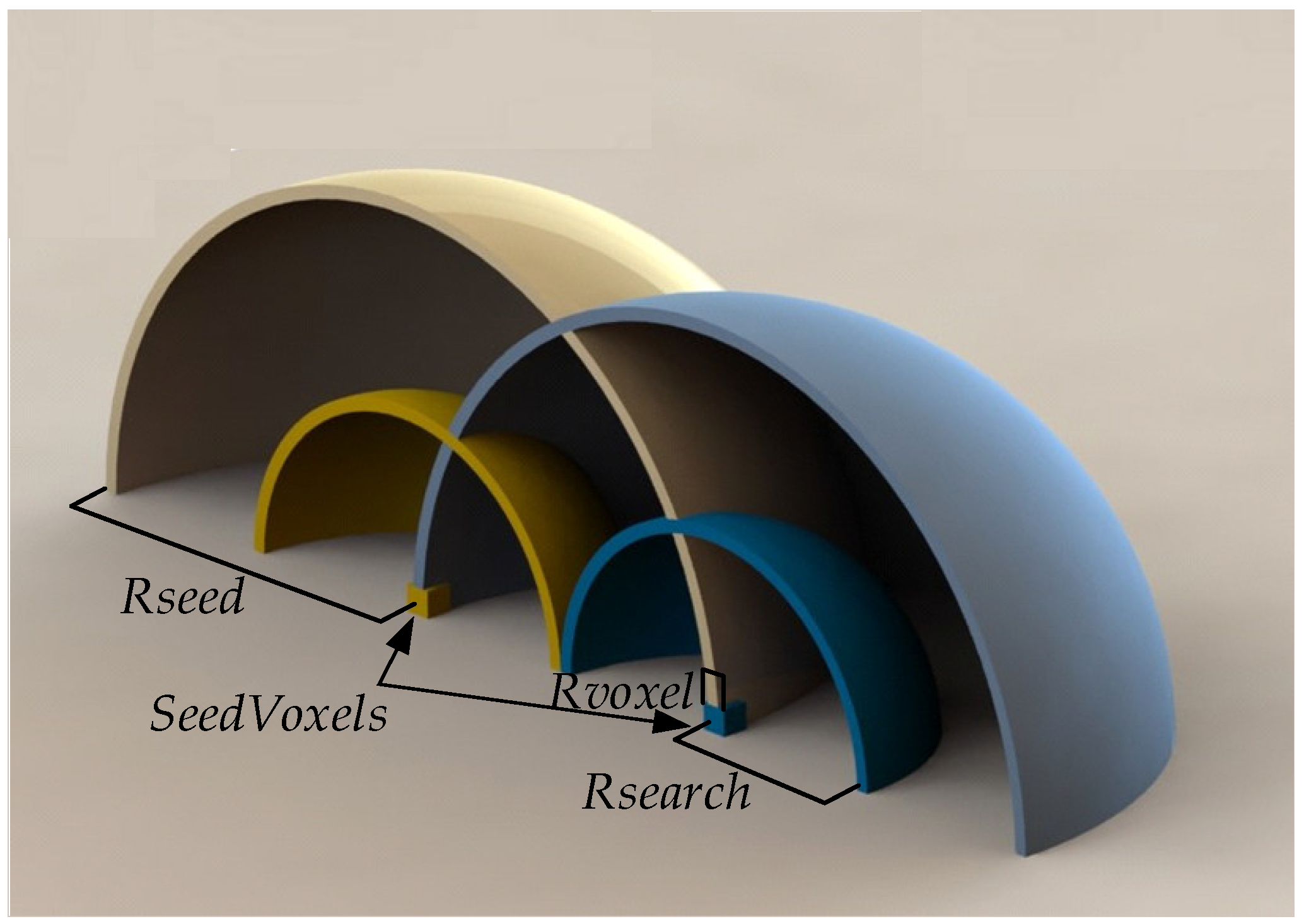
2.2.1. The Selection of Seed Voxels
2.2.2. Voxel Feature Distance
2.2.3. MLS Surface Fitting
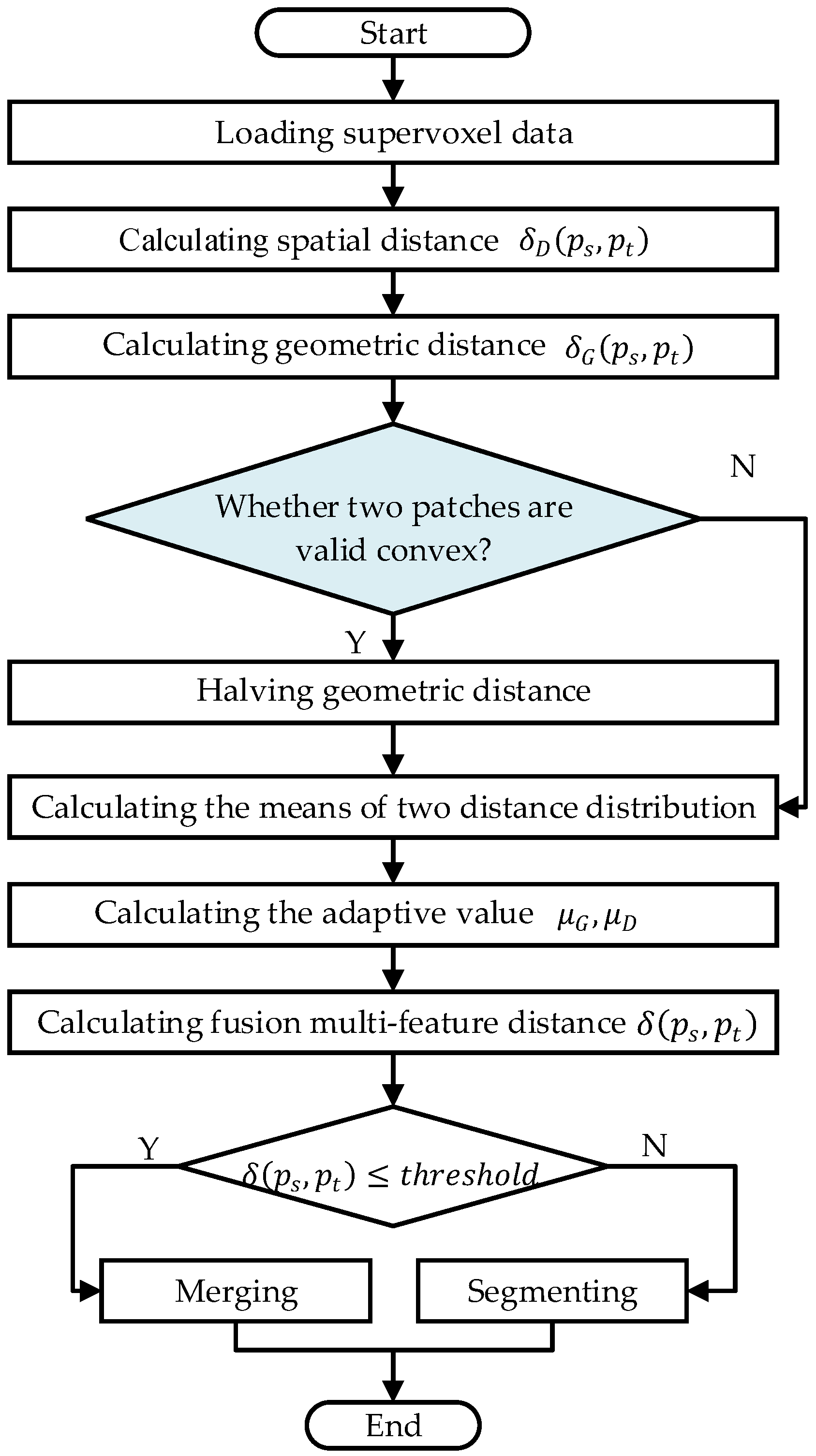
2.3. Region Merging Based on Multi-Feature with Convexity Judgment
2.4. Evaluation
3. Experimental Results and Discussion
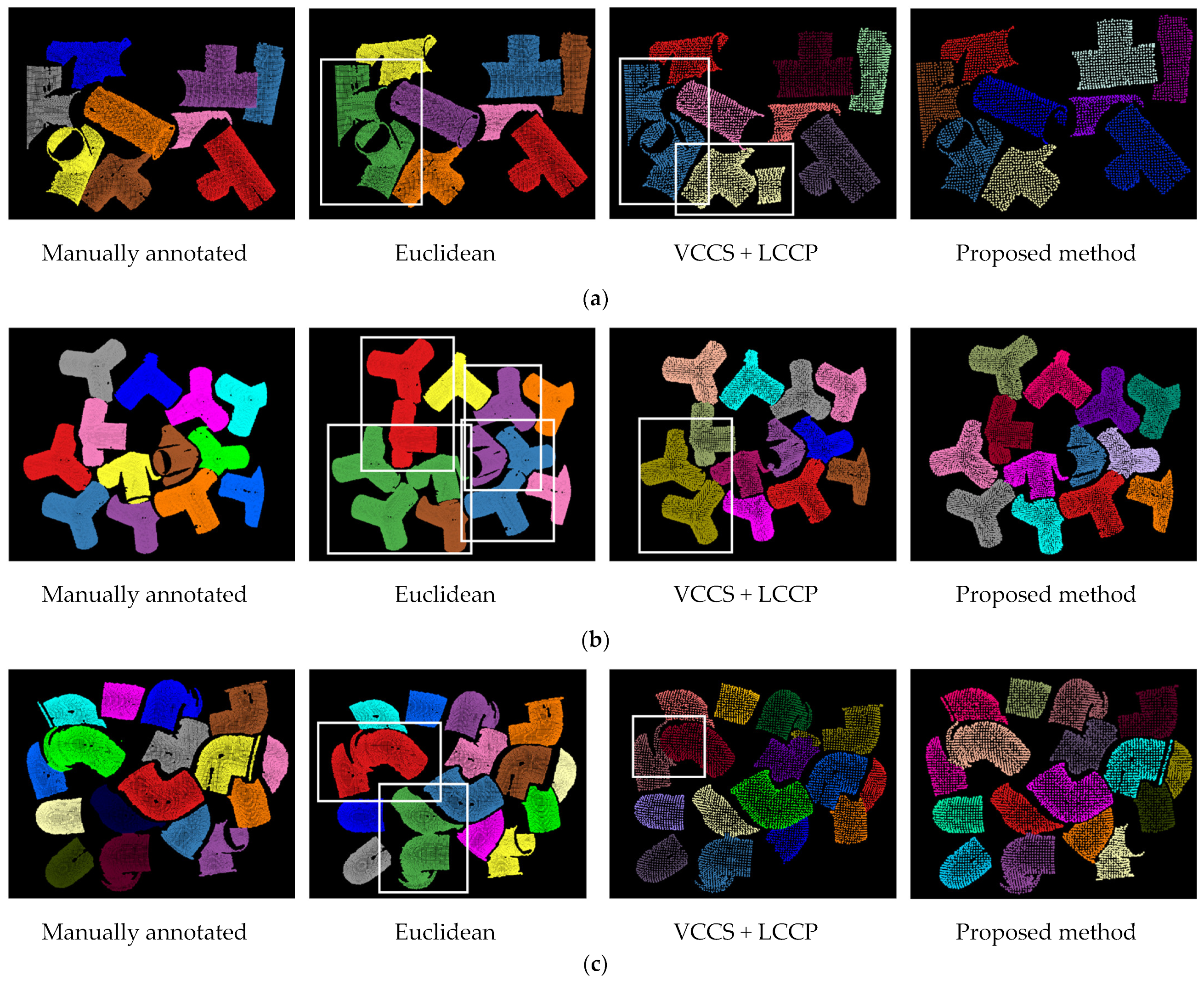
3.1. Instance Segmentation Experiments
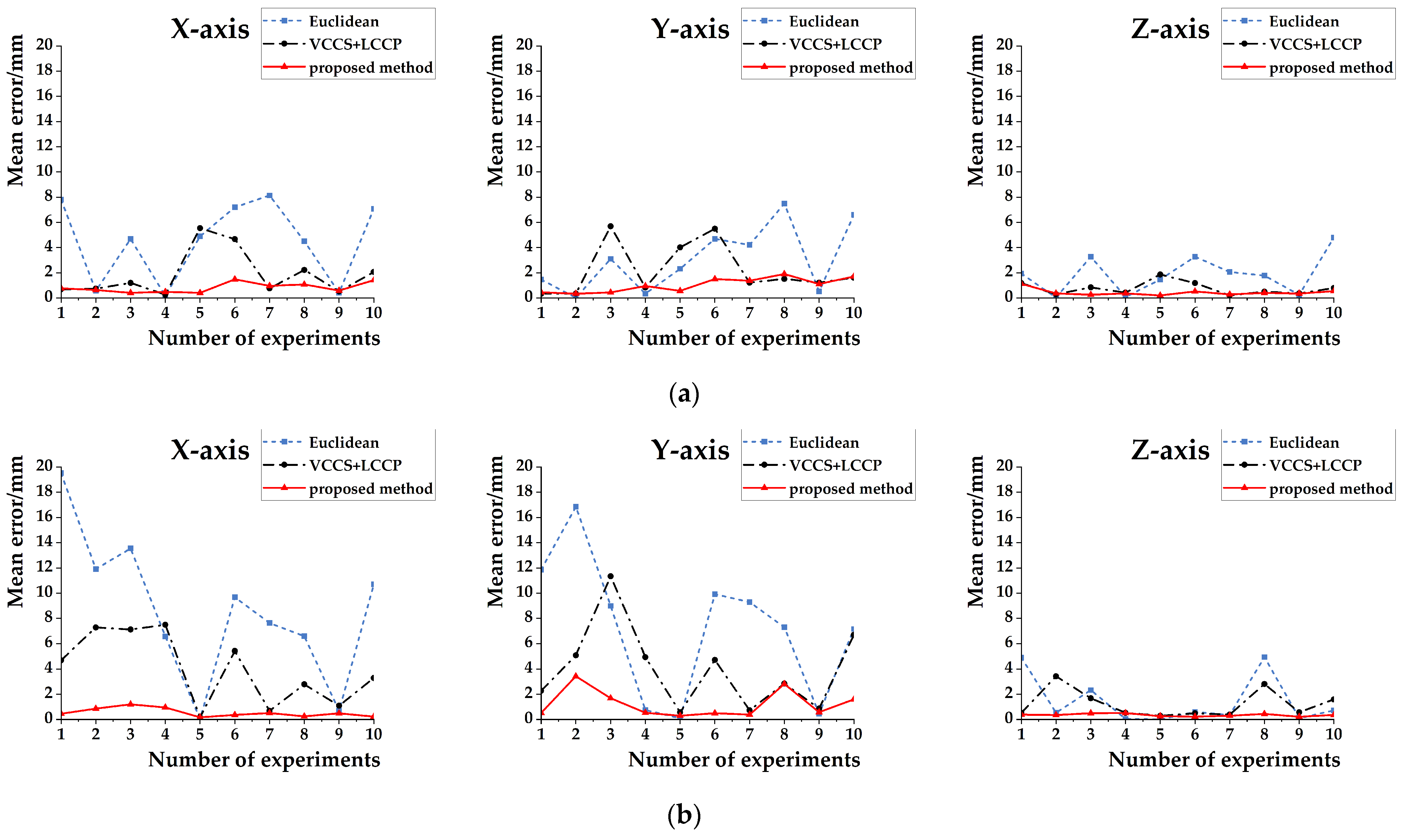
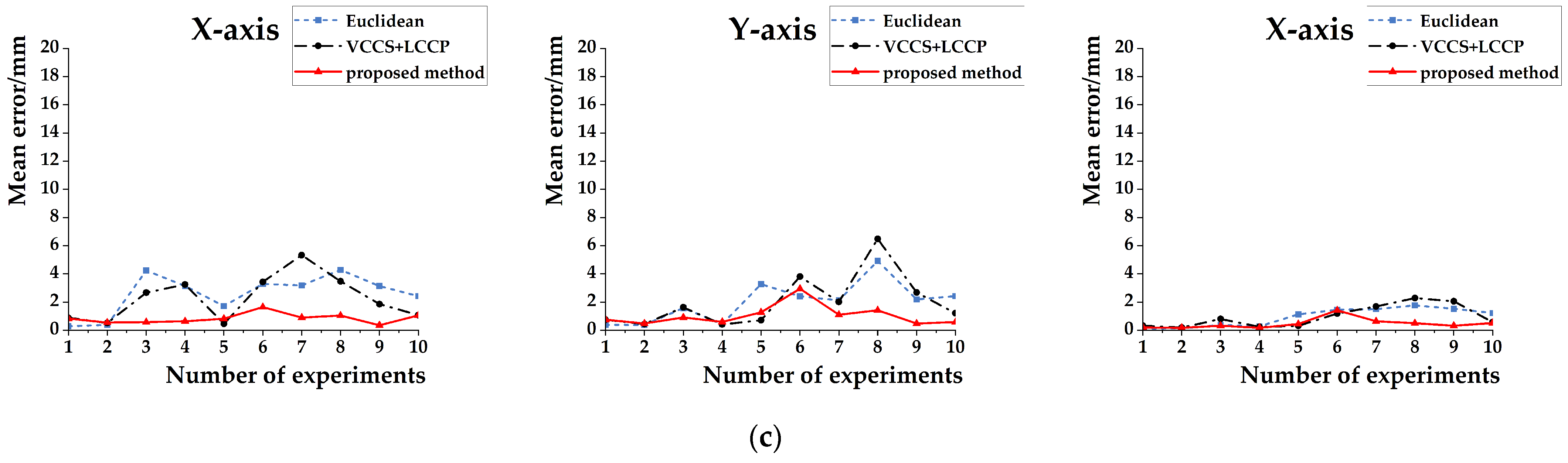
3.2. SAC-ICP Registration Experiments
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Gao, H.J.; Ye, C.; Lin, W.Y.; Qiu, J.B. Complex Workpiece Positioning System with Nonrigid Registration Method for 6-DoFs Automatic Spray Painting Robot. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 7305–7313. [Google Scholar] [CrossRef]
- Tamadazte, B.; Renevier, R.; Seon, J.A.; Kudryavtsev, A.V.; Andreff, N. Laser Beam Steering Along Three-Dimensional Paths. IEEE/ASME Trans. Mechatron. 2018, 23, 1148–1158. [Google Scholar] [CrossRef]
- Diao, S.P.; Chen, X.D.; Luo, J.H. Development and Experimental Evaluation of a 3D Vision System for Grinding Robot. Sensors 2018, 18, 3078. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Balatti, P.; Leonori, M.; Ajoudani, A. A flexible and collaborative approach to robotic box-filling and item sorting. Robot. Auton. Syst. 2021, 146, 103888. [Google Scholar] [CrossRef]
- Liang, P.; Lin, W.; Luo, G.; Zhang, C. Research of Hand–Eye System with 3D Vision towards Flexible Assembly Application. Electronics 2022, 11, 354. [Google Scholar] [CrossRef]
- Lin, C.-C.; Kuo, C.-H.; Chiang, H.-T. CNN-Based Classification for Point Cloud Object with Bearing Angle Image. IEEE Sens. J. 2022, 22, 1003–1011. [Google Scholar] [CrossRef]
- Xu, H.; Chen, G.D.; Wang, Z.H.; Sun, L.N.; Su, F. RGB-D-Based Pose Estimation of Workpieces with Semantic Segmentation and Point Cloud Registration. Sensors 2019, 19, 1873. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.L.; Xu, C.Q.; Dai, L.; Zhang, J.; Zhong, R. An Unequal Deep Learning Approach for 3-D Point Cloud Segmentation. IEEE Trans. Ind. Inform. 2021, 17, 7913–7922. [Google Scholar] [CrossRef]
- Hua, B.S.; Tran, M.K.; Yeung, S.K. Pointwise Convolutional Neural Networks. In Proceedings of the 31st IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 18–23 June 2018. [Google Scholar]
- Du, J.; Jiang, Z.; Huang, S.; Wang, Z.; Su, J.; Su, S.; Wu, Y.; Cai, G. Point Cloud Semantic Segmentation Network Based on Multi-Scale Feature Fusion. Sensors 2021, 21, 1625. [Google Scholar] [CrossRef]
- Sansoni, G.; Bellandi, P.; Leoni, F.; Docchio, F. Optoranger: A 3D pattern matching method for bin picking applications. Opt. Lasers Eng. 2014, 54, 222–231. [Google Scholar] [CrossRef]
- Zhao, L.; Li, Z.; Men, C.; Liu, Y. Superpixels extracted via region fusion with boundary constraint. J. Vis. Commun. Image Represent. 2020, 66, 102743. [Google Scholar] [CrossRef]
- Xu, Y.; Ye, Z.; Yao, W.; Huang, R.; Tong, X.; Hoegner, L.; Stilla, U. Classification of LiDAR Point Clouds Using Supervoxel-Based Detrended Feature and Perception-Weighted Graphical Model. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 72–88. [Google Scholar] [CrossRef]
- Ni, H.; Niu, X. SVLA: A compact supervoxel segmentation method based on local allocation. ISPRS J. Photogramm. Remote Sens. 2020, 163, 300–311. [Google Scholar] [CrossRef]
- Dong, Y.; Yang, W.; Wang, J.; Zhao, Z.; Wang, S.; Cui, Q.; Qiang, Y. An improved supervoxel 3D region growing method based on PET/CT multimodal data for segmentation and reconstruction of GGNs. Multimed. Tools Appl. 2019, 79, 2309–2338. [Google Scholar] [CrossRef]
- Huang, S.-S.; Ma, Z.-Y.; Mu, T.-J.; Fu, H.; Hu, S.-M. Supervoxel Convolution for Online 3D Semantic Segmentation. ACM Trans. Graph. 2021, 40, 1–15. [Google Scholar] [CrossRef]
- Sha, Z.; Chen, Y.; Li, W.; Wang, C.; Nurunnabi, A.; Li, J. A Boundary-Enhanced Supervoxel method for Extraction of Road Edges in Mls Point Clouds. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, XLIII-B1-2020, 65–71. [Google Scholar] [CrossRef]
- Chen, W.; Liu, Q.; Hu, H.; Liu, J.; Wang, S.; Zhu, Q. Novel Laser-Based Obstacle Detection for Autonomous Robots on Unstructured Terrain. Sensors 2020, 20, 5048. [Google Scholar] [CrossRef]
- Li, H.; Liu, Y.; Men, C.; Fang, Y. A novel 3D point cloud segmentation algorithm based on multi-resolution supervoxel and MGS. Int. J. Remote Sens. 2021, 42, 8492–8525. [Google Scholar] [CrossRef]
- Lin, Y.; Wang, C.; Zhai, D.; Li, W.; Li, J. Toward better boundary preserved supervoxel segmentation for 3D point clouds. ISPRS J. Photogramm. Remote Sens. 2018, 143, 39–47. [Google Scholar] [CrossRef]
- Rusu, R.B.; Marton, Z.C.; Blodow, N.; Dolha, M.; Beetz, M. Towards 3D Point Cloud Based Object Maps for Household Environments. Robot. Auton. Syst. 2008, 56, 927–941. [Google Scholar] [CrossRef]
- Papon, J.; Abramov, A.; Schoeler, M.; Worgotter, F. Voxel Cloud Connectivity Segmentation—Supervoxels for Point Clouds. In Proceedings of the 26th IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Portland, OR, USA, 23–28 June 2013. [Google Scholar]
- Guarda, A.F.R.; Rodrigues, N.M.M.; Pereira, F. Constant Size Point Cloud Clustering: A Compact, Non-Overlapping Solution. IEEE Trans. Multimed. 2021, 23, 77–91. [Google Scholar] [CrossRef]
- Xiao, Y.; Chen, Z.; Lin, Z.; Cao, J.; Zhang, Y.J.; Lin, Y.; Wang, C. Merge-Swap Optimization Framework for Supervoxel Generation from Three-Dimensional Point Clouds. Remote Sens. 2020, 12, 473. [Google Scholar] [CrossRef] [Green Version]
- Alexa, M.; Behr, J.; Cohen-Or, D.; Fleishman, S.; Levin, D.L.C.C.P.; Silva, C.T. Computing and rendering point set surfaces. IEEE Trans. Vis. Comput. Graph. 2003, 9, 3–15. [Google Scholar] [CrossRef] [Green Version]
- Stein, S.C.; Schoeler, M.; Papon, J.; Worgotter, F. Object Partitioning using Local Convexity. In Proceedings of the 27th IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Columbus, OH, USA, 23–28 June 2014. [Google Scholar]
- Stein, S.C.; Worgotter, F.; Schoeler, M.; Papon, J.; Kulvicius, T. Convexity based object partitioning for robot applications. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014. [Google Scholar]
- Fouhey, D.F.; Gupta, A.; Hebert, M. Unfolding an Indoor Origami World. In Proceedings of the 13th European Conference on Computer Vision (ECCV), Zurich, Switzerland, 6–12 September 2014. [Google Scholar]
- Karpathy, A.; Miller, S.; Li, F.F. Object Discovery in 3D scenes via Shape Analysis. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Karlsruhe, Germany, 6–10 May 2013. [Google Scholar]
- Arun, K.S.; Huang, T.S.; Blostein, S.D. Least-Squares Fitting of 2 3-D Point Sets. IEEE Trans. Pattern Anal. Mach. Intell. 1987, 9, 699–700. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Choi, S.; Zhou, Q.Y.; Koltun, V. Robust Reconstruction of Indoor Scenes. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015. [Google Scholar]
- Biber, P. The normal distributions transform: A new approach to laser scan matching. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Las Vegas, NV, USA, 27–31 October 2003. [Google Scholar]
- Rusu, R.B.; Blodow, N.; Beetz, M. Fast Point Feature Histograms (FPFH) for 3D Registration. In Proceedings of the IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009. [Google Scholar]
- Besl, P.J.; McKay, N.D. A Method for Registration of 3-D Shapes. IEEE Trans. Pattern Anal. Mach. Intell. 1992, 14, 239–256. [Google Scholar] [CrossRef]
- Yuan, M.; Li, X.; Cheng, L.; Li, X.; Tan, H. A Coarse-to-Fine Registration Approach for Point Cloud Data with Bipartite Graph Structure. Electronics 2022, 11, 263. [Google Scholar] [CrossRef]
- Xu, G.; Pang, Y.; Bai, Z.; Wang, Y.; Lu, Z. A Fast Point Clouds Registration Algorithm for Laser Scanners. Appl. Sci. 2021, 11, 3426. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Experiments | Processed Data Size | VCCS | Proposed Method | ||
|---|---|---|---|---|---|
| After 1 | Simplifying Radio | After 1 | Simplifying Radio | ||
| 1 | 30,629 | 30,629 | 0 | 21,936 | 71.618% |
| 2 | 28,528 | 28,528 | 0 | 20,300 | 71.158% |
| 3 | 34,051 | 34,051 | 0 | 26,228 | 77.026% |
| 4 | 31,330 | 31,330 | 0 | 21,110 | 67.380% |
| 5 | 25,327 | 25,327 | 0 | 18,074 | 71.363% |
| 6 | 25,758 | 25,758 | 0 | 18,028 | 69.990% |
| 7 | 31,360 | 31,360 | 0 | 21,714 | 69.241% |
| 8 | 36,012 | 36,012 | 0 | 25,342 | 70.371% |
| 9 | 41,715 | 41,715 | 0 | 33,315 | 79.863% |
| 10 | 33,146 | 33,146 | 0 | 23,797 | 71.794% |
| Parameters | Euclidean | VCCS + LCCP | Proposed Method |
|---|---|---|---|
| Voxel size (search radius) | 2 mm | 2 mm | 2 mm |
| Seed size | \ | 8 mm | 8 mm |
| Threshold 1 (highest accuracy) | \ | 10°/5°/20° | 0.25/0.25/0.35 |
| Workpieces | Methods | Pre-Average | Reg-Average |
|---|---|---|---|
| Tee pipe 1 | Euclidean | 0.835 | 0.705 |
| VCCS + LCCP | 0.943 | 0.831 | |
| VCCS + our merging | 0.915 | 0.780 | |
| Our over-segmentation + LCCP | 0.934 | 0.868 | |
| Proposed method | 0.988 | 0.936 | |
| Tee pipe 2 | Euclidean | 0.796 | 0.643 |
| VCCS + LCCP | 0.899 | 0.828 | |
| VCCS + our merging | 0.906 | 0.836 | |
| Our over-segmentation + LCCP | 0.917 | 0.855 | |
| Proposed method | 0.984 | 0.975 | |
| Two-way elbow | Euclidean | 0.908 | 0.813 |
| VCCS + LCCP | 0.928 | 0.845 | |
| VCCS + our merging | 0.926 | 0.840 | |
| Our over-segmentation + LCCP | 0.974 | 0.942 | |
| Proposed method | 0.988 | 0.958 |
| Workpieces | Methods | MSE | High Registration Rate | Running Time/ms |
|---|---|---|---|---|
| Tee pipe 1 | Euclidean | 36.546 | 0.423 | 10,564.733 |
| VCCS + LCCP | 4.632 | 0.670 | 2535.233 | |
| VCCS + our merging | 8.055 | 0.568 | 2171.403 | |
| Our over-segmentation + LCCP | 4.402 | 0.699 | 1996.968 | |
| Proposed method | 2.003 | 0.749 | 1892.472 | |
| Tee pipe 2 | Euclidean | 101.968 | 0.299 | 13,506.750 |
| VCCS + LCCP | 24.064 | 0.649 | 3399.876 | |
| VCCS + our merging | 19.626 | 0.639 | 2944.655 | |
| Our over-segmentation + LCCP | 12.095 | 0.743 | 2719.517 | |
| Proposed method | 1.595 | 0.862 | 2368.400 | |
| Two-way elbow | Euclidean | 5.590 | 0.572 | 12,193.280 |
| VCCS + LCCP | 5.471 | 0.578 | 1965.480 | |
| VCCS + our merging | 5.712 | 0.546 | 2371.985 | |
| Our over-segmentation + LCCP | 2.641 | 0.620 | 1746.778 | |
| Proposed method | 2.559 | 0.708 | 1595.524 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xie, Z.; Liang, P.; Tao, J.; Zeng, L.; Zhao, Z.; Cheng, X.; Zhang, J.; Zhang, C. An Improved Supervoxel Clustering Algorithm of 3D Point Clouds for the Localization of Industrial Robots. Electronics 2022, 11, 1612. https://doi.org/10.3390/electronics11101612
Xie Z, Liang P, Tao J, Zeng L, Zhao Z, Cheng X, Zhang J, Zhang C. An Improved Supervoxel Clustering Algorithm of 3D Point Clouds for the Localization of Industrial Robots. Electronics. 2022; 11(10):1612. https://doi.org/10.3390/electronics11101612
Chicago/Turabian StyleXie, Zhexin, Peidong Liang, Jin Tao, Liang Zeng, Ziyang Zhao, Xiang Cheng, Jianhuan Zhang, and Chentao Zhang. 2022. "An Improved Supervoxel Clustering Algorithm of 3D Point Clouds for the Localization of Industrial Robots" Electronics 11, no. 10: 1612. https://doi.org/10.3390/electronics11101612
APA StyleXie, Z., Liang, P., Tao, J., Zeng, L., Zhao, Z., Cheng, X., Zhang, J., & Zhang, C. (2022). An Improved Supervoxel Clustering Algorithm of 3D Point Clouds for the Localization of Industrial Robots. Electronics, 11(10), 1612. https://doi.org/10.3390/electronics11101612